2:QT联合HALCON编程—图像显示放大缩小
1.声明事件
#include <HalconCpp.h>
using namespace HalconCpp;#include <QCloseEvent>//滚轮事件2.在.h文件中声明和定义公共全局变量,以及图像缩放的函数
void wheelEvent(QWheelEvent *event);//定义函数HTuple wcRow0, wcRow1, wcCol0, wcCol1,m_objImage;bool GunLunFlag = false;HObject ho_Image;
3.在.cpp文件中,构造函数中
GunLunFlag = true; //变量变为14.在.cpp的函数中开始定义
使用此函数时,需要替换窗口名和图像名。(如果在别处也需要使用这两个变量,所以才把这些变量声明到全局变量中去)
HTuple hv_WindowHandle; //公共窗口 大家都会去使用 全局作用域(在联合编程1节里面有提到)
//滚轮事件函数
void MainWindow::wheelEvent(QWheelEvent *event)
{if(ui->gvDepthMap->geometry().contains(this->mapFromGlobal(QCursor::pos()))){//resizeImage();SetWindowExtents(hv_hv_WindowHandle, 0, 0, ui->gvDepthMap->width(), ui->gvDepthMap->height());try{if (GunLunFlag == true){QPoint pos = event->pos();HTuple Row0_1, Col0_1, Row1_1, Col1_1;HTuple ImagePtX, ImagePtY;QRect WndRect;double Scale = 0.1;HTuple Width, Height;GetImageSize(ho_Image, &Width, &Height);WndRect = QRect(QPoint(0, 0), QPoint(ui->gvDepthMap->width(), ui->gvDepthMap->height()));if (WndRect.contains(event->pos())){if (event->delta() > 0){ImagePtX = wcCol0 + (pos.x() - WndRect.left()) / (WndRect.width() - 1.0) * (wcCol1 - wcCol0);ImagePtY = wcRow0 + (pos.y() - WndRect.top()) / (WndRect.height() - 1.0) * (wcRow1 - wcRow0);Row0_1 = ImagePtY - 1 / (1 - Scale) * (ImagePtY - wcRow0);Row1_1 = ImagePtY - 1 / (1 - Scale) * (ImagePtY - wcRow1);Col0_1 = ImagePtX - 1 / (1 - Scale) * (ImagePtX - wcCol0);Col1_1 = ImagePtX - 1 / (1 - Scale) * (ImagePtX - wcCol1);wcRow0 = Row0_1;wcCol0 = Col0_1;wcRow1 = Row1_1;wcCol1 = Col1_1;if (wcRow0 < 0 || wcCol0 < 0){wcRow0 = 0;wcCol0 = 0;wcRow1 = Height;wcCol1 = Width;}ClearWindow(hv_hv_WindowHandle);SetPart(hv_hv_WindowHandle, wcRow0, wcCol0, wcRow1, wcCol1);DispObj(ho_Image, hv_hv_WindowHandle);}else{ImagePtX = wcCol0 + (pos.x() - WndRect.left()) / (WndRect.width() - 1.0) * (wcCol1 - wcCol0);ImagePtY = wcRow0 + (pos.y() - WndRect.top()) / (WndRect.height() - 1.0) * (wcRow1 - wcRow0);Row0_1 = ImagePtY - 1 / (1 + Scale) * (ImagePtY - wcRow0);Row1_1 = ImagePtY - 1 / (1 + Scale) * (ImagePtY - wcRow1);Col0_1 = ImagePtX - 1 / (1 + Scale) * (ImagePtX - wcCol0);Col1_1 = ImagePtX - 1 / (1 + Scale) * (ImagePtX - wcCol1);wcRow0 = Row0_1;wcCol0 = Col0_1;wcRow1 = Row1_1;wcCol1 = Col1_1;}ClearWindow(hv_hv_WindowHandle);SetPart(hv_hv_WindowHandle, wcRow0, wcCol0, wcRow1, wcCol1);DispObj(ho_Image, hv_hv_WindowHandle);}}}catch(...){// ui->(可以添加界面框显示内容)return;}}
}
已经看到这里了,不妨点个赞和关注吧!
刚开始写文章,如有不足请多多包含;之后会持续更新关于(halcon学习,VS联合编程,QT联合编程,C++,C#,Opencv图像处理库,三维点云库pcl,相机以及机器人的二次开发)等系统化学习文章。
相关文章:

2:QT联合HALCON编程—图像显示放大缩小
1.声明事件 #include <HalconCpp.h> using namespace HalconCpp;#include <QCloseEvent>//滚轮事件 2.在.h文件中声明和定义公共全局变量,以及图像缩放的函数 void wheelEvent(QWheelEvent *event);//定义函数HTuple wcRow0, wcRow1, wcCol0, wcCol1,m…...

