【计算机视觉】CV实战项目 - 基于YOLOv5的人脸检测与关键点定位系统深度解析

基于YOLOv5的人脸检测与关键点定位系统深度解析
- 1. 技术背景与项目意义
- 传统方案的局限性
- YOLOv5多任务方案的优势
- 2. 核心算法原理
- 网络架构改进
- 关键点回归分支
- 损失函数设计
- 3. 实战指南:从环境搭建到模型应用
- 环境配置
- 数据准备
- 数据格式要求
- 数据目录结构
- 模型训练
- 配置文件修改
- 启动训练
- 模型测试与推理
- 单张图像测试
- 实时视频流处理
- 4. 关键技术问题与解决方案
- 1. 关键点抖动问题
- 2. 小脸检测效果差
- 3. 口罩人脸误检
- 4. 常见报错处理
- 4. 性能优化与进阶改进
- 1. 损失函数改进
- 2. 模型轻量化
- 3. 部署优化
- 5. 学术背景与相关研究
- 项目总结与展望
人脸检测与关键点定位是计算机视觉领域的核心任务,在面部识别、增强现实、人机交互等应用中扮演着关键角色。本文将全面剖析yolov5_face_landmark项目,这是一个基于YOLOv5改进的、同时实现人脸检测和关键点定位的高效解决方案。我们将从技术原理、实现细节、实战部署到优化方向,深入探讨这一多任务学习系统的技术精髓。
1. 技术背景与项目意义
传统方案的局限性
传统人脸关键点检测通常采用两阶段方案:
- 检测阶段:使用MTCNN等网络定位人脸区域
- 关键点阶段:在裁剪后的人脸区域应用专门的landmark检测器(如HRNet)
这种方案存在明显缺陷:
- 效率低下:两阶段处理导致冗余计算
- 误差累积:检测阶段的误差会影响关键点定位精度
- 实时性差:难以满足视频流实时处理需求
YOLOv5多任务方案的优势
本项目采用端到端的多任务学习框架,具有以下创新点:
- 统一架构:单次前向传播同时输出检测框和关键点坐标
- 精度提升:关键点与检测任务共享特征,相互促进
- 推理速度:在1080Ti上实现150FPS的实时处理能力
- 模型轻量:最小的yolov5s-face模型仅7.1MB
2. 核心算法原理
网络架构改进
原始YOLOv5架构扩展为多任务输出:
# yolov5/models/yolo.py 中的修改
class Detect(nn.Module):def __init__(self, nc=80, anchors=(), ch=(), landmarks=5): # 新增landmarks参数super().__init__()self.landmarks = landmarks# 检测头保持不变self.no = nc + 5 + 2 * landmarks # 每个anchor的输出维度变化...
关键点回归分支
关键点采用归一化坐标表示:
(x1,y1,x2,y2,conf,cls,kpt_x1,kpt_y1,...,kpt_x5,kpt_y5)
其中关键点坐标相对于图像宽高归一化到[0,1]范围
损失函数设计
在loss.py中实现多任务损失平衡:
# 修改后的损失计算
loss = (lbox + lobj + lcls + llandmark) * batch_size
其中:
lbox: 检测框回归损失(CIoU)lobj: 目标置信度损失(BCE)lcls: 分类损失(BCE)llandmark: 关键点回归损失(Wing Loss)
3. 实战指南:从环境搭建到模型应用
环境配置
基础环境要求:
- Python 3.8+
- PyTorch 1.7+
- CUDA 11.0 (GPU版本)
- OpenCV 4.5+
推荐安装步骤:
# 克隆仓库
git clone https://github.com/xialuxi/yolov5_face_landmark.git
cd yolov5_face_landmark# 安装依赖
pip install -r requirements.txt# 安装特殊依赖
pip install wingloss # 关键点损失函数
数据准备
数据格式要求
# 标注文件示例(train.txt)
image_path x1,y1,x2,y2,cls_id,kpt_x1,kpt_y1,...,kpt_x5,kpt_y5
关键点坐标需归一化到[0,1]范围
数据目录结构
datasets/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/
└── data.yaml # 数据集配置文件
模型训练
配置文件修改
# hyp.scratch.yaml 关键修改
landmark: 0.5 # 关键点损失权重
landmark_loss: 'wing' # 使用Wing Loss
启动训练
python train.py \--data data/face.yaml \--cfg models/yolov5s-face.yaml \--weights '' \--batch-size 64 \--epochs 300 \--hyp hyp.scratch.yaml \--img-size 640
模型测试与推理
单张图像测试
python detect_one.py \--weights runs/train/exp/weights/best.pt \--source test.jpg \--conf-thres 0.5 \--kpt-thres 0.3
实时视频流处理
# 自定义视频处理脚本
from models.experimental import attempt_load
from utils.datasets import LoadStreamsmodel = attempt_load('best.pt')
dataset = LoadStreams('0', img_size=640) # 0表示摄像头设备for img, orig_img in dataset:pred = model(img)[0]# 后处理与可视化...
4. 关键技术问题与解决方案
1. 关键点抖动问题
现象:视频流中关键点位置不稳定
