STM32系统定时器以及微秒延时函数分析
在CubeMX生成的工程中系统时钟节拍配置的函数为:
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{HAL_StatusTypeDef status = HAL_OK;/* Check uwTickFreq for MisraC 2012 (even if uwTickFreq is a enum type that doesn't take the value zero)*/if ((uint32_t)uwTickFreq != 0U){/*Configure the SysTick to have interrupt in 1ms time basis*/if (HAL_SYSTICK_Config(SystemCoreClock / (1000U / (uint32_t)uwTickFreq)) == 0U){/* Configure the SysTick IRQ priority */if (TickPriority < (1UL << __NVIC_PRIO_BITS)){HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0U);uwTickPrio = TickPriority;}else{status = HAL_ERROR;}}else{status = HAL_ERROR;}}else{status = HAL_ERROR;}/* Return function status */return status;
}上述代码中的HAL_SYSTICK_Config函数为配置节拍的函数,原型为:
/*** @brief Initialize the System Timer with interrupt enabled and start the System Tick Timer (SysTick):* Counter is in free running mode to generate periodic interrupts.* @param TicksNumb: Specifies the ticks Number of ticks between two interrupts.* @retval status: - 0 Function succeeded.* - 1 Function failed.*/
uint32_t HAL_SYSTICK_Config(uint32_t TicksNumb)
{return SysTick_Config(TicksNumb);
}可以看到此函数体调用了另一个函数SysTick_Config,SysTick_Config函数的原型为:
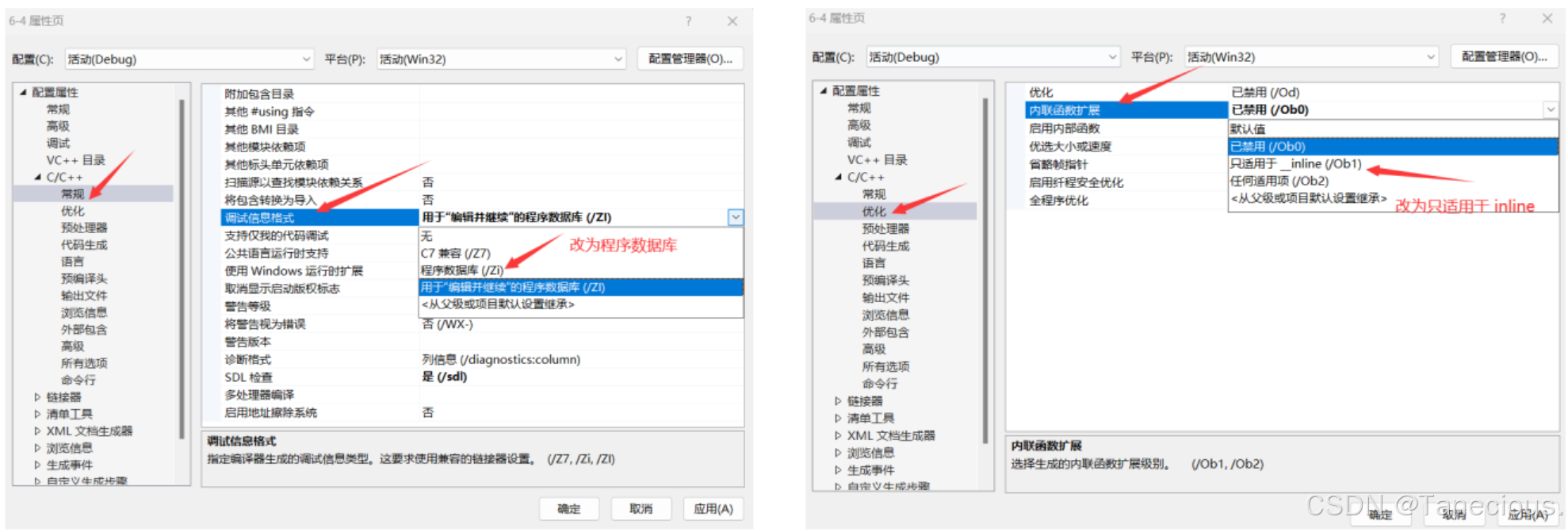
__STATIC_INLINE uint32_t SysTick_Config(uint32_t ticks)
{if ((ticks - 1UL) > SysTick_LOAD_RELOAD_Msk){return (1UL); /* Reload value impossible */}SysTick->LOAD = (uint32_t)(ticks - 1UL); /* set reload register */NVIC_SetPriority (SysTick_IRQn, (1UL << __NVIC_PRIO_BITS) - 1UL); /* set Priority for Systick Interrupt */SysTick->VAL = 0UL; /* Load the SysTick Counter Value */SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |SysTick_CTRL_TICKINT_Msk |SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */return (0UL); /* Function successful */
}由上述代码可以看到SysTick_Config函数执行具体的LOAD配置、VAL配置、CTRL配置。
下面我们逐一分析这三个寄存器的赋值是多少、以及赋值后完成的功能。(下面的分析是以STM32L475VET6芯片为例)
1、SysTick->LOAD表示系统定时器递减到0后的重装载值。
由函数调用关系得知:SysTick->LOAD的值等于((SystemCoreClock / (1000U / (uint32_t)uwTickFreq))- 1),系统时钟为SystemCoreClock = 80MHz = 80000000Hz。节拍频率uwTickFreq打印得知为1,所以SysTick->LOAD的值为80000 - 1 = 79999。因为系统时钟为80MHz,所以系统定时器的两次中断时间间隔为:1 / 80000000 * 80000 = 1/1000 = 1ms。由此可知系统定时定时器从79999减到0需要1ms,所以1μs = 80000 / 1000 = 80。即系统定时器每递减80个数历时1μs。
2、SysTick->VAL表示系统定时器的当前值,初始化为赋值为0。
3、SysTick->CTRL表示系统定时器的控制和状态寄存器。工程中使用了三个宏以按位或的方式对其进行赋值:SysTick_CTRL_CLKSOURCE_Msk、SysTick_CTRL_TICKINT_Msk、SysTick_CTRL_ENABLE_Msk。
SysTick_CTRL_CLKSOURCE_Msk:通常用于选择SysTick定时器的时钟源。如果它的值设置为1,那么SysTick定时器通常会使用外部时钟源(如核心时钟或参考时钟),而不是内部时钟源。
SysTick_CTRL_TICKINT_Msk:这个宏用于使能SysTick中断。当SysTick定时器达到其重载值时,如果此位被设置,它将产生一个中断请求。这允许你在SysTick定时器溢出时执行中断服务程序(ISR),从而可以在不阻塞主程序执行的情况下执行定时任务。
SysTick_CTRL_ENABLE_Msk:这个宏用于启动SysTick定时器。如果此位被设置,SysTick定时器将开始计数,并在达到重载值时递减到0。如果之前已经设置了中断使能位,那么在每次达到重载值时都会产生中断。
微秒延时函数如下:
void delay_us(u32 nus)
{u32 ticks;u32 told, tnow, tcnt = 0;u32 reload = SysTick->LOAD; // LOAD的值ticks = nus * 80; // 需要的节拍数told = SysTick->VAL; // 刚进入时的计数器值while (1){tnow = SysTick->VAL;if (tnow != told){if (tnow < told)tcnt += told - tnow; // 这里注意一下SYSTICK是一个递减的计数器就可以了.elsetcnt += reload - tnow + told;told = tnow;if (tcnt >= ticks)break; // 时间超过/等于要延迟的时间,则退出.}}
}相关文章:

STM32系统定时器以及微秒延时函数分析
在CubeMX生成的工程中系统时钟节拍配置的函数为: __weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority) {HAL_StatusTypeDef status HAL_OK;/* Check uwTickFreq for MisraC 2012 (even if uwTickFreq is a enum type that doesnt take the value zero)…...
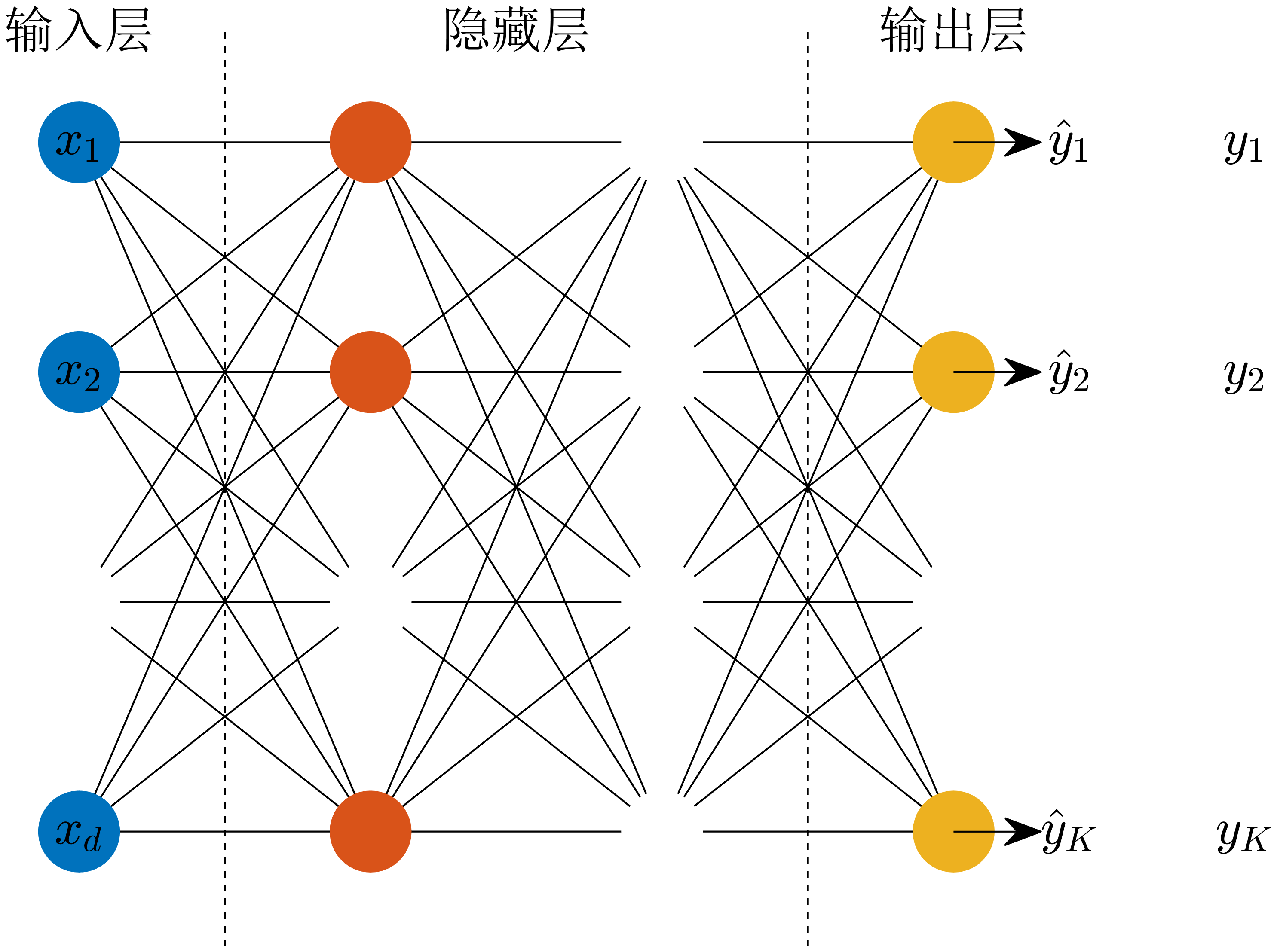
神经网络发展历程——积跬步至千里
神经网络类型层线性or非线性创新问题备注感知器单层线性模型,输出 1 1 1, − 1 -1 −1误差反馈学习阈值函数不可导,构造学习规则与感知器准则等价线性神经元单层线性模型梯度下降法训练参数线性函数,多层仍是线性变换本质上是最小…...

