目标检测中的损失函数(二) | BIoU RIoU α-IoU
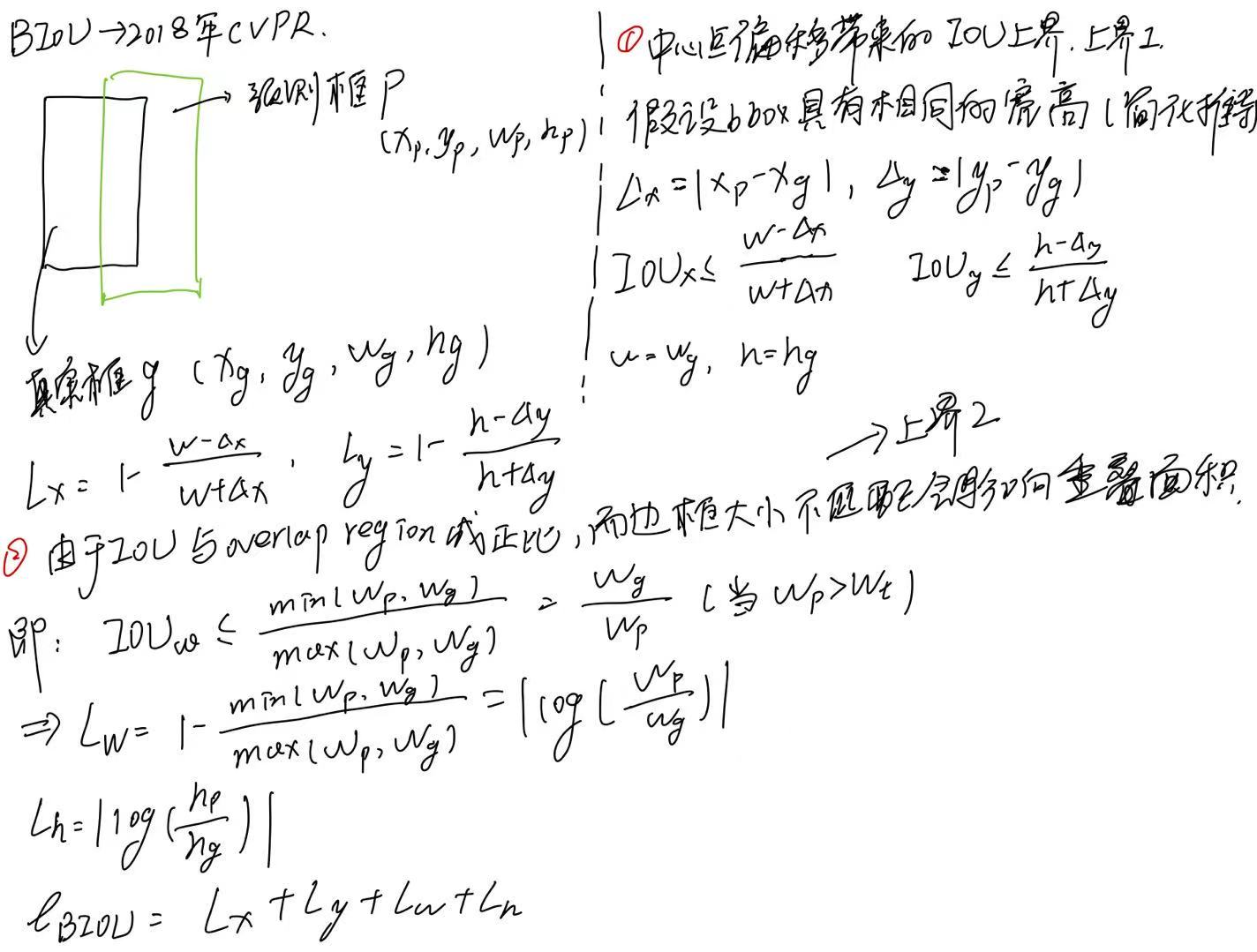
BIoU来自发表在2018年CVPR上的文章:《Improving Object Localization With Fitness NMS and Bounded IoU Loss》
论文针对现有目标检测方法只关注“足够好”的定位,而非“最优”的框,提出了一种考虑定位质量的NMS策略和BIoU loss。
这里不赘述NMS,只看loss相关的内容。
IoU 是检测性能的主要指标,但直接优化 IoU 很难(不可导、不光滑),因此通常使用 L1/L2 或 SmoothL1 损失,但它们并不直接优化 IoU。 Bounded IoU Loss(BIoU) 通过对 IoU 上界建模,最大化ROI(Region of Interest)和相关的ground truth边界框之间的IoU重叠,使得损失与 IoU 更紧密对应,又具备良好的优化特性。
公式:
 代码来自MMDetection的实现:
代码来自MMDetection的实现:
def bounded_iou_loss(pred: Tensor,target: Tensor,beta: float = 0.2,eps: float = 1e-3) -> Tensor:"""BIoULoss.This is an implementation of paper`Improving Object Localization with Fitness NMS and Bounded IoU Loss.<https://arxiv.org/abs/1711.00164>`_.Args:pred (Tensor): Predicted bboxes of format (x1, y1, x2, y2),shape (n, 4).target (Tensor): Corresponding gt bboxes, shape (n, 4).beta (float, optional): Beta parameter in smoothl1.eps (float, optional): Epsilon to avoid NaN values.Return:Tensor: Loss tensor."""pred_ctrx = (pred[:, 0] + pred[:, 2]) * 0.5pred_ctry = (pred[:, 1] + pred[:, 3]) * 0.5pred_w = pred[:, 2] - pred[:, 0]pred_h = pred[:, 3] - pred[:, 1]with torch.no_grad():target_ctrx = (target[:, 0] + target[:, 2]) * 0.5target_ctry = (target[:, 1] + target[:, 3]) * 0.5target_w = target[:, 2] - target[:, 0]target_h = target[:, 3] - target[:, 1]dx = target_ctrx - pred_ctrxdy = target_ctry - pred_ctry# 这里的 “×2” 来自中心差异在边界框两侧的对称影响loss_dx = 1 - torch.max((target_w - 2 * dx.abs()) /(target_w + 2 * dx.abs() + eps), torch.zeros_like(dx))loss_dy = 1 - torch.max((target_h - 2 * dy.abs()) /(target_h + 2 * dy.abs() + eps), torch.zeros_like(dy))loss_dw = 1 - torch.min(target_w / (pred_w + eps), pred_w /(target_w + eps))loss_dh = 1 - torch.min(target_h / (pred_h + eps), pred_h /(target_h + eps))# view(..., -1) does not work for empty tensorloss_comb = torch.stack([loss_dx, loss_dy, loss_dw, loss_dh],dim=-1).flatten(1)loss = torch.where(loss_comb < beta, 0.5 * loss_comb * loss_comb / beta,loss_comb - 0.5 * beta)return loss# 辅助说明BIoU Loss
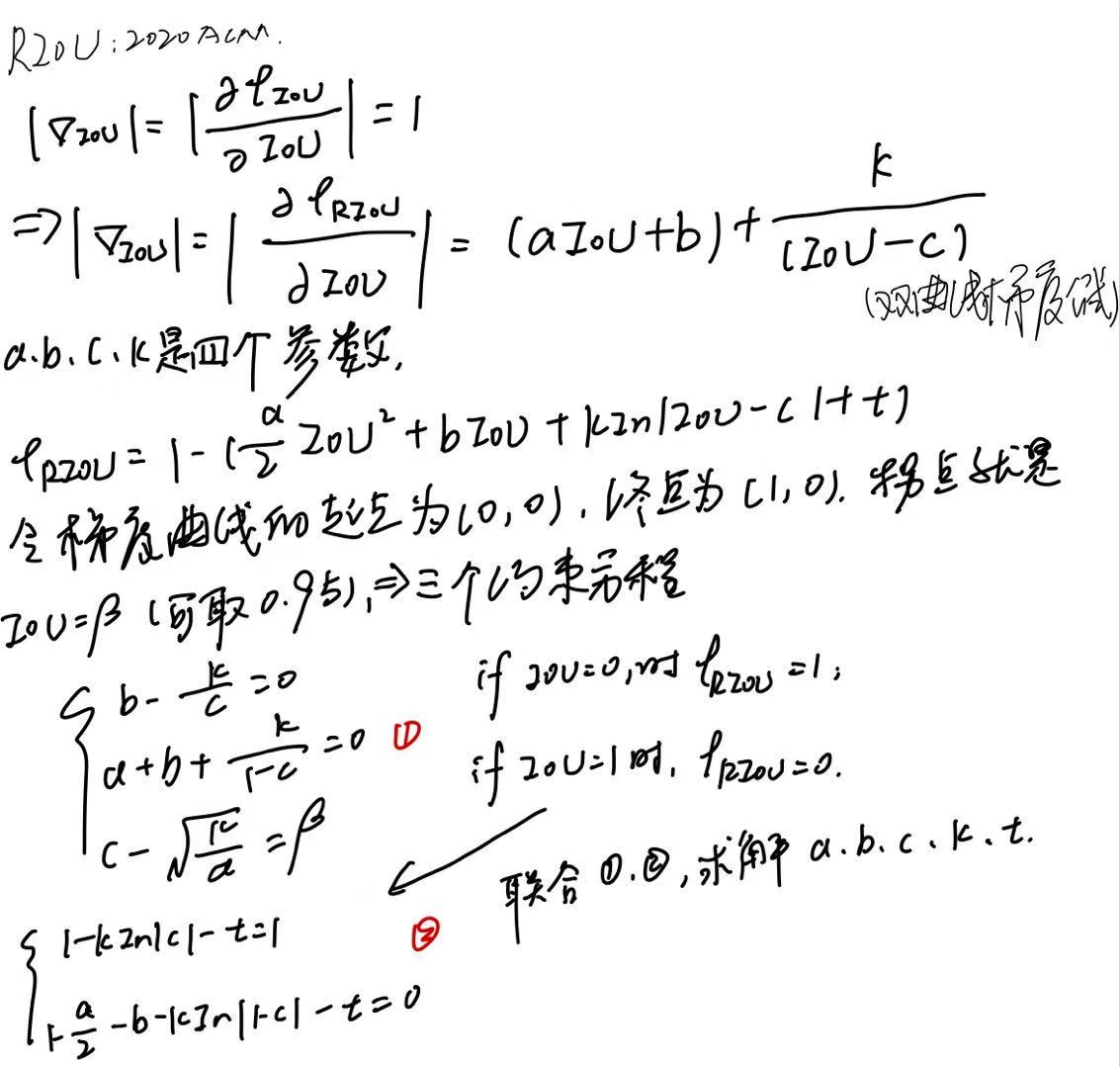
