相机雷达外参标定算法调研
0. 简介
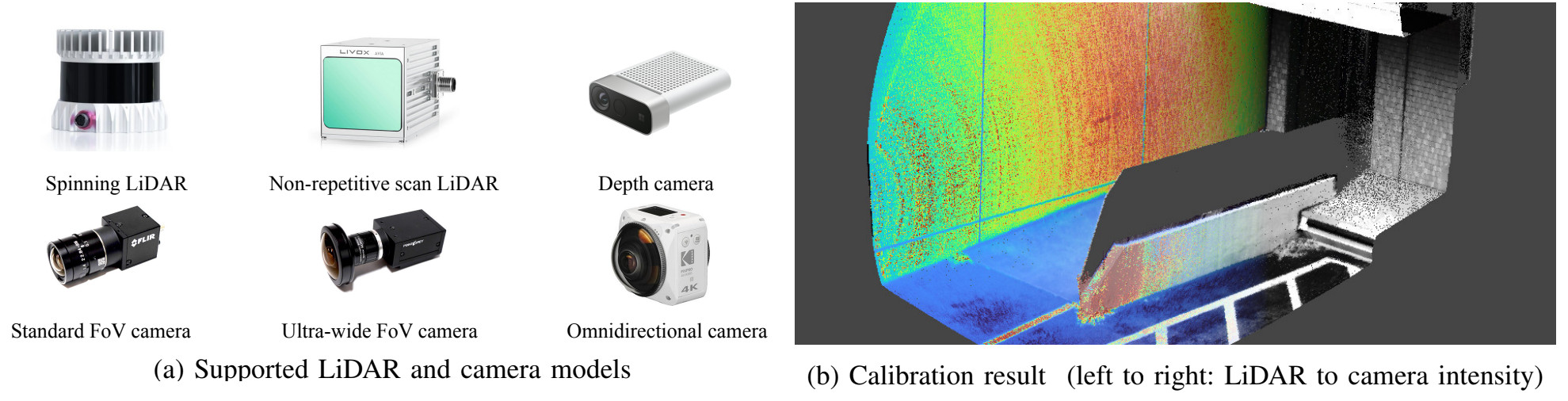
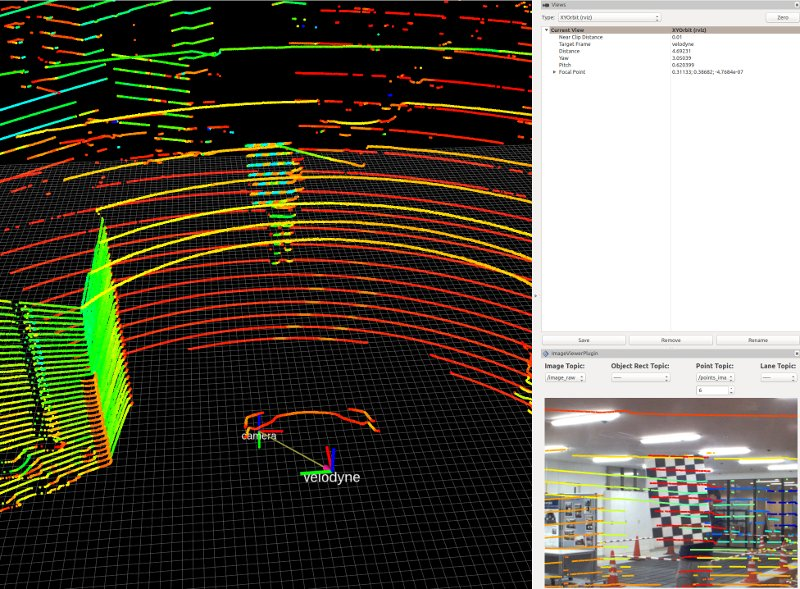
相机与激光雷达的外参标定是自动驾驶、机器人等领域的基础工作。精准的标定不仅有助于提高数据融合的效果,还能提升算法的整体性能。随着技术的发展,许多研究者和公司致力于开发高效的标定工具和算法,本文将对无目标标定和有目标标定两种主要的标定方法进行调研。
1. 无目标标定
无目标标定的主要特点是无需使用特定的标定目标,而是利用环境中的自然特征进行标定。以下是几种代表性的无目标标定方法和工具:
- Direct Visual Lidar Calibration
- 该软件包提供了一种通用的激光雷达与相机的标定工具,可以处理各种激光雷达和相机的投影模型。标定过程中不需要标定目标,依赖于环境结构和纹理进行标定。
- 特点:自动化程度高,不需要初始猜测,精度高且稳健。
- 链接
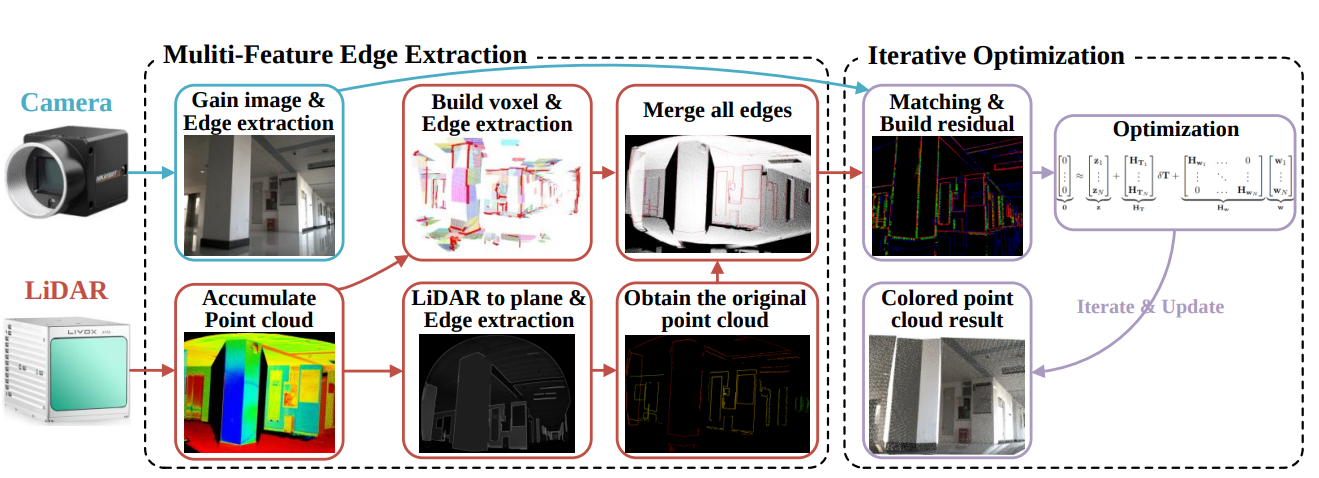
- MFCalibMFCalib旨在在无靶标环境下实现自动外参标定。该方法结合了从激光雷达(LiDAR)点云中提取的多特征边缘与从图像中提取的自然边缘特征,通过单次数据采集,最小化重投影误差。MFCalib通过对LiDAR光束的建模,有效解决了深度不连续边缘膨胀的问题,展现了出色的适应性,能够在多种室内外场景中快速调整外参,从而克服了传统基于靶标方法的局限性。
