全自动驾驶(FSD,Full Self-Driving)自动驾驶热点技术的成熟之处就是能判断道路修复修路,能自动利用类似“人眼”的摄像头进行驾驶!值得学习!
全自动驾驶(FSD,Full Self-Driving)软件是自动驾驶领域中的热点技术,其核心目标是实现车辆在各种复杂交通环境下的安全、稳定、高效自动驾驶。FSD软件的技术核心涉及多个方面的交叉技术,下面将详细分析说明其主要核心技术组成:
1. 感知系统
感知是自动驾驶的“眼睛”,其主要任务是实时采集并理解车辆周围的环境信息,主要技术包括:
传感器融合(Sensor Fusion):
结合摄像头、激光雷达(LiDAR)、雷达、超声波传感器等多种数据源,利用机器学习和传统算法将多源异构数据进行融合,形成对障碍物、行人、车辆等目标的精确检测和跟踪。
计算机视觉(Computer Vision):
运用深度学习卷积神经网络(CNN)、目标检测、语义分割、实例分割等技术,从摄像头采集的图像中提取道路标志、车道线、交通信号灯等关键信息,并进行场景理解。
深度学习目标检测与跟踪:
利用神经网络实现目标检测、分类、定位以及跟踪,检测远处或遮挡目标,保障行车安全。
2. 定位与地图构建
定位系统为自动驾驶提供车辆在全球范围内的位置信息,同时配合高精度地图与实时校正实现精确定位。
高精度定位(High-Precision Localization):
通常采用GPS、惯性导航系统(IMU)和传感器数据融合来实现厘米级甚至毫米级的精度定位。
高精地图(HD Map):
高精地图包含道路几何、车道线、交通标志、周边环境等详细信息,为决策规划提供参考依据。地图构建和动态更新是关键难点,要求实时性和高精度数据支持。
同时定位与地图构建(SLAM):
对于未知环境或者需要实时更新地图的场景,SLAM技术可以帮助车辆构建局部地图并同时定位,有助于补偿GPS信号弱或者丢失的情况。
3. 决策规划
决策规划是FSD软件的“大脑”,负责根据感知输入、地图数据和交通规则制定最优的行驶策略与路径规划。
行为决策(Behavioral Decision Making):
根据交通情景、周边动态目标和驾驶策略模型,制定超车、变道、转弯、避障等行为决策,保障交通安全与行驶舒适性。
路径规划(Path Planning):
包括全局路径规划与局部路径规划。全局路径规划为车辆提供从起点到目的地的最优路网行驶方案,而局部路径规划则结合实时环境信息生成车辆当前状态下的最优路径,确保车辆随时能够灵活应对动态变化的交通环境。
运动控制(Motion Control):
根据决策生成的路径,对车辆的加速、制动、转向等进行精准控制,确保车辆按规划轨迹安全行驶。闭环反馈控制及鲁棒性设计是关键,以考虑突发状况和系统误差。
4. 学习与预测
自动驾驶系统需要不断学习和预测其他道路使用者的行为,提升决策的可靠性与安全性。
行为预测(Behavior Prediction):
利用历史轨迹、意图模型及深度学习预测行人、车辆等目标的动态行为。准确的预测有助于提前规划和主动规避潜在危险。
强化学习与自监督学习:
通过模拟和实际道路驾驶数据不断优化决策策略。一些FSD系统利用强化学习技术进行决策策略的训练,利用奖励机制不断完善自主学习效果。另外,自监督学习也帮助系统从大量无标注数据中提取有效特征,提升算法鲁棒性。
数据驱动与端到端学习:
有部分研究尝试用端到端的方法从原始传感器数据直接映射到驾驶控制输出,尽管在特定场景下效果令人瞩目,但大规模推广仍需谨慎考量模型的鲁棒性和解释性问题。
5. 云端协同与实时更新
FSD的发展不仅依赖于车载系统的高效计算,还需要通过云端平台实现数据共享、模型更新和协同决策。
大数据支持:
车辆持续向云端回传数据,通过大数据分析不断改进算法和地图精度。同时,云端协同为不同车辆之间的信息共享提供支持。
OTA(Over-The-Air)更新:
由于自动驾驶技术日新月异,FSD系统需要及时更新软件版本、算法模型和地图数据,所有这些都是通过安全、可靠的OTA更新机制来实现的,确保车辆系统始终跟上最新技术水平。
6. 安全性与冗余设计
自动驾驶系统的安全性和稳定性是推广应用的核心,涉及系统设计的多个层次。
系统冗余:
从传感器到计算单元、执行机构都需要冗余设计,确保系统在硬件或软件故障时仍能保持基本功能和安全策略。
安全监控与故障诊断:
实时监测各个子系统状态,对潜在故障进行预警,并在必要时采取应急措施,如安全停车或切换到手动驾驶模式。
法规与道德考虑:
自动驾驶不仅需要技术上的保障,法律合规和道德决策也成为系统设计的一部分,确保在面临紧急情况时能够以最小的事故风险做出决策。
全自动驾驶(FSD)软件的技术核心是一个高度复杂且综合的系统,通过感知、定位、决策、预测、实时更新、冗余安全等多项技术协同,实现车辆在各种复杂交通场景下的自动化行驶。这其中涉及的每一项技术都面临着深奥的工程挑战和科学问题,而各大自动驾驶研发公司和研究机构正不断投入研发以推动这一领域的突破。今天,我们在不断进步的科技里看到一个未来愿景:让交通更加安全、高效,并将绿色出行理念贯彻到每一次驾驶决策中。
全自动驾驶(FSD):用 “人眼” 看懂修路,让机器学会 “变通”
