0基础 | STM32 | TB6612电机驱动使用
TB6612介绍及使用
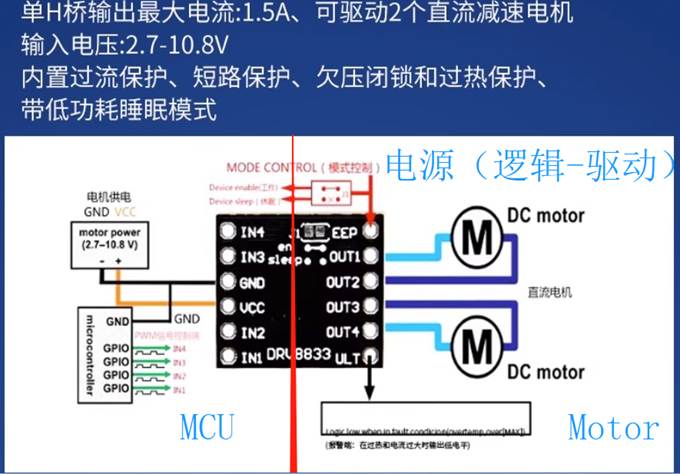
单片机通过驱动板连接至电机
原因:单品机I/O口输出电流I小
| 驱动板:从外部引入高电压,控制电机驱动 | ||||||||
|
| ||||||||
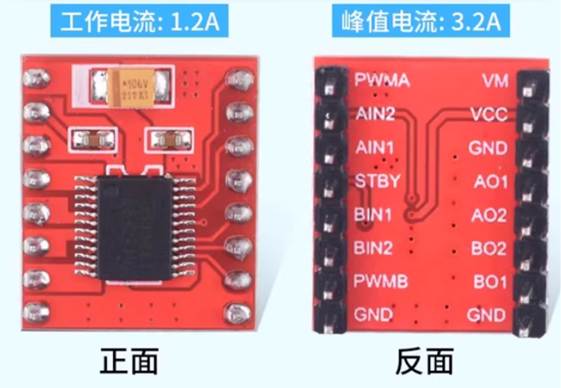
| 电源部分 | VM:电机驱动电源输入,输入电压范围建议为3.7~12V | |||||||
| GND:逻辑电源和电机驱动电源的公共地 | VCC:逻辑电源输入,输入电压为 2.7-5.5V | |||||||
| 电机接口 | A0 B0可以接两个电机 | |||||||
| 电机控制端口 | ||||||||
| PWMA B分别为两个电机控制的使能端 (可使用PWM调速) | AIN1\AIN2;BIN1\BIN2 | |||||||
| STBY | 使能引脚 | |||||||
| IN1 | IN2 | PWM | STBY | O1 | O2 | |||
| H | H | H/L | H | L | L | 制动 | ||
| L | H | H | H | L | H | 反转 | ||
| L | H | L | H | L | L | 制动 | ||
| H | L | H | H | H | L | 正转 | ||
| H | L | L | H | L | L | 制动 | ||
| L | L | H | H | OFF | - | 停止 | ||
| H/L | H/L | H/L | L | OFF | - | 待机 | ||
| main.c #include "stm32f10x.h" #include "led.h" #include "usart.h" #include "delay.h" #include "oled.h" #include "Motor.h" #include "key.h" int key = 0; int key_state = 0; int main(void) { SystemInit();//系统时钟为72M delay_init(72); LED_Init(); LED_On(); MOTOR_Init(); USART1_Config();//串口初始化 Key_Init(); OLED_Init(); printf("Start \n"); delay_ms(1000);
OLED_Clear();//显示电机转速 OLED_ShowChinese(0,0,0,16,1); OLED_ShowChinese(16,0,1,16,1); OLED_ShowChinese(32,0,2,16,1); OLED_ShowChinese(48,0,3,16,1); OLED_ShowChar(64,0,':',16,1); while (1) {key = Key_GetData(); if(key) key_state++; if(key_state%4==1) {Motor_SetSpeed(60); OLED_ShowNum(56,24,1,1,16,1); }if(key_state%4==2) {Motor_SetSpeed(80); OLED_ShowNum(56,24,2,1,16,1);} if(key_state%4==3) {Motor_SetSpeed(100); OLED_ShowNum(56,24,3,1,16,1);} if(key_state%4==0) {Motor_SetSpeed(0); OLED_ShowNum(56,24,0,1,16,1); //0}}} |
| Motor.c #include "Motor.h" void MOTOR_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(MOTOR_CLK, ENABLE ); //配置时钟 GPIO_InitStructure.GPIO_Pin = MOTOR_AIN1_GPIO_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(MOTOR_AIN1_GPIO_PORT,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = MOTOR_AIN2_GPIO_PIN; GPIO_Init(MOTOR_AIN2_GPIO_PORT,&GPIO_InitStructure); PWM_Init(); } void PWM_Init(void) { RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = MOTOR_PWMA_GPIO_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(MOTOR_PWMA_GPIO_PORT, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出 TIM_InternalClockConfig(TIM2);//配置实际单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数模式 TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //自动重装ARR 分辨率 TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //预分频PSC TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋予初值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; //CCR TIM_OC3Init(TIM2,&TIM_OCInitStructure); TIM_Cmd(TIM2,ENABLE);} void PWM_SetCompare3(uint16_t compare) {TIM_SetCompare3(TIM2,compare); }void Motor_SetSpeed(int8_t Speed) {if(Speed >= 0) { GPIO_SetBits(MOTOR_AIN1_GPIO_PORT,MOTOR_AIN1_GPIO_PIN); GPIO_ResetBits(MOTOR_AIN2_GPIO_PORT,MOTOR_AIN2_GPIO_PIN); PWM_SetCompare3(Speed); }else{ GPIO_ResetBits(MOTOR_AIN1_GPIO_PORT,MOTOR_AIN1_GPIO_PIN); GPIO_SetBits(MOTOR_AIN2_GPIO_PORT,MOTOR_AIN2_GPIO_PIN); PWM_SetCompare3(-Speed);}} |
| Motor.h #ifndef __MOTOR_H #define __MOTOR_H #include "stm32f10x.h" #include "delay.h" #include "sys.h" /***************根据自己需求更改****************/ // TB6612FNG电机驱动模块 GPIO宏定义 #define MOTOR_CLK RCC_APB2Periph_GPIOA #define MOTOR_AIN1_GPIO_PIN GPIO_Pin_0 #define MOTOR_AIN2_GPIO_PIN GPIO_Pin_1 #define MOTOR_AIN1_GPIO_PORT GPIOA #define MOTOR_AIN2_GPIO_PORT GPIOA #define MOTOR_PWMA_GPIO_PIN GPIO_Pin_2 #define MOTOR_PWMA_GPIO_PORT GPIOA /*********************END**********************/ void MOTOR_Init(void); void PWM_Init(void); void Motor_SetSpeed(int8_t Speed); #endif |

