杆件的拉伸与压缩变形
杆件的拉伸与压缩
第一题
Q u e s t i o n \mathcal{Question} Question
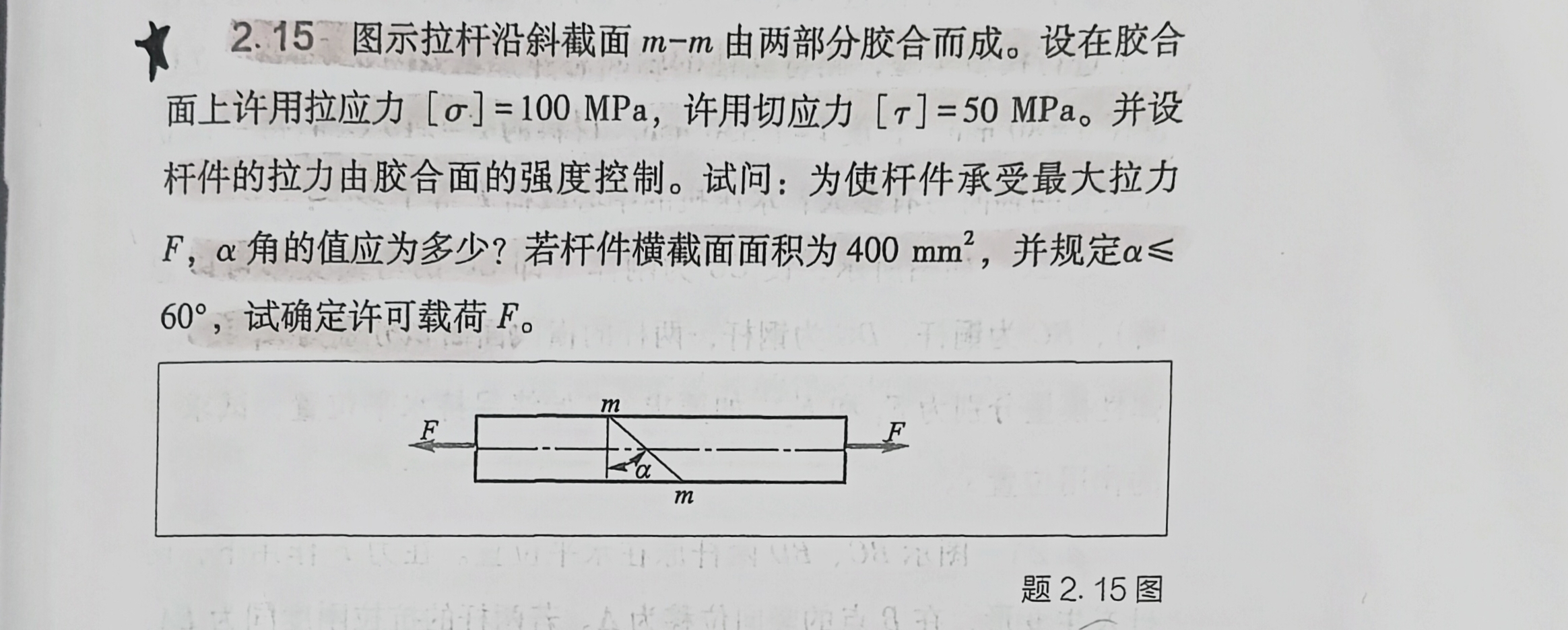
图示拉杆沿斜截面 m − m m-m m−m由两部分胶合而成。设在胶合面上许用拉应力 [ σ ] = 100 MPa [\sigma]=100\text{MPa} [σ]=100MPa,许用切应力 [ τ ] = 50 MPa [\tau]=50\text{MPa} [τ]=50MPa。并设杆件的拉力由胶合面的强度控制。试问:
- 为使杆件承受最大拉力 F F F, α \alpha α角的值应为多少?