Java 24:重构数字信任边界 —— 后量子时代的智能安全防御体系构建
引言 在量子计算阴影与 AI 驱动攻击交织的网络安全新纪元,Java 平台正经历着自诞生以来最深刻的安全架构革新。作为企业级应用的核心基础设施,Java 24 不仅延续了 “一次编写,处处运行” 的跨平台基因,更以后量子密码学引擎、动态…...

荣耀A8互动娱乐组件部署实录(第2部分:界面逻辑与资源加载机制)
作者:从 Spine 骨骼动画里抠图三小时没睡的美术兼前端苦工 一、界面整体架构拆解 荣耀A8组件采用的是典型的分模块 UI 架构,即:主界面为入口容器,不同子页面(如商城、银行、客服、游戏入口)以逻辑功能划分…...

mac 使用 Docker 安装向量数据库Milvus独立版的保姆级别教程
Milvus 特点:开源的云原生向量数据库,支持多种索引类型和GPU加速,能够在亿级向量规模下实现低延迟高吞吐。具有灵活的部署选项和强大的社区支持。 适用场景:适合处理超大规模数据和高性能需求的应用,如图像搜索、推荐…...
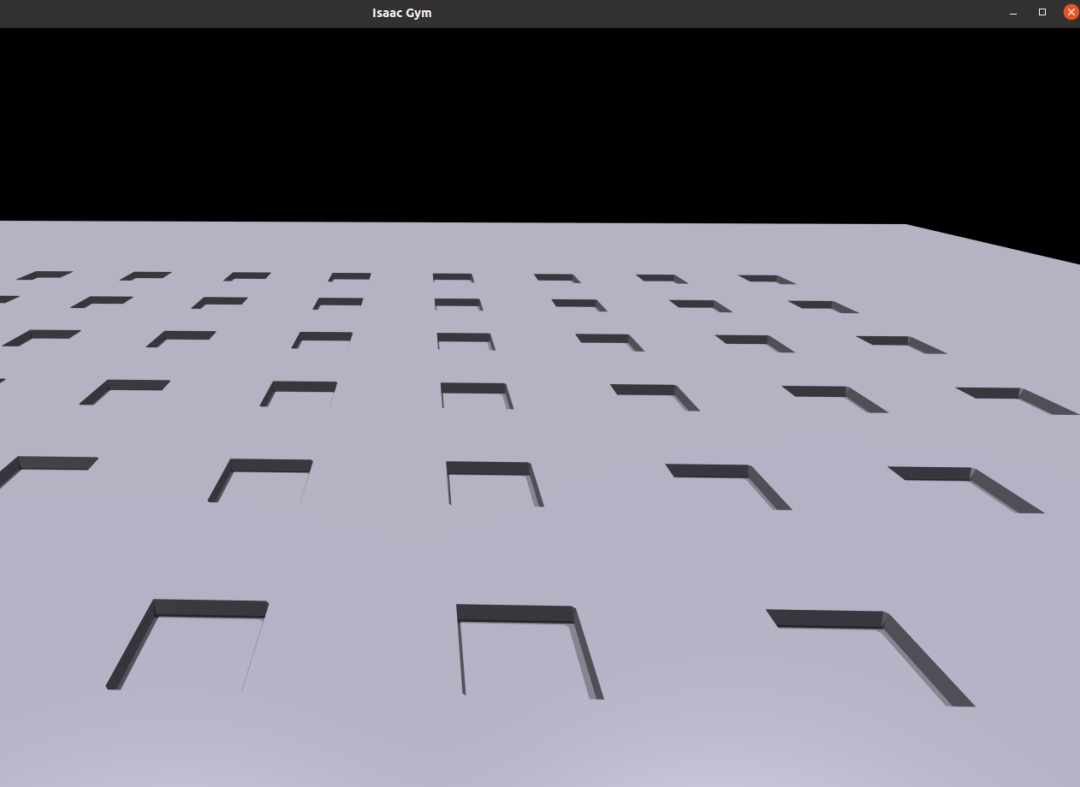
技术视界 | 青龙机器人训练地形详解(一):如何创建一个地形
机器人强化学习中的地形训练是利用强化学习算法让机器人在不同地形环境中通过试错学习最优行为策略的过程,通过环境建模、策略学习与优化等环节,使机器人能够自主适应复杂多变的地形,提高其移动效率、稳定性和自主性,减少人为干预…...