一、修路场景:自动驾驶的终极考场
2025 年 3 月,一段特斯拉 FSD 挑战北京郊区泥巴路的视频引爆网络:在无车道线、无交通标志的临时施工路段,车辆不仅精准识别出挖掘机作业区域,还主动绕行对向车道,甚至在对向车辆驶来前提前停车避让。这段被网友称为 “封神操作” 的实测,标志着全自动驾驶技术(FSD)在复杂路况处理上的里程碑式突破。
修路场景为何成为自动驾驶的 “终极考场”?传统自动驾驶系统依赖的高精地图在此完全失效,而施工区域的临时路障、未铺装路面、移动警示灯等元素,对车辆的实时感知和决策能力提出了苛刻要求。例如,美国国家公路交通安全管理局(NHTSA)曾指出,2024 年涉及 FSD 的 240 万辆调查案例中,约 30% 的事故发生在施工区域。这暴露出早期系统对 “非常规障碍物” 的识别缺陷 —— 比如将黑色水泥桩误判为普通路面,或在夜间无法识别临时限速牌。
二、摄像头:比人眼更 “聪明” 的视觉系统
特斯拉 FSD 的核心突破,在于用 8 个摄像头构建了一套 “类人眼” 的感知体系。这些摄像头分布在车身不同位置,覆盖 360 度视角,其中前向三目摄像头可捕捉 250 米外的细节,侧方摄像头则专注于盲区监测。更关键的是,FSD 通过神经网络算法,将原始图像数据转化为 “可理解” 的驾驶语言:
动态环境建模:
FSD 每秒处理 25 亿像素的图像数据,通过Occupancy Network技术构建三维空间模型。例如,在施工路段,系统不仅能识别锥桶的位置,还能预测其移动趋势 —— 如果工人正在移动锥桶,FSD 会自动调整绕行路径。
语义理解能力:
传统摄像头只能识别物体轮廓,而 FSD 能 “看懂” 施工标志的含义。例如,当检测到 “前方施工,限速 60” 的临时路牌时,系统会同步调整巡航速度,并在导航界面显示红色警示。
极端环境适应:
FSD 的摄像头采用HDR(高动态范围)成像技术,在强光直射或暴雨天气下仍能保持图像清晰。配合去雾算法,系统在能见度低于 50 米的浓雾中,仍能识别 150 米外的施工围挡。
三、修路场景的技术突破
FSD 在修路场景的成熟,源于三大技术创新:
端到端的决策闭环:
传统自动驾驶将感知、规划、控制拆分为独立模块,信息传递存在损耗。而 FSD V12 版本采用端到端神经网络,直接将摄像头图像输入模型,输出方向盘转角和油门刹车指令。这种 “黑箱” 模式让系统能自主学习如何应对修路场景,例如在遇到未铺装路面时,自动降低车速并调整悬架高度。
数据驱动的场景库:
特斯拉通过 “影子模式” 收集全球用户的驾驶数据,每年积累超过 10 亿英里的真实路况。在修路场景中,系统已能识别 2000 多种施工标志组合,包括 “车道封闭”“绕行提示”“临时红绿灯” 等。例如,在京雄高速测试中,FSD 对 “前方施工,限速 60” 标志的识别距离达 200 米,决策响应时间仅 0.3 秒。
动态路径规划:
FSD 的路径规划算法引入强化学习,模拟人类驾驶员的 “试探 - 反馈” 过程。例如,在施工区域遇到对向车辆时,系统会先减速观察,再根据对方车辆的速度和距离,动态调整避让策略 —— 这与人类司机的 “先停后看” 逻辑完全一致。
四、挑战与未来:从 “能用” 到 “可靠”
尽管 FSD 在修路场景取得显著进步,但其成熟度仍面临三大挑战:
边缘场景的泛化能力:
第三方测试显示,FSD 对 “黑色水泥桩”“无标志临时改道” 等极端场景的漏检率仍达 15%。例如,2025 年 3 月小米 SU7 事故中,纯视觉方案未能识别黑色水泥桩,导致碰撞时速达 97km/h。
多传感器融合的争议:
特斯拉坚持纯视觉方案,而华为 ADS 3.0、极氪 NZP 等竞品采用 “激光雷达 + 高精地图” 组合。在雨雾天气下,激光雷达方案的识别距离可达 150 米,而 FSD 的摄像头仅能识别 60-80 米。
用户信任与法规滞后:
美国 NHTSA 调查显示,40% 的 FSD 用户在施工路段仍选择手动接管,反映出对系统可靠性的担忧。此外,全球仅有 12 个国家允许 FSD 在施工区域完全自动驾驶,法规滞后制约了技术落地。
五、结语:当机器学会 “变通”
从依赖高精地图的 “循规蹈矩”,到用摄像头 “看懂” 修路场景,FSD 的进化揭示了一个重要趋势:自动驾驶的核心不在于硬件堆砌,而在于让机器学会 “变通”。未来,随着车路协同(V2X)和生成式 AI的融合,车辆或将实现 “未卜先知”—— 例如,通过路侧传感器提前 500 米感知施工信息,并与云端数据实时交互。当机器能像人类一样 “随机应变” 时,真正的全自动驾驶时代才会到来。
相关文章:
自动驾驶热点技术的成熟之处就是能判断道路修复修路,能自动利用类似“人眼”的摄像头进行驾驶!值得学习!)
全自动驾驶(FSD,Full Self-Driving)自动驾驶热点技术的成熟之处就是能判断道路修复修路,能自动利用类似“人眼”的摄像头进行驾驶!值得学习!
全自动驾驶(FSD,Full Self-Driving)软件是自动驾驶领域中的热点技术,其核心目标是实现车辆在各种复杂交通环境下的安全、稳定、高效自动驾驶。FSD软件的技术核心涉及多个方面的交叉技术,下面将详细分析说明其主要核心技…...