Java 队列与阻塞队列全面解析:从 Queue 到 TransferQueue 的实现与应用
文章目录 Queue队列QueueDeque 阻塞队列BlockingQueueArrayBlockingQueueLinkedBlockingQueuePriorityBlockingQueueSynchronousQueueDelayQueue BlockingDequeLinkedBlockingDeque TransferQueueLinkedTransferQueue Queue Queue(队列)是一种特殊的线性…...

服务器虚拟化:技术解析与实践指南
在信息技术飞速发展的今天,企业对服务器资源的需求日益增长,传统物理服务器存在资源利用率低、部署周期长、管理成本高等问题。服务器虚拟化技术应运而生,它通过将物理服务器的计算、存储、网络等资源进行抽象和整合,划分成多个相互隔离的虚拟服务器,从而提高资源利用率、…...

【蓝桥杯省赛真题56】Scratch抓不住的蜜蜂 蓝桥杯scratch图形化编程 中小学生蓝桥杯省赛真题讲解
目录 scratch抓不住的蜜蜂 一、题目要求 1、准备工作 2、功能实现 二、案例分析 1、角色分析 2、背景分析 3、前期准备 三、解题思路 四、程序编写 五、考点分析 六、推荐资料 1、scratch资料 2、python资料 3、C++资料 scratch抓不住的蜜蜂 第十五届青少年蓝桥…...
:深入剖析synchronized关键字的底层原理)
线程池(二):深入剖析synchronized关键字的底层原理
线程池(二):深入剖析synchronized关键字的底层原理 线程池(二):深入剖析synchronized关键字的底层原理一、基本使用1.1 修饰实例方法1.2 修饰静态方法1.3 修饰代码块 二、Monitor2.1 Monitor的概念2.2 Moni…...

【线段树】P8539 「Wdoi-2」来自地上的支援|普及+
P8539 「Wdoi-2」来自地上的支援 题目背景 波光粼粼的山顶湖与庄严神圣的神社之下,是一座复合型活火山。 沿幻想风穴而下,便能到达火山之下,废弃已久的地狱原址。 在旧地狱中,有一座大都市。那里是旧地狱还是地狱的时候在那工作…...
《TCP/IP详解 卷1:协议》之第七、八章:Ping Traceroute
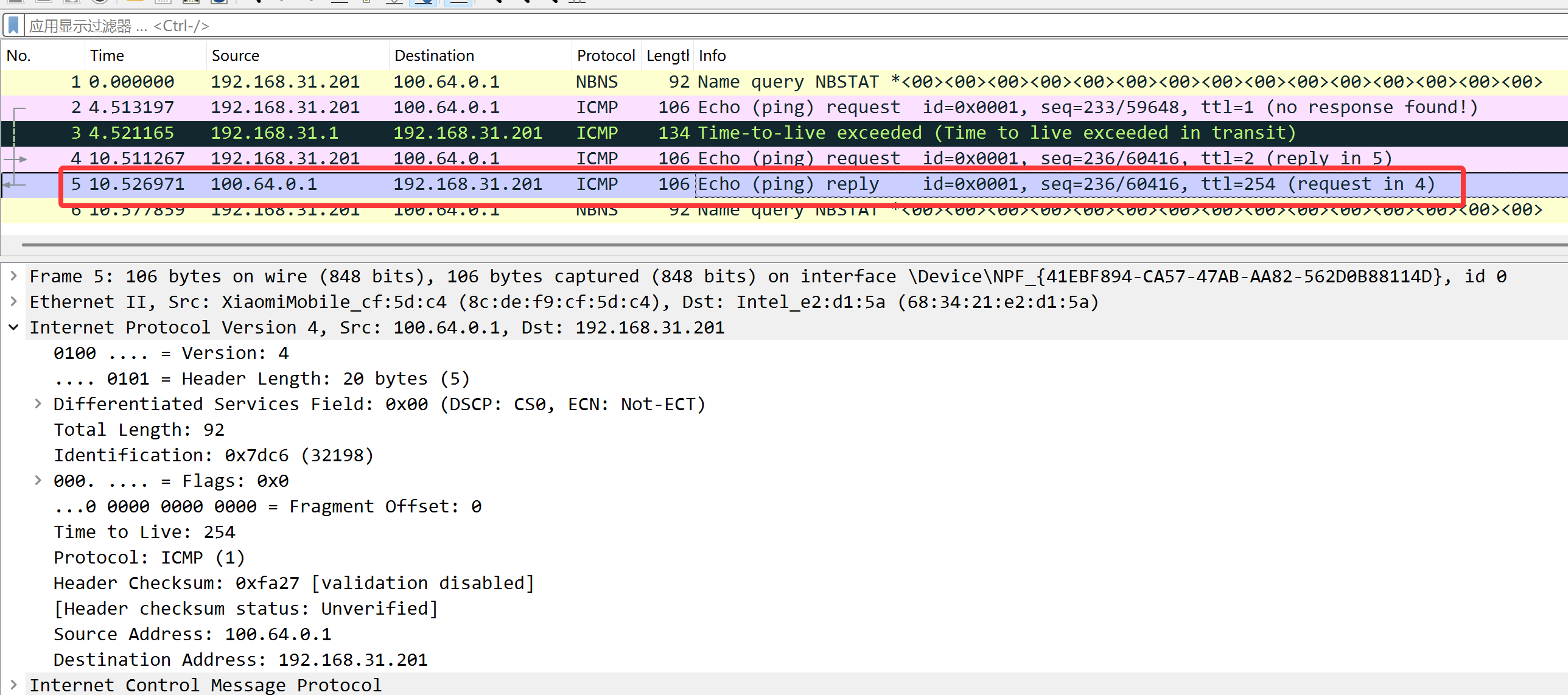
目录 一、ICMP回显请求和回显应答 1、ICMP回显请求 2、ICMP回显应答 二、ARP高速缓存 三、IP记录路由选项(Record Route,RR) 1、记录路由选项的工作过程 2、RR 选项的 IP 头部格式 2.1、RR 请求 2.2、RR响应 四、ping 的去返路径 五…...