MFCalib研究论文链接
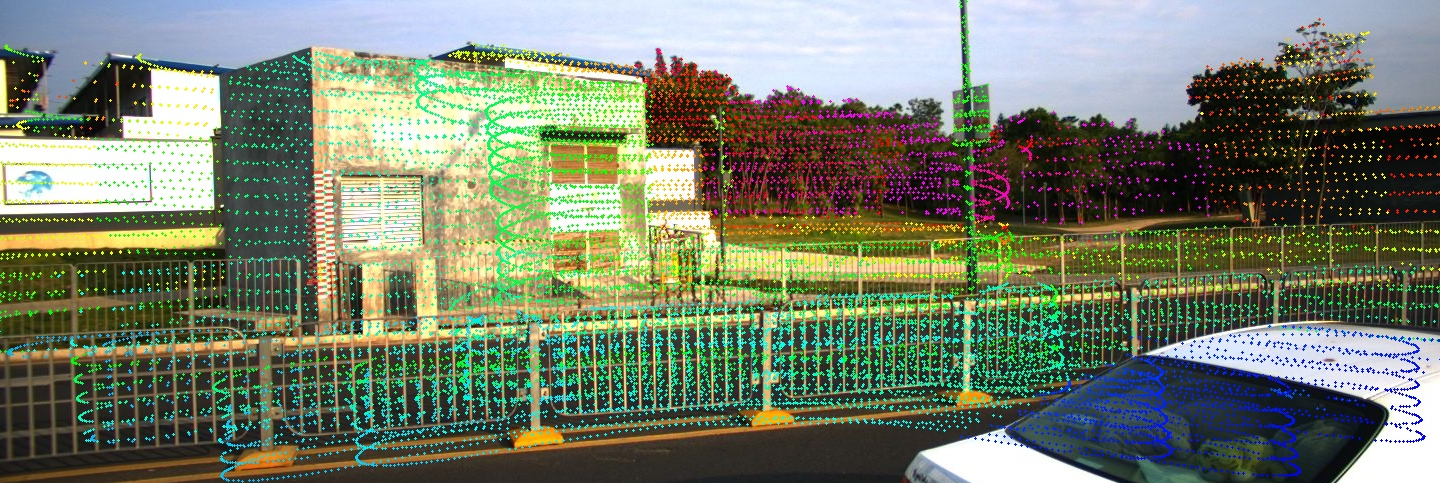
3. Livox Camera Calibration整个工作的流程如下:首先,利用Canny算子从图像中提取边缘特征。随后,对雷达点云进行体素化分割,并通过RANSAC聚类算法识别出边缘特征。接着,这些雷达边缘特征被投影到相机矩阵中进行匹配。之后,计算雷达点云的噪声模型,并建立约束关系,确保投影到图像平面上的雷达点和对应的图像特征之间的向量与图像法向量的乘积为零。接下来,将相关公式进行代入和一阶偏导近似,得到雷达点云测量误差的近似公式。最终,采用最小化该误差方差的方法,得到的收敛解即为所需的外参估计。
Livox Camera Calibration
4. MIAS-LCEC:激光雷达-相机外参标定(LCEC)对于智能车辆中的数据融合至关重要。传统上,基于目标的离线方法在该领域一直是首选。然而,这些方法通常对现实环境的适应性较差,主要是因为外参可能因中等冲击或在振动环境中长时间操作而发生显著变化。相比之下,在线无目标的方法提供了更大的适应性,但通常缺乏鲁棒性,主要是因为跨模态特征匹配中的挑战。