MuJoCo 关节角速度记录与可视化,监控机械臂运动状态
视频讲解:
MuJoCo 关节角速度记录与可视化,监控机械臂运动状态
代码仓库:GitHub - LitchiCheng/mujoco-learning
关节空间的轨迹优化,实际上是对于角速度起到加减速规划的控制,故一般来说具有该效果的速度变化会显得丝滑一些,不会那么生硬,这里我们结合评论区的疑问,将关节速度进行记录及可视化,可以比较直观的看到关节速度,下面通过两种方式计算关节速度:
1. 手动计算关节速度,其中timestep为仿真步长
calc_qvel = (self.last_qpos - self.q_vec[:7, self.index]) / self.model.opt.timestep2. 使用data.qvel直接取得关节速度
self.joint_velocities[self.index] = self.data.qvel[:7]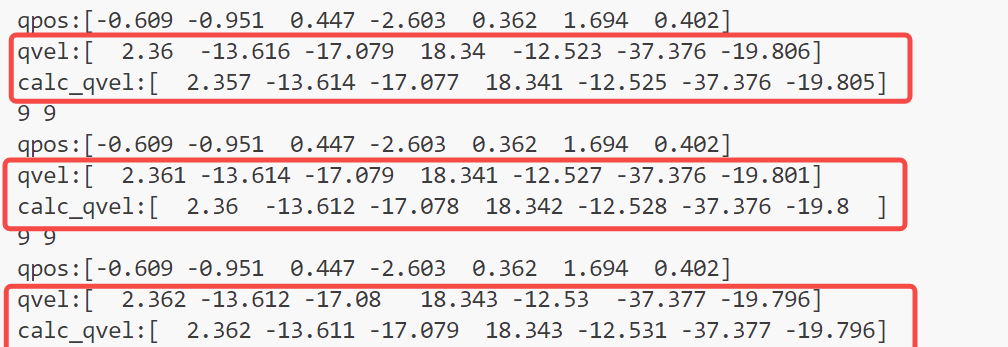
两种方式计算出的关节速度基本一致,如下为完整代码:
import mujoco_viewer
import mujoco,time,threading
import numpy as np
import pinocchio
import matplotlib
# matplotlib.use('TkAgg')
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import itertoolsfrom pyroboplan.core.utils import (get_random_collision_free_state,extract_cartesian_poses,
)
from pyroboplan.ik.differential_ik import DifferentialIk, DifferentialIkOptions
from pyroboplan.ik.nullspace_components import (joint_limit_nullspace_component,collision_avoidance_nullspace_component,
)from pyroboplan.models.panda import (load_models,add_self_collisions,add_object_collisions,
)
from pyroboplan.planning.rrt import RRTPlanner, RRTPlannerOptions
from pyroboplan.trajectory.trajectory_optimization import (CubicTrajectoryOptimization,CubicTrajectoryOptimizationOptions,
)class Test(mujoco_viewer.CustomViewer):def __init__(self, path):super().__init__(path, 3, azimuth=180, elevation=-30)self.path = pathdef runBefore(self):# Create models and dataself.model_roboplan, self.collision_model, visual_model = load_models(use_sphere_collisions=True)add_self_collisions(self.model_roboplan, self.collision_model)add_object_collisions(self.model_roboplan, self.collision_model, visual_model, inflation_radius=0.1)data = self.model_roboplan.createData()collision_data = self.collision_model.createData()self.target_frame = "panda_hand"ignore_joint_indices = [self.model_roboplan.getJointId("panda_finger_joint1") - 1,self.model_roboplan.getJointId("panda_finger_joint2") - 1,]np.set_printoptions(precision=3)# Set up the IK solveroptions = DifferentialIkOptions(max_iters=200,max_retries=10,damping=0.0001,min_step_size=0.05,max_step_size=0.1,ignore_joint_indices=ignore_joint_indices,rng_seed=None,)self.ik = DifferentialIk(self.model_roboplan,data=data,collision_model=self.collision_model,options=options,visualizer=None,)self.nullspace_components = [lambda model_roboplan, q: collision_avoidance_nullspace_component(model_roboplan,data,self.collision_model,collision_data,q,gain=1.0,dist_padding=0.05,),lambda model_roboplan, q: joint_limit_nullspace_component(model_roboplan, q, gain=1.0, padding=0.025),]theta = np.pirotation_matrix = np.array([[1, 0, 0],[0, np.cos(theta), -np.sin(theta)],[0, np.sin(theta), np.cos(theta)]])q_start = self.getIk(self.random_valid_state(), rotation_matrix, [0.4, 0.0, 0.4])q_goal = self.getIk(self.random_valid_state(), rotation_matrix, [0.3, 0.0, 0.5])while True:# Search for a pathoptions = RRTPlannerOptions(max_step_size=0.05,max_connection_dist=0.5,rrt_connect=False,bidirectional_rrt=False,rrt_star=True,max_rewire_dist=0.5,max_planning_time=5.0,fast_return=True,goal_biasing_probability=0.25,collision_distance_padding=0.0001,)print("")print(f"Planning a path...")planner = RRTPlanner(self.model_roboplan, self.collision_model, options=options)q_path = planner.plan(q_start, q_goal)print(f"Path found with {len(q_path)} waypoints")if q_path is not None and len(q_path) > 0:print(f"Got a path with {len(q_path)} waypoints")if len(q_path) > 50:print("Path is too long, skipping...")continueelse:print("Failed to plan.")