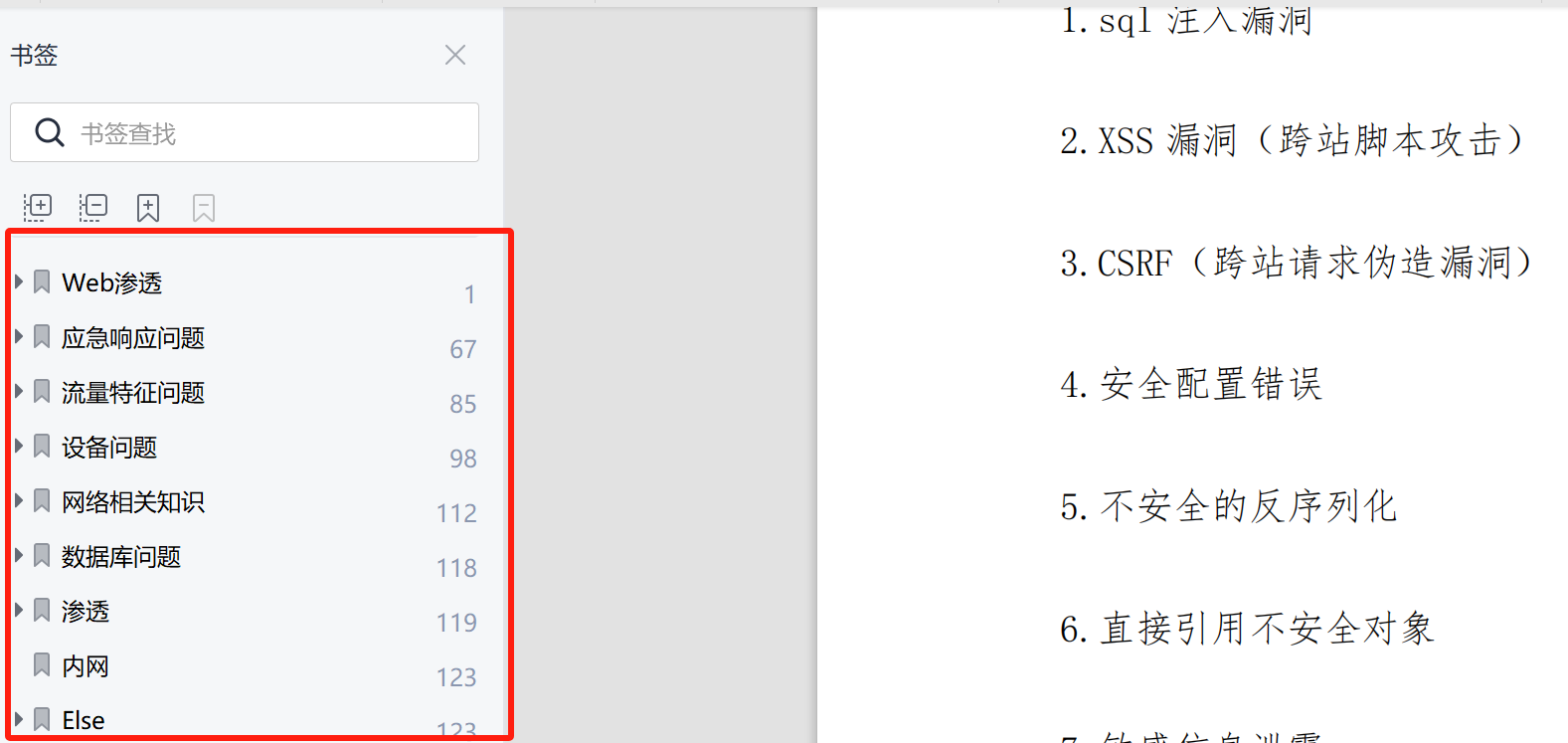
网络安全系列--《文章1:网络安全基础与核心概念》
课程1:网络安全基础与核心概念 学习内容 1. 网络安全定义 网络安全是通过技术、管理及法律手段保护网络系统的硬件、软件及数据,使其免受破坏、篡改或泄露,确保系统稳定运行并提供可靠服务。其核心目标包括保密性、完整性、可用性、可控性及…...

2025-05-04 Unity 网络基础6——TCP心跳消息
文章目录 1 Disconnect 方法2 心跳消息 在客户端主动退出时,我们会调用 socket 的 ShutDown() 和 Close() 方法,但调用这两个方法后,服务器端无法得知客户端已经主动断开。 本文主要介绍在网络通信中,如何服务端如何判断客…...
word导出pdf带有目录导航栏-error记
1、打开word文档——>点击"视图"选项卡——>勾选"导航窗格" 2、点击"文件"——>导出——>创建PDF/XPS 3、点击"选项"——>勾选"创建书签时使用(C)" "标题(H)" 4、点击"确定"——>点击…...
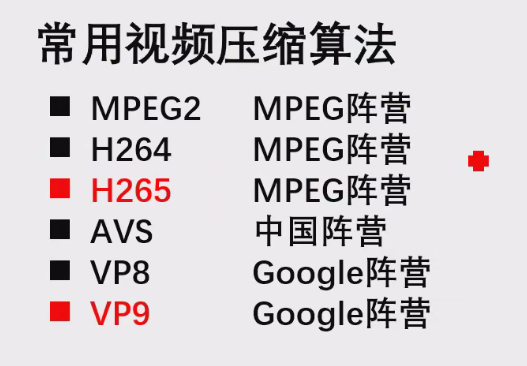
1. 视频基础知识
1. 图像基础概念 像素:像素是一个图片的基本单位,pix是英语单词picture,加上英语单词“元素element”,就得到了pixel,简称px。所以“像素”有“图像元素”之意。分辨率:指的是图像的大小或者尺寸。比如 19…...

VTK 数据结构和算法类介绍
基本数据结构类 vtkPolyData 描述: 表示多边形几何结构 主要属性: Points: vtkPoints对象,存储顶点坐标 Verts: vtkCellArray对象,存储顶点数据 Lines: vtkCellArray对象,存储线数据 Polys: vtkCellArray对象,存储多边形数据 Strips: vtkCellArray对象,存储三角带数据 常…...