代码放在下述连接里面,通过网盘分享的文件:TB6612电机调速资料
链接: https://pan.baidu.com/s/1D_d506c3pwiRzHCaSq2_Aw?pwd=HHRR 提取码: HHRR
--来自百度网盘超级会员v5的分享
此外还有一种电机驱动,介绍如下
微型双路直流电机驱动基于TB6612FNG驱动IC设计,采用特殊逻辑控制方式,仅需4根管脚即可实现双路电机控制,相比纯芯片而言,减少了两个IO管脚,为Arduino等控制器节约了宝贵的IO资源,可以应用在更多领域中。
TB6612FNG是一块双路全桥驱动芯片,单通道最大连续驱动电流可达1.2A,峰值2A/3.2A(连续脉冲/单脉冲),可驱动一些微型直流电机。控制逻辑与L298N类似,代码上可直接兼容DFRobot L298N电机驱动。标准XH2.54排针可直插面包板,无论是DIY制作,还是新产品开发,都是非常理想的一个选择!
产品参数
- 逻辑部分输入电压VCC:3.3~5V
- 驱动部分输入电压VM:2.5~12V
- 驱动电机路数:2通道
- 单通道最大连续驱动电流:1.2A
- 启动峰值:2A/3.2A(连续脉冲/单脉冲)
- 接口方式:2.54mm间距排针
模块尺寸:20 × 19.5(mm)
细节说明
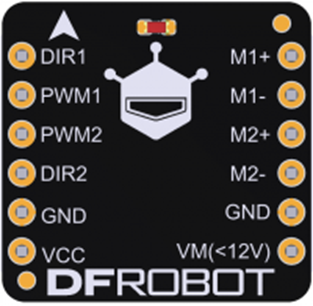
电机接口:M1,M2 可接入两个电机,其中标注了“+”、“-”表示两个电机的接线方向。
指示灯:正面指示灯:电源指示灯
电源部分