- 若杆件横截面面积为 400 mm 2 400\text{mm}^2 400mm2,并规定 α ≤ 6 0 ∘ \alpha\leq60^{\circ} α≤60∘,试确定许可载荷 F F F。
A n s w e r \mathcal{Answer} Answer
由拉伸杆斜截面上的应力公式:
σ α = F A cos 2 α \begin{equation} \sigma_{\alpha}=\dfrac{F}{A}\cos^2 \alpha \end{equation} σα=AFcos2α
τ α = F A sin α cos α \begin{equation} \tau_{\alpha}=\dfrac{F}{A}\sin\alpha\cos\alpha \end{equation} τα=AFsinαcosα
该问题转化为以下最优化问题:
max F \max F maxF
s.t. { σ α = F A cos 2 α ≤ [ σ ] τ α = F A sin α cos α ≤ [ τ ] \begin{aligned} &\textbf{s.t.} \begin{cases} \sigma_{\alpha}=\dfrac{F}{A}\cos^{2}\alpha \leq [\sigma] \\ \tau_{\alpha}=\dfrac{F}{A}\sin\alpha\cos\alpha \leq [\tau] \end{cases} \end{aligned} s.t.⎩ ⎨ ⎧σα=AFcos2α≤[σ]τα=AFsinαcosα≤[τ]
在问题一的背景下:
α 0 = arctan [ τ ] [ σ ] = 26. 6 ∘ \alpha_0=\arctan\dfrac{[\tau]}{[\sigma]}=26.6^{\circ} α0=arctan[σ][τ]=26.6∘
在问题二的背景下:
F max = A [ σ ] cos 2 α 0 = 50 kN F_{\max}=\dfrac{A[\sigma]}{\cos^2\alpha_0}=50\text{kN} Fmax=cos2α0A[σ]=50kN
第二题
Q u e s t i o n \mathcal{Question} Question
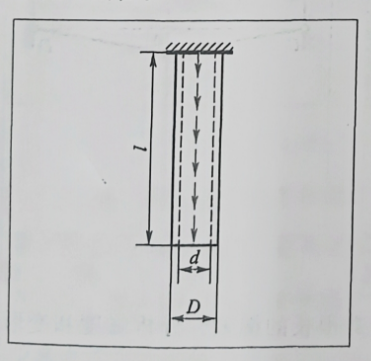
重量为 W W W 的均质圆形等截面空心长钢杆,长度为 l l l,内径为 d d d,外径为 D D D。施工的某一过程中需要将其竖直悬吊于空中。若材料的弹性模量为 E E E,试求此时杆件在自重作用下的伸长量 Δ l \Delta l Δl。
A n s w e r \mathcal{Answer} Answer
取微元,其受轴力:
F N ( x ) = W l ( l − x ) F_N(x)=\frac{W}{l}(l-x) FN(x)=lW(l−x)
由胡克定律:
d ( δ l ) = F N d x E A \text{d}(\delta l)=\dfrac{F_{N}\text{d}x}{EA} d(δl)=EAFNdx
两边同时积分得到:
∫ L d ( δ l ) = ∫ 0 l F N d x E A \int_L\text{d}(\delta l)=\int_{0}^{l}\dfrac{F_{N}\text{d}x}{EA} ∫Ld(δl)=∫0lEAFNdx
故
Δ l = 2 l W E π ( D 2 − d 2 ) \Delta l=\dfrac{2lW}{E\pi \left(D^2-d^2\right)} Δl=Eπ(D2−d2)2lW
第三题
Q u e s t i o n \mathcal{Question} Question
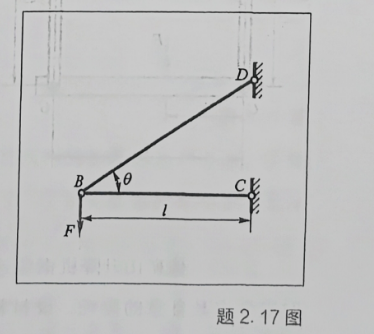
在图示杆系中, B C BC BC和 B D BD BD两杆的材料相同,且抗拉和抗压许用应力相等,同为 [ σ ] [\sigma] [σ]。为使杆系使用的材料最省,试求夹角 θ \theta θ的值。
A n s w e r \mathcal{Answer} Answer
首先,分析 B B B 铰链的受力,根据平衡条件:
{ ∑ F x = 0 , F N 2 − F N 1 cos θ = 0 ∑ F y = 0 , F N 1 sin θ − F = 0 \begin{cases} \sum F_x = 0, & F_{N2} - F_{N1}\cos\theta = 0 \\ \sum F_y = 0, & F_{N1}\sin\theta - F = 0 \end{cases} {∑Fx=0,∑Fy=0,FN2−FN1cosθ=0FN1sinθ−F=0
解上述两式可得:
F N 1 = F sin θ , F N 2 = F cot θ F_{N1} = \frac{F}{\sin\theta}, \quad F_{N2} = F\cot\theta FN1=sinθF,FN2=Fcotθ
最合理的情况是两杆同时达到许用应力值,即:
σ 1 = F N 1 A 1 = [ σ ] , σ 2 = F N 2 A 2 = [ σ ] \sigma_1 = \frac{F_{N1}}{A_1} = [\sigma], \quad \sigma_2 = \frac{F_{N2}}{A_2} = [\sigma] σ1=A1FN1=[σ],σ2=A2FN2=[σ]
将 F N 1 F_{N1} FN1、 F N 2 F_{N2} FN2 表达式代入上式,可得 B D BD BD、 B C BC BC 杆的截面面积分别为:
A 1 = F sin θ [ σ ] , A 2 = F cot θ [ σ ] A_1 = \frac{F}{\sin\theta [\sigma]}, \quad A_2 = \frac{F\cot\theta}{[\sigma]} A1=sinθ[σ]F,A2=[σ]Fcotθ
结构的体积为:
V = A 1 L 1 + A 2 L 2 = F l sin θ [ σ ] cos θ + F l cos θ sin θ [ σ ] = F l [ σ ] ( 1 + cos 2 θ sin θ cos θ ) = F l [ σ ] ( sin 2 θ + 2 cos 2 θ sin θ cos θ ) = F l [ σ ] ( tan θ + 2 cot θ ) \begin{align*} V &= A_1 L_1 + A_2 L_2 \\ &= \frac{Fl}{\sin\theta [\sigma] \cos\theta} + \frac{Fl\cos\theta}{\sin\theta [\sigma]} \\ &= \frac{Fl}{[\sigma]} \left( \frac{1 + \cos^2\theta}{\sin\theta \cos\theta} \right) \\ &= \frac{Fl}{[\sigma]} \left( \frac{\sin^2\theta + 2\cos^2\theta}{\sin\theta \cos\theta} \right) \\ &= \frac{Fl}{[\sigma]} (\tan\theta + 2\cot\theta) \end{align*} V=A1L1+A2L2=sinθ[σ]cosθFl+sinθ[σ]Flcosθ=[σ]Fl(sinθcosθ1+cos2θ)=[σ]Fl(sinθcosθsin2θ+2cos2θ)=[σ]Fl(tanθ+2cotθ)
对体积 V V V 求导,体积最小的条件是:
d V d θ = F l [ σ ] ( 1 cos 2 θ − 2 sin 2 θ ) = F l [ σ ] ( sin 2 θ − 2 cos 2 θ sin 2 θ cos 2 θ ) = 0 \frac{dV}{d\theta} = \frac{Fl}{[\sigma]} \left( \frac{1}{\cos^2\theta} - \frac{2}{\sin^2\theta} \right) = \frac{Fl}{[\sigma]} \left( \frac{\sin^2\theta - 2\cos^2\theta}{\sin^2\theta \cos^2\theta} \right) = 0 dθdV=[σ]Fl(cos2θ1−sin2θ2)=[σ]Fl(sin2θcos2θsin2θ−2cos2θ)=0
解上式得:
2 cos 2 θ − sin 2 θ = 0 ⟹ tan 2 θ = 2 ⟹ θ = 54. 7 ∘ 2\cos^2\theta - \sin^2\theta = 0 \implies \tan^2\theta = 2 \implies \theta = 54.7^\circ 2cos2θ−sin2θ=0⟹tan2θ=2⟹θ=54.7∘
所以,使杆系使用材料最省的夹角为 θ = 54. 7 ∘ \theta = 54.7^\circ θ=54.7∘。
相关文章:
杆件的拉伸与压缩变形
杆件的拉伸与压缩 第一题 Q u e s t i o n \mathcal{Question} Question 图示拉杆沿斜截面 m − m m-m m−m由两部分胶合而成。设在胶合面上许用拉应力 [ σ ] 100 MPa [\sigma]100\text{MPa} [σ]100MPa,许用切应力 [ τ ] 50 MPa [\tau]50\text{MPa} [τ]50MP…...