def smooth_l1_loss(pred: Tensor, target: Tensor, beta: float = 1.0) -> Tensor:"""Smooth L1 loss.Args:pred (Tensor): The prediction.target (Tensor): The learning target of the prediction.beta (float, optional): The threshold in the piecewise function.Defaults to 1.0.Returns:Tensor: Calculated loss"""assert beta > 0if target.numel() == 0:return pred.sum() * 0assert pred.size() == target.size()diff = torch.abs(pred - target)loss = torch.where(diff < beta, 0.5 * diff * diff / beta,diff - 0.5 * beta)return lossRIoU来自发表在2020年ACM上的文章:《Single-Shot Two-Pronged Detector with Rectified IoU Loss》
论文提出了一种基于IoU的自适应定位损失,称为Rectified IoU(RIoU)损失,用于校正各种样本的梯度。校正后的IoU损失增加了高IoU样本的梯度,抑制了低IoU样本的梯度,提高了模型的整体定位精度。
用于解决单阶段目标检测中样本不平衡带来的梯度偏差问题!
但是如果随着IoU的增加而增加局部损失梯度的权重,那么将面临另一个问题,即当回归是完美的(IoU)时,梯度将继续增加→ 1, 这意味着当两个bbox完全重叠(IoU=1)时,将得到最大梯度,这是非常不合理的。
公式:
实现:
import torch
import torch.nn as nndef riou_loss(iou: torch.Tensor,loss_base: torch.Tensor,alpha: float = 2.0,gamma: float = 2.0,threshold: float = 0.5) -> torch.Tensor:"""Rectified IoU Loss (RIoU) implementation.Args:iou (Tensor): IoU between predicted and target boxes (shape: [N])loss_base (Tensor): Original IoU-based loss value (e.g., GIoU loss) (shape: [N])alpha (float): Scaling factor for high IoU samplesgamma (float): Focusing parameter (similar to focal loss)threshold (float): IoU threshold to apply amplificationReturns:Tensor: Rectified IoU loss (shape: [N])"""# Weight function: amplify high-quality samplesweight = torch.where(iou >= threshold,alpha * (iou ** gamma),iou)# Final loss: element-wise weightedloss = weight * loss_basereturn loss.mean()
α-IoU来自发表在2021年NeurlPS上的文章:《Alpha-IoU: A Family of Power Intersection over Union Losses for Bounding Box Regression》
边界框回归的核心任务是学习框的预测与真实框之间的匹配程度,IoU是最常见的评价指标。然而现有 IoU 损失(如 GIoU、DIoU、CIoU)虽然考虑了位置和重叠,但它们在优化目标、梯度平滑性或收敛速度上仍有局限。该工作出现的时候已经存在EIoU和Focal-EIoU了。
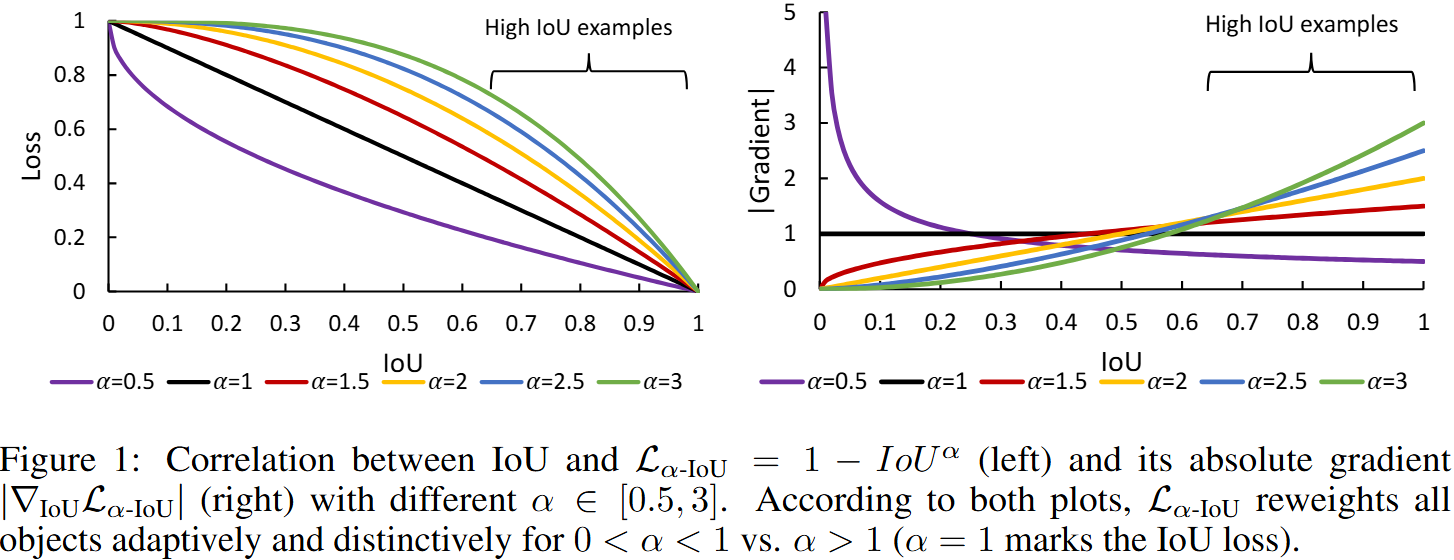
α-IoU通过一个参数 α 实现灵活控制误差加权,从而提升目标检测精度,并为小数据集和噪声框提供更多鲁棒性。
该论文使用Box-Cox变换将IoU loss变换到α-IoU loss,这是一种统计技术,用于将非正态分布的数据转换为更接近正态分布的形式。该方法由George Box和David Cox在1964年提出,广泛应用于数据预处理步骤中,特别是在需要满足正态性假设的统计分析或机器学习模型构建过程中。
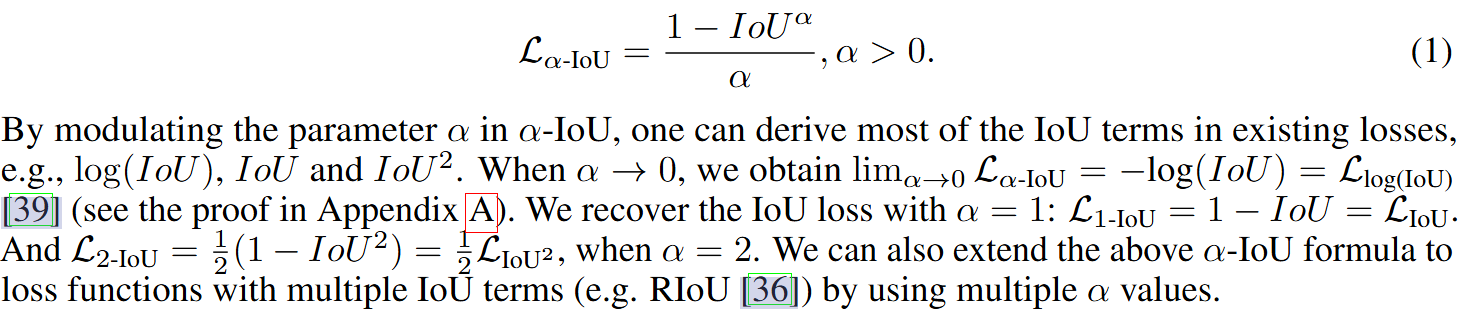
然后推广到GIoU、DIoU和CIoU上,也就是在之前的公式惩罚项上加入α,详细地推导与说明请参考该论文:
 α 对不同的模型或数据集不太敏感,在大多数情况下 α = 3 始终表现良好。α-IoU 损失族可以很容易地应用于在干净和嘈杂的 bbox 设置下改进最先进的检测器,而无需向这些模型引入额外的参数(对训练算法进行任何修改),也不增加它们的训练/推理时间。