解决方案:
# 添加卡尔曼滤波
from filterpy.kalman import KalmanFilterkf = KalmanFilter(dim_x=10, dim_z=5) # 5个关键点
for kpt in keypoints:kf.predict()kf.update(kpt)smoothed_kpt = kf.x
2. 小脸检测效果差
优化策略:
- 修改anchor设置适应小脸:
# models/yolov5s-face.yaml
anchors:- [5,6, 8,14, 15,11] # 更小的anchor尺寸
- 使用多尺度训练:
python train.py --multi-scale
3. 口罩人脸误检
改进方案:
# 在关键点分支添加口罩分类
class Detect(nn.Module):def __init__(self, ...):self.mask_branch = nn.Linear(2*landmarks, 2) # 新增口罩分类头def forward(self, x):...mask_conf = self.mask_branch(kpts) # [0,1]表示戴口罩概率
4. 常见报错处理
错误1:AttributeError: 'Detect' object has no attribute 'landmarks'
原因:模型定义与权重不匹配
解决:
# 加载模型时指定landmarks参数
model = attempt_load('best.pt', landmarks=5)
错误2:RuntimeError: shape mismatch in wingloss
排查:
print(kpt_pred.shape, kpt_true.shape) # 应同为[batch, num_kpt*2]
4. 性能优化与进阶改进
1. 损失函数改进
Wing Loss公式:
\text{Wing}(x) = \left\{
\begin{array}{ll}
w \ln(1 + |x|/\epsilon) & \text{if } |x| < w \\
|x| - C & \text{otherwise}
\end{array}
\right.
其中:
- w w w: 非线性区域宽度(通常取10)
- ϵ \epsilon ϵ: 平滑参数(通常取2)
- C = w − w ln ( 1 + w / ϵ ) C = w - w \ln(1 + w/\epsilon) C=w−wln(1+w/ϵ)
代码实现:
class WingLoss(nn.Module):def __init__(self, w=10, e=2):super().__init__()self.w = wself.e = eself.C = w - w * math.log(1 + w/e)def forward(self, pred, target):x = (target - pred).abs()loss = torch.where(x < self.w,self.w * torch.log(1 + x/self.e),x - self.C)return loss.mean()
2. 模型轻量化
通道剪枝方案:
python prune.py \--weights runs/train/exp/weights/best.pt \--percent 0.3 \--img-size 640 \--batch-size 32
3. 部署优化
TensorRT加速:
python export.py \--weights best.pt \--include onnx \--img 640 \--batch 1trtexec --onnx=best.onnx \--saveEngine=best.engine \--fp16
5. 学术背景与相关研究
-
基础论文:
- 《YOLOv5: A New State-of-the-Art in Real-Time Object Detection》(2021)
- 《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》(CVPR 2018)
-
扩展阅读:
- 《RetinaFace: Single-stage Dense Face Localisation in the Wild》(CVPR 2020)
- 《Coordinate Attention for Efficient Mobile Network Design》(CVPR 2021)
-
最新进展:
- 《YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications》(2022)
- 《YOLO-FaceV2: A Scale and Occlusion Aware Face Detector》(2023)
项目总结与展望
本项目通过巧妙改造YOLOv5架构,实现了高效准确的人脸检测与关键点定位一体化方案。其核心价值在于:
-
工程实践性:
- 提供完整的训练-评估-部署流程
- 兼容原始YOLOv5生态
- 支持多种损失函数选择
-
技术创新点:
- 多任务学习的优雅实现
- 关键点回归与检测的协同优化
- 针对人脸场景的专用改进
未来发展方向:
- 增加3D关键点预测能力
- 集成人脸属性分析(年龄/性别/表情)
- 开发移动端优化版本
- 探索自监督预训练范式
通过本项目,开发者可以深入理解多任务学习在计算机视觉中的应用,掌握工业级人脸分析系统的开发方法,为后续开展相关研究和产品开发奠定坚实基础。
相关文章:
【计算机视觉】CV实战项目 - 基于YOLOv5的人脸检测与关键点定位系统深度解析
基于YOLOv5的人脸检测与关键点定位系统深度解析 1. 技术背景与项目意义传统方案的局限性YOLOv5多任务方案的优势 2. 核心算法原理网络架构改进关键点回归分支损失函数设计 3. 实战指南:从环境搭建到模型应用环境配置数据准备数据格式要求数据目录结构 模型训练配置文…...