深入解析Vue3中ref与reactive的区别及源码实现
深入解析Vue3中ref与reactive的区别及源码实现 前言 Vue3带来了全新的响应式系统,其中ref和reactive是最常用的两个API。本文将从基础使用、核心区别到源码实现,由浅入深地分析这两个API。 一、基础使用 1. ref import { ref } from vueconst count…...

Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库
Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库 在 Makefile 中同时链接同一个库的静态库(.a)和动态库(.so)时,具体哪个库生效取决于链接顺序和编译器行为。以下是详细分析…...

企业开发平台大变革:AI 代理 + 平台工程重构数字化转型路径
在企业数字化转型的浪潮中,开发平台正经历着前所未有的技术革命。从 AST(抽象语法树)到 AI 驱动的智能开发,从微服务架构到信创适配,这场变革不仅重塑了软件开发的底层逻辑,更催生了全新的生产力范式。本文…...

《汽车噪声控制》复习重点
题型 选择 填空 分析 计算 第一章 噪声定义 不需要的声音,妨碍正常工作、学习、生活,危害身体健康的声音,统称为噪声 噪声污染 与大气污染、水污染并称现代社会三大公害 声波基本概念 定义 媒质质点的机械振动由近及远传播&am…...

Linux——MySQL约束与查询
表的约束 真正约束字段的是数据类型,但是数据类型约束很单一,需要有一些额外的约束,更好的保证数据的合 法性,从业务逻辑角度保证数据的正确性。比如有一个字段是email,要求是唯一的。 表的约束是为了防止插入不合法的…...
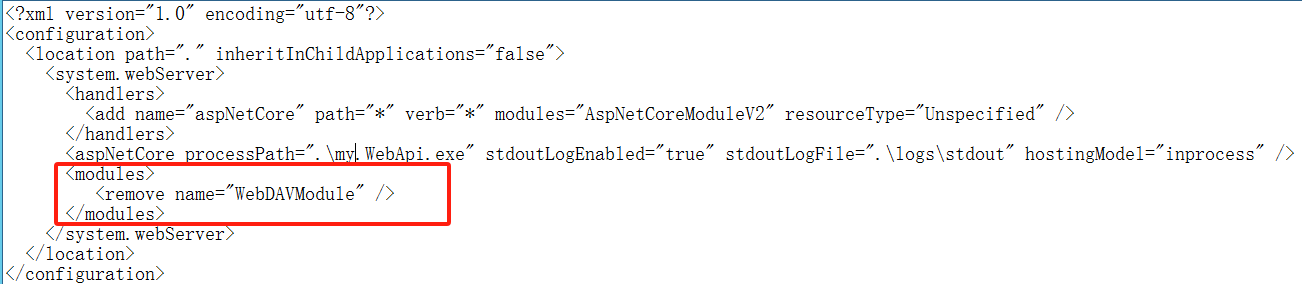
Asp.Net Core IIS发布后PUT、DELETE请求错误405
一、方案1 1、IIS管理器,处理程序映射。 2、找到aspNetCore,双击。点击请求限制...按钮,并在谓词选项卡上,添加两者DELETE和PUT. 二、方案2 打开web.config文件,添加<remove name"WebDAVModule" />&…...