云计算的基础概论
一、云计算基础概念 1. 云计算定义 • 英文:Cloud Computing • 定义:通过互联网(Internet)按需提供可扩展的计算资源(如服务器、存储、数据库、网络、软件等),用户无需管理底层基础设施。 …...
HarmonyOS-hdc远程网络方式连接设备
hdc工具使用手册 1 hdc简介 hdc(OpenHarmony Device Connector)是为开发人员提供的用于设备连接调试的命令行工具,pc端开发机使用命令行工具hdc,该工具需支持部署在Windows/Linux/Mac等系统上与OpenHarmony设备(或模…...

【计算机网络网络层深度解析】从IP协议到路由优化
目录 前言技术背景与价值当前技术痛点解决方案概述目标读者说明 一、技术原理剖析核心概念图解核心作用讲解关键技术模块说明技术选型对比 二、实战演示环境配置要求核心实验实现实验1:IPv6地址配置实验2:OSPF路由配置实验3:NAT转换验证 运行…...

不同OS版本中的同一yum源yum list差异排查思路
问题描述: qemu-guest-agent二进制rpm包的yum仓库源和yum源仓库配置文件path_to_yum_conf, 通过yum list --available -c path_to_yum_conf 查询时,不同的OS版本出现了不同的结果 anolis-8无法识别 centos8可以识别 说明: 1 测试…...

奥威BI:AI+BI深度融合,重塑智能AI数据分析新标杆
在数字化浪潮席卷全球的今天,企业正面临着前所未有的数据挑战与机遇。如何高效、精准地挖掘数据价值,已成为推动业务增长、提升竞争力的核心议题。奥威BI,作为智能AI数据分析领域的领军者,凭借其创新的AIBI融合模式,正…...

第三节第一部分:Static修饰类变量、成员变量
总结 案例 要求 代码: User类: package com.day1_static;public class User {public static int num;public User() {User.num;} }Test类: package com.day1_static;public class Test {public static void main(String[] args) {User us…...

高级架构软考之网络OSI网络模型
高级架构软考之网络: 1.OSI网络模型: a.物理层: a.物理传输介质物理连接,负责数据传输,并监控数据 b.传输单位:bit c.协议: d:对应设备:中继器、集线器 b.数据链路层: a.…...

Kubernetes(k8s)学习笔记(六)--KubeSphere前置环境安装
1、安装 helm(master 节点执行) Helm 是 Kubernetes 的包管理器。包管理器类似于我们在 Ubuntu 中使用的apt、Centos 中使用的 yum 或者 Python 中的 pip 一样,能快速查找、下载和安装软件包。Helm由客户端组件 helm 和服务端组件 Tiller 组…...

PyTorch_张量元素类型转换
tensor.type([张量类型])torch.double() 代码 import torch import numpy as np # 使用 type() 函数进行转换 def test01():data torch.full([2,3], 10)print(data.dtype)# 注意:返回一个新的类型转换过的张量data data.type(torch.DoubleTensor)#data data.ty…...

架构思维:构建高并发读服务_异构数据的同步一致性方案
文章目录 一、引言二、全景架构回顾三、潜在问题问题1:Binlog 延迟——理想 vs 实际问题2:Binlog 格式解析问题3:高可靠消费1. 串行 ACK 消费2. 并行消费+乱序风险3. 解决方案 问题4:缓存数据结构设计1. Key–Value 冗…...

剑指大规模 AI 可观测,阿里云 Prometheus 2.0 应运而生
作者:曾庆国(悦达) Prometheus 大家应该非常熟悉,正文开始前,让我们一起来回顾开源 Prometheus 项目的发展史。Prometheus 最初由 SoundCloud 的工程师 Bjrn Rabehl 和 Julius Volz 于 2012 年开发。当时,…...