【python】如何将python程序封装为cpython的库
python程序在发布时,往往会打包为cpython的库,并且根据应用服务器的不同架构(x86/aarch64),以及python的不同版本,封装的输出类型也是非常多。本文介绍不同架构指定python下的代码打包方式: 首…...

【人工智能】DeepSeek 的开源生态:释放 AI 潜能的社区协同与技术突破
《Python OpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门! 解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界 DeepSeek 作为中国 AI 领域的先锋,以其高效的混合专家模型(MoE)和彻底的开源策略,在全球 AI 社区掀起波澜。本文深入剖析 DeepSeek 的开…...
)
【差分隐私】假设检验的视角(高斯差分隐私)
在差分隐私中,假设检验的框架被用来量化攻击者通过机制输出区分两个相邻数据集 S S S 和 S ′ S S′ 的难度。这种区分的根本困难直接反映了隐私保护强度。以下是对问题的详细解释: 1. 假设检验的基本设定 原假设 H 0 H_0 H0:数据集为 …...
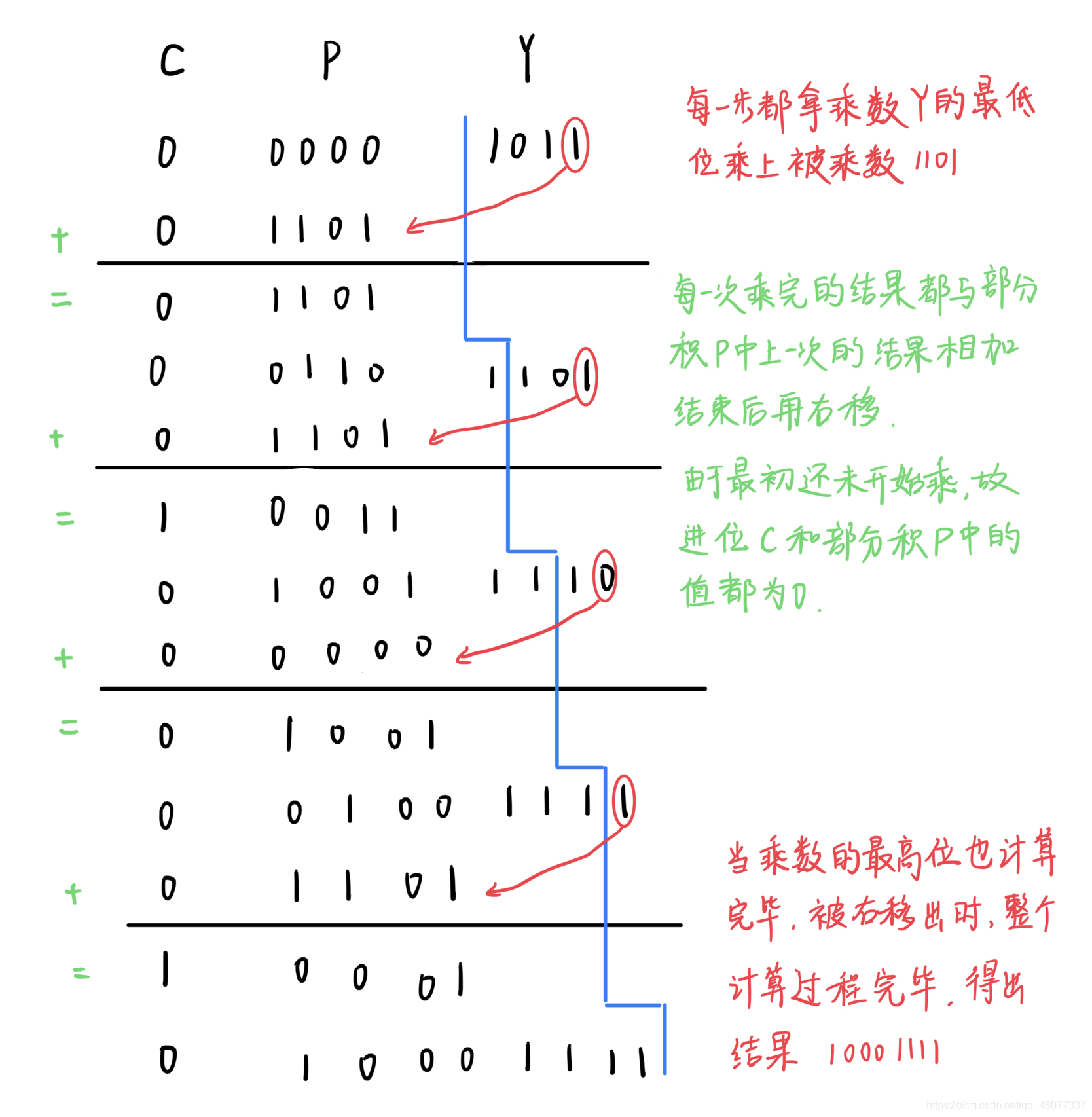
计算机组成原理 课后练习
例一: 例二: 1. 原码一位乘 基本原理 原码是一种直接表示数值符号和大小的方式:最高位为符号位(0表示正,1表示负),其余位表示数值的绝对值。原码一位乘的核心思想是逐位相乘,并通…...

