鸿蒙NEXT开发LRUCache缓存工具类(单例模式)(ArkTs)
import { util } from '@kit.ArkTS';/*** LRUCache缓存工具类(单例模式)* @author 鸿蒙布道师* @since 2025/04/21*/
export class LRUCacheUtil {private static instance: LRUCacheUtil;private lruCache: util.LRUCache<string, any>;/*** 私有构造函数,防止外部实例化*/private constructor() {this.lruCache = new util.LRUCache(64); // 默认容量为64}/*** 获取LRUCacheUtil的单例* @returns LRUCacheUtil 单例对象*/public static getInstance(): LRUCacheUtil {if (!LRUCacheUtil.instance) {LRUCacheUtil.instance = new LRUCacheUtil();}return LRUCacheUtil.instance;}/*** 判断是否包含指定key的缓存* @param key 缓存键* @returns 是否存在该key*/public has(key: string): boolean {return this.lruCache.contains(key);}/*** 获取指定key的缓存值* @param key 缓存键* @returns 缓存值,若不存在则返回undefined*/public get<T = any>(key: string): T | undefined {return this.lruCache.get(key) as T;}/*** 添加或更新缓存* @param key 缓存键* @param value 缓存值*/public put(key: string, value: any): void {this.lruCache.put(key, value);}/*** 删除指定key的缓存* @param key 缓存键*/public remove(key: string): void {this.lruCache.remove(key);}/*** 判断缓存是否为空* @returns 是否为空*/public isEmpty(): boolean {return this.lruCache.isEmpty();}/*** 获取当前缓存的容量* @returns 当前容量*/public getCapacity(): number {return this.lruCache.getCapacity();}/*** 更新缓存的容量* @param newCapacity 新的容量*/public updateCapacity(newCapacity: number): void {if (newCapacity <= 0) {throw new Error("Capacity must be greater than 0.");}this.lruCache.updateCapacity(newCapacity);}/*** 清空缓存并重置容量为默认值*/public clear(): void {this.lruCache.clear();this.lruCache.updateCapacity(64); // 重置为默认容量}
}
代码如下:
import { util } from '@kit.ArkTS';/*** LRUCache缓存工具类(单例模式)* @author 鸿蒙布道师* @since 2025/04/21*/
export class LRUCacheUtil {private static instance: LRUCacheUtil;private lruCache: util.LRUCache<string, any>;/*** 私有构造函数,防止外部实例化*/private constructor() {this.lruCache = new util.LRUCache(64); // 默认容量为64}/*** 获取LRUCacheUtil的单例* @returns LRUCacheUtil 单例对象*/public static getInstance(): LRUCacheUtil {if (!LRUCacheUtil.instance) {LRUCacheUtil.instance = new LRUCacheUtil();}return LRUCacheUtil.instance;}/*** 判断是否包含指定key的缓存* @param key 缓存键* @returns 是否存在该key*/public has(key: string): boolean {return this.lruCache.contains(key);}/*** 获取指定key的缓存值* @param key 缓存键* @returns 缓存值,若不存在则返回undefined*/public get<T = any>(key: string): T | undefined {return this.lruCache.get(key) as T;}/*** 添加或更新缓存* @param key 缓存键* @param value 缓存值*/public put(key: string, value: any): void {this.lruCache.put(key, value);}/*** 删除指定key的缓存* @param key 缓存键*/public remove(key: string): void {this.lruCache.remove(key);}/*** 判断缓存是否为空* @returns 是否为空*/public isEmpty(): boolean {return this.lruCache.isEmpty();}/*** 获取当前缓存的容量* @returns 当前容量*/public getCapacity(): number {return this.lruCache.getCapacity();}/*** 更新缓存的容量* @param newCapacity 新的容量*/public updateCapacity(newCapacity: number): void {if (newCapacity <= 0) {throw new Error("Capacity must be greater than 0.");}this.lruCache.updateCapacity(newCapacity);}/*** 清空缓存并重置容量为默认值*/public clear(): void {this.lruCache.clear();this.lruCache.updateCapacity(64); // 重置为默认容量}
}相关文章:
(ArkTs))
鸿蒙NEXT开发LRUCache缓存工具类(单例模式)(ArkTs)
import { util } from kit.ArkTS;/*** LRUCache缓存工具类(单例模式)* author 鸿蒙布道师* since 2025/04/21*/ export class LRUCacheUtil {private static instance: LRUCacheUtil;private lruCache: util.LRUCache<string, any>;/*** 私有构造函…...
opencv 图像矫正的原理
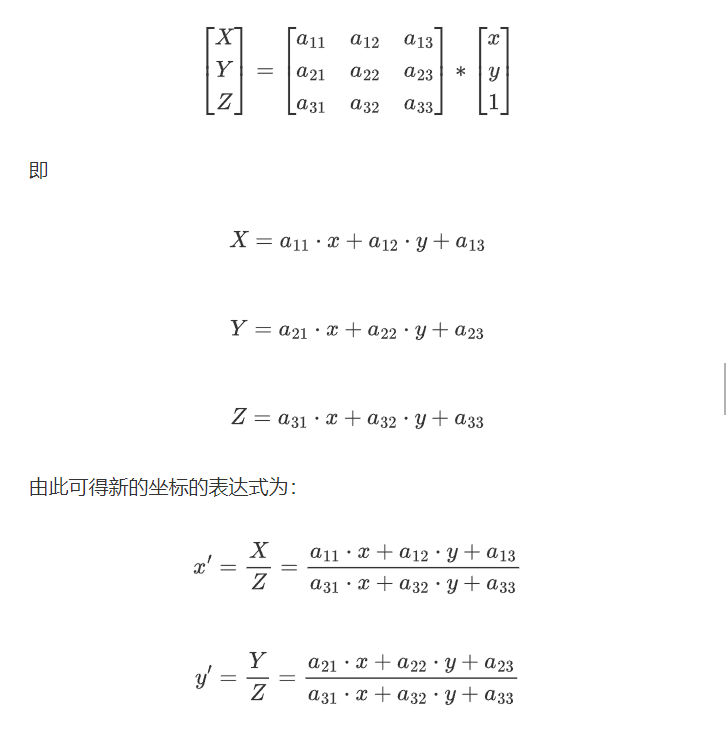
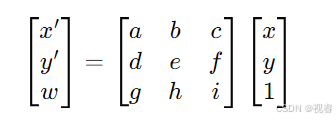
图像矫正的原理是透视变换,下面来介绍一下透视变换的概念。 听名字有点熟,我们在图像旋转里接触过仿射变换,知道仿射变换是把一个二维坐标系转换到另一个二维坐标系的过程,转换过程坐标点的相对位置和属性不发生变换,…...