# Perform trajectory optimization.# self.model.opt.timestep = 0.1dt = self.model.opt.timestepoptions = CubicTrajectoryOptimizationOptions(num_waypoints=len(q_path),samples_per_segment=1,min_segment_time=0.5,max_segment_time=10.0,min_vel=-1.5,max_vel=1.5,min_accel=-0.75,max_accel=0.75,min_jerk=-1.0,max_jerk=1.0,max_planning_time=1.0,check_collisions=False,min_collision_dist=0.001,collision_influence_dist=0.05,collision_avoidance_cost_weight=0.0,collision_link_list=["obstacle_box_1","obstacle_box_2","obstacle_sphere_1","obstacle_sphere_2","ground_plane","panda_hand",],)print("Optimizing the path...")optimizer = CubicTrajectoryOptimization(self.model_roboplan, self.collision_model, options)traj = optimizer.plan([q_path[0], q_path[-1]], init_path=q_path)if traj is None:print("Retrying with all the RRT waypoints...")traj = optimizer.plan(q_path, init_path=q_path)if traj is not None:print("Trajectory optimization successful")traj_gen = traj.generate(dt)self.q_vec = traj_gen[1]print(f"path has {self.q_vec.shape[1]} points")self.tforms = extract_cartesian_poses(self.model_roboplan, "panda_hand", self.q_vec.T)self.plot(self.tforms)self.joint_velocities = np.zeros((self.q_vec.shape[1], 7))breakself.index = 0self.last_qpos = self.data.qpos[:7]def plot(self, tfs):positions = []for tform in tfs:position = tform.translationpositions.append(position)positions = np.array(positions)fig = plt.figure()ax = fig.add_subplot(111, projection='3d')ax.plot(positions[:, 0], positions[:, 1], positions[:, 2], marker='o')ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')plt.show(block=False)plt.pause(0.001)def getIk(self, init_state, rotation_matrix, pose):while True:self.init_state = init_statetarget_tform = pinocchio.SE3(rotation_matrix, np.array(pose))q_sol = self.ik.solve(self.target_frame,target_tform,init_state=self.init_state,nullspace_components=self.nullspace_components,verbose=True,)if q_sol is not None:print("IK solution found")return q_soldef random_valid_state(self):return get_random_collision_free_state(self.model_roboplan, self.collision_model, distance_padding=0.001)def runFunc(self):calc_qvel = (self.last_qpos - self.q_vec[:7, self.index]) / self.model.opt.timestepself.data.qpos[:7] = self.q_vec[:7, self.index]self.last_qpos = self.data.qpos[:7] print(f"qpos:{self.data.qpos[:7]}") print(f"qvel:{self.data.qvel[:7]}")print(f"calc_qvel:{calc_qvel}")print(self.model.nv, self.model.nq)self.joint_velocities[self.index] = self.data.qvel[:7]self.index += 1if self.index >= self.q_vec.shape[1]:self.index = 0time_steps = np.arange(self.q_vec.shape[1])fig, axes = plt.subplots(7, 1, figsize=(10, 10))for j in range(7):axes[j].plot(time_steps, self.joint_velocities[:, j], label=f'Joint {j + 1}', color=f'C{j}')axes[j].set_ylabel('Angular Velocity (rad/s)')axes[j].set_title(f'Joint {j + 1} Angular Velocity')axes[j].grid(True)axes[j].legend()plt.tight_layout()plt.show()if __name__ == "__main__":test = Test("./franka_emika_panda/scene.xml")test.run_loop()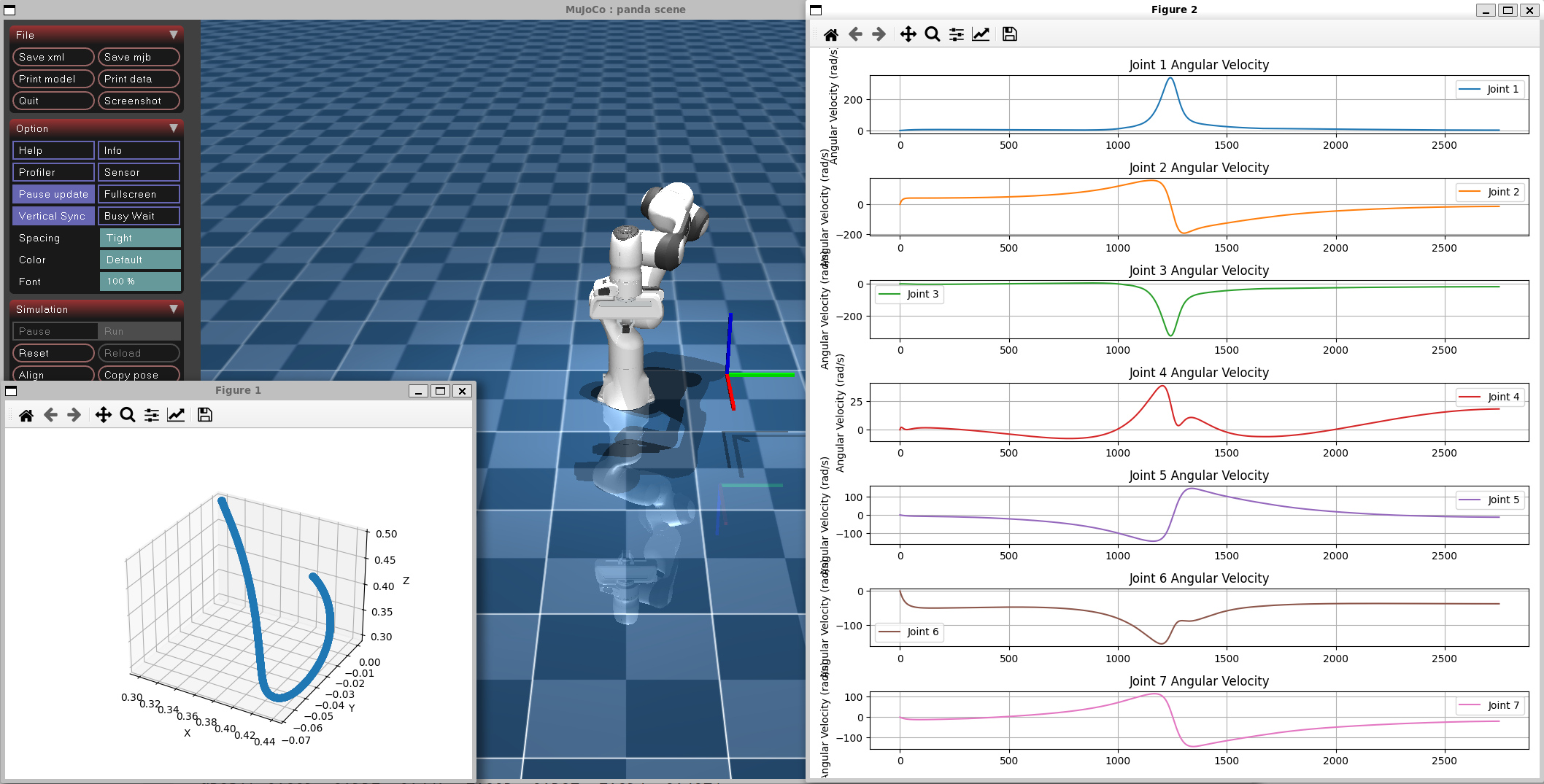
相关文章:
MuJoCo 关节角速度记录与可视化,监控机械臂运动状态
视频讲解: MuJoCo 关节角速度记录与可视化,监控机械臂运动状态 代码仓库:GitHub - LitchiCheng/mujoco-learning 关节空间的轨迹优化,实际上是对于角速度起到加减速规划的控制,故一般来说具有该效果的速度变化会显得丝…...
:剖析用户价值与商业模式拼图)
精益数据分析(27/126):剖析用户价值与商业模式拼图
精益数据分析(27/126):剖析用户价值与商业模式拼图 在创业和数据分析的领域中,每一次深入学习都是一次成长的契机。今天,我们继续秉持共同进步的理念,深入研读《精益数据分析》,剖析用户价值的…...