pytorch手动调整学习率
文章目录 1. 为什么引入学习率衰减?2. 针对不同层设置不一样的学习率3. 手动更新学习率4. 使用学习率调度器5. 推荐做法 在前面的文章中,介绍了各种学习率。在此,将进行拓展,学习如何手动更新学习率(即不使用pytorch自…...
SVN仓库突然没有权限访问
如果svn仓库突然出现无法访问的情况,提示没有权限,所有账号都是如此,新创建的账号也不行。 并且会突然提示要输入账号密码。 出现这个情况时,大概率库里面的文件有http或者https的字样,因为单独给该文件添加权限导致…...

【Qt】文件
🌈 个人主页:Zfox_ 🔥 系列专栏:Qt 目录 一:🔥 Qt 文件概述 二:🔥 输入输出设备类 三:🔥 文件读写类 四:🔥 文件和目录信息类 五&…...
)
7.DJI-PSDK:psdk负载应用固件升级(基于RTOS)
DJI-PSDK:psdk负载应用固件升级(基于RTOS): 在单片机应用程序开发阶段,我们可以借助keil5和J-LINK来直接下载应用程序进行开发和调试, 但在产品交付之后,我们对应用程序做了改动和升级,是断然不可能采用这种方式的,我们应该将新版本的程序固件打包发给客户, 能够方便用…...

ArrayUtils:数组操作的“变形金刚“——让你的数组七十二变
各位数组操控师们好!今天给大家带来的是Apache Commons Lang3中的ArrayUtils工具类。这个工具就像数组界的"孙悟空",能让你的数组随心所欲地变大、变小、变长、变短,再也不用对着原生数组的"死板"叹气了! 一…...