计算机前沿技术课程论文 K-means算法在图像处理的应用
K-means算法在图像处理的应用 这是本人在计算机前沿技术课程中的课程论文文章,为了方便大家参考学习,我把完整的论文word文档发到了我的资源里,有需要的可以自取。 点击完整资源链接 目录 K-means算法在图像处理的应用摘要:引言1…...

【股票数据API接口37】如何获取股票指数实时数据之Python、Java等多种主流语言实例代码演示通过股票数据接口获取数据
如今,量化分析在股市领域风靡一时,其核心要素在于数据,获取股票数据,是踏上量化分析之路的第一步。你可以选择亲手编写爬虫来抓取,但更便捷的方式,莫过于利用专业的股票数据API接口。自编爬虫虽零成本&a…...
:PlanReactExecutor)
【仓颉 + 鸿蒙 + AI Agent】CangjieMagic框架(17):PlanReactExecutor
CangjieMagic框架:使用华为仓颉编程语言编写,专门用于开发AI Agent,支持鸿蒙、Windows、macOS、Linux等系统。 这篇文章剖析一下 CangjieMagic 框架中的 PlanReactExecutor。 1 PlanReactExecutor的工作原理 #mermaid-svg-OqJUCSoxZkzylbDY…...

docker harbor私有仓库登录报错
docker harbor私有仓库登录报错如下: [rootsrv-1 ~]# docker login -u user1 -p pwd1 harbor.chinacloudapi.cn WARNING! Using --password via the CLI is insecure. Use --password-stdin. Error response from daemon: Get "https://harbor.chinacloudapi.…...