α 对不同的模型或数据集不太敏感,在大多数情况下 α = 3 始终表现良好。α-IoU 损失族可以很容易地应用于在干净和嘈杂的 bbox 设置下改进最先进的检测器,而无需向这些模型引入额外的参数(对训练算法进行任何修改),也不增加它们的训练/推理时间。
但是应用到自定义数据集上效果如何还是需要结合具体问题具体分析 !
def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):# Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4box2 = box2.T# Get the coordinates of bounding boxesif x1y1x2y2: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]else: # transform from xywh to xyxyb1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2# Intersection areainter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)# Union Areaw1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + epsunion = w1 * h1 + w2 * h2 - inter + eps# change iou into pow(iou+eps)# iou = inter / unioniou = torch.pow(inter/union + eps, alpha)# beta = 2 * alphaif GIoU or DIoU or CIoU:cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) widthch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex heightif CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonalrho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distanceif DIoU:return iou - rho2 / c2 # DIoUelif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)with torch.no_grad():alpha_ciou = v / ((1 + eps) - inter / union + v)# return iou - (rho2 / c2 + v * alpha_ciou) # CIoUreturn iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelse: # GIoU https://arxiv.org/pdf/1902.09630.pdf# c_area = cw * ch + eps # convex area# return iou - (c_area - union) / c_area # GIoUc_area = torch.max(cw * ch + eps, union) # convex areareturn iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoUelse:return iou # torch.log(iou+eps) or iou相关文章:
目标检测中的损失函数(二) | BIoU RIoU α-IoU
BIoU来自发表在2018年CVPR上的文章:《Improving Object Localization With Fitness NMS and Bounded IoU Loss》 论文针对现有目标检测方法只关注“足够好”的定位,而非“最优”的框,提出了一种考虑定位质量的NMS策略和BIoU loss。 这里不赘…...
 - 什么是MCP)
SpringAI系列 - MCP篇(一) - 什么是MCP
目录 一、引言二、MCP核心架构三、MCP传输层(stdio / sse)四、MCP能力协商机制(Capability Negotiation)五、MCP Client相关能力(Roots / Sampling)六、MCP Server相关能力(Prompts / Resources / Tools)一、引言 之前我们在接入大模型时,不同的大模型通常都有自己的…...
Linux 入门十一:Linux 网络编程
一、概述 1. 网络编程基础 网络编程是通过网络应用编程接口(API)编写程序,实现不同主机上进程间的信息交互。它解决的核心问题是:如何让不同主机上的程序进行通信。 2. 网络模型:从 OSI 到 TCP/IP OSI 七层模型&…...