因此,本文充分挖掘大型视觉模型(LVMs)的潜力,这些模型在计算机视觉和机器人领域,尤其是体感人工智能中,正成为重要趋势,以实现各种挑战场景下的鲁棒和准确的在线无目标LCEC。
MIAS-LCEC工具箱
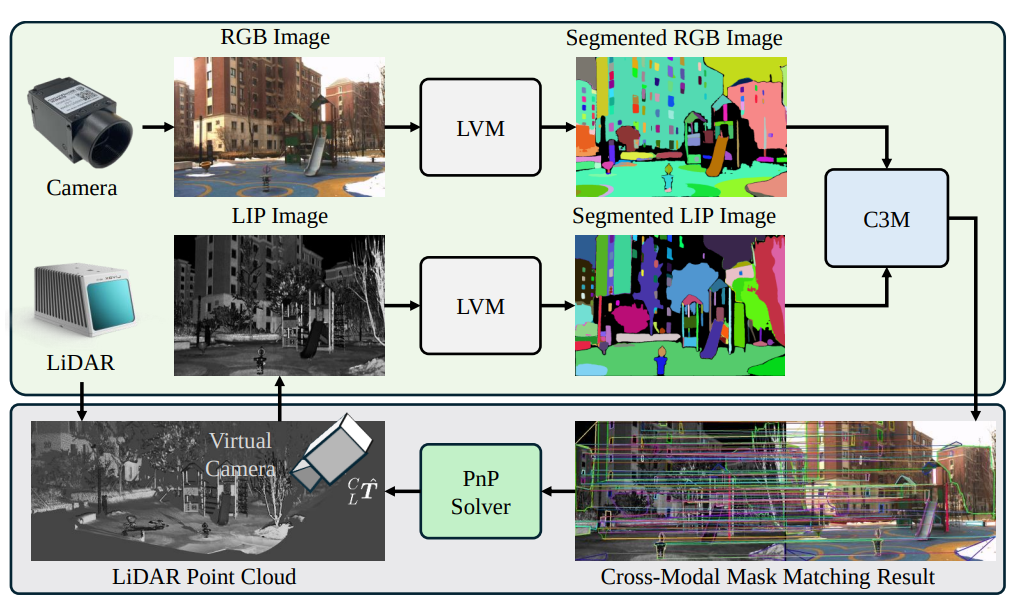
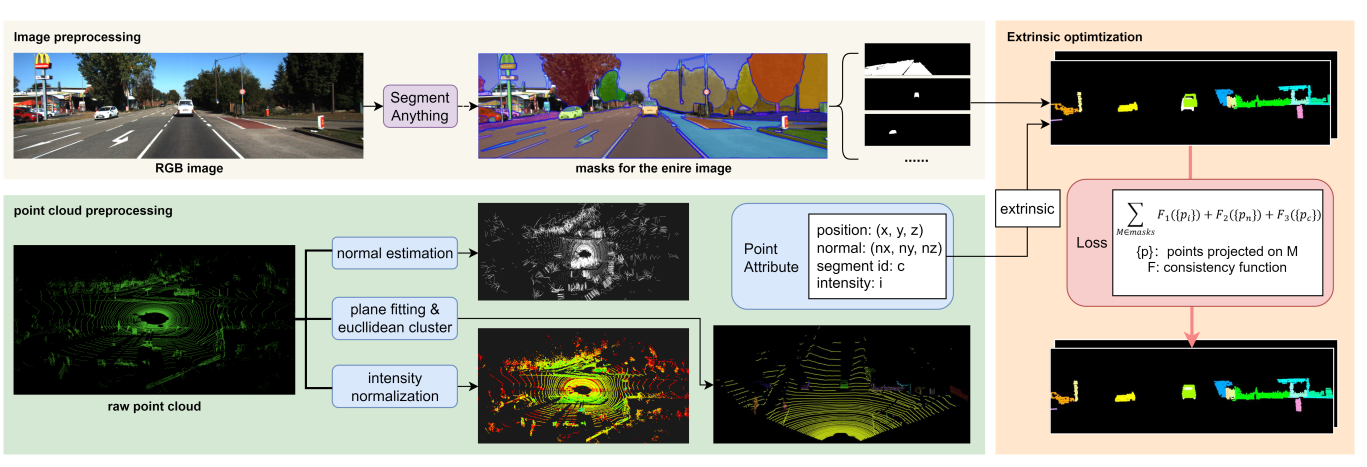
5. CalibAnything算法是应用pcl分割点云,sam分割图像,通过匹配物体间重合获取最终外参,算法感知结果应用到标定前端的结合应用
链接
- Extended Lidar Camera Calibration
Extended Lidar Camera Calibration 是对livox_camera_calib的扩展版本,适用于旋转式激光雷达(例如:VLP16)。为了使该算法能够在旋转激光雷达上应用,作者增加了预处理过程(FLOAM),以使旋转激光雷达的点云更加稠密。这一改进有助于提高标定的精度和鲁棒性,适应更复杂的环境。
链接
7.LCCNet
LCCNet 是一个在线激光雷达相机自校准网络(LCCNet),可以进行端到端训练并实时预测外部参数。在 LCCNet 中,我们利用成本体积层来表达 RGB 图像特征和从点云投影的深度图像之间的外参。链接