SpringBoot项目动态加载jar 实战级别
网上也找到类似的文章,但是基本都不到实用级别,就是不能直接用。在参照网上的文章及与AI沟通N次后终于完善可以在实际项目上 创建jar文件动态加载类 Component Slf4j public class PluginRegistry {Autowiredprivate GenericApplicationContext applicat…...
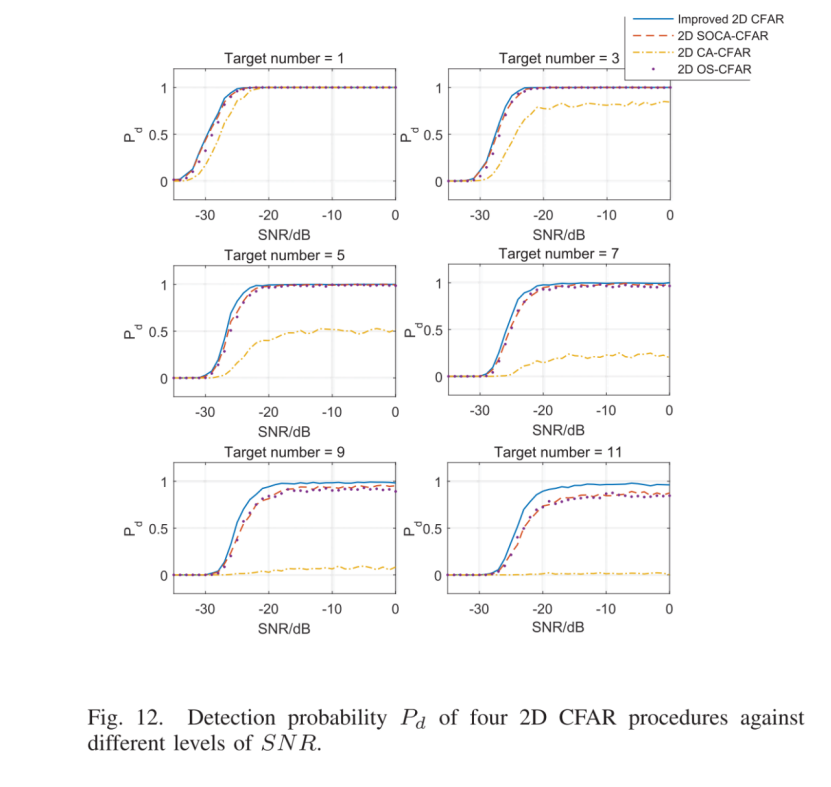
一种改进的CFAR算法用于目标检测(解决多目标掩蔽)
摘要 恒虚警率(CFAR)技术在雷达自动检测过程中起着关键作用。单元平均(CA)CFAR算法在几乎所有的多目标情况下都会受到掩蔽效应的影响。最小单元平均(SOCA)CFAR算法仅当干扰目标位于参考窗口的前后方时才具有…...