沐渥氮气柜控制板温湿度氧含量氮气流量四显智控系统
氮气柜控制板通常用于实时监控和调节柜内环境参数,确保存储物品如电子元件、精密仪器、化学品等,处于低氧、干燥的稳定状态。以下是沐渥氮气柜控制板核心参数的详细介绍及控制逻辑: 一、控制板核心参数显示模块 1)温度显示&am…...

vue3 主题模式 结合 element-plus的主题
vue3 主题模式 结合 element-plus的主题 npm i element-plus --save-dev在 Vue 3 中,实现主题模式主要有以下几种方式 1.使用 CSS 变量(自定义属性) CSS 变量是一种在 CSS 中定义可重用值的方式。在主题模式中,可以将颜色、字体…...
)
Redis 有序集合(Sorted Set)
Redis 有序集合(Sorted Set) 以下从基础命令、内部编码和使用场景三个维度对 Redis 有序集合进行详细解析: 一、基础命令 命令时间复杂度命令含义zadd key score member [score member …] O ( k l o g ( n ) ) O(klog(n)) O(klog(n))&…...

[c语言日寄]免费文档生成器——Doxygen在c语言程序中的使用
【作者主页】siy2333 【专栏介绍】⌈c语言日寄⌋:这是一个专注于C语言刷题的专栏,精选题目,搭配详细题解、拓展算法。从基础语法到复杂算法,题目涉及的知识点全面覆盖,助力你系统提升。无论你是初学者,还是…...
QtCreator的设计器、预览功能能看到程序图标,编译运行后图标消失
重新更换虚拟机(Vmware Kylin),重新编译和配置了很多第三方库后,将代码跑到新的这个虚拟机环境中,但是出现程序图标不可见,占位也消失,后来继续检查ui文件,ui文件图标也异常&#x…...