Neo4j 常用查询语句
Neo4j 常用查询语句 Neo4j 是一个图数据库,查询语言是 Cypher,它类似于 SQL 但针对图形数据进行了优化。Cypher 语法直观易懂,适合用来处理图数据。本文将介绍一些 Neo4j 中常用的查询语句,帮助你快速掌握图数据的操作方法。 一…...
LVGL模拟器:NXP GUIDER+VSCODE
1. 下载安装包 NXP GUIDER:GUI Guider | NXP 半导体 CMAKE:Download CMake MINGW:https://github.com/niXman/mingw-builds-binaries/releases SDL2:https://github.com/libsdl-org/SDL/releases/tag/release-2.30.8 VSCODE&…...
《USB技术应用与开发》第四讲:实现USB鼠标
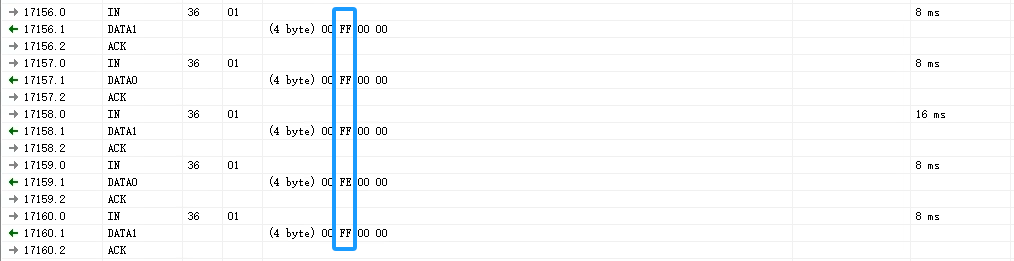
一、标准鼠标分析 1.1简介 1.2页面显示 其中页面显示的“”不用管它,因为鼠标作为物理抓包,里面有时候会抓到一些错误,不一定是真正的通讯错误,很可能是本身线路接触质量不好等原因才打印出来的“”。 1.3按下鼠标左键 &#x…...
一、鸿蒙编译篇
一、下载源码和编译 https://blog.csdn.net/xusiwei1236/article/details/142675221 https://blog.csdn.net/xiaolizibie/article/details/146375750 https://forums.openharmony.cn/forum.php?modviewthread&tid897 repo init -u https://gitee.com/openharmony/mani…...