无人机+智能监控:石油管道巡检迈入“空中智慧时代”
引言:安全与效率的双重革命 在广袤的沙漠、崎岖的山脉或人迹罕至的冻土带,石油管道的安全巡检曾是一项耗时耗力且风险极高的任务。如今,随着无人机巡检技术与视频监控管理平台的深度融合,石油行业正迎来一场智能化变革——从“人巡…...
)
Python内置函数---anext()
用于异步迭代器的核心工具,专为处理异步数据流设计。 1. 基本语法 await anext(async_iterator, default) 参数: async_iterator :实现了异步迭代协议的对象(如异步生成器、异步迭代器类)。 default (可选…...

4.17学习总结
完成135. 分发糖果 - 力扣(LeetCode)的算法 学习了字节缓冲流和字符缓冲流,了解了底层的原理,...

【gpt生成-其一】以go语言为例,详细描述一下 :语法规范BNF/EBNF形式化描述
在 Go 语言中通过 EBNF 形式化描述语法规范需要结合语言规范文档的结构,以下是详细实现方法及标准规范示例: 一、Go 语法规范结构(基于 Go 1.21 标准) ebnf 复制 // 基础元素定义 letter "A" ... "Z&quo…...
)
用cython将python程序打包成C++动态库(windows+Vistual Studio2017平台)
作为一名程序员我们都知道Python的库可能要比C的丰富的多特别是在算法方面,但是有的时候我们的工程是用C开发的,我们又像用Python的这个库那怎么办呢?如果直接调.py程序,工程中代码有.py又有.cpp显得工程很杂乱。那么我么可以借助…...
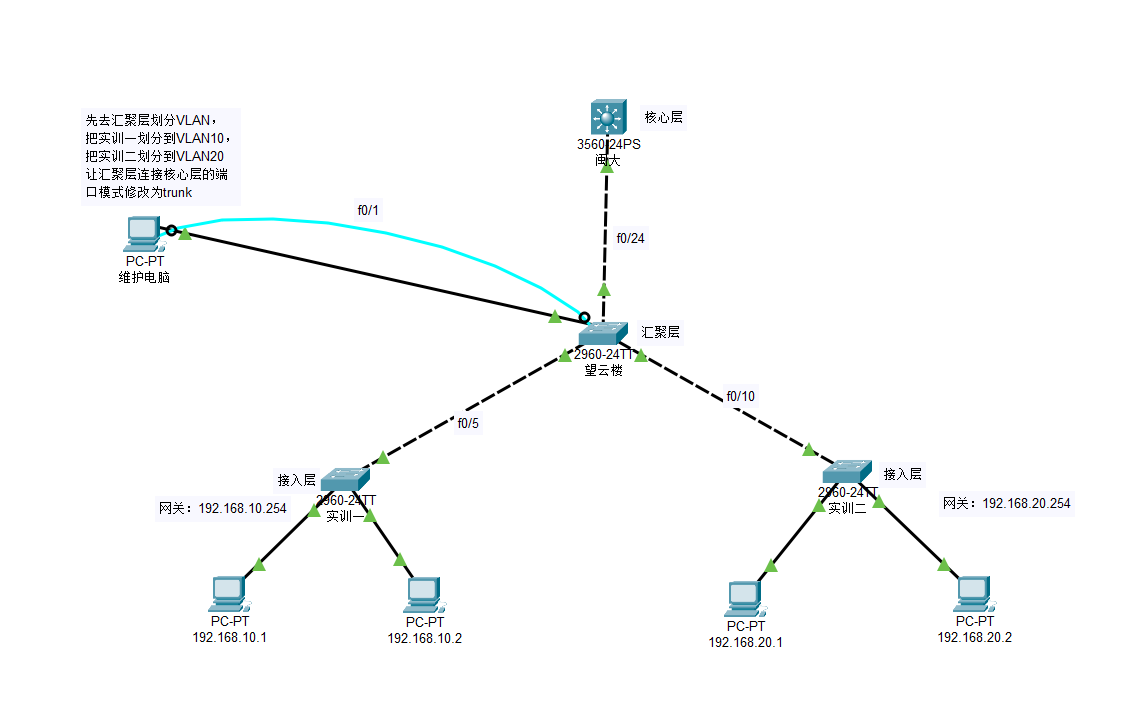
三层交换机SVI功能(交换机虚拟接口)实现各个实训室电脑网络可互通,原本是独立局域网
三层交换机 SVI功能(交换机虚拟接口) 实现VLAN路由 需求 :各实训室使用独立局域网,即每个实训有自己的IP网段, 每个实训室只有内部互相访问。 需求:为了加强各实训室学生的交流,学校要求我们…...