Leetcode:1. 两数之和
题目 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答案,并且你不能使用两次相同的元素。 你可以按任意顺序返回答案。 示…...

【Java学习笔记】冒泡排序
冒泡排序 思想:经过一轮遍历比较,把最大的放在数组的末尾 int[] a {3, 2, 1}; for( int i 0; i < a.length-1; i){for( int j 0; j < a.length-1-i; j){if(a[j] > a[j1]){int temp a[j];a[j] a[j1];a[j1] temp;}} } for( int i 0; i &…...
)
【数字图像处理】立体视觉基础(2)
相机标定 【1】相机标定的概念 相机参数:相机成像的几何模型的参数 相机标定:求解参数的过程 【2】相机标定的作用 (1)求出相机的内、外参数,以及畸变参数 (2)校正镜头畸变影响,…...
NtripShare 2025第一季度主要技术进展
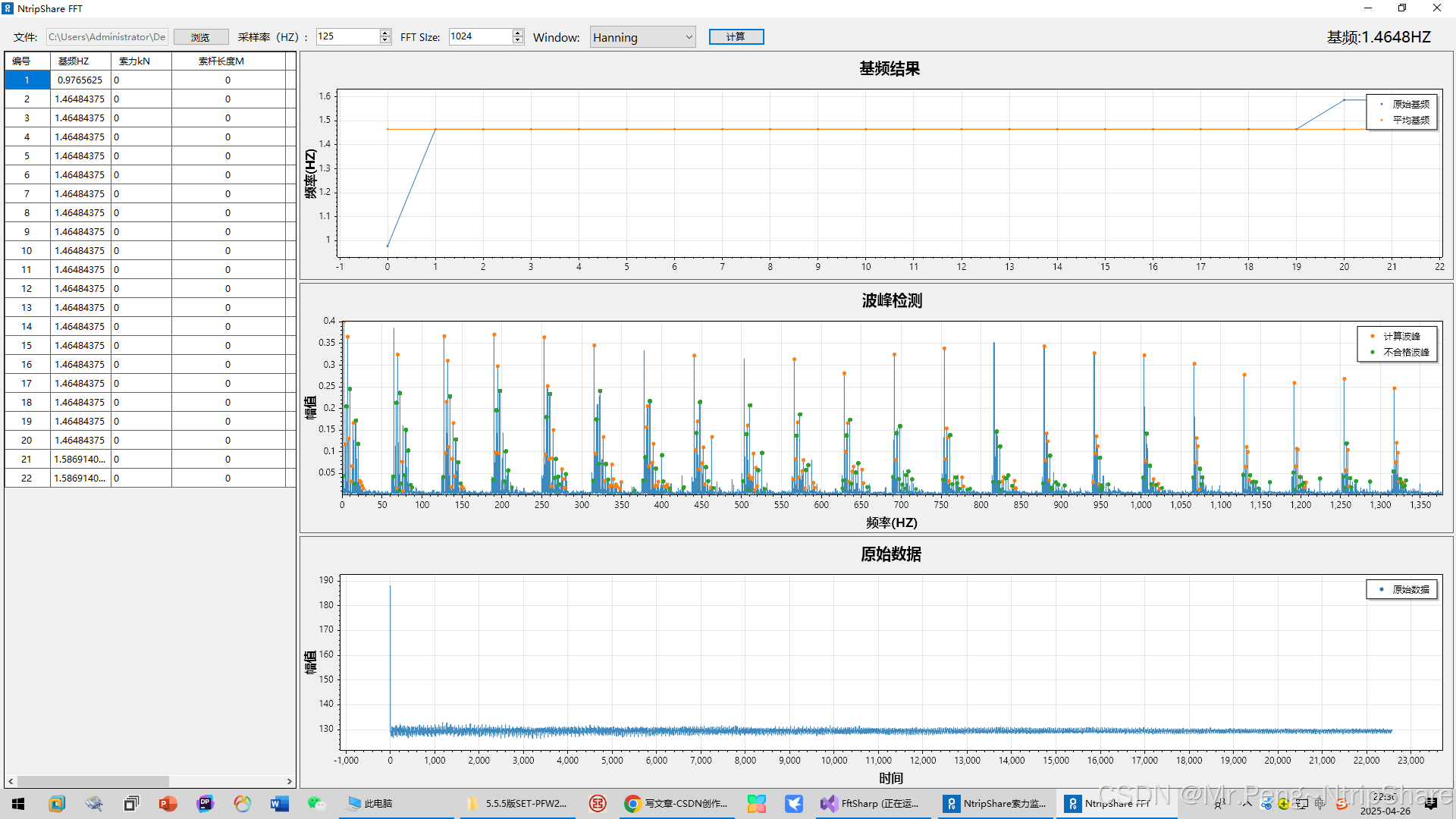