DataStreamAPI实践原理——计算模型
引入 Apache Flink 是一个框架和分布式处理引擎,用于在 无边界 和 有边界 数据流上进行有状态的计 算。Flink 能在所有常见集群环境中运行,并能以内存速度和任意规模进行计算。Flink可以处理批数据也可以处理流数据,本质上,流处理…...
得物业务参数配置中心架构综述
一、背景 现状与痛点 在目前互联网飞速发展的今天,企业对用人的要求越来越高,尤其是后端的开发同学大部分精力都要投入在对复杂需求的处理,以及代码架构,稳定性的工作中,在对比下,简单且重复的CRUD就显得…...
【算法】单词搜索、最短距离
单词搜索 这道题主要考察了深度优先遍历(DFS)算法。 我们通过几个简单例子来分析一些细节问题: 1. 要搜索的单词串:abc 搜索的过程中必须按照字母顺序,首先从矩阵中的第一个元素开始搜索,遇到字母a则开始深度优先遍历࿰…...
Python函数基础:简介,函数的定义,函数的调用和传入参数,函数的返回值
目录 函数简介 函数定义,调用,传入参数,返回值 函数的定义 函数的调用和传入参数 函数的返回值 函数简介 函数简介:函数是组织好,可重复使用,用来实现特定功能(特定需求)的代码…...