class的访问器成员
class的访问器成员 本质是 class 的语法糖 等价于对象的defineProperty对象里面也能使用 class Product{constructor(count, price){this.count count;this.price price;}get total(){ // 相当于getterreturn this.count * this.price;}}const product new Product(10, 10…...
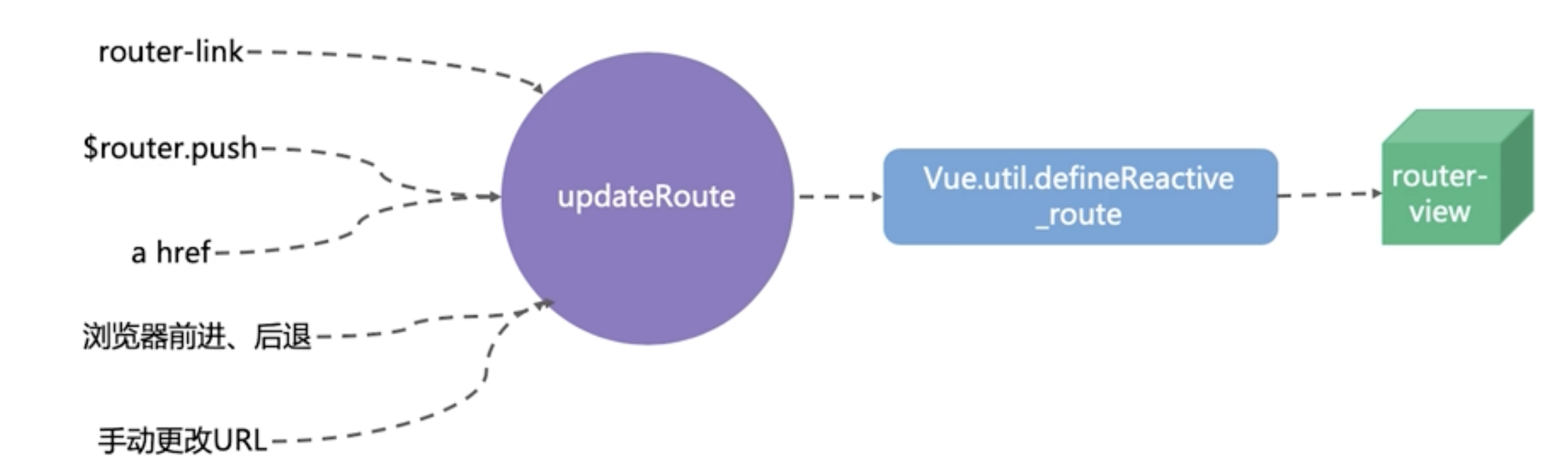
vue入门:路由 router
文章目录 介绍安装配置路由模式嵌套路由路由传参编程式导航路由懒加载 底层原理 介绍 vue2 vue router API vue3 vue router API Vue Router 是 Vue.js 的官方路由管理器,它允许你通过不同的 URL 显示不同的组件,从而实现单页面应用(SPA&a…...
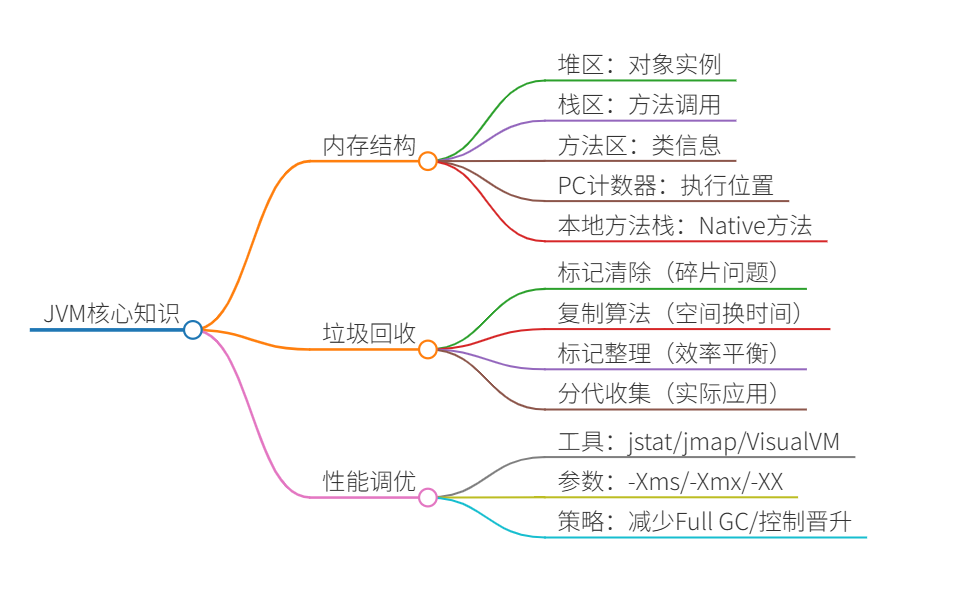
JVM详解(曼波脑图版)
(✪ω✪)ノ 好哒!曼波会用最可爱的比喻给小白同学讲解JVM,准备好开启奇妙旅程了吗?(๑˃̵ᴗ˂̵)و 📌 思维导图 ━━━━━━━━━━━━━━━━━━━ 🍎 JVM是什么?(苹果式比…...

Prometheus thanos架构
Thanos 是一个用于扩展 Prometheus 的高可用性和长期存储的解决方案。它通过整合多个 Prometheus 实例,提供了全局查询、长期存储、以及高可用性的能力。Thanos 的架构主要由以下几个核心组件组成: 1. Sidecar 功能: Sidecar 是与每个 Prom…...
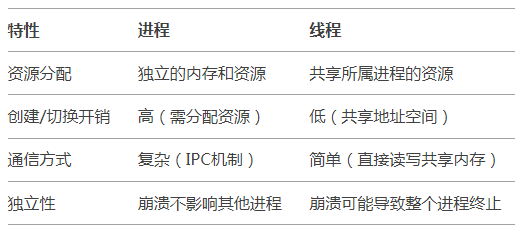
进程(Process)和进程管理
李升伟 整理 进程和进程管理是操作系统的核心概念之一,涉及计算机资源的分配、调度和执行控制。以下是详细的解释: 1. 进程的定义 进程(Process)是正在执行的程序实例,是操作系统进行资源分配和调度的基本单位。它包…...

更强的视觉 AI!更智能的多模态助手!Qwen2.5-VL-32B-Instruct-AWQ 来袭
Qwen2.5-VL-32B-Instruct 是阿里巴巴通义千问团队于 2025 年 3 月 24 日开源的多模态大模型,基于 Apache 2.0 协议发布。该模型在 Qwen2.5-VL 系列的基础上,通过强化学习技术优化,以 32B 参数规模实现了多模态能力的突破。 核心特性升级&…...