2. 有目标标定
有目标标定是指使用特定的标定板或目标物体进行外参标定。以下是一些常见的有目标标定工具和方法:
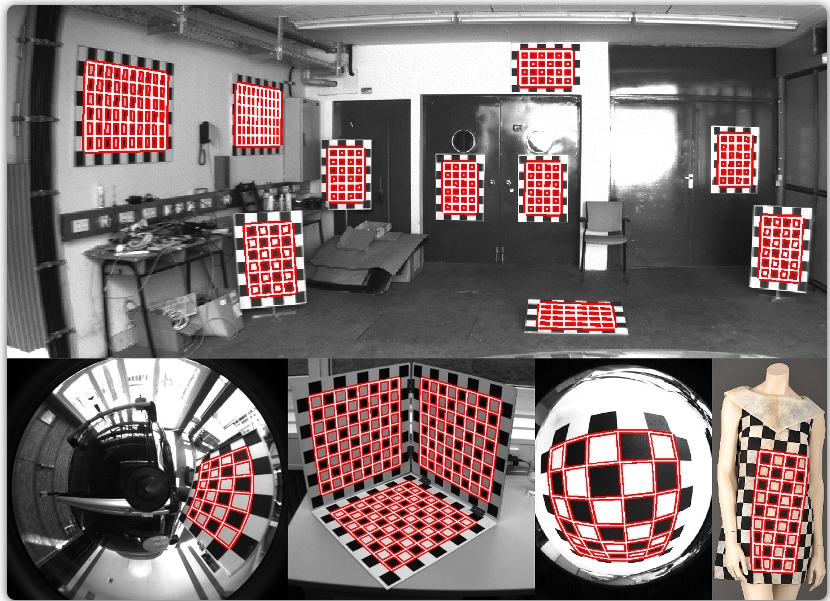
- Libcbdetect
- 一个MATLAB实现的棋盘格检测算法,能够自动提取角点到亚像素精度,适用于各种相机类型。
- 链接
- Livox-Camera标定工具
- 提供了手动校准Livox雷达与相机之间外参的方法,基于标定板的角点进行标定,适用于Mid-40、Horizon和Tele-15等设备。
- 中文文档
- 链接
- Autoware 标定包
- Autoware框架下的激光雷达与相机标定工具包,封装了多种标定算法,方便开发者使用。
- 链接
- ROS 标定工具
- ROS下的Camera LIDAR Calibration Package,提供了一套完整的标定流程,适用于ROS环境。
- 链接