VCC:逻辑电源输入,输入电压为5V;
VM:电机驱动电源输入,输入电压范围建议为3.7~12V;
GND:逻辑电源和电机驱动电源的公共地。
电机控制端口
PWM1,PWM2:分别为两个电机控制的使能端(可使用PWM调速)
DIR1,DIR2:正反转控制信号输入端。比如,DIR1=1,M1电机正转; DIR1=0,M1电机反转。
引脚说明 | ||
| 管脚映射 | ||
| 标号 | 名称 | 功能描述 |
| 1 | DIR1 | 电机M1的方向控制引脚 |
| 3 | PWM2 | 电机M2的速度控制引脚 |
| 4 | DIR2 | 电机M2的方向控制引脚 |
| 5 | GND | 逻辑部分电源负极 |
| 6 | VCC | 逻辑部分电源正极 |
| 7 | M1+ | M1路电机输出1 |
| 8 | M1- | M1路电机输出2 |
| 9 | M2+ | M2路电机输出1 |
| 10 | M2- | M2路电机输出2 |
| 11 | GND | 电机电源负极 |
| 12 | VM(<12V) | 电机电源正极 |
模块尺寸:20 × 19.5(m\
相关文章:
0基础 | STM32 | TB6612电机驱动使用
TB6612介绍及使用 单片机通过驱动板连接至电机 原因:单品机I/O口输出电流I小 驱动板:从外部引入高电压,控制电机驱动 电源部分 VM:电机驱动电源输入,输入电压范围建议为3.7~12V GND:逻辑电…...
【Linux】POSIX 线程信号量与互斥锁▲
代码要求:高内聚,低耦合 高内聚:元素之间具有很强的关联性,模块的功能单一且集中 低耦合:代码之间的依赖关系尽可能简单,相互之间的影响和交互尽可能少 线程安全问题:多线程访问共享数据&…...

轻松制作高质量视频,实时生成神器LTX-Video重磅登场!
探索LTX-Video:实时视频生成跨越新高度 在如今这个视觉内容主导的数字时代,视频生成成为推动创意表达的关键。而今天,我们将带您深入探索LTX-Video,一个强大的开源项目,致力于通过尖端技术将视频生成提升到一个全新的…...
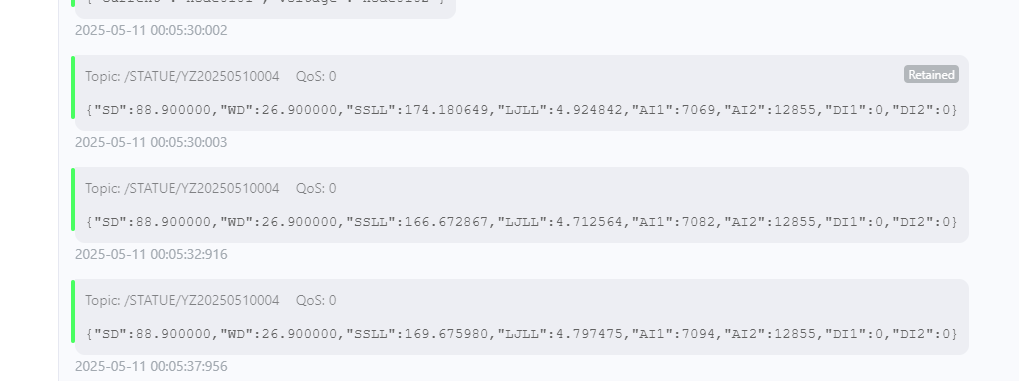
USR-M100采集数据并提交MQTT服务器
本文为记录备忘,不做过多解释。 模块自身带有2路数字量输入,2路模拟量输入,2路485接口 数字量接报警输入,模拟量接压力传感器,液位传感器,485接口分别接流量计,温湿度传感器。 正确接线&…...
内网穿透系列三:开源本地服务公网映射工具 tunnelmole
以下是对 tunnelmole 简要介绍: tunnelmole 是一款开源的内网穿透工具,一行命令就能把本地http服务映射成公网可访问的链接提供公共免费的网络服务,直接下载运行命令即可使用,也支持自行配置搭建私有客户端、服务端参考开源地址&…...
数据集-目标检测系列- 冥想 检测数据集 close_eye>> DataBall
数据集-目标检测系列- 冥想 检测数据集 close * 相关项目 1)数据集可视化项目:gitcode: https://gitcode.com/DataBall/DataBall-detections-100s/overview 2)数据集训练、推理相关项目:GitHub - XIAN-HHappy/ultralytics-yolo-…...