IQ信号和实信号的关系与转换的matlab实现
IQ信号 IQ信号通常是指两路正交的信号(I路和Q路),在实际信号采样中,通常会进行IQ采样,将实信号转换为复基带信号进行存储。 IQ信号转实信号 IQ信号转为实信号,其实就是将IQ两路正交信号通过上变频合并为一个实数的带通信号,这通常在通信系统中用于将基带信号调制到载…...
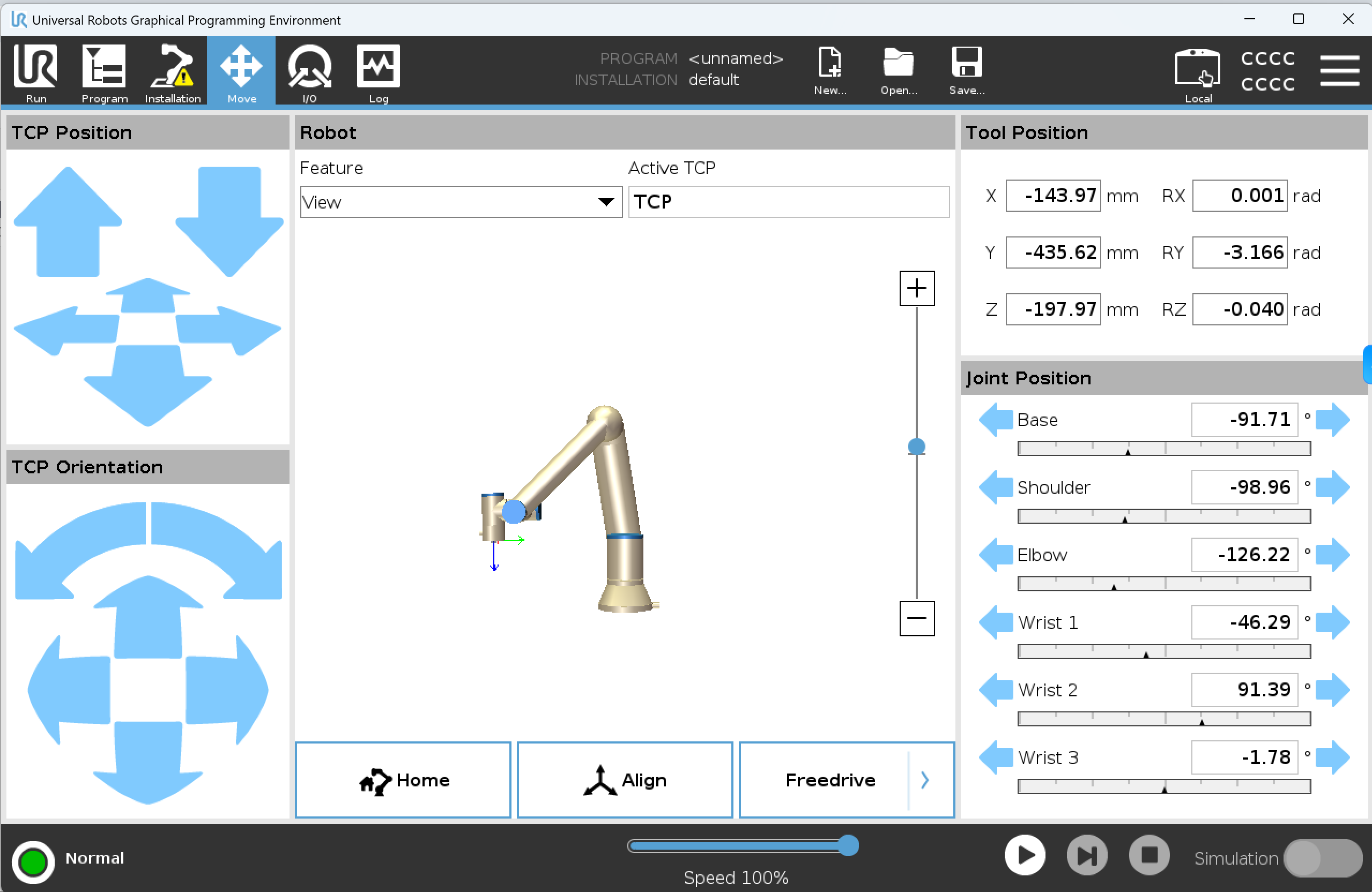
WSL2-Ubuntu22.04安装URSim5.21.3
WSL2-Ubuntu22.04安装URSim5.21.3 准备安装启动 准备 名称版本WSL2Ubuntu22.04URSim5.21.3VcXsrvNaN WSL2安装与可视化请见这篇:WSL2-Ubuntu22.04-配置。 安装 我们是wsl2-ubuntu22.04,所以安装Linux版本的URSim,下载之前需要注册一下,即…...
blender 录课键位显示插件(图文傻瓜式安装)
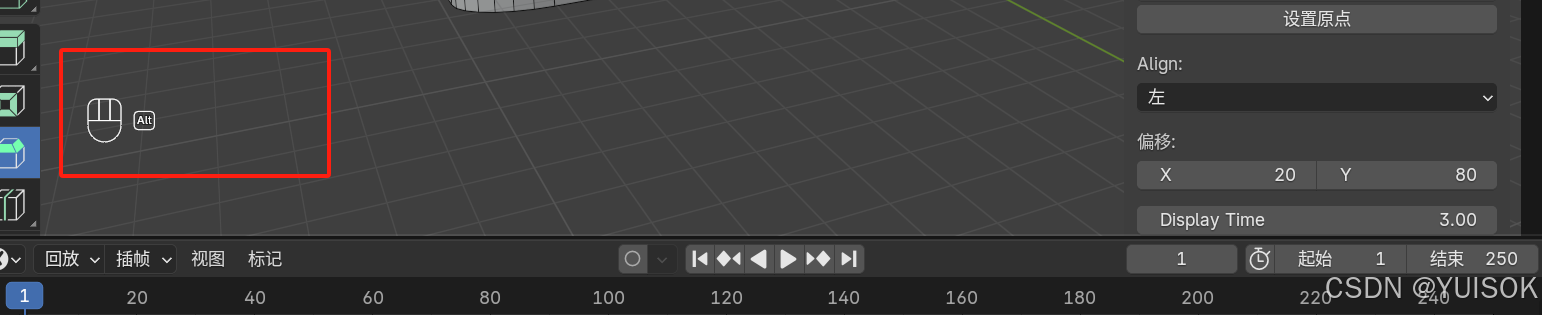
1、下载 点击这个链接进行下载https://github.com/nutti/Screencast-Keys 下载好不用解压 2、安装 打开blender进行安装 点击编辑选择偏好设置 选择插件再点击这个下箭头 选择从磁盘安装 然后找到自己刚刚下载好的,点击从磁盘安装 安装完成后勾选上插件 …...