基于FFmpeg命令行的实时图像处理与RTSP推流解决方案
前言 在一些项目开发过程中需要将实时处理的图像再实时的将结果展示出来,此时如果再使用一张一张图片显示的方式展示给开发者,那么图像窗口的反复开关将会出现窗口闪烁的问题,实际上无法体现出动态画面的效果。因此,需要使用码流…...

【随笔】地理探测器原理与运用
文章目录 一、作者与下载1.1 软件作者1.2 软件下载 二、原理简述2.1 空间分异性与地理探测器的提出2.2 地理探测器的数学模型2.21 分异及因子探测2.22 交互作用探测2.23 风险区与生态探测 三、使用:excel 一、作者与下载 1.1 软件作者 作者: DOI: 10.…...

【人工智能】Python中的深度学习模型部署:从训练到生产环境
《Python OpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门! 解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界 随着深度学习在各个领域的应用日益增多,如何将训练好的深度学习模型高效地部署到生产环境中,成为了开发者和数据科学家的重要课题。本文将…...

Rule.resource作用说明
1. 说明 作用 Rule.resource 用于定义哪些文件需要被当前规则处理。它是对传统 test、include、exclude 的更底层封装,支持更灵活的匹配方式。 与 test/include/exclude 的关系 test: /.js$/ 等价于resource: { test: /.js$/ } include: path.resolve(__dirname, ‘…...
来提高线程的复用率,减少线程创建和销毁的开销)
C++如何设计线程池(thread pool)来提高线程的复用率,减少线程创建和销毁的开销
线程池的基本概念与多线程编程中的角色 线程池,顾名思义,是一种管理和复用线程的资源池。它的核心思想在于预先创建一定数量的线程,并将这些线程保持在空闲状态,等待任务的分配。一旦有任务需要执行,线程池会从池中取出…...

从零开始使用SSH链接目标主机(包括Github添加SSH验证,主机连接远程机SSH验证)
添加ssh密钥(当前机生成和远程机承认) 以下是从头开始生成自定义名称的SSH密钥的完整步骤(以GitHub为例,适用于任何SSH服务): 1. 生成自定义名称的SSH密钥对 # 生成密钥对(-t 指定算法,-f 指定路径和名称…...
Maxscale实现Mysql的读写分离
介绍: Maxscale是mariadb开发的一个MySQL数据中间件,配置简单,能够实现读写分离,并且能根据主从状态实现写库的自动切换,对多个服务器实现负载均衡。 实验环境: 基于gtid的主从同步的基础上进行配置 中…...

以运营为核心的智能劳动力管理系统,破解连锁零售、制造业排班难题
在连锁零售、制造业、物流等劳动力密集型行业中,排班与考勤管理不仅是人力资源管理的核心环节,更是直接影响企业运营效率、成本控制与合规风险的关键场景。尤其在当前经济环境下,企业面临用工成本攀升、政策合规趋严、业务波动频繁等多重挑战…...
)
c++_csp-j算法 (5)
动态规划 介绍 动态规划(Dynamic Programming)是一种常用的解决优化问题的算法设计技术,常用于解决具有重叠子问题和最优子结构性质的问题。动态规划算法通过将问题划分为子问题,解决子问题并将子问题的解保存起来,最终构建出原问题的解。在本节中,我们将详细介绍动态规…...

sql server tempdb库的字符集和用户库字符集不一样
执行2个表用not in 关联,但是提示这个错误 消息 468,级别 16,状态 9,第 74 行 无法解决 equal to 运算中 "Latin1_General_CI_AS" 和 "Chinese_PRC_CI_AS" 之间的排序规则冲突。 对比2个表字段字符集都是&…...

Spring Boot 启动生命周期详解
Spring Boot 启动生命周期详解 1. 启动阶段划分 Spring Boot 启动过程分为 4个核心阶段,每个阶段涉及不同的核心类和执行逻辑: 阶段 1:预初始化(Pre-initialization) 目标:准备启动器和环境配置关键类&am…...

蓝桥杯 20. 压缩变换
压缩变换 原题目链接 题目描述 小明最近在研究压缩算法。他知道,压缩时如果能够使数值很小,就能通过熵编码得到较高的压缩比。然而,要使数值变小是一个挑战。 最近,小明需要压缩一些正整数序列,这些序列的特点是&a…...

数据湖DataLake和传统数据仓库Datawarehouse的主要区别是什么?优缺点是什么?
数据湖和传统数据仓库的主要区别 以下是数据湖和传统数据仓库的主要区别,以表格形式展示: 特性数据湖传统数据仓库数据类型支持结构化、半结构化及非结构化数据主要处理结构化数据架构设计扁平化架构,所有数据存储在一个大的“池”中多层架…...