Linux系统中的Perf总结
Linux系统中的Perf总结 Perf 是一个集成在 Linux 内核中的强大性能分析工具,在 Ubuntu 系统上尤为实用。它可以帮助用户监控和分析 CPU、内存、I/O 等性能指标。本文将一步步详解 Perf 在 Ubuntu 系统中的安装、使用方法及进阶技巧,带你从入门走向精通。…...
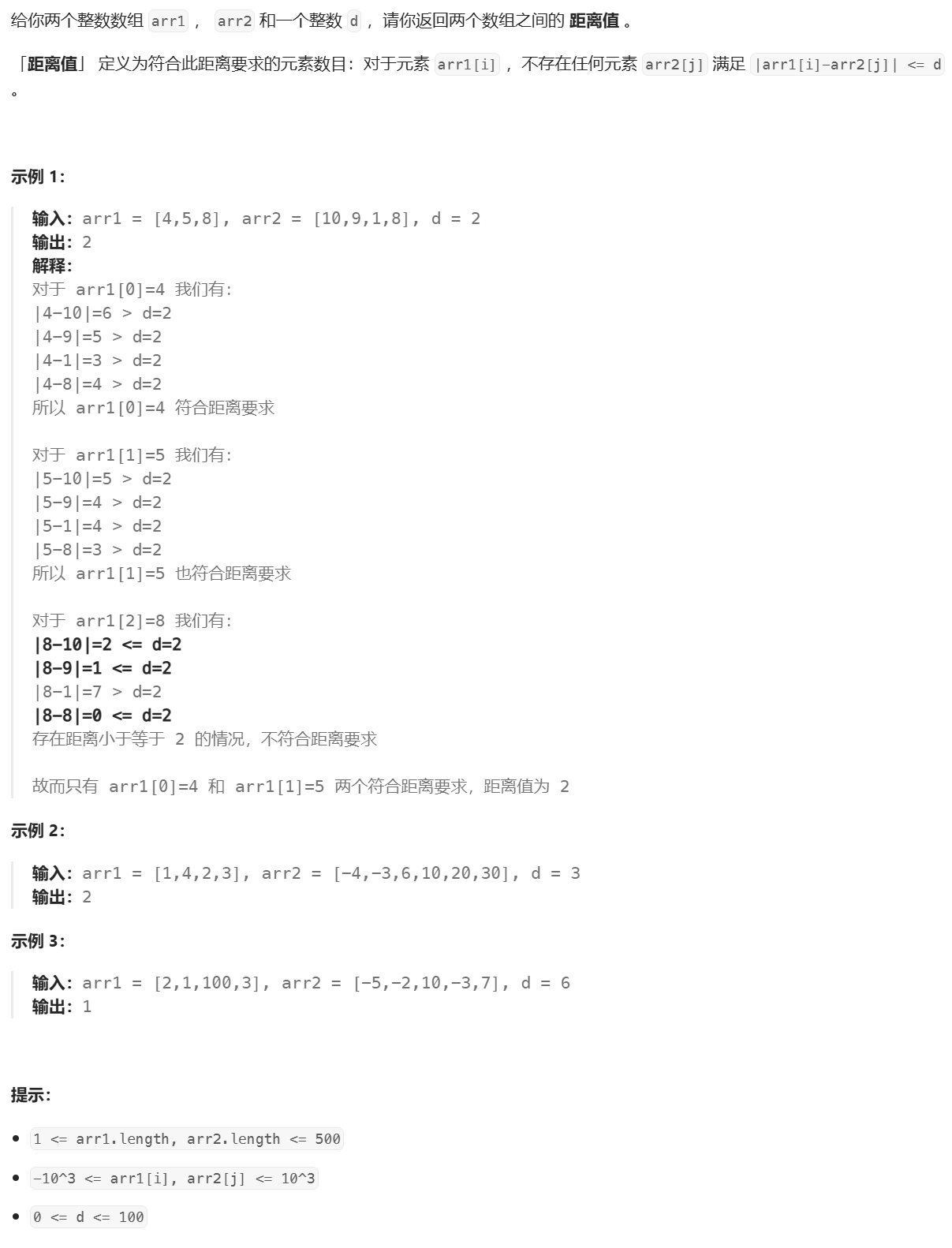
每日算法-250417
每日算法 - 20250417 记录今天的算法学习过程,包含三道 LeetCode 题目。 1005. K 次取反后最大化的数组和 题目 思路 贪心 解题过程 想要获得最大的数组和,我们的目标是尽可能地增大数组元素的总和。一种有效的贪心策略是:每次选择数组中绝…...
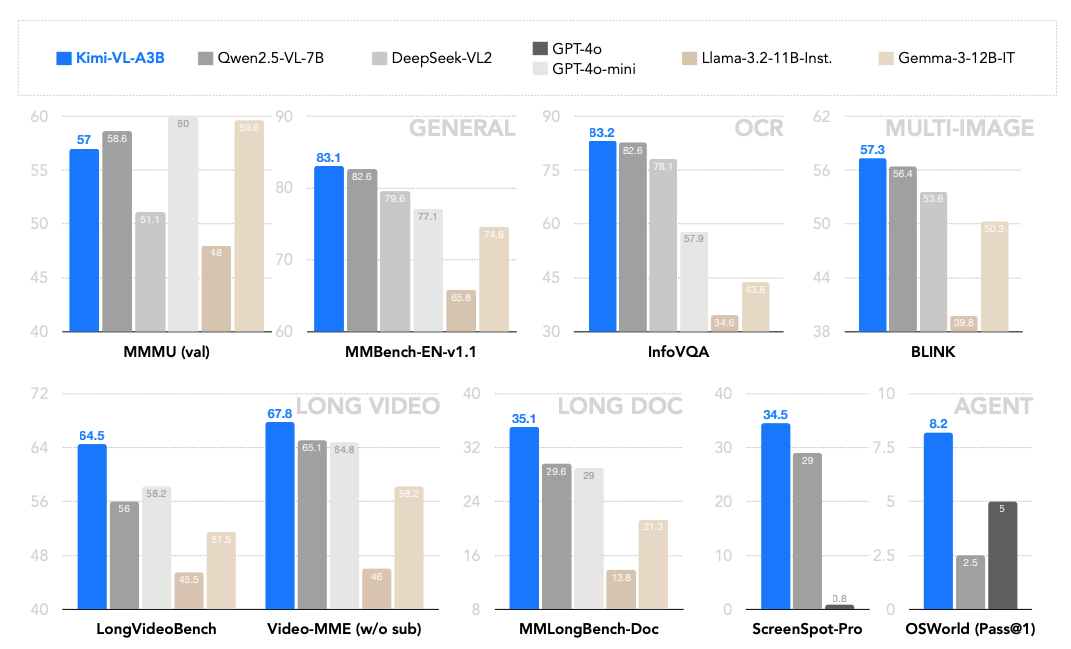