QT文件和文件夹拷贝操作
1.拷贝文件夹 //(源文件目录路劲,目的文件目录,文件存在是否覆盖) bool copyDirectory(const QString& srcPath, const QString& dstPath, bool coverFileIfExist) { QDir srcDir(srcPath); QDir dstDir(dstPath); if (!dstDir.exi…...
面试常用基础算法
目录 快速排序归并排序堆排序 n n n皇后问题最大和子数组爬楼梯中心扩展法求最长回文子序列分割回文串动态规划求最长回文子序列最长回文子串单调栈双指针算法修改 分割回文串滑动窗口栈 快速排序 #include <iostream> #include <algorithm>using namespace std;…...

Python-24:小R的随机播放顺序
问题描述 小R有一个特殊的随机播放规则。他首先播放歌单中的第一首歌,播放后将其从歌单中移除。如果歌单中还有歌曲,则会将当前第一首歌移到最后一首。这个过程会一直重复,直到歌单中没有任何歌曲。 例如,给定歌单 [5, 3, 2, 1,…...

悬空引用和之道、之禅-《分析模式》漫谈57
DDD领域驱动设计批评文集 做强化自测题获得“软件方法建模师”称号 《软件方法》各章合集 “Analysis Patterns”的第5章“对象引用”原文: Unless you can catch all such references, there is the risk of a dangling reference, which often has painful con…...

Python accumulate 函数详解
https://docs.python.org/zh-cn/3/library/itertools.html#itertools.accumulate 在 Python 中,accumulate 是一个生成器(generator), 是来自 itertools 模块的一个函数。 它的作用是返回一个迭代器,该迭代器生成输入数据的累积结…...

Cursor可视化大屏搭建__0420
主题:用Cursor怎么进行数据洞察,做AI预测化内容。 Python基础语法与AI python生态强大,代码简洁,相对其他语言Python更好上手,浙江高考将Python列为可选科目 科学计算:Sklearn,Numpy,Pandas 人工智能:Tensorflow,Pytorch 网络爬虫:Scrapy…...
【初阶数据结构】树——二叉树(上)
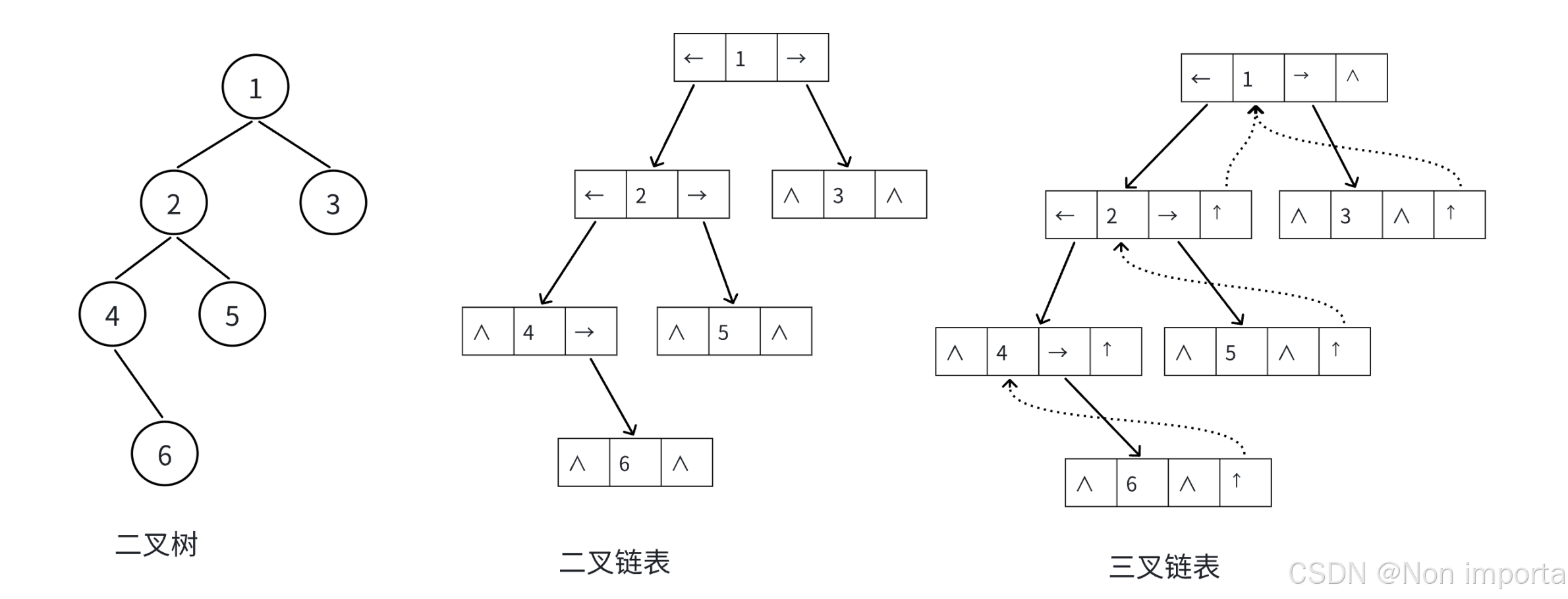
文章目录 目录 前言 一、树 1.树的概念与结构 2.树相关术语 3.树的表示 二、二叉树 1.概念与结构 2.特殊的二叉树 3.二叉树存储结构 总结 前言 本篇带大家学习一种非线性数据结构——树,简单认识树和二叉数以及了解二叉树的存储结构。 一、树 1.树的概念与结构 树…...
ECharts散点图-散点图14,附视频讲解与代码下载
引言: ECharts散点图是一种常见的数据可视化图表类型,它通过在二维坐标系或其它坐标系中绘制散乱的点来展示数据之间的关系。本文将详细介绍如何使用ECharts库实现一个散点图,包括图表效果预览、视频讲解及代码下载,让你轻松掌握…...