架构-系统可靠性分析与设计
一、可靠性相关基本概念 1. 可靠性与可用性 可靠性:软件系统在遇到错误、意外操作或系统故障时,仍能维持自身功能特性的能力。 举例:手机银行APP在用户误操作(如快速点击多次转账)时,仍能正确处理交易并避…...
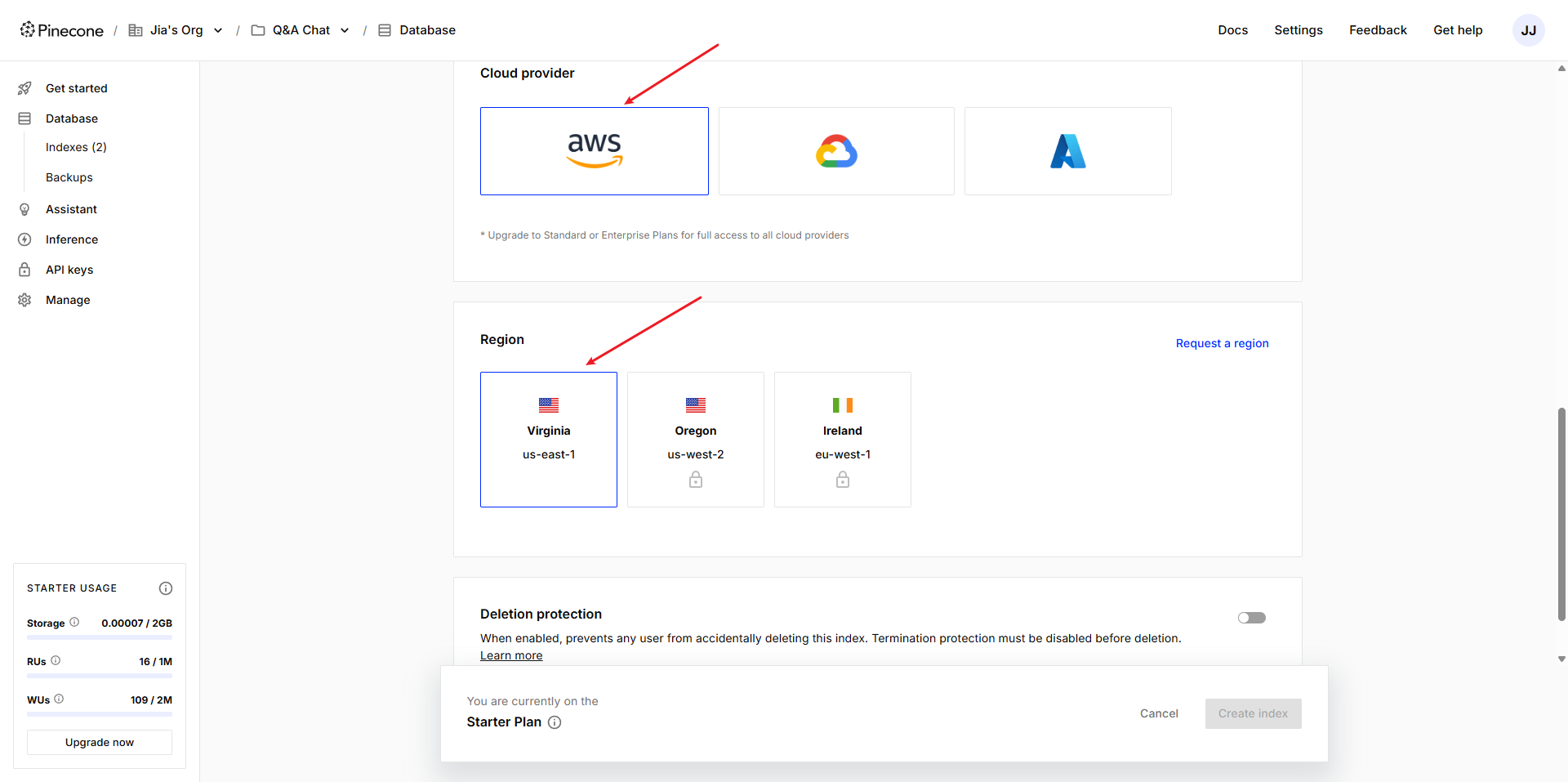
【AI】[特殊字符]生产规模的向量数据库 Pinecone 使用指南
一、Pinecone 的介绍 Pinecone是一个完全托管的向量数据库服务,专为大规模机器学习应用设计。它允许开发者轻松存储、搜索和管理高维向量数据,为推荐系统、语义搜索、异常检测等应用提供强大的基础设施支持。 1.1 Pinecone的核心特性 1. 高性能向量搜…...

大模型备案对模型训练语料的要求
昨天接到一位客户的咨询,说他们的模型还在开发阶段,想提前了解一下大模型备案政策中对于模型训练语料有什么具体要求,提前规避一下。客户确实有前瞻性,考虑得比较充分。训练语料在研发阶段至关重要,直接影响模型的性能…...
dstream
DStream转换DStream 上的操作与 RDD 的类似,分为 Transformations(转换)和 Output Operations(输出)两种,此外转换操作中还有一些比较特殊的原语,如:updateStateByKey()、transform(…...