游戏引擎学习第260天:在性能分析器中实现钻取功能
昨天那个帧内存满之后触发段错误实在没找到什么原因导致的 继续研究一下为什么导致的 内存不够进来释放frame 释放frame 应该会给DebugState->FirstFreeStoredEvent 赋值吧 这段宏定义: #define FREELIST_DEALLOCATE(Pointer, FreeListPointer) \if(Pointer) {…...
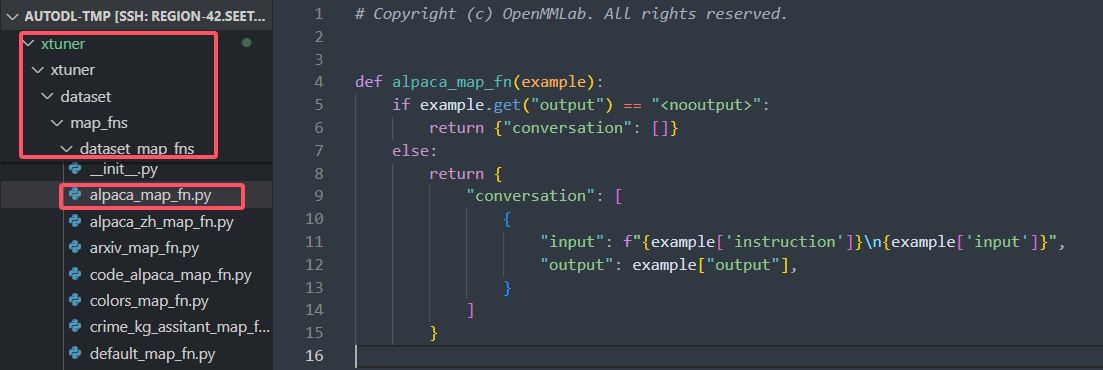
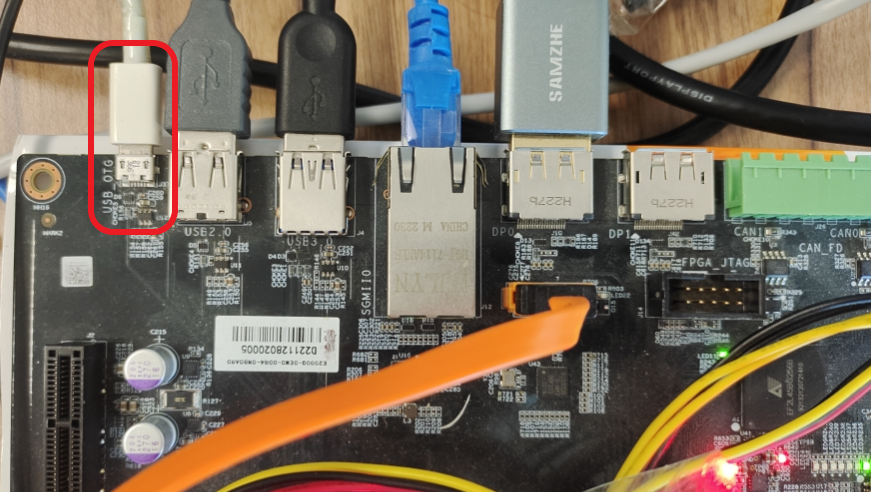
【自然语言处理与大模型】使用Xtuner进行QLoRA微调实操
本文首先对Xtuner这一微调框架进行简单的介绍。手把手演示如何使用Xtuner对模型进行微调训练,包括数据准备、训练命令执行及训练过程中的监控技巧。最后,在完成微调之后,本文还将介绍如何对微调结果进行简单对话测试。 一、Xtuner微调框架 X…...
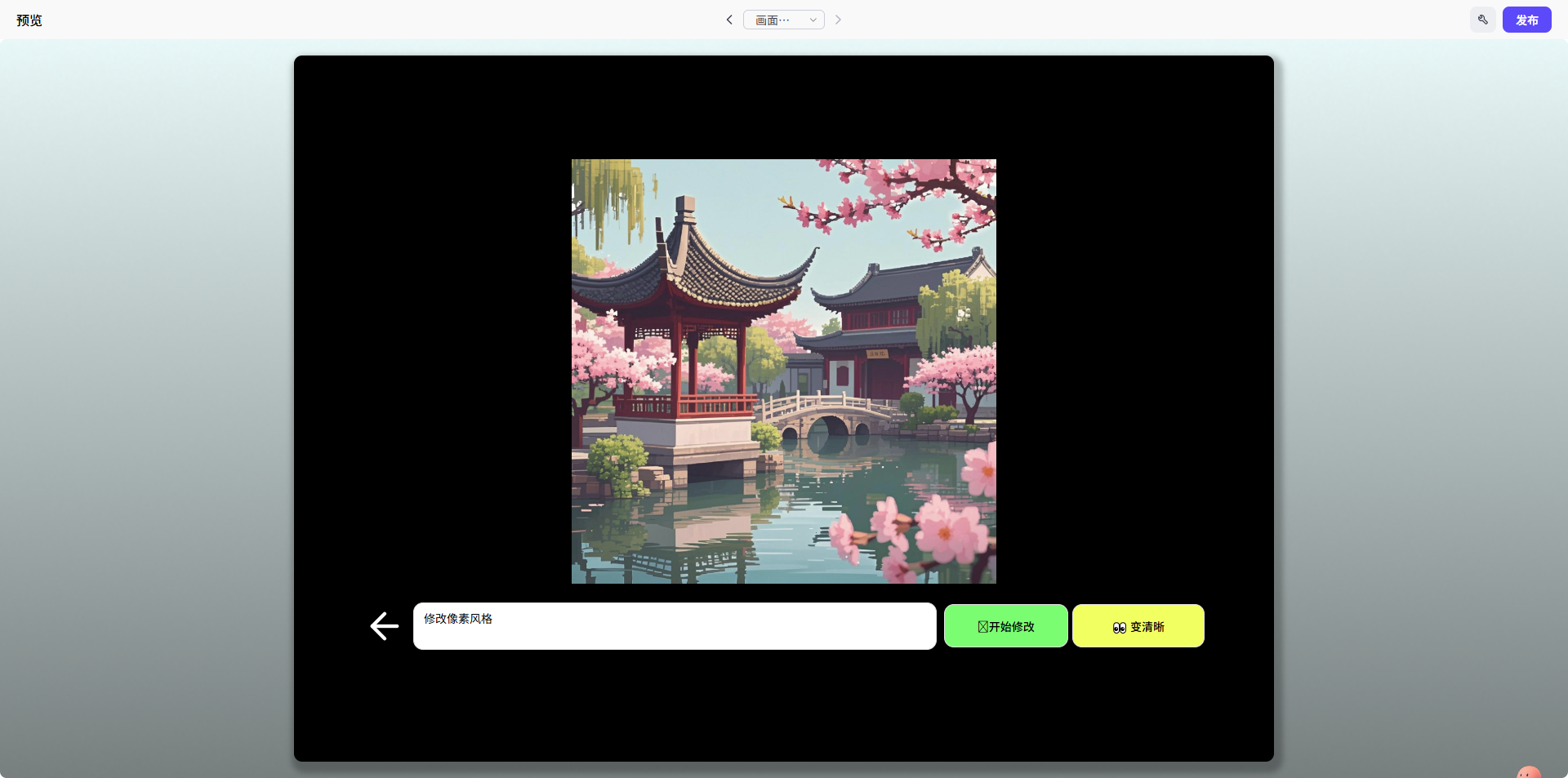
扣子创建一个应用
什么是扣子应用 扣子应用可以让你相对轻松的搭建一个具备AI功能的应用,它区别智能体,在于智能体的ui和交互相对固定,主要是以对话框聊天的方式进行交互,而扣子应用则可以让ui交互表现更加丰富。 实践一个生成图片的应用 这里我…...