- 2D Lidar-Camera工具箱
- 基于ROS的单线激光与相机外参数自动标定代码,通过二维码估计标定板平面在相机坐标系下的方程。
- 链接
这些有目标标定方法通常具有较高的精度,对标定目标的要求相对较高,但在静态环境下的标定效果更为可靠。
6. Apollo 标定工具
Apollo标定工具箱,链接
…详情请参照古月居
相关文章:
相机雷达外参标定算法调研
0. 简介 相机与激光雷达的外参标定是自动驾驶、机器人等领域的基础工作。精准的标定不仅有助于提高数据融合的效果,还能提升算法的整体性能。随着技术的发展,许多研究者和公司致力于开发高效的标定工具和算法,本文将对无目标标定和有目标标定…...
网络原理 - 7(TCP - 4)
目录 6. 拥塞控制 7. 延时应答 8. 捎带应答 9. 面向字节流 10. 异常情况 总结: 6. 拥塞控制 虽然 TCP 有了滑动窗口这个大杀器,就能够高效可靠的发送大量的数据,但是如果在刚开始阶段就发送大量的数据,仍然可能引起大量的…...
)
JAVA---面向对象(上)
今天写重生之我开始补知识 第二集 面向对象编程:拿东西过来做对应的事。 设计对象并使用 1.类和对象 类(设计图):是对象共同特征的描述; 对象:是具体存在的具体东西; 如何定义类…...
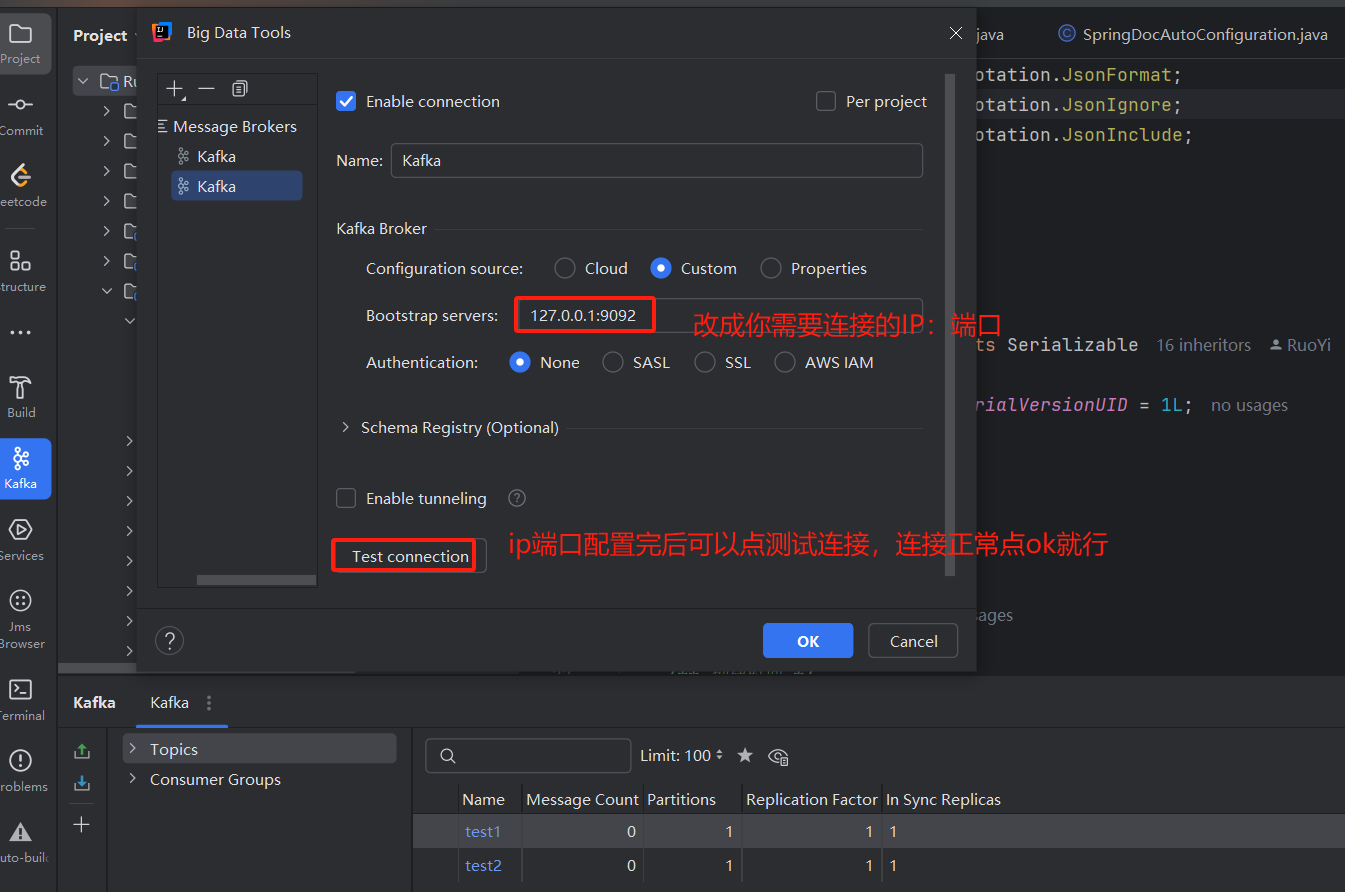
idea连接远程服务器kafka
一、idea插件安装 首先idea插件市场搜索“kafka”进行插件安装 二、kafka链接配置 1、检查服务器kafka配置 配置链接前需要保证远程服务器的kafka配置里边有配置好服务器IP,以及开放好kafka端口9092(如果有修改 过端口的开放对应端口就好) …...
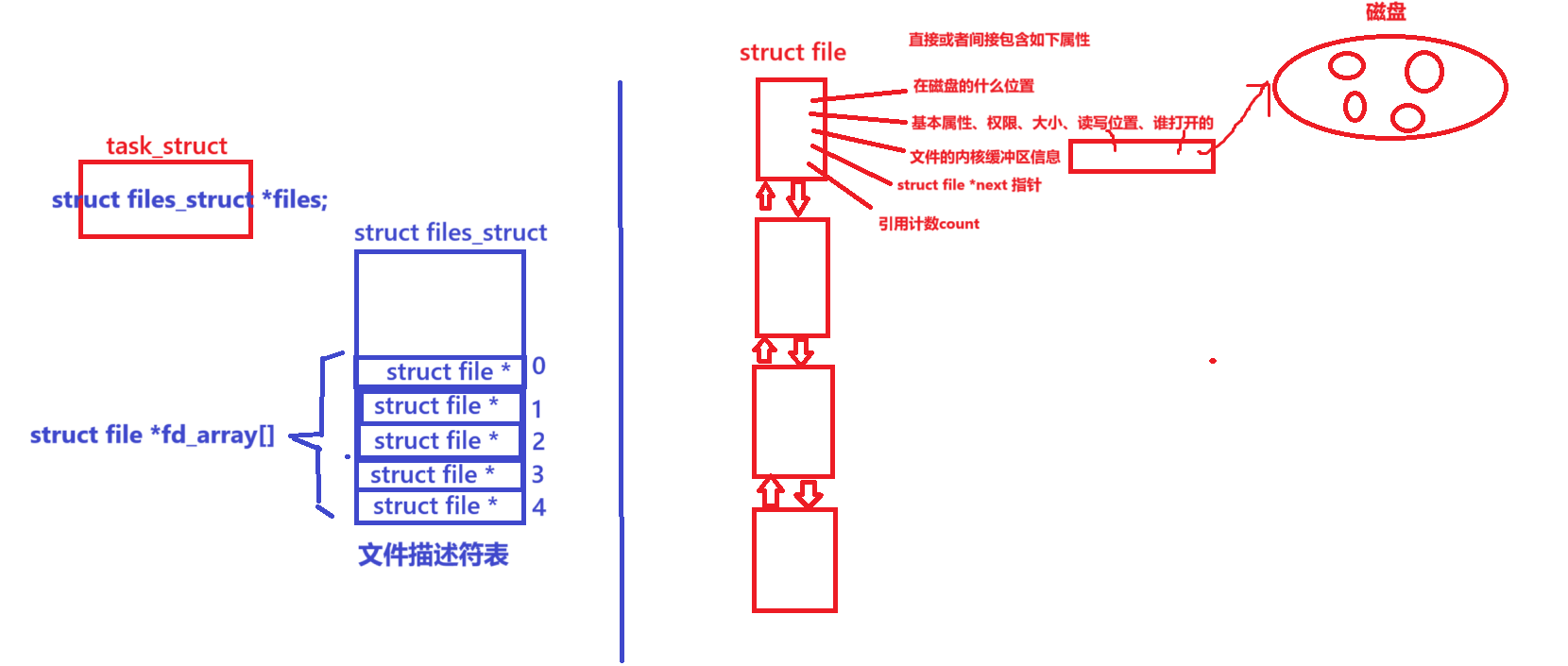
Linux操作系统--基础I/O(上)
目录 1.回顾C文件接口 stdin、stdout、stderr 2.系统文件I/O 3.接口介绍 4.open函数返回值 5.文件描述符fd 5.1 0&1&2 1.回顾C文件接口 hello.c写文件 #include<stdio.h> #include<string.h>int main() {FILE *fp fopen("myfile","…...