CentOS系统中MySQL安装步骤分享
在 CentOS 系统上安装 MySQL,需要依次进行环境检查、软件源配置、安装 MySQL、启动服务等操作。我将按照规范流程,为你详细分享完整且具体的安装步骤。 在 CentOS 系统中安装 MySQL 数据库,能够为各类应用提供高效稳定的数据存储和管理服务。…...
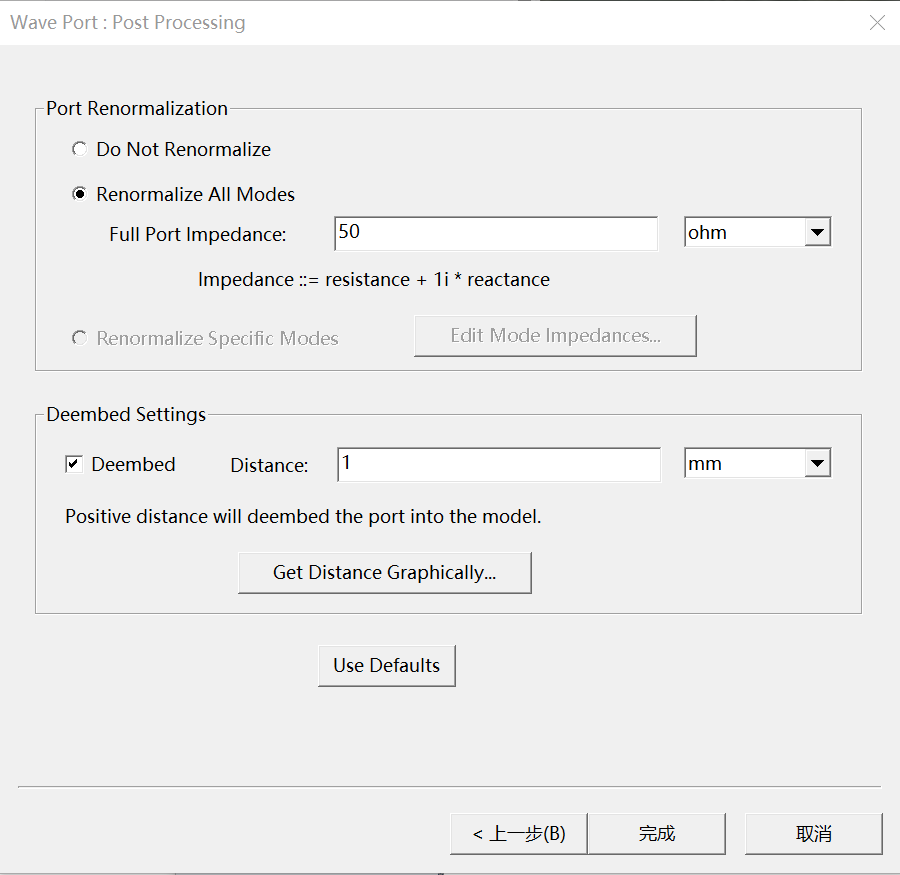
HFSS5(李明洋)——设置激励(波端口激励)
Magnetic是适用于铁磁氧导体的,只有前三种激励类型可以用于计算S参数 1波端口激励 也可以设置在模型内部,如果是设置在模型内部必须加一段理想导体,用于指定端口方向 1.1——模式 number 输入N:计算1-N的模式都计算 1.2——模式…...
ubiquant比赛系列——用docker准备ubipoker开发环境
比赛过程: 环境准备: #在云服务器上拉python官方的docker镜像并下载到本地 https://hub.docker.com/_/python/ sudo docker pull python:3.11.12-slim-bullseye sudo docker images sudo docker save -o 3.11.12-slim-bullseye.tar python:3.11.12-slim…...