天翼云手机断开连接2小时关机
2025-04-21 天翼云手机断开连接2小时自动 天翼云手机 4元1个月 天翼云手机永不关机 天翼云手机不休眠 天翼云手机断开连接时,界面显示:离线运行,2小时后自动关机 电脑每小时自动连接一次 手机每小时自动连接一次...
基于 FFmpeg 的音视频处理基础原理与实验探究
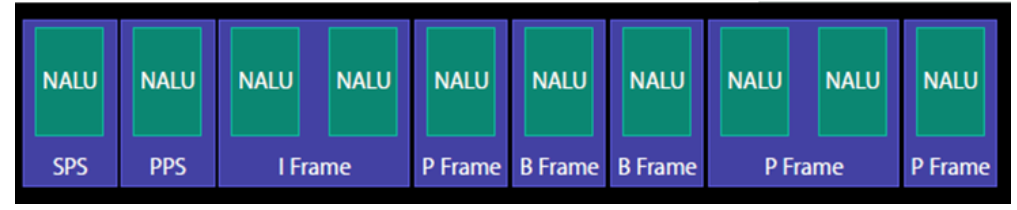
目录 1 基本知识1.1 解封装1.2 AAC和ADTS说明 1.3 H2641.3.1 H264编码结构解析1.3.2 NALU1.3.2 分类 2 实验1 探究音视频信息2.1 重要结构体介绍2.2 相关的API 3 实验二 提取AAC数据4 实验三 提取h264 1 基本知识 1.1 解封装 封装的逆向操作:封装是把音频流、视频流…...
 与数组 (Array) 的定长世界)
【Rust 精进之路之第5篇-数据基石·下】复合类型:元组 (Tuple) 与数组 (Array) 的定长世界
系列: Rust 精进之路:构建可靠、高效软件的底层逻辑 作者: 码觉客 发布日期: 2025-04-20 引言:从原子到分子——组合的力量 在上一篇【数据基石上】中,我们仔细研究了 Rust 的四种基本标量类型࿱…...