计算机网络:家庭路由器WiFi信号的发射和手机终端接收信号原理?
WiFi路由器与手机之间的信号传输涉及多个技术层面的协作,以下是其工作原理的详细步骤: 一、数据封装与协议处理 应用层数据生成 用户操作(如浏览网页、视频播放)产生数据包,经TCP/IP协议栈逐层封装,添加IP地址(网络层)和MAC地址(数据链路层)。协议封装 数据包被封装…...

用 NGINX 打造高性能 FastCGI 加速 `ngx_http_fastcgi_module`
一、安装与启用 # 在编译 NGINX 源码时加上: ./configure --with-http_fastcgi_module make && sudo make install# 或确保你使用的二进制已内置(大多数发行版都默认包含) nginx -V | grep fastcgi二、基础转发配置 http {server {…...

深度学习 ———— 迁移学习
迁移学习原理 什么是迁移学习? 迁移学习利用在大规模数据集(如ImageNet)上预训练的模型,改装小数据集(如CIFAR-10)。优势: 减少训练时间:预训练模型已学习通用特征(如边…...

论文精读:YOLOE: Real-Time Seeing Anything
文章目录 前言1、背景2、方法2.1.重参Region-Text对齐模块2.2.VisualPrompt模块2.3.PromptFree 2.4.损失函数3、实验3.1.训练集3.2.实验结果 总结 前言 本文介绍一篇来自清华的开放词汇检测论文:YOLOE;源码链接。 1、背景 本文在yolo-world基础上&#x…...

以影像为笔,劳润智在世界舞台上书写艺术之路
在光影交织中,摄影师劳润智的镜头仿佛能穿透喧嚣,捕捉人类情感最细腻的脉动。从疫情下洛杉矶裁缝日常的温馨瞬间,到象征自由与解脱的飞鸟影像,再到探索时间与空间交错的抽象作品,每一幅作品都展现了他对艺术的深度追求与对生活的温柔洞察。 劳润智的作品为他赢得了多个国际奖项…...

vue3 computed方法传参数
我们对computed的基础用法不陌生,比如前端项目中经常会遇到数据处理的情况,我们就会选择computed方法来实现。但大家在碰到某些特殊场景,比如在template模板中for循环遍历时想给自己的计算属性传参,这个该怎么实现呢,很…...

【ES】Elasticsearch字段映射冲突问题分析与解决
在使用Elasticsearch作为搜索引擎时,经常会遇到一些映射(Mapping)相关的问题。本文将深入分析字段映射冲突问题,并通过原生的Elasticsearch API请求来复现和解决这个问题。 问题描述 在实际项目中,我们遇到以下错误: Transport…...

昇腾NPU容器内 apt 换源
环境 昊算NPU云910b 问题 缺少vim等,同时无法apt安装新的依赖 解决办法 使用vi修改/etc/apt/sources.list.d/debian.sources Types: deb URIs: http://deb.debian.org/debian Suites: bookworm bookworm-updates bookworm-backports Components: main contrib…...
:索引深度解析 —— 性能优化的核心武器)
MySQL 从入门到精通(五):索引深度解析 —— 性能优化的核心武器
目录 一、索引概述:数据库的 “目录” 1.1 什么是索引? 1.2 索引的性能验证:用事实说话 实验环境准备 无索引查询耗时 有索引查询耗时 索引的 “空间换时间” 特性 二、索引的创建:三种核心方式 2.1 方式 1:C…...