GNSS方面 1、开源GNSS接收机配置软件基础版本。 2、商业版本GNSS接收机配置软件,增加PPP、文件保存、前端解算(静态、RTK-Static),前端坐标转换。 3、GNSS接收机配置软件全面适配米尔T133i硬件方案。 视觉检测方面 1、做出第…...
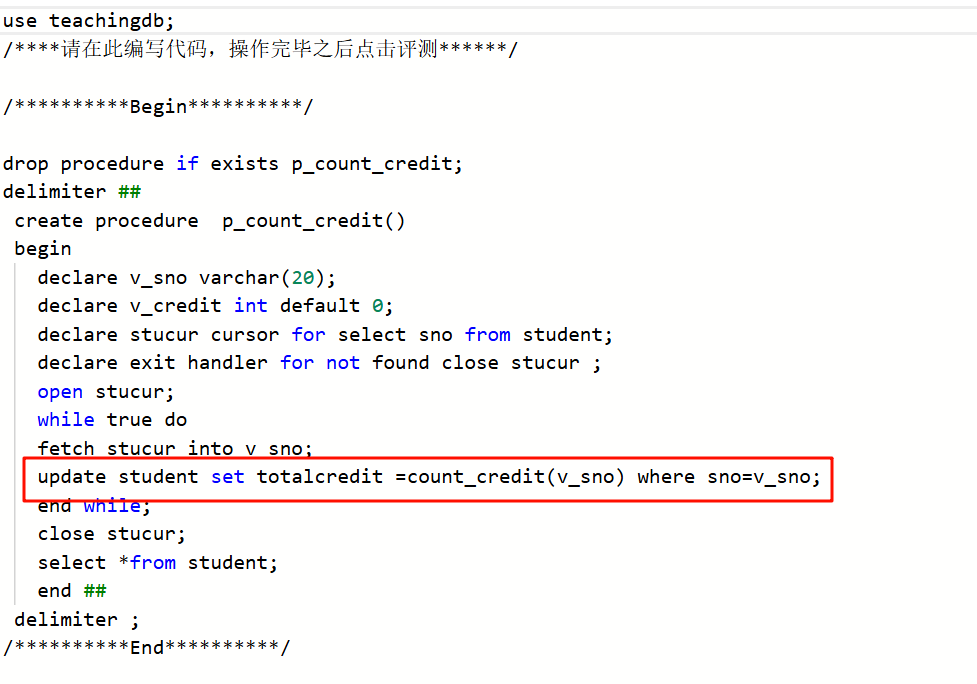
头歌实训之存储过程、函数与触发器
🌟 各位看官好,我是maomi_9526! 🌍 种一棵树最好是十年前,其次是现在! 🚀 今天来学习C语言的相关知识。 👍 如果觉得这篇文章有帮助,欢迎您一键三连,分享给更…...
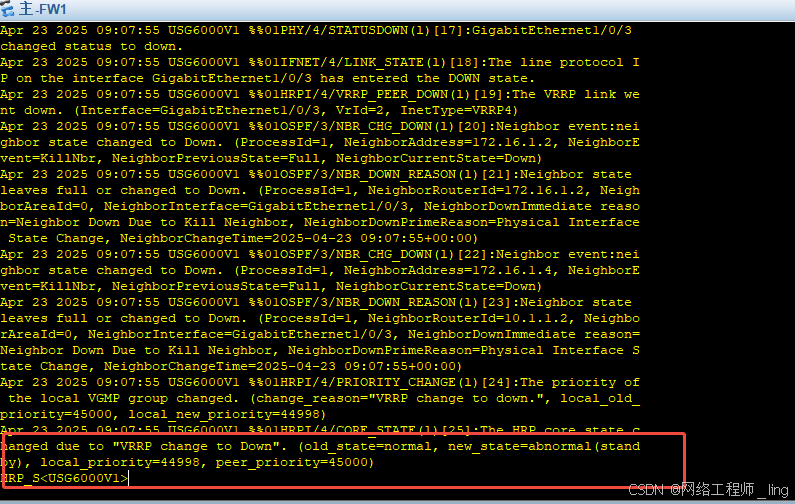
【华为】防火墙双击热备-之-主备模式-单外网线路-分享
FW1和FW2的业务接口都工作在三层,上行连接二层交换机。上行交换机连接运营商的接入点,运营商为企业分配的IP地址为100.100.100.2。现在希望FW1和FW2以主备备份方式工作。正常情况下,流量通过FW1转发;当FW1出现故障时,流…...