YOLO改进实战:添加SOCA注意力机制提升目标检测性能
## 目录 1. **注意力机制简介** 2. **SOCA模块的核心原理** 3. **YOLOv5添加SOCA的完整步骤** 4. **实验效果与性能对比** 5. **SOCA的改进优势与创新性** --- ### 一、注意力机制简介 注意力机制(Attention Mechanism)模仿人类视觉的选择性关注特性,通过动态…...

Python爬虫实战:获取网yi新闻网财经信息并做数据分析,以供选股做参考
一、引言 在财经领域,股市信息对投资者意义重大。网yi新闻作为知名新闻资讯平台,其股市板块蕴含丰富的最新股市热点信息。然而,依靠传统人工方式从海量网页数据中获取并分析这些信息,效率低下且难以全面覆盖。因此,利用爬虫技术自动化抓取相关信息,并结合数据分析和机器…...
解决conda虚拟环境安装包却依旧安装到base环境下
最近跑项目装包装到几度崩溃,包一直没有安装到正确位置,为此写下这篇文章记录一下,也希望能帮到有需要的人。(此文章开发环境为anaconda和window) 方法一 先conda deactivate,看到(base)消失…...
在AIoT芯片中的应用)
IPOF方法学应用案例:动态电压频率调整(DVFS)在AIoT芯片中的应用
案例:动态电压频率调整(DVFS)在AIoT芯片中的应用 一、背景知识 继上一篇IPOF(Input-Process-Output-Feedback)方法学简介, 这一篇我们给出一个IPOF在集成电路芯片领域的一个应用场景。 动态电压频率调整&…...

Vue 3新手入门指南,从安装到基础语法
作为一名前端新手,你可能听说过Vue.js的简单与强大,但面对框架的安装和一堆新概念,可能会觉得无从下手。别担心!这篇文章将带你从零开始,完成Vue3的安装,并通过简单示例掌握核心语法。无论你是完全零基础&a…...

反爬加密字体替换机制解析
加密字体替换是网站反爬虫的常用技术之一,其核心是通过自定义字体文件对关键数据(如数字、文字)进行动态渲染,使源码中显示的字符与用户实际看到的内容不一致。下面从技术原理、实现类型和破解方法三个方向展开分析,并…...
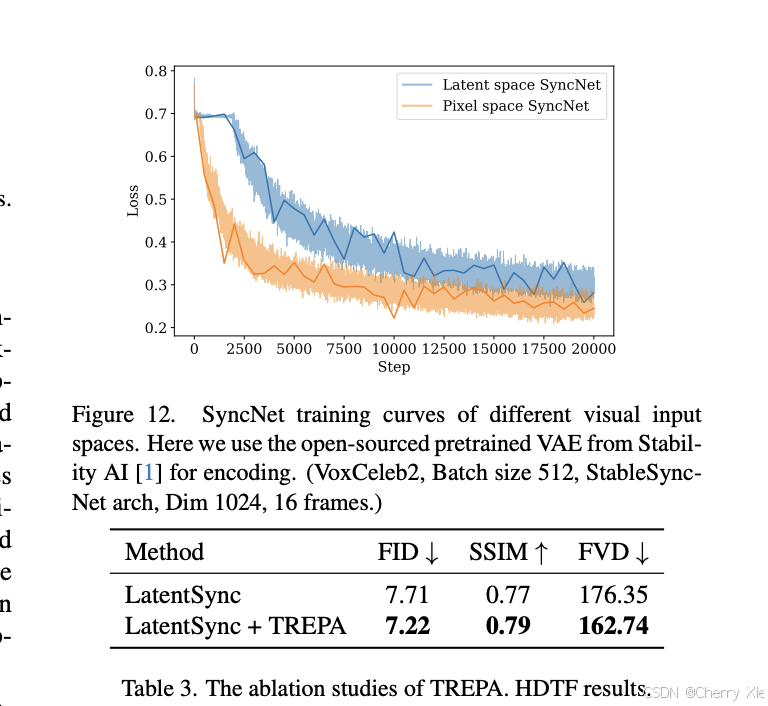
字节跳动开源数字人模型latentsync1.5,性能、质量进一步优化~
项目背景 LatentSync1.5 是由 ByteDance 开发的一款先进的 AI 模型,专门针对视频唇同步(lip synchronization)任务设计,旨在实现音频与视频唇部动作的高质量、自然匹配。随着 AI 技术的快速发展,视频生成和编辑的需求…...