IOMUXC_SetPinMux的0,1参数解释
IOMUXC_SetPinMux(IOMUXC_ENET1_RX_DATA0_FLEXCAN1_TX, 0); 这里的第二个参数 0 实际上传递给了 inputOnfield,它控制的是 SION(Software Input On)位。 当 inputOnfield 为 0 时,SION 关闭,此时引脚的输入/输出方向由…...

go 的 net 包
目录 一、net包的基本功能 1.1 IP地址处理 1.2 网络协议支持 1.3 连接管理 二、net包的主要功能模块 2.1 IP地址处理 2.2 TCP协议 2.3 UDP协议 2.4 Listener和Conn接口 三、高级功能 3.1 超时设置 3.2 KeepAlive控制 3.3 获取连接信息 四、实际应用场景 4.1 Web服…...
weibo_har鸿蒙微博分享,单例二次封装,鸿蒙微博,微博登录
weibo_har鸿蒙微博分享,单例二次封装,鸿蒙微博 HarmonyOS 5.0.3 Beta2 SDK,原样包含OpenHarmony SDK Ohos_sdk_public 5.0.3.131 (API Version 15 Beta2) 🏆简介 zyl/weibo_har是微博封装使用,支持原生core使用 &a…...
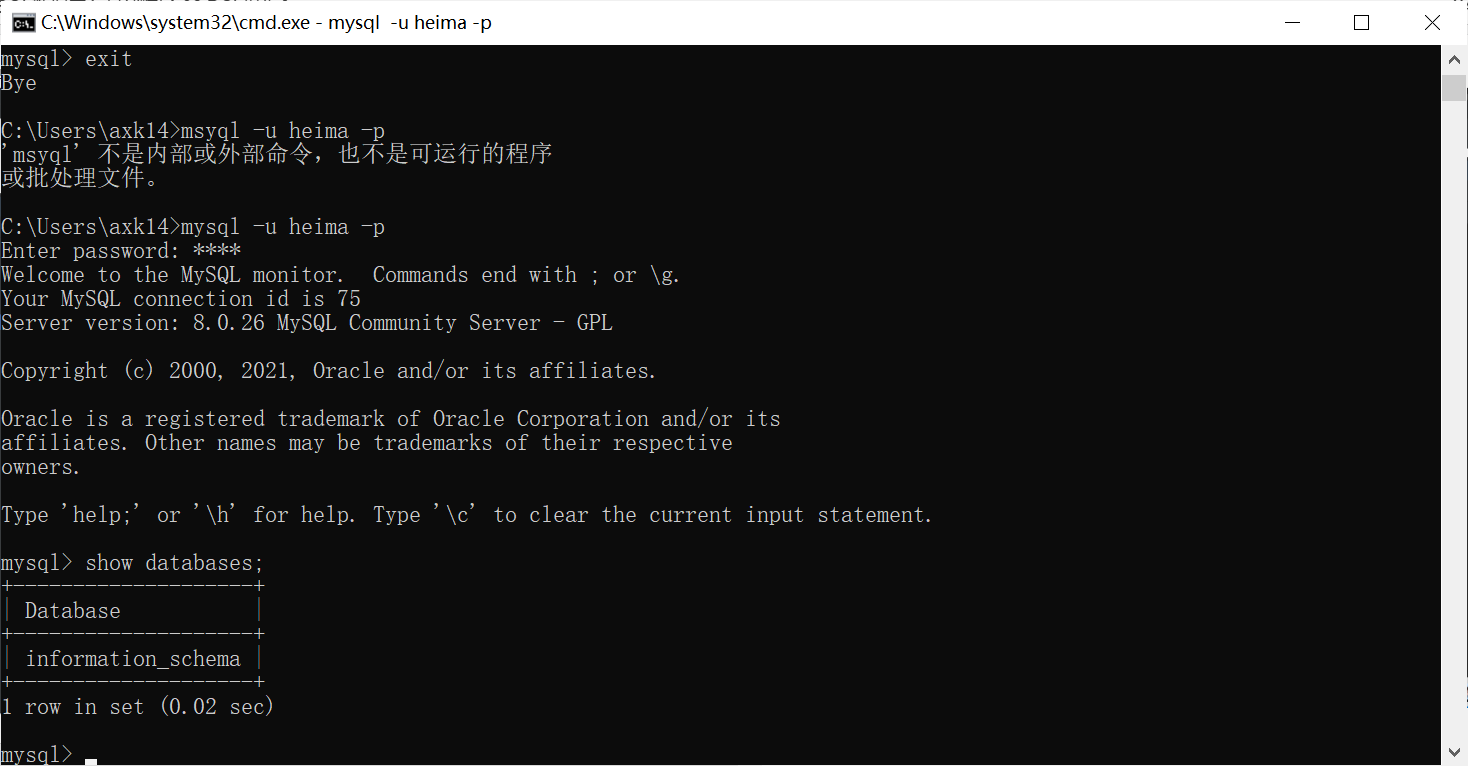
【MySQL数据库入门到精通-06 DCL操作】
一、DCL DCL英文全称是Data Control Language(数据控制语言),用来管理数据库用户、控制数据库的访 问权限。 二、管理用户 1.查询与创建用户 代码如下(示例): -- DCL 管理用户 -- 1.查询用户 use mysql; select *from user;-…...