c++ package_task
int print_sum(int a, int b) {std::cout << a << " " << b << " " << (a b) << std::endl;return a b; }int main() {// 创建绑定后的可调用对象auto print_sum_5 std::bind(print_sum, 5, 6);// 包装为 packag…...

基于计算机视觉的行为检测:从原理到工业实践
一、行为检测的定义与核心价值 行为检测(Action Recognition)是计算机视觉领域的关键任务,旨在通过分析视频序列理解人类动作的时空特征。其核心价值体现在时序建模和多尺度分析能力上——系统需要捕捉动作的起始、发展和结束全过程,同时适应不同持续时间(0.1秒至数分钟)…...

川翔云电脑32G大显存集群机器上线!
川翔云电脑今日重磅推出32G 大显存机型,为游戏玩家、设计师、AI 开发者等提供极致云端算力体验! 一、两大核心配置,突破性能天花板 ✅ 32G 超大显存机型 行业领先:搭载 NVIDIA 专业显卡,单卡可分配 32G 独立显存&am…...
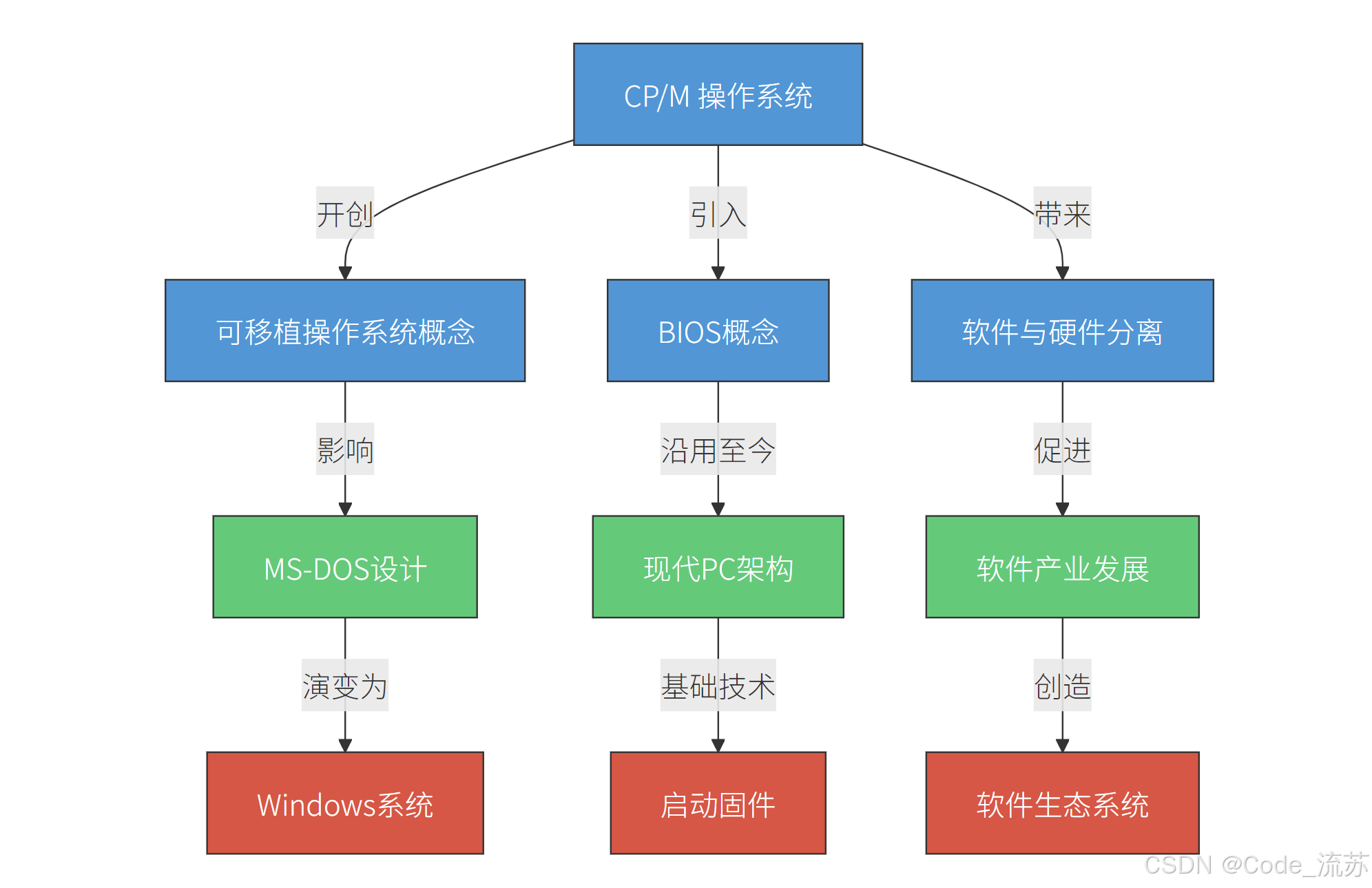
加里·基尔代尔:CP/M之父与个人计算时代的先驱
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 加里基尔代尔:CP/M之父与个人计算时代的先驱 一、早年生活与教育背景 1.…...
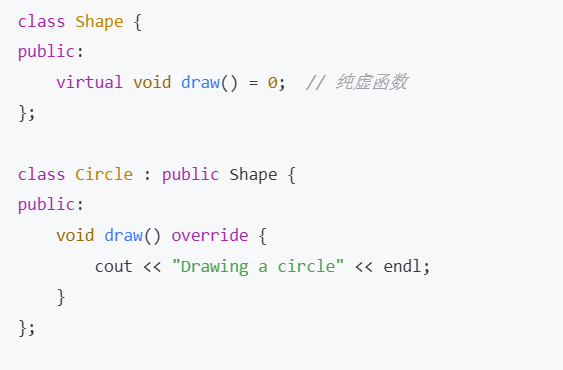
静态多态和动态多态的区别
C多态机制深度解析 多态是面向对象编程的核心特性,允许通过统一接口执行不同实现。在C中,多态表现为基类指针或引用调用虚函数时,根据实际对象类型执行对应派生类的函数逻辑。 基础实现示例 定义基类与派生类,演示动态绑定…...