16.4B参数仅激活2.8B!Kimi-VL-A3B开源:长文本、多模态、低成本的AI全能选手
近日,月之暗面(Moonshot AI)开源了Kimi-VL系列模型,包含Kimi-VL-A3B-Instruct(指令调优版)和Kimi-VL-A3B-Thinking(推理增强版)。这两款模型以总参数16.4B、激活参数仅2.8B的轻量化设…...
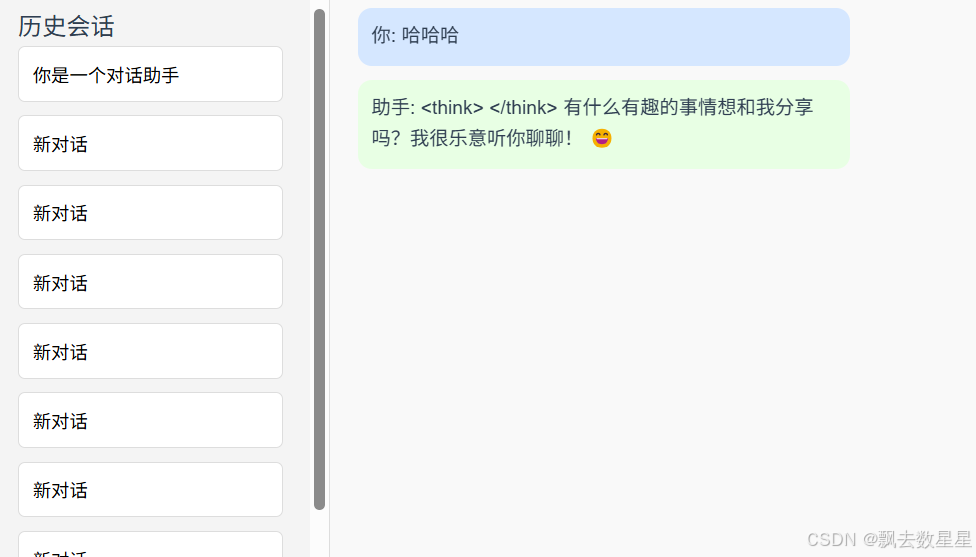
山东大学软件学院创新项目实训开发日志(17)之中医知识历史问答历史对话查看功能完善
本次完善了历史对话的查看功能,可以让其正常显示标题 后端:在conversationDTO功能构造方法添加title 前端:在历时会话按钮添加标题title即可 前端效果展示,成功(^-^)V:...