spark-Join Key 的基数/rand函数
在数据处理中,Join Key 的基数 是指 Join Key 的唯一值的数量(也称为 Distinct Key Count)。它表示某个字段(即 Join Key)在数据集中有多少个不同的值。 1. Join Key 基数的意义 高基数:Join Key 的唯一值…...
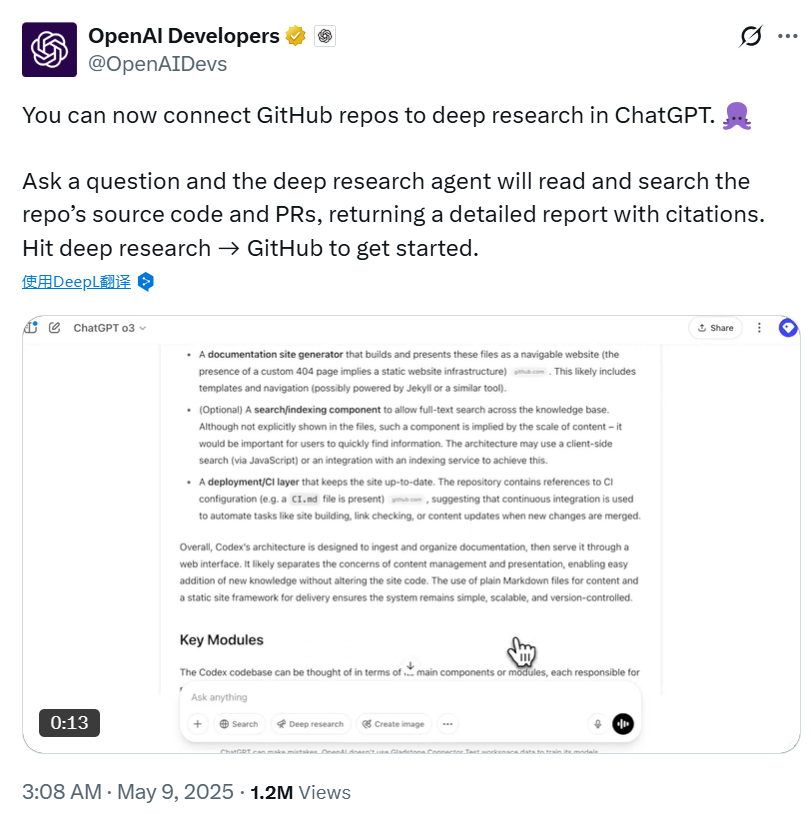
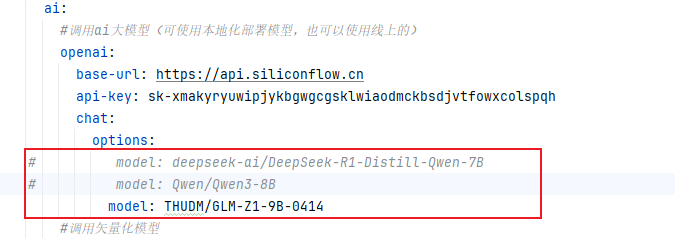
LLMs之ChatGPT:《Connecting GitHub to ChatGPT deep research》翻译与解读
LLMs之ChatGPT:《Connecting GitHub to ChatGPT deep research》翻译与解读 导读:这篇OpenAI帮助文档全面介绍了将GitHub连接到ChatGPT进行深度代码研究的方法、优势和注意事项。通过连接GitHub,用户可以充分利用ChatGPT强大的代码理解和生成…...

【桌面】【输入法】常见问题汇总
目录 一、麒麟桌面系统输入法概述 1、输入法介绍 2、输入法相关组件与服务 3、输入法调试相关命令 3.1、输入法诊断命令 3.2、输入法配置重新加载命令 3.3、启动fcitx输入法 3.4、查看输入法有哪些版本,并安装指定版本 3.5、重启输入法 3.6、查看fcitx进程…...