MQL5教程 06 EA开发实战
文章目录 一、调用多指标多周期EA示例二、获取ZigZag顶点值三、逆势加仓EA 一、调用多指标多周期EA示例 shuju.mqh: class shuju{public:shuju(){} ~shuju(){}void MA(double &ma[],int count,string symbol, // 交易品种名称 ENUM_TIMEFRA…...

LLaMa Factory大模型微调
LLaMa Factory大模型微调 大模型微调平台&硬件LLaMA-Factory安装hfd下载hugging face模型自我认知微调Alpaca数据集指令监督微调断点续训 大模型微调 微调自我认知微调特定领域数据集。 平台&硬件 Ubuntu20.04显卡:M40 24G 2080TI 22G微调框架ÿ…...
Burp靶场JWT学习笔记1
JWT(JSON Web Token) 从其名字就可以看出来,它具有表示身份的作用,其本质是将用户信息储存到一串json字符串中再将其编码得到一串token JWT由三部分组成,分别是 Header,Payload,Signatrue JWTBase64(Header).Base6…...
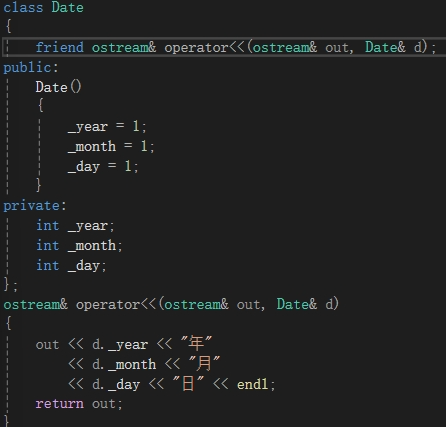
C++?类和对象(下)!!!
一、前言 在之前我们已经讨论过了有关类和对象的前置知识以及类中的六大默认成员函数,在本期我们继续再讨论类和对象中剩余的友元、初始化列表等相关知识,如果需要再了解之前的知识的话,链接奉上:C?类和对象࿰…...
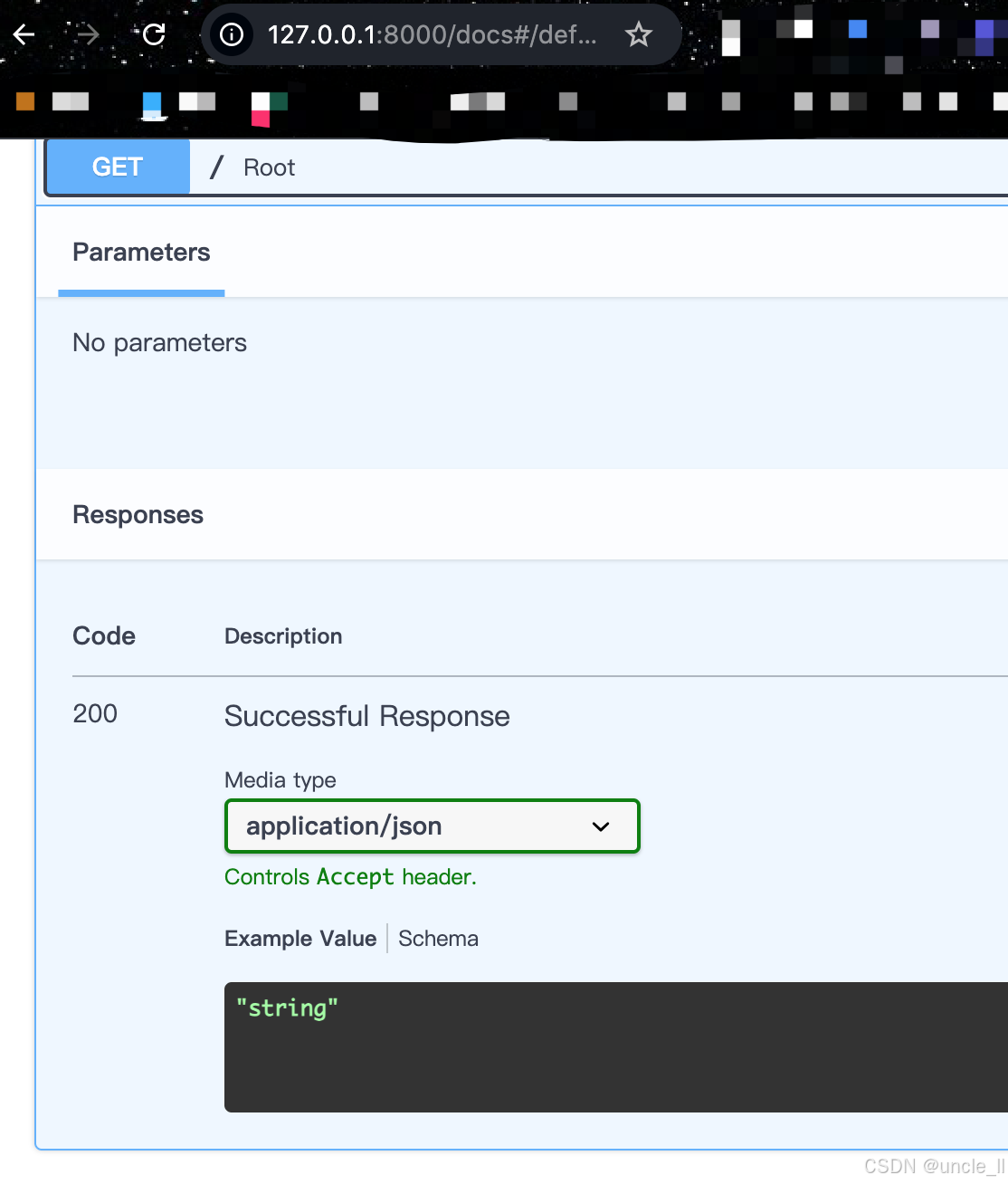
FastAPI 零基础入门指南:10 分钟搭建高性能 API
一、为什么选择 FastAPI? 想象一下,用 Python 写 API 可以像搭积木一样简单,同时还能拥有媲美 Go 语言的性能,这个框架凭借三大核心优势迅速风靡全球: 开发效率提升 3 倍:类型注解 自动文档,…...