SpringBoot教程(vuepress版)
Spring Boot 教程 项目介绍 这是一个系统化的 Spring Boot 学习教程,采用循序渐进的方式,帮助开发者从零开始掌握 Spring Boot 开发。 教程特点 系统化的知识结构实用的代码示例完整的实战案例丰富的练习作业 目录结构 基础入门 Spring Boot 简介…...
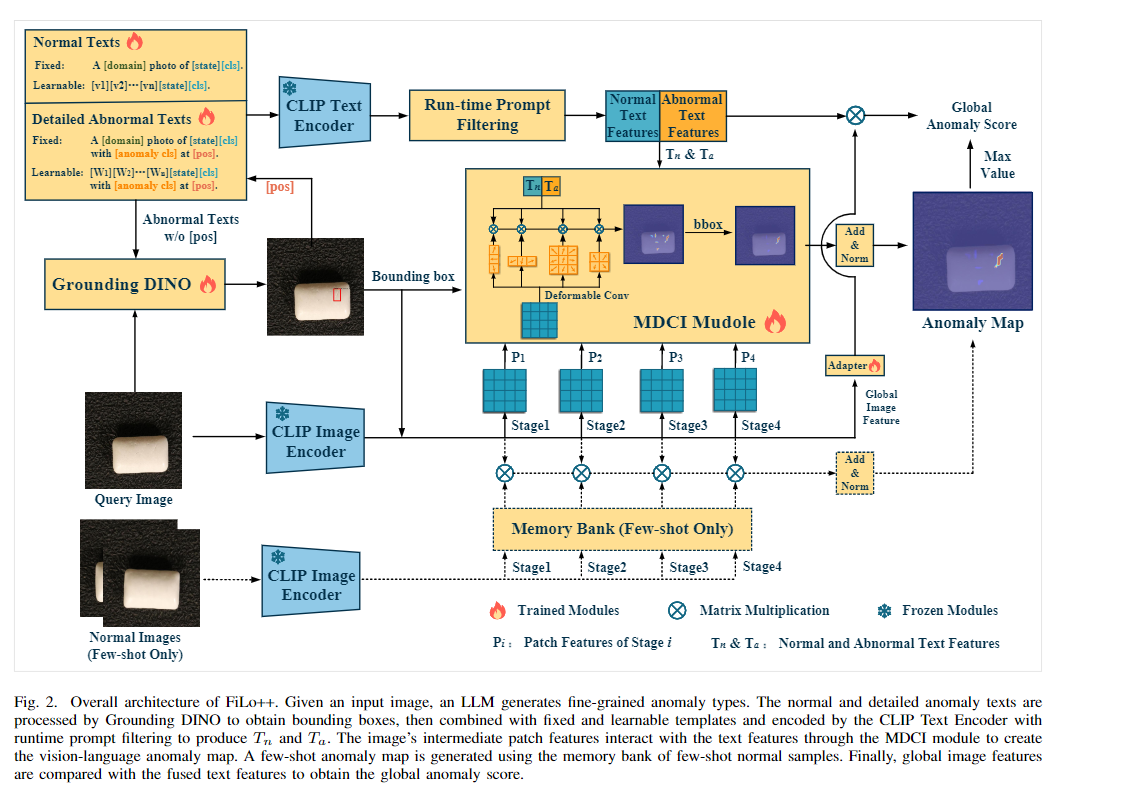
FiLo++的框架图介绍
FiLo框架图模块详解 1. 文本生成模块 Normal Texts 功能:生成正常样本的文本描述。输入:固定模板(如 A [domain] photo of [state][cls])和可学习模板(如 [v1][v2]...[vm][state][cls])。输出:融…...
C++--入门基础
C入门基础 1. C的第一个程序 C继承C语言许多大多数的语法,所以以C语言实现的hello world也可以运行,C中需要把文件定义为.cpp,vs编译器看是.cpp就会调用C编译器编译,linux下要用g编译,不再是gcc。 // test.cpp #inc…...