R语言学习--Day01--数据清洗初了解andR的经典筛选语法
当我们在拿到一份数据时,是否遇到过想要分析数据却无从下手?通过编程语言去利用它时发现有很多报错不是来源于代码而是因为数据里有很多脏数据;在这个时候,如果你会用R语言来对数据进行清洗,这会让你的效率提升很多。 …...
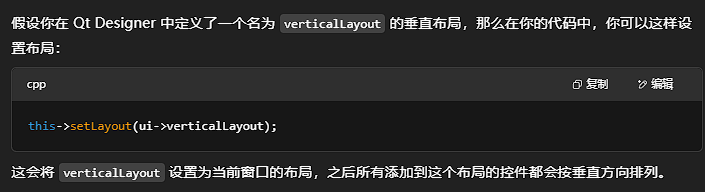
QT的初始代码解读及其布局和弹簧
this指的是真正的当前正在显示的窗口 main函数: Widget w是生成了一个主窗口,QT Designer是在这个主窗口里塞组件 w.show()用来展示这个主窗口 头文件: namespace Ui{class Widget;}中的class Widget和下面的class Widget不是一个东西 Ui…...

Profinet转CanOpen网关,打破协议壁垒的关键技术
在石油化工行业的生产现场,各类自动化设备如同精密运转的神经系统,而通信协议则是传递信号的"语言"。当不同厂商的设备采用Canopen与Profinet这两种主流工业协议时,就像两个使用不同方言的专家需要实时协作,此时开疆智能…...
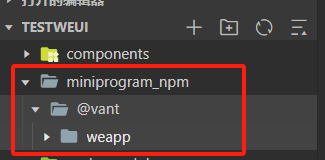
引用第三方自定义组件——微信小程序学习笔记
1. 使用 npm 安装第三方包 1.1 下载安装Node.js 工具 下载地址:Node.js — Download Node.js 1.2 安装 npm 包 在项目空白处右键弹出菜单,选择“在外部终端窗口打开”,打开命令行工具,输入以下指令: 1> 初始化:…...