【前端样式】用 aspect-ratio 实现等比容器:视频封面与图片占位的终极解决方案
在网页开发中,处理视频封面、图片卡片等需要固定比例的容器一直是前端工程师的必修课。本文将以 aspect-ratio 属性为核心,深入探讨如何优雅实现等比容器,并通过完整代码示例和常见问题解析,助你彻底掌握这一现代布局利器。 目录…...

【网络安全】OWASP 十大漏洞
1. OWASP 十大漏洞 为了应对未来的风险,安全专业人员需要随时掌握最新信息。之前,您了解了CVE 列表,这是一个公开的已知漏洞和暴露列表。CVE 列表是全球安全社区相互共享信息的重要信息来源。 在本文中,您将了解安全专业人士参考…...
我用deepseek做了一个提取压缩文件夹下pdf和word文件工具
由于最近需要把大量的压缩文件的pdf和word文件统一复制到一个文件夹中。 我们一般正常操作方式的是把一个压缩文件一个一个解压,然后在把一个的解压好的文件夹下文件复制到另外一个文件夹中。 这个也需太繁琐了,从以往统计的需要花费两个小时间&#x…...

【Docker】在容器中使用 NVIDIA GPU
解决容器 GPU 设备映射问题,实现 AI 应用加速 🔗 官方文档:NVIDIA Container Toolkit GitHub 常见错误排查 若在运行测试容器时遇到以下错误: docker: Error response from daemon: could not select device driver ""…...
机器人进阶---视觉算法(五)仿射变换和投影变换有什么区别
仿射变换和投影变换有什么区别 1. 定义2. 几何特性3. 变换矩阵4. 应用场景5. Python代码示例仿射变换投影变换6. 总结仿射变换和投影变换都是图像处理中常用的几何变换方法,但它们在变换性质、应用场景和变换矩阵等方面存在一些关键区别。 1. 定义 仿射变换 (Affine Transform…...
如何在 Amazon EC2 上部署 Java(Spring Boot 版)
让我们学习如何将 Java Spring Boot Web 服务器部署到 Amazon EC2。每月只需 3 美元。 使用 Azure,您可能不知道要花费多少钱。 Spring Boot 项目示例 在本教程中,我们将重点介绍如何将 Java Spring Boot 服务器部署到 Amazon EC2,因此我们不…...
IDEA打不开、打开报错
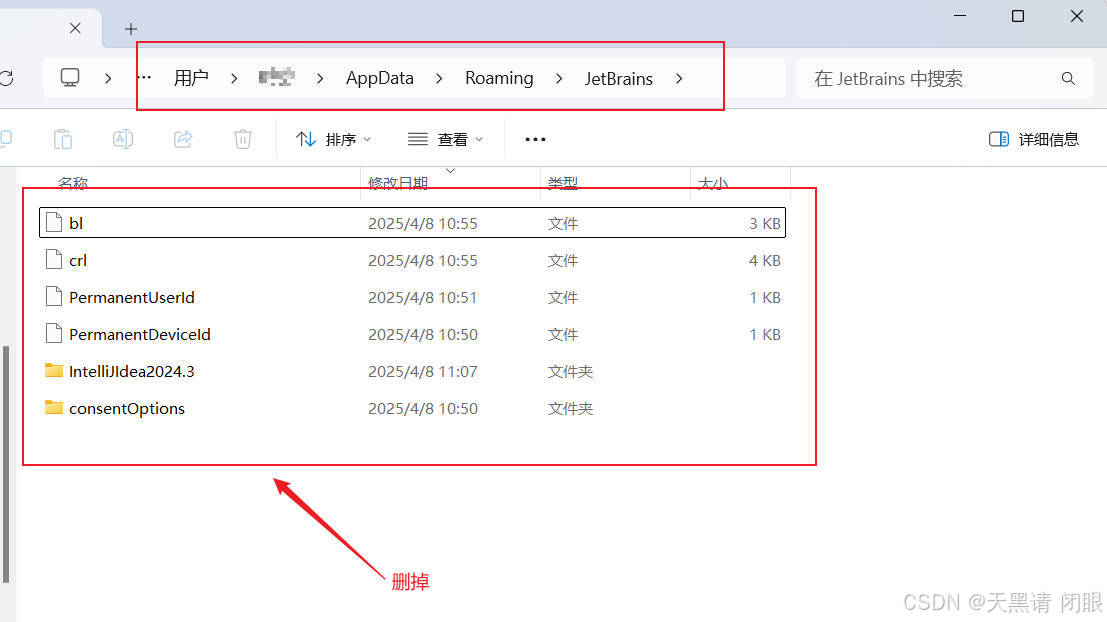
目录 场景异常原因解决 场景 1、本机已经安装了IDEA 2、再次安装另外一个版本的IDEA后打不开、打开报错 异常 这里忘记截图了。。。 原因 情况1-打不开:在同一台电脑安装多个IDEA是需要对idea的配置文件进行调整的,否则打不开 情况2-打开报错&#…...