prometheus通过Endpoints自定义grafana的dashboard模块
1、prometheus自定义的dashboard模块 文件路径/etc/prometheus/config_out/prometheus-env.yaml - job_name: serviceMonitor/monitoring/pfil/0honor_labels: falsekubernetes_sd_configs:- role: endpointsnamespaces:names:- monitoringrelabel_configs:- source_labels:- …...

机器人新革命:Pi 0.5如何让智能走进千家万户
在科技飞速发展的今天,机器人技术正在以一种令人惊喜的方式贴近我们的生活。最近,Physical Intelligence 公司推出了 Pi 0.5 版本,这一创新设计不仅颠覆了传统机器人的运作模式,更让我们看到了未来智能设备融入日常生活的无限可能…...

std::mutex底层实现原理
std::mutex是一个用于实现互斥访问的类,其具备两个成员函数——lock和unlock 锁的底层实现原理 锁的底层实现是基于原子操作的,这些原子操作是由指令支持的,因为单个指令是不能被中断的 一些与锁的实现有关的原子指令为: 待补充…...

从数据结构说起(一)
1 揭开数据结构神奇的面纱 1.1 初识数据结构 在C的标准库模板(Standard Template Library,STL)课程上,我初次结识了《数据结构》。C语言提供的标准库模板是面向对象程序设计与泛型程序设计思想相结合的典范。所谓的泛型编程就是编写不依赖于具…...

【后端】构建简洁的音频转写系统:基于火山引擎ASR实现
在当今数字化时代,语音识别技术已经成为许多应用不可或缺的一部分。无论是会议记录、语音助手还是内容字幕,将语音转化为文本的能力对提升用户体验和工作效率至关重要。本文将介绍如何构建一个简洁的音频转写系统,专注于文件上传、云存储以及…...

矫平机终极指南:特殊材料处理、工艺链协同与全球供应链管理
一、特殊材料矫平:挑战与创新解决方案 1. 高温合金(如Inconel 718)处理 技术难点: 屈服强度高达1100 MPa,传统矫平力不足 高温下易氧化,需惰性气体保护环境 解决方案: 采用双伺服电机驱动&a…...

云服务器 —— 公有 IP 与 私有 IP
云服务器的 公有 IP 和 私有 IP 在网络架构中扮演不同的角色,具体用途和区别如下: 目录 1. 公有 IP(Public IP) 作用: 特点: 示例场景: 2. 私有 IP(Private IP) 作用…...