第55讲:农业人工智能的跨学科融合与社会影响——构建更加可持续、包容的农业社会
目录 一、农业人工智能的多维融合:科技与社会的桥梁 1. 技术与社会:解决现代农业中的不平等 2. AI与伦理:塑造道德规范与社会责任 3. AI与政策:推动农业政策的科学决策与智能执行 二、AI与农业未来社会的构建:更绿色、更智能、更包容 1. 推动农业可持续发展:绿色农…...

nodejs之Express-介绍、路由
五、Express 1、express 介绍 express 是一个基于 Node.js 平台的极简、灵活的 WEB 应用开发框架,官方网址: https://www.expressjs.com.cn/ 简单来说,express 是一个封装好的工具包,封装了很多功能,便于我们开发 WEB 应用(HTTP 服务) (1)基本使用 第一步:初始化项目并…...

无感字符编码原址转换术——系统内存(Mermaid文本图表版/DeepSeek)
安全便捷无依赖,不学就会无感觉。 笔记模板由python脚本于2025-04-24 20:00:05创建,本篇笔记适合正在研究字符串编码制式的coder翻阅。 学习的细节是欢悦的历程 博客的核心价值:在于输出思考与经验,而不仅仅是知识的简单复述。 P…...

ecovadis认证需要提供哪些文件?ecovadis认证优势是什么?
EcoVadis认证详解:所需文件与核心优势 一、EcoVadis认证需要提供哪些文件? EcoVadis评估基于企业提交的ESG(环境、社会、治理)相关文档,具体包括以下四类核心主题的文件: 1. 环境(Environment…...

第七部分:向量数据库和索引策略
什么是矢量数据库? 简单来说,向量数据库是一种专门化的数据库,旨在优化存储和检索以高维向量形式表示的文本。 为什么这些数据库对RAG至关重要?因为向量表示能够在大规模文档库中进行高效的基于相似性的搜索,根据用户…...

Java 2025 技术全景与实战指南:从新特性到架构革新
作为一名Java开发者,2025年的技术浪潮将带给我们前所未有的机遇与挑战。本文将带你深入探索Java生态的最新发展,从语言特性到架构革新,助你在技术洪流中把握先机! 🌟 Java 2025 新特性全景 1. 模式匹配的全面进化 (J…...
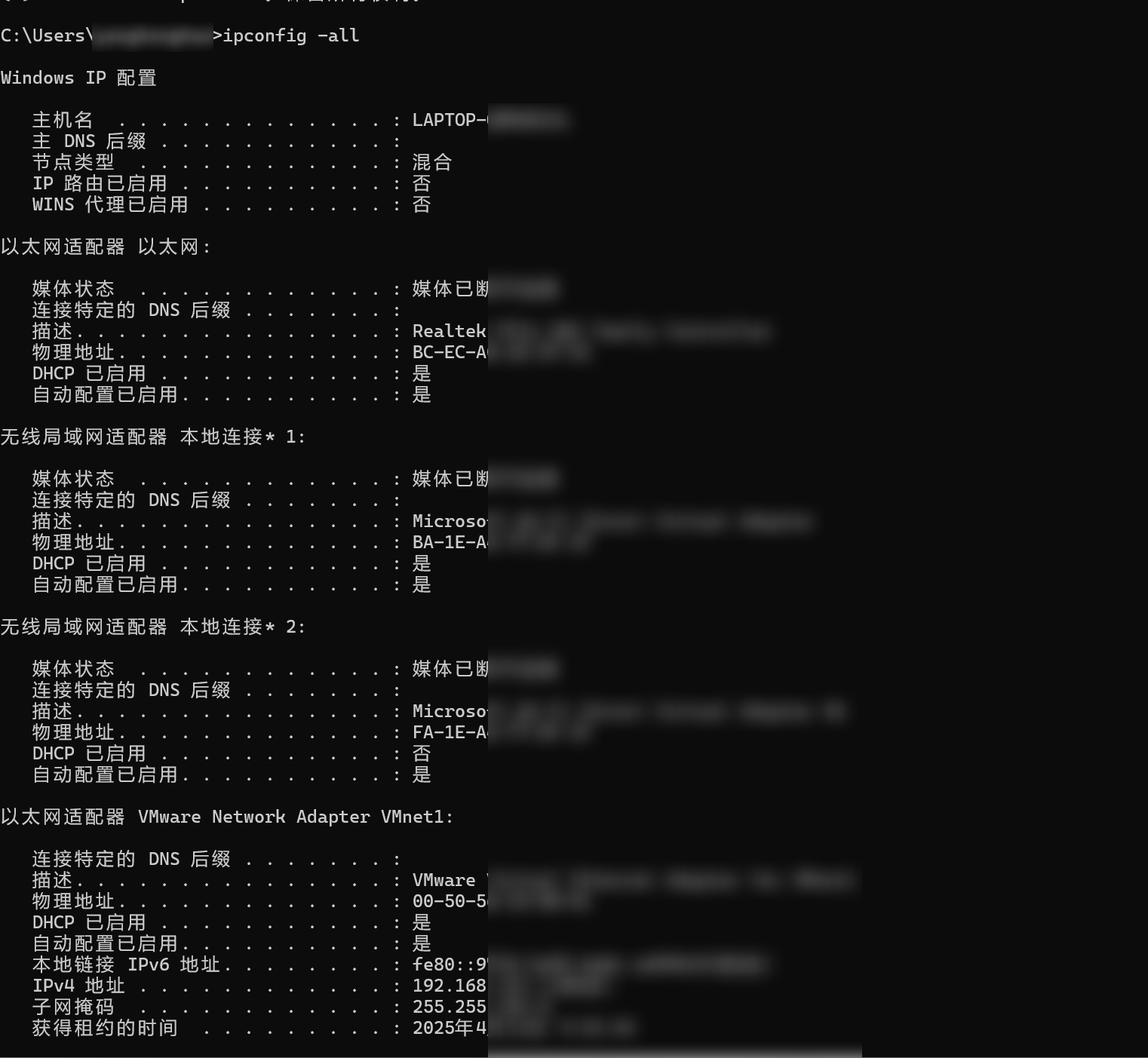
查看MAC 地址以及简单了解
MAC地址 简介 MAC 地址(Media Access Control Address),直译为媒体访问控制地址,又称局域网地址(LAN Address)、MAC 地址、以太网地址(Ethernet Address)、硬件地址(Ha…...

c语言 write函数
write函数 #include <unistd.h>ssize_t write(int fd, const void *buf, size_t count); 参数说明 fd:这是文件描述符,用于指定要写入数据的目标对象。文件描述符是一个非负整数,它代表了一个打开的文件、设备、管道等。常见的文件描述符有: 0:标准输入(stdin)。…...