【React】项目的搭建
create-react-app 搭建vite 搭建相关下载 在Vue中搭建项目的步骤:1.首先安装脚手架的环境,2.通过脚手架的指令创建项目 在React中有两种方式去搭建项目:1.和Vue一样,先安装脚手架然后通过脚手架指令搭建;2.npx create-…...

如何提高单元测试的覆盖率
一、定位未覆盖的代码 利用 IDEA 的覆盖率工具: 右键测试类 → Run with Coverage,或使用 AltShiftF10(Windows)打开运行菜单选择覆盖率。查看高亮标记: 绿色:已覆盖代码行。红色&#x…...

【SAP ME 43】RESRCE表操作导致HANA中表锁定解决方案
症状 SAP ME 通过执行以下 SQL 查询导致 RESRCE 表上的 HANA 数据库锁: 从 RESRCE WHERE HANDLE =? 选择站点待更新 或者 SELECT HANDLE FROM RESRCE WHERE HANDLE =... 用于更新 其他条款 HANA、锁、RESRCE 原因和前提条件 该问题是由运行 SQL FOR UPDATE 查询时的 …...

使用C#和FFmpeg开发RTSP视频播放器的完整指南
RTSP(Real Time Streaming Protocol)是流媒体技术中广泛使用的协议,广泛应用于视频监控、视频会议和在线直播等领域。本文将详细介绍如何使用C#和FFmpeg开发一个功能完整的RTSP视频播放器,涵盖从环境搭建到核心功能实现的全部过程。 一、开发环境准备 …...
CSS例子 > 图片瀑布流布局(vue2)
<template><div class"container"><!-- 临时容器用于计算高度 --><div v-if"!isLayoutReady" class"temp-container"><divv-for"(item, index) in list":key"temp- index":ref"(el) > …...
1.2软考系统架构设计师:系统架构的定义与作用 - 练习题附答案及超详细解析
系统架构定义与作用综合知识单选题 题目覆盖核心概念、发展历程、设计原则、评估标准及易混淆点,附答案解析: 1. 系统架构的标准定义源自于以下哪个标准? A. ISO/IEC 9126 B. IEEE 1471-2000 C. TOGAF 9.2 D. ITIL v4 答案:B 简…...
关于springmvc的404问题的一种猜测解决方案
本文是记录关于在学习动力结点老杜的springmvc时候遇到的404报错的一种解决方式; 由于本人之前学过老杜的springmvc,且运行成功,当时使用的是tomcat10.1.19版本。 idea使用2023.3.2版本。 而这次进行回顾的时候,使用tomcat10.0.1…...