C++中的算术转换、其他隐式类型转换和显示转换详解
C中的类型转换(Type Conversion)是指将一个数据类型的值转换为另一个数据类型的过程,主要包括: 一、算术类型转换(Arithmetic Conversions) 算术类型转换通常发生在算术运算或比较中,称为**“标…...
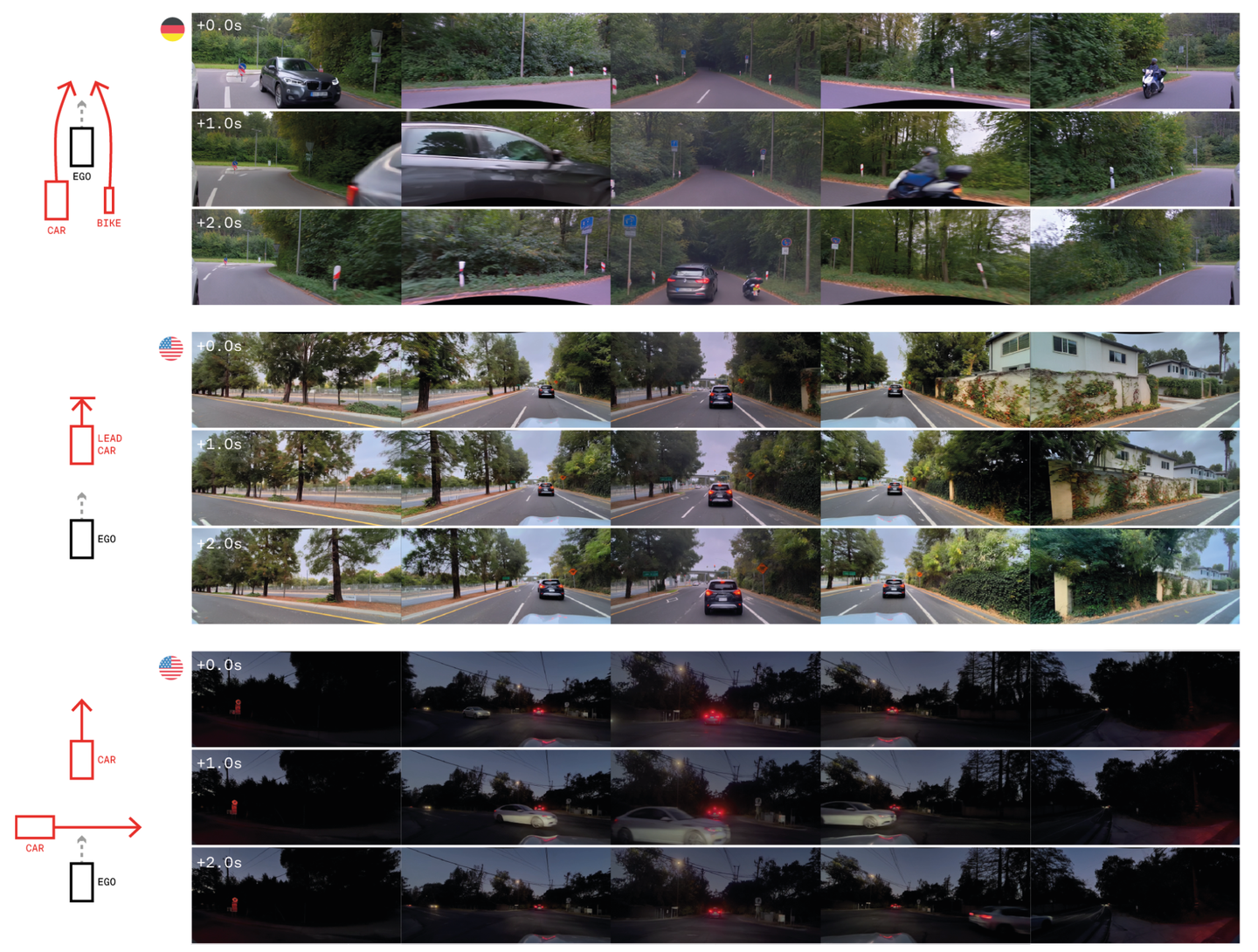
GAIA-2:用于自动驾驶的可控多视图生成世界模型
25年3月来自英国创业公司 Wayze 的论文“GAIA-2: A Controllable Multi-View Generative World Model for Autonomous Driving”。(注:23年9月其发布GAIA-1) 生成模型为模拟复杂环境提供一种可扩展且灵活的范例,但目前的方法不足…...
CMake / MsBuild Ninja Make/ MSVC g++ clang++ 等c++编译概念解释)
(一)CMake / MsBuild Ninja Make/ MSVC g++ clang++ 等c++编译概念解释
c 几个编译概念 一 概念二 层级关系总结2.1层级表格2.2 关键点说明2.3 示例流程(以 Ninja 为例)2.4 示例流程(Windows 平台) 三 总结 一 概念 CMake 通过 CMakeLists.txt 生成不同平台的构建文件(如 .sln、build.n…...