运维打铁:Mysql 分区监控以及管理
文章目录 一、简介二、设计逻辑1、配置文件检查2、创建逻辑3、 删除逻辑4、重建表分区逻辑5、recognize maxvalue分区表逻辑6、创建多个未来分区逻辑7、定时检测分区是否创建成功,否则发送告警邮件。 三、解决的问题四、配置例子与介绍 一、简介 操作数据库…...
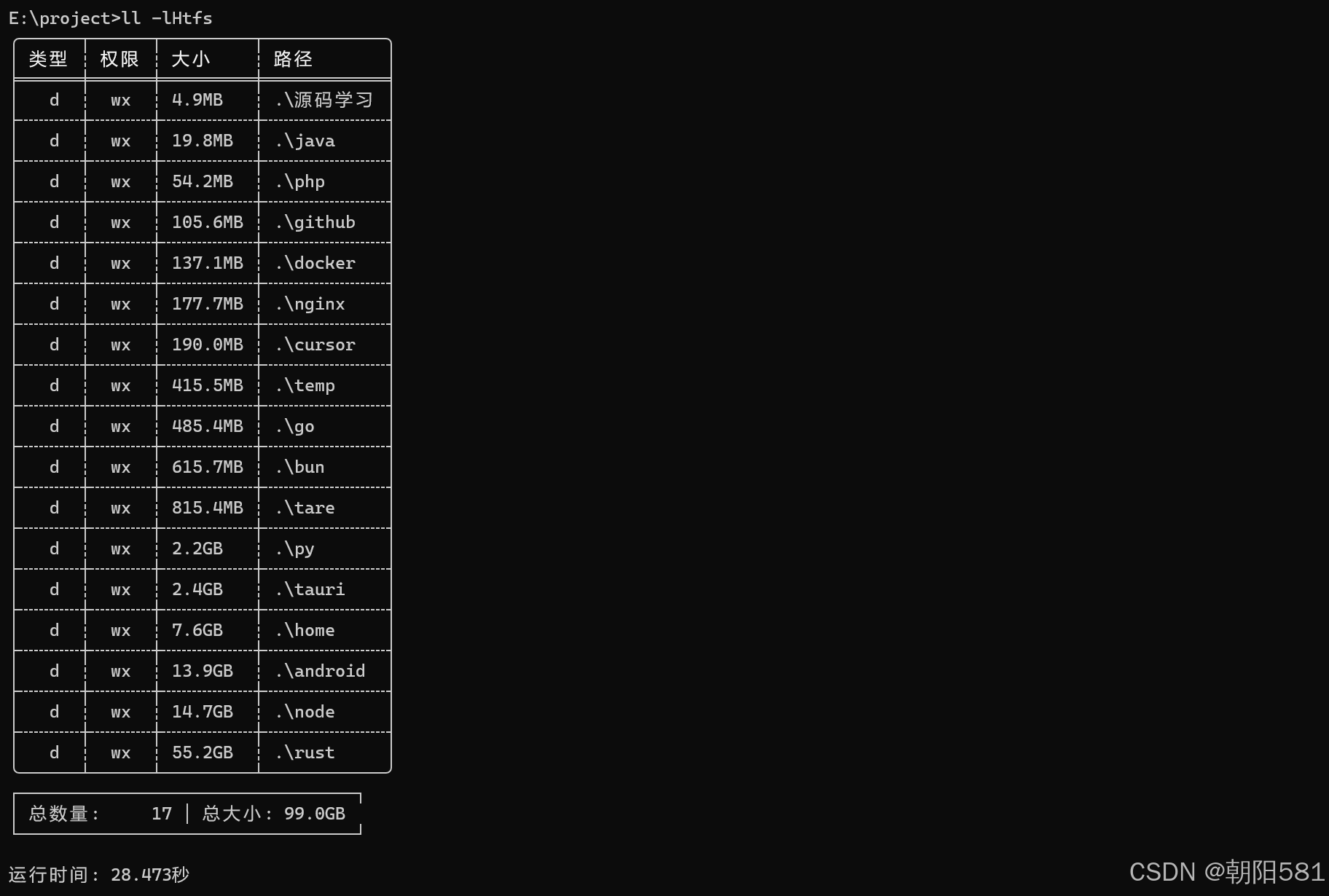
Rust实现高性能目录扫描工具ll的技术解析
Rust实现高性能目录扫描工具ll的技术解析 一、项目概述 本项目使用Rust构建了一个类ls命令行工具,具备以下核心特性: 多格式文件信息展示并行目录扫描加速人类可读文件大小运行时性能统计交互式进度提示 二、技术架构 1. 关键技术栈 clapÿ…...

深入理解C语言变量:从基础到实践
在编程世界中,变量是最基础也是最重要的概念之一。作为C语言的核心组成部分,变量承载着程序运行时数据的存储和传递功能。理解变量的工作原理和正确使用方法,是成为一名合格C程序员的必经之路。本文将全面介绍C语言变量的各个方面,…...