PGSql常用操作命令
1 连接数据库: psql -U postgres (psql -U username -d databse_name -h host -W) -U 指定用户 -d 指定数据库 -h 要链接的主机 -W 提示输入密码 psql -h 主机名/服务器IP -p 端口号 -U 用户名 -d 数据库名 注意:(…...
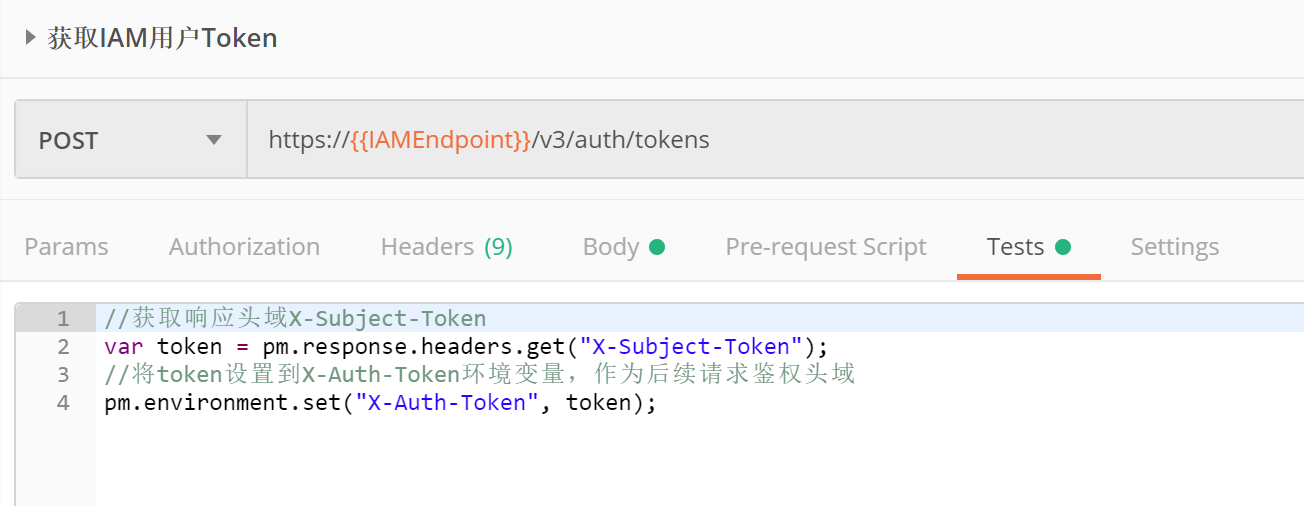
使用Postman调测“获取IAM用户Token”接口实际操作
概述 Postman是网页调试与辅助接口调用的工具,具有界面简洁清晰、操作方便快捷的特性,可以处理用户发送的HTTP请求,例如:GET,PUT、POST,DELETE等,支持用户修改HTTP请求中的参数并返回响应数据。…...
—— Spring MVC)
Java面试(2025)—— Spring MVC
什么是Spring MVC Spring MVC 是 Spring 框架的一个 基于 Java 的 Web 开发模块,它实现了 MVC(Model-View-Controller)架构模式,用于构建灵活、松耦合的 Web 应用程序。 它是 Spring 生态的核心组件之一,通过简化 HTT…...

如何测试雷达与相机是否时间同步?
在多传感器融合系统中,相机与雷达的协同感知已成为环境理解的关键。相机通过捕捉纹理信息识别物体类别,而雷达利用激光或毫米波实现全天候精确测距。两者的数据融合既能避免单一传感器缺陷(如相机受光照影响、雷达缺乏语义信息)&a…...