创建 Node.js Playwright 项目:从零开始搭建自动化测试环境
一、环境准备 在开始创建 Playwright 项目之前,确保你的电脑上已经安装了以下工具: Node.js:Playwright 依赖于 Node.js 环境,确保你已经安装了最新版本的 Node.js。可以通过以下命令检查是否安装成功: node -v npm -…...
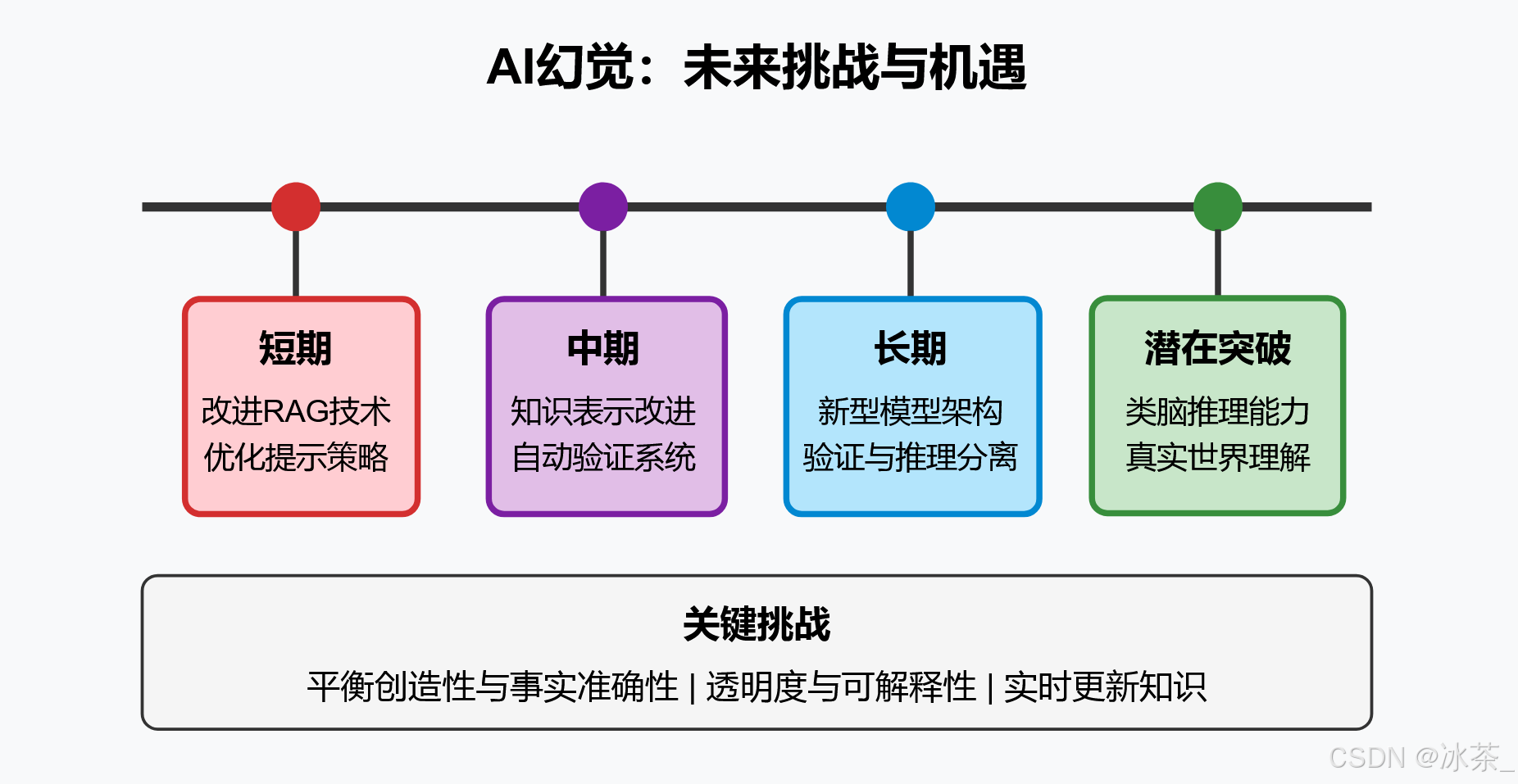
浅谈AI致幻
文章目录 当前形势下存在的AI幻觉(AI致幻)什么是AI幻觉AI幻觉的类型为什么AI会产生幻觉AI幻觉的危害与影响当前应对AI幻觉的技术与方法行业与学术界的最新进展未来挑战与展望结论 当前形势下存在的AI幻觉(AI致幻) 什么是AI幻觉 …...

postman乘法计算,变量赋值
postman脚本怎么计算乘法 在Postman中,你可以通过多种方式计算乘法,这取决于你的具体需求。例如,如果你想在发送请求前计算乘法结果,或者在测试标签中计算响应数据的乘法,下面是一些常见的方法。 1. 使用JavaScript代…...

自定义错误码的必要性
为什么要使用错误码,直接返回一个错误信息不好么? 下面介绍一下,在程序开发中使用错误码的必要性~ 便于排查问题 想象你开了一家奶茶店,顾客下单后可能出现各种问题: 没珍珠了(错误码:50…...

车载软件架构 --- 二级boot设计说明需求规范
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 周末洗了一个澡,换了一身衣服,出了门却不知道去哪儿,不知道去找谁,漫无目的走着,大概这就是成年人最深的孤独吧! 旧人不知我近况,新人不知我过…...