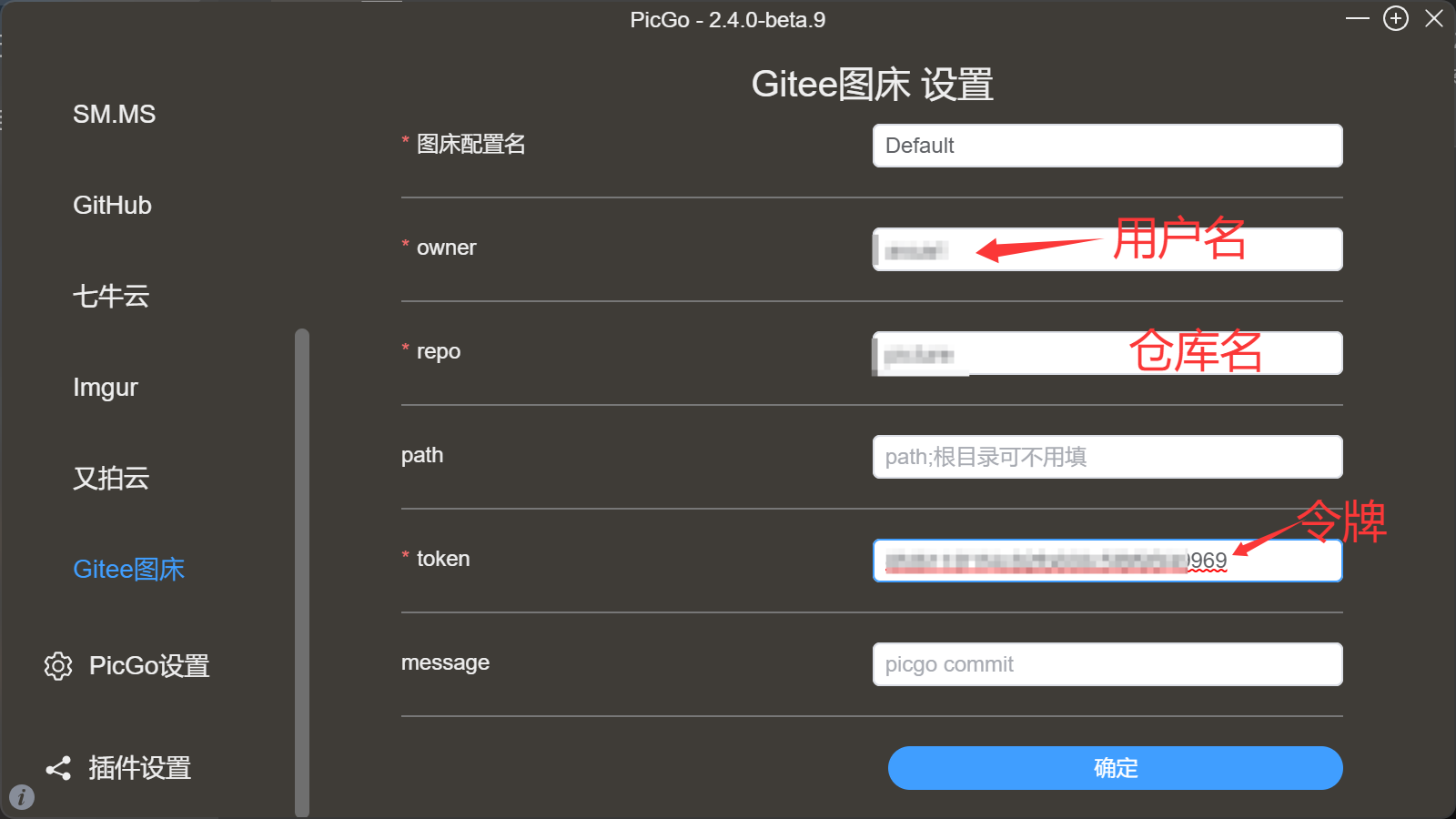
准确---Typora配置Gitee图床并实现自动图片上传
下载地址:https://github.com/Molunerfinn/picgo/releases 安装就直接下一步,下一步就行 安装完以后然后回到Typora上偏好设置指定一下路径 默认是 C:\Program Files\PicGo\PicGo.exe 并且还需要选择规则 接下来就需要去PicGo上面配置了 配置之前需要去…...
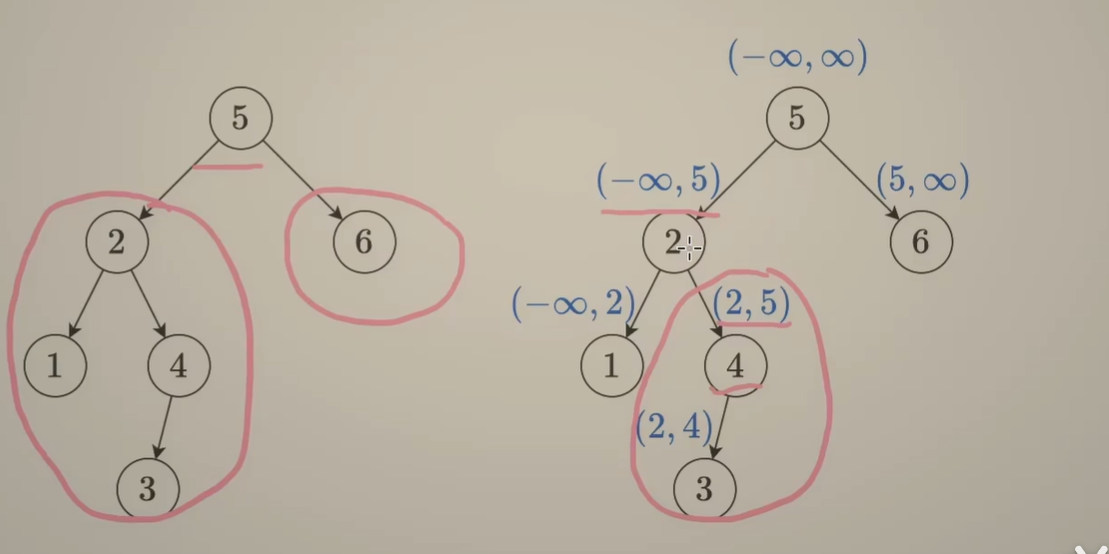
Day111 | 灵神 | 二叉树 | 验证二叉搜索树
Day111 | 灵神 | 二叉树 | 验证二叉搜索树 98.验证二叉搜索树 98. 验证二叉搜索树 - 力扣(LeetCode) 方法一:前序遍历 递归函数传入合法的左右边界,只有当前结点是合法的边界,才是二叉搜索树,否则就返回…...