Docker、Docker-compose、K8s、Docker swarm之间的区别
1.Docker docker是一个运行于主流linux/windows系统上的应用容器引擎,通过docker中的镜像(image)可以在docker中构建一个独立的容器(container)来运行镜像对应的服务; 例如可以通过mysql镜像构建一个运行mysql的容器,既可以直接进入该容器命…...
SpringAI实现AI应用-使用redis持久化聊天记忆
SpringAI实战链接 1.SpringAl实现AI应用-快速搭建-CSDN博客 2.SpringAI实现AI应用-搭建知识库-CSDN博客 3.SpringAI实现AI应用-内置顾问-CSDN博客 4.SpringAI实现AI应用-使用redis持久化聊天记忆-CSDN博客 5.SpringAI实现AI应用-自定义顾问(Advisor)…...
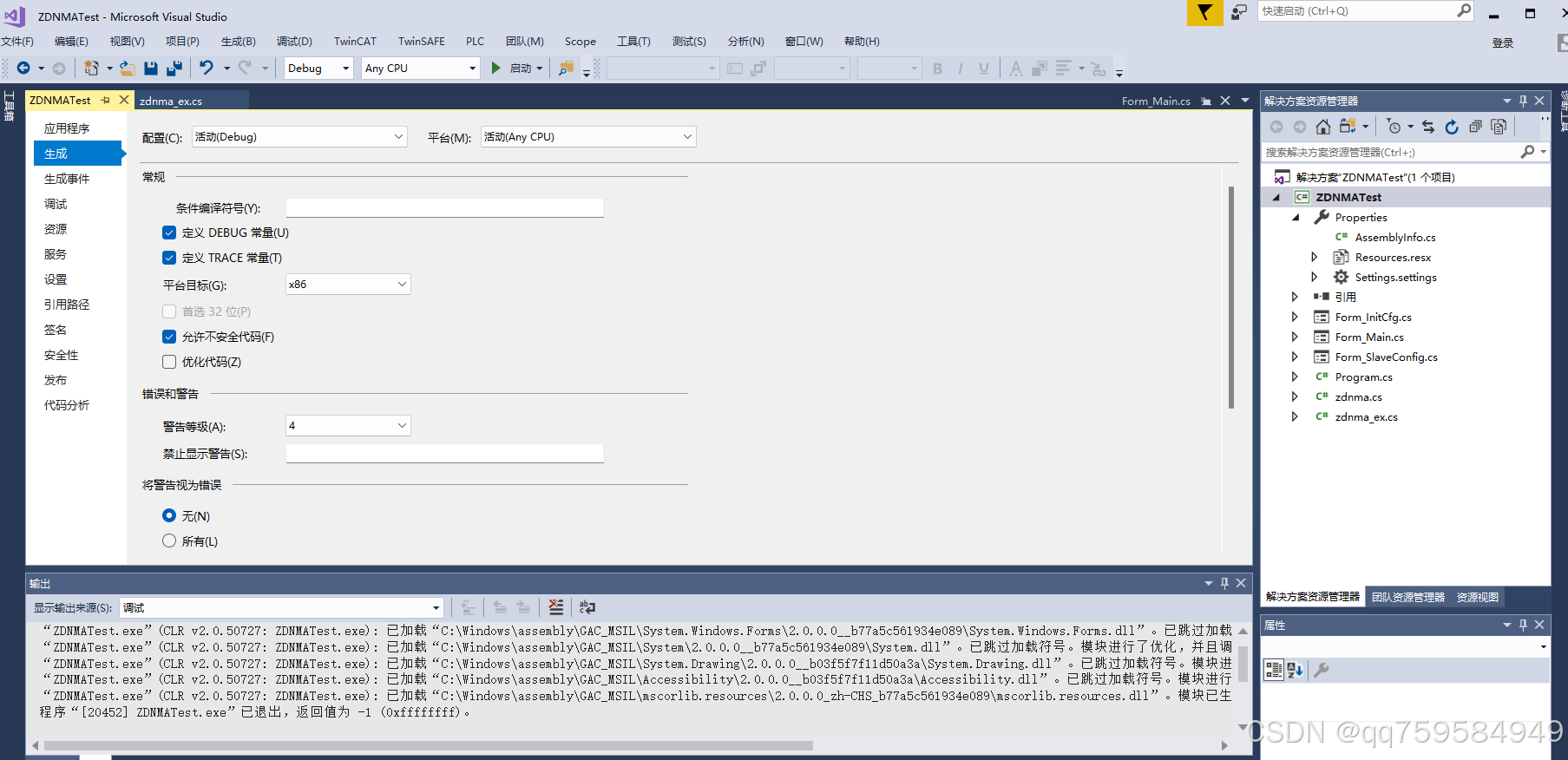
C#问题 加载格式不正确解决方法
出现上面问题 解决办法:C#问题 改成x86 不要选择anycpu...
)
VTK|结合qt创建通用按钮控制显隐(边框、坐标轴、点线面)
文章目录 增加边框BoundingBox添加addBoundingBox添加BoundingBox控制按钮点击按钮之后的槽函数 添加坐标轴增加点线面显隐控制按钮添加控制点线面显隐的按钮到三维显示界面控制面显示槽函数控制线显示槽函数控制点显示槽函数 增加边框BoundingBox 增加边框BoundingBox并通过按…...
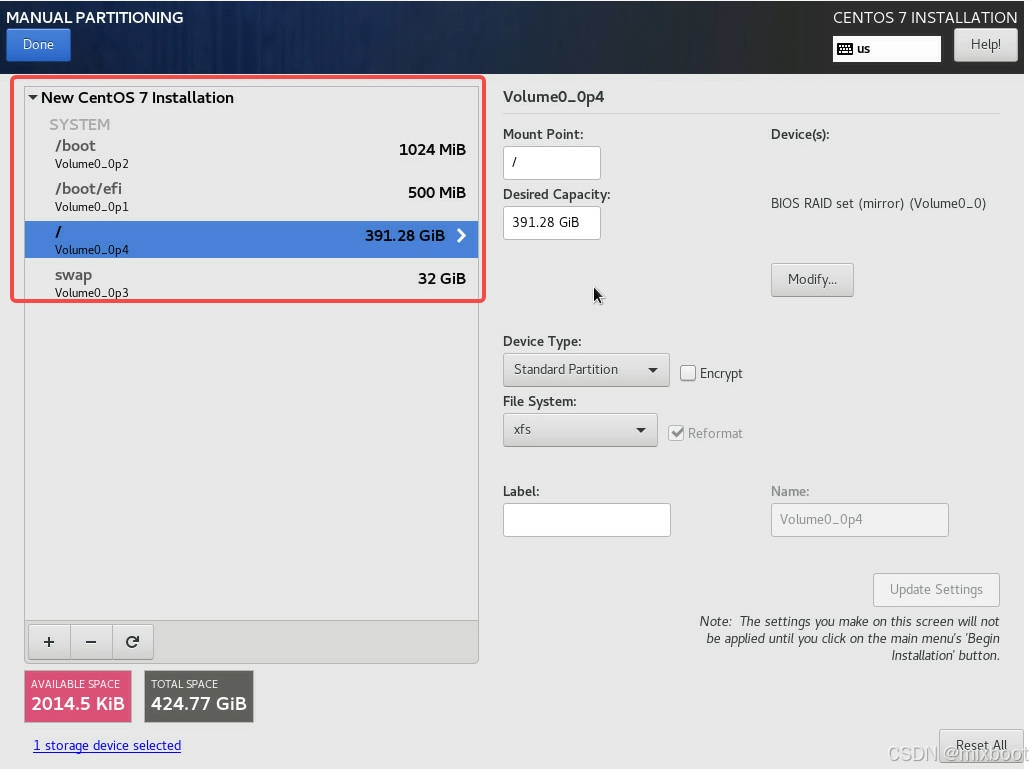
CentOS 7.9 安装详解:手动分区完全指南
CentOS 7.9 安装详解:手动分区完全指南 为什么需要手动分区?CentOS 7.9 基本分区说明1. /boot/efi 分区2. /boot 分区3. swap 交换分区4. / (根) 分区 可选分区(进阶设置)5. /home 分区6. /var 分区7. /tmp 分区 分区方案建议标准…...