管理杂谈——采石矶大捷的传奇与启示
南宋抗金史上,岳飞与岳家军的铁血传奇家喻户晓,但另一位力挽狂澜的“文官战神”却常被忽视——他从未掌兵,却在南宋存亡之际整合溃军,以少胜多,缔造采石矶大捷。此人正是虞允文。一介书生何以扭转乾坤?他的…...
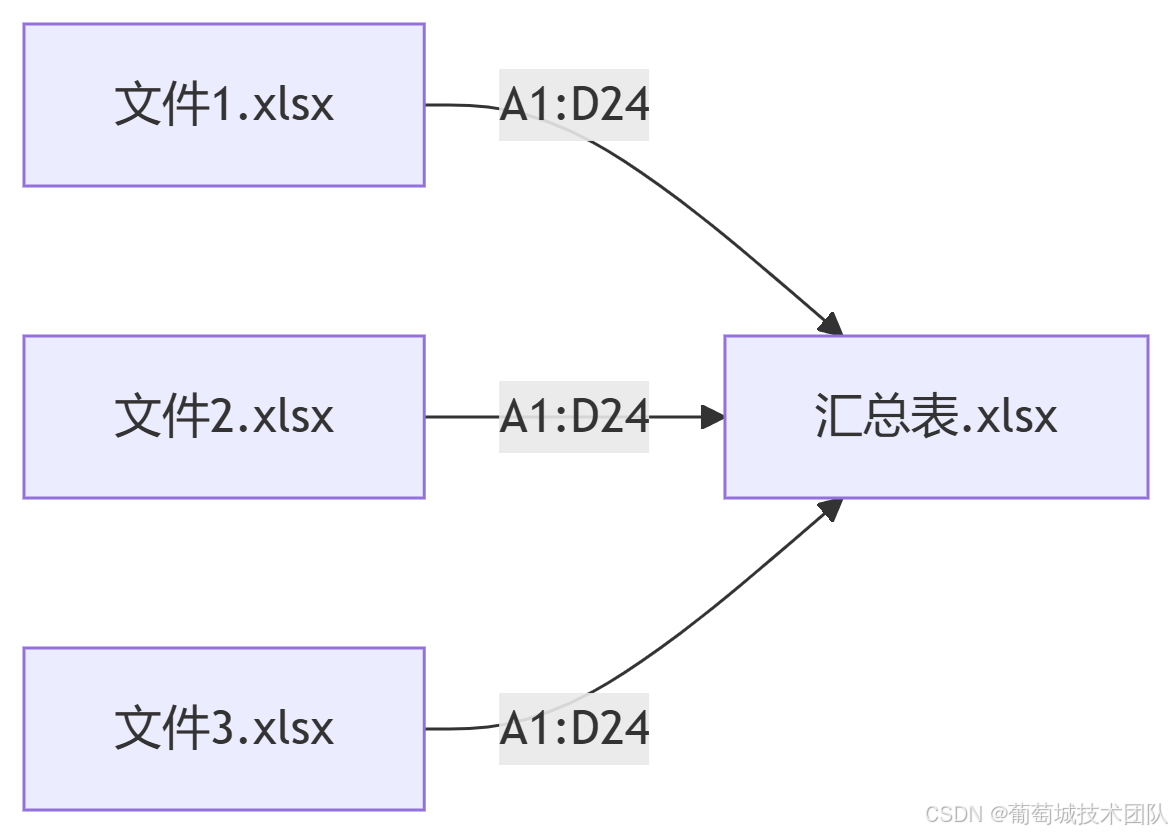
Java高效合并Excel报表实战:GcExcel让数据处理更简单
前言:为什么需要自动化合并Excel? 在日常办公场景中,Excel报表合并是数据分析的基础操作。根据2023年企业办公效率报告显示: 财务人员平均每周花费6.2小时在Excel合并操作上人工合并的错误率高达15%90%的中大型企业已采用自动化…...
第十四届蓝桥杯 2023 C/C++组 平方差
目录 题目: 题目描述: 题目链接: 思路: 核心思路: 第一种思路: 第二种思路: 坑点: 代码: 数学找规律 O(n) 50分代码详解: O(1)满分代码详解&#x…...

前端路由缓存实现
vue3缓存实现完整版,查看这篇设计和实现方式吧,更完整...
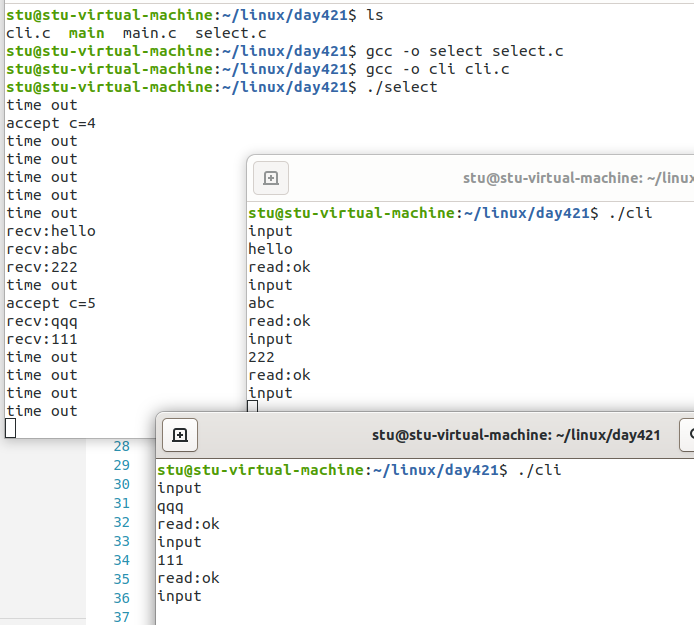
I/O复用函数的使用——select
I/O复用函数的使用——select 目录 一、概念 二、select接口 2.1 基础概念 2.2 使用 select 函数的标准输入读取代码 2.3 基于 select 模型的多客户端 TCP 服务器实现 一、概念 i/o复用使得程序能同时监听多个文件描述符,可以提高程序性能。 之前为了让服务器能…...

ubuntu20.04安装安装x11vnc服务基于gdm3或lightdm这两种主流的显示管理器。
前言:在服务端安装vnc服务,可以方便的远程操作服务器,而不用非要插上显示器才行。所以在服务器上安装vnc是很重要的。在ubuntu20中,默认的显示管理器已经变为gdm3,它可以带来与 GNOME 无缝衔接的体验,强调功…...