Halcon 的基础用法
基础语法 1. 下载链接2. 赋值3. 判断符4. 循环5. 加载图片6. 读取文件夹下所有图片 1. 下载链接 链接:https://pan.baidu.com/s/1ZhQ_tTcubUtUggbb-OxUGw?pwdw3rs 提取码:w3rs 2. 赋值 x : 1 s : hello list2 : [a, b, c]3. 判断符 * 等于比较符 if(x 1)h : 6 endif* 不等…...

《100天精通Python——基础篇 2025 第2天:Python解释器安装与基础语法入门》
目录 一、Windows安装Python1.1 下载并安装 Python1.2 测试安装是否成功 二、Linux系统安装Python(新手可以跳过)2.1 基于RockyLinux系统安装Python(编译安装)2.2 基于Ubuntu系统安装Python(编译安装)2.3 macOS 安装python解释器 三、如何运行Python程序?3.1 Python…...
MyBatis 和 MyBatis-Plus 在 Spring Boot 中的配置、功能对比及 SQL 日志输出的详细说明,重点对比日志输出的配置差异
以下是 MyBatis 和 MyBatis-Plus 在 Spring Boot 中的配置、功能对比及 SQL 日志输出的详细说明,重点对比日志输出的配置差异: 1. MyBatis 和 MyBatis-Plus 核心对比 特性MyBatisMyBatis-Plus定位基础持久层框架MyBatis 的增强版,提供代码生…...

【大模型有哪些训练阶段?】
大模型(如 GPT、BERT 等)训练一般可以分为以下 三个主要阶段,每个阶段都承担着不同的职责,共同推动模型从“语言新手”成长为“多任务专家”。 🧠 一、预训练阶段(Pre-training) 📌…...
动手试一试 Spring Boot默认缓存管理
1.准备数据 使用之前创建的springbootdata的数据库,该数据库有两个表t_article和t_comment,这两个表预先插入几条测试数据。 2.编写数据库表对应的实体类 Entity(name "t_comment") public class Comment {IdGeneratedValue(strategy Gener…...

A2A Agent 框架结构化分析报告
A2A Agent 框架结构化分析报告 第一章 绪论 1.1 引言 在全球数字化转型的浪潮中,人工智能(Artificial Intelligence, AI)技术正以前所未有的速度改变着我们的生活和工作方式。然而,随着AI系统的广泛应用,单一AI系统…...
Opencv图像处理:旋转、打包、多图像匹配
文章目录 一、图像的旋转1、使用numpy方法实现旋转1)顺时针旋转90度2)逆时针旋转90度 2、使用opencv的方法实现图像旋转1)顺时针旋转90度2)逆时针旋转90度3)旋转180度 3、效果 二、多图像匹配1、模板2、匹配对象3、代码…...

BOM与DOM(解疑document window关系)
BOM(浏览器对象模型) 定义与作用 BOM(Browser Object Model)提供与浏览器窗口交互的接口,用于控制导航、窗口尺寸、历史记录等浏览器行为 window:浏览器窗口的顶层对象,包含全局属性和方法&am…...

数据仓库建设全解析!
目录 一、数据仓库建设的重要性 1. 整合企业数据资源 2. 支持企业决策制定 3. 提升企业竞争力 二、数据仓库建设的前期准备 1. 明确业务需求 2. 评估数据源 3. 制定项目计划 三、数据仓库建设的具体流程 1.需求分析 2.架构设计 3.数据建模 4.ETL 开发 5.…...
时序约束 记录
一、基础知识 1、fpga的约束文件为.fdc,synopsys的约束文件为.sdc。想通过fpga验证soc设计是否正确,可以通过syn工具(synplify)吃.fdc把soc code 转换成netlist。然后vivado P&R工具通过吃上述netlist、XDC 出pin脚约束、fdc时序约束三个约束来完成…...

Redis-cli常用参数及功能的详细说明
Redis-cli常用参数及功能的详细说明 相关参考知识书籍 <<Redis运维与开发>> 以下是Redis-cli常用参数及功能的详细说明 1. **-r(重复执行命令)** 作用:重复执行指定命令多次。 示例:执行3次PING命令࿱…...

第十七届山东省职业院校技能大赛 中职组网络建设与运维赛项
第十七届山东省职业院校技能大赛 中职组网络建设与运维赛项 赛题 B 卷 第十七届山东省职业院校技能大赛中职组网络建设与运维赛项 1 赛题说明 一、竞赛项目简介 “网络建设与运维”竞赛共分为以下三个模块: 网络理论测试; 网络建设与调试…...
基于SpringBoot的在线抽奖系统测试用例报告
一、项目背景 在线抽奖系统采用前后端分离的方法来实现,同时使用了数据库来存储相关的数据,redis来缓存验证码,RabbitMQ来缓存信息队列,同时将其部署到云服务器上。前端主要有登录页、后台管理页、活动列表页,抽奖页等…...