深入解析 SMB 相关命令:smbmap、smbclient、netexec 等工具的使用指南
Server Message Block(SMB)协议是广泛应用于文件共享、打印机共享和进程间通信的网络协议,尤其在 Windows 环境中常见。渗透测试和网络安全审计中,SMB 是一个重要的攻击面,相关工具如 smbmap、smbclient 和 netexec 提…...
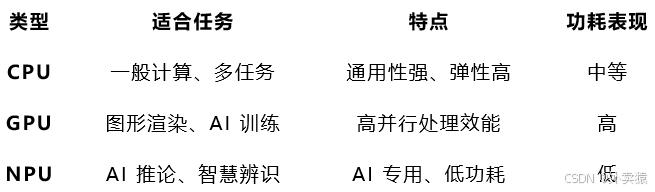
RK3562/3588 系列之0—NPU基础概念
RK3562/3588 系列之0—NPU基础概念 1.处理器分类2.算力衡量指标TOPS参考文献 1.处理器分类 中央处理器(CPU); 图形处理器 (GPU); 神经网络处理器(NPU)。 每个处理器擅长不同的任务:CPU擅长顺序控制和即时性;GPU适合并行数据流处理,NPU擅长…...

springboot如何管理多数据源?
静态多数据源管理 配置多个数据源 :创建多个数据源的配置类,通常使用 @ConfigurationProperties 注解来绑定配置文件中的数据源属性,并通过 @Bean 注解定义多个 DataSource Bean 。例如: 配置类: @Configuration public class DataSourceConfig {@Bean(name = "prima…...

为什么vue的key值,不用index?
在 Vue 中,key 的作用是帮助框架高效地识别和复用 DOM 节点或组件实例。使用数组索引 (index) 作为 key 值可能会导致以下问题,因此通常不建议这样做: 1. 列表数据变化时,可能导致错误的 DOM 复用 问题:当列表的顺序…...
canvas画板!随意画!!
希望你天天开心 代码: <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>绘画板</title…...
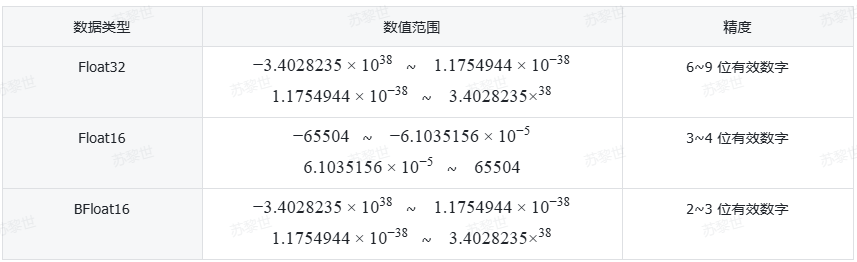
Float32、Float16、BFloat16
我们先介绍 Float32、Float16、BFloat16 的 浮点数表示方法 然后根据浮点数表示,来分析总结他们是怎么控制 精度和 数值范围 的 最后再来对比的说明 Float32、Float16、BFloat16 的 应用场景 和 硬件支持 1、浮点数的表示方法 Float32 : 单精度浮点数…...
C# new Bitmap(32043, 32043, PixelFormat.Format32bppArgb)报错:参数无效,如何将图像分块化处理?
C#处理非常大的图像(如 32043x32043 像素)时,确实需要采取分块化处理的方法来避免内存不足的问题。分块化处理可以将大图像分割成多个较小的块,分别进行处理和保存,最后再合并这些块以形成完整的图像。以下是一个详细的…...

5V 1A充电标准的由来与技术演进——从USB诞生到智能手机时代的电力革命
点击下面图片带您领略全新的嵌入式学习路线 🔥爆款热榜 88万阅读 1.6万收藏 一、起源:USB标准与早期电力传输需求 1. USB的诞生背景 1996年,由英特尔、微软、IBM等公司组成的USB-IF(USB Implementers Forum)发布了…...

微信小程序蓝牙连接打印机打印单据完整Demo【蓝牙小票打印】
文章目录 一、准备工作1. 硬件准备2. 开发环境 二、小程序配置1. 修改app.json 三、完整代码实现1. pages/index/index.wxml2. pages/index/index.wxss3. pages/index/index.js 四、ESC/POS指令说明五、测试流程六、常见问题解决七、进一步优化建议 下面我将提供一个完整的微信…...

龙虎榜——20250425
指数依然在震荡,等待方向选择,整体量能不搞但个股红多绿少。 2025年4月25日龙虎榜行业方向分析 一、核心主线方向 绿色电力(政策驱动业绩弹性) • 代表标的:华银电力(绿电运营)、西昌电力&…...