在过滤器中获取body中的json数据并且使得后续的controller层也能获取使用
前景提示: ①我需要在filter中获取到json数据->对key名首字母进行排序,然后拼接,进行验签 ②所以就需要在filer获取到json的数据,因为请求数据是一次性读取的流。如果过滤器中调用了request.json或request.get_json()ÿ…...
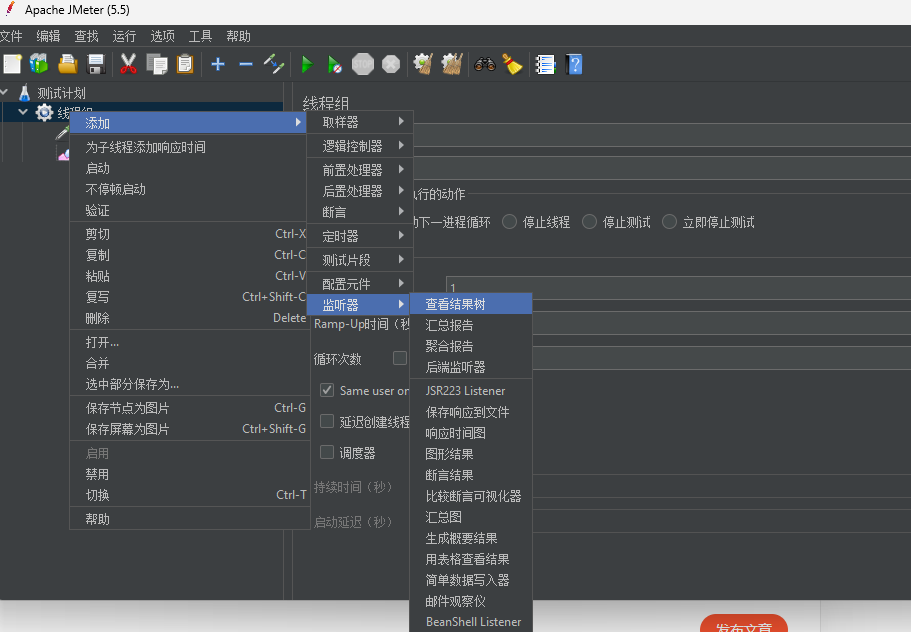
如何使用测试软件 Jmeter
第一步,点击 编辑 添加线程组 第二步,右键单击线程组,添加取样器 HTTP 请求 第三步,设置请求路径 第四步,添加 查看结果树 用于查看请求响应 最后点击绿色小三角启动即可...
2025盘古石初赛WP
来不及做,还有n道题待填坑 文章目录 手机取证 Mobile Forensics分析安卓手机检材,手机的IMSI是? [答案格式:660336842291717]养鱼诈骗投资1000,五天后收益是? [答案格式:123]分析苹果手机检材&a…...