关于Java集合中对象字段的不同排序实现方式
📊 关于Java集合中对象字段的不同排序实现方式 #Java集合 #排序算法 #Comparator #性能优化 一、排序基础:两种核心方式对比 方式Comparable接口Comparator接口实现位置目标类内部实现独立类或匿名内部类排序逻辑自然排序(固定规则…...

ZKmall开源商城静态资源管理:Nginx 配置与优化
ZKmall开源商城作为电商平台,其商品图片、前端资源等静态内容的高效管理与分发直接影响用户体验和系统性能。基于Nginx的静态资源管理方案,结合动静分离、缓存优化、安全加固、性能调优四大核心策略,可显著提升平台响应速度与稳定性。以下是具…...

Google Gemini 系列AI模型 的详细解析,涵盖其技术特点、版本差异、应用场景及优势
以下是 Google Gemini 系列AI模型 的详细解析,涵盖其技术特点、版本差异、应用场景及优势: 1. Gemini 系列概述 发布背景: Google于2023年推出 Gemini 系列模型,作为其多模态大模型的里程碑,旨在结合文本、图像、音频…...

量子通信应用:量子安全物联网(三)协议融合
第一部分:引言与概述 1.1 量子安全物联网的背景与必要性 随着物联网(IoT)设备的爆炸式增长(预计2030年全球连接设备超750亿台),传统安全机制(如RSA、ECC加密)正面临量子计算的颠覆性威胁。量子计算机的Shor算法可在多项式时间内破解非对称加密体系,而Grover算法则对…...

鸿蒙API15 “一多开发”适配:解锁黄金三角法则,开启高效开发新旅程
一、引言 在万物互联的时代浪潮中,鸿蒙操作系统以其独特的 “一多开发” 理念,为开发者打开了一扇通往全场景应用开发的新大门。“一多开发”,即一次开发,多端部署 ,旨在让开发者通过一套代码工程,就能高效…...

量子计算:开启未来科技之门的钥匙
在当今科技飞速发展的时代,量子计算正逐渐从实验室走向实际应用,成为全球科技领域的焦点之一。它有望为众多行业带来前所未有的变革,从密码学、药物研发到金融风险评估等,量子计算的潜力不可限量。 一、量子计算的原理 量子计算基…...
)
k230学习笔记-疑难点(1)
1.出现boot failed with exit code 19: 需要将k230开发板的btoot0拨到ON 2.出现boot failed with exit code 13: 说明k230开发板的固件烧录已经丢失,需要重新烧录 *** 注意重新烧录时需要将btoot0重新拨到OFF,才会弹出加载固件需要的通用串行总线&…...
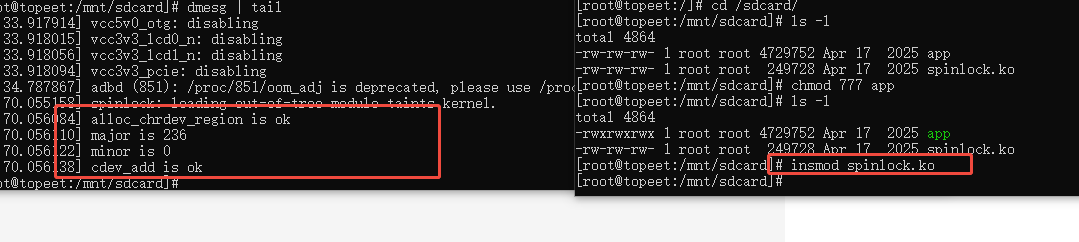
驱动-自旋锁
前面原子操作进行了讲解, 并使用原子整形操作对并发与竞争实验进行了改进,但是原子操作只能对整形变量或者位进行保护, 而对于结构体或者其他类型的共享资源, 原子操作就力不从心了, 这时候就轮到自旋锁的出场了。 两个…...
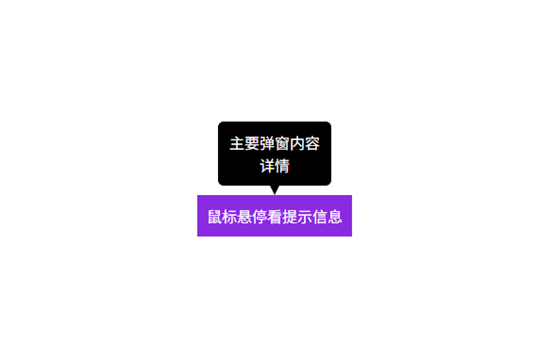
10.(vue3.x+vite)div实现tooltip功能(css实现)
1:效果截图 2:代码实现 <template><div><div class="tooltip" style="margin-top: 20%; margin-left: 20%; background-color: blueviolet; color: white;...

使WebSocket 稳定可靠,需要考虑的方向
文章目录 1. 连接管理2. 心跳检测3. 重连机制4. 消息队列5. 错误处理6. 资源管理7. 安全性8. 状态同步 示例代码1. 添加依赖2. WebSocket 客户端实现代码注释功能标注3. 安卓端使用MainActivity.java布局文件(activity_main.xml) 4. 后端(Fla…...
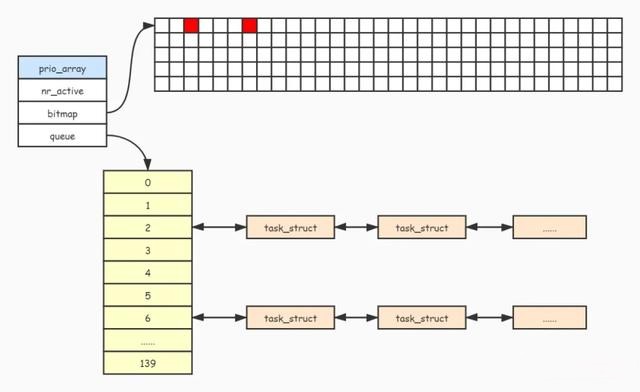
Linux:进程:进程调度
进程在CPU上运行具有以下特性: 竞争、独⽴、并⾏、并发 竞争性:系统进程数⽬众多,⽽CPU资源很少甚至只有一个,所以进程之间是具有竞争属性的。为 了⾼效完成任务,更合理竞争相关资源,便具有了优先级 独⽴性: 为了避…...