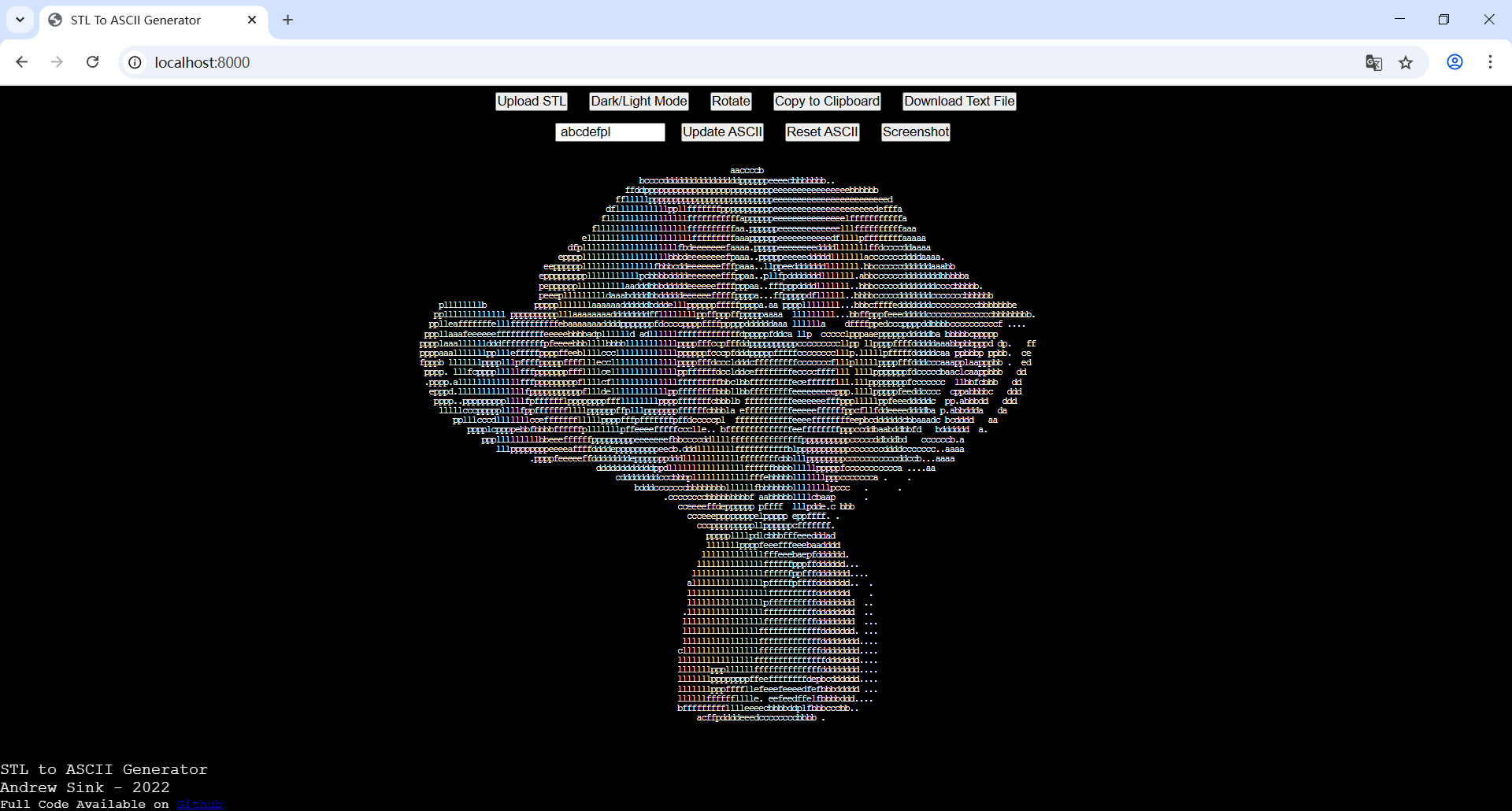
STL-to-ASCII-Generator 实用教程
参阅:STL-to-ASCII-Generator 使用教程 开源项目网址 下载 STL-to-ASCII-Generator-main.zip 解压到 D:\js\ index.html 如下 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta id"ascii&q…...

关于数据库查询速度优化
本人接手了一个关于项目没有任何文档信息的代码,代码也没有相关文档说明信息!所以在做数据库查询优化的时候不敢改动。 原因1: 老板需要我做一个首页的统计查询。明明才几十万条数据,而且我加了筛选条件为什么会这么慢ÿ…...

sql serve 多表联合查询,根据一个表字段值动态改变查询条件
在SQL Server中进行多表联合查询时,如果需要根据一个表的字段值动态改变查询条件,可以采用几种不同的方法来实现这一需求。这里介绍两种常用的方法:CASE表达式和动态SQL。 方法1: 使用 CASE 表达式 这种方法适合于查询条件可以在单个SQL语句…...

巡检机器人数据处理技术的创新与实践
摘要 随着科技的飞速发展,巡检机器人在各行业中逐渐取代人工巡检,展现出高效、精准、安全等显著优势。当前,巡检机器人已从单纯的数据采集阶段迈向对采集数据进行深度分析的新阶段。本文探讨了巡检机器人替代人工巡检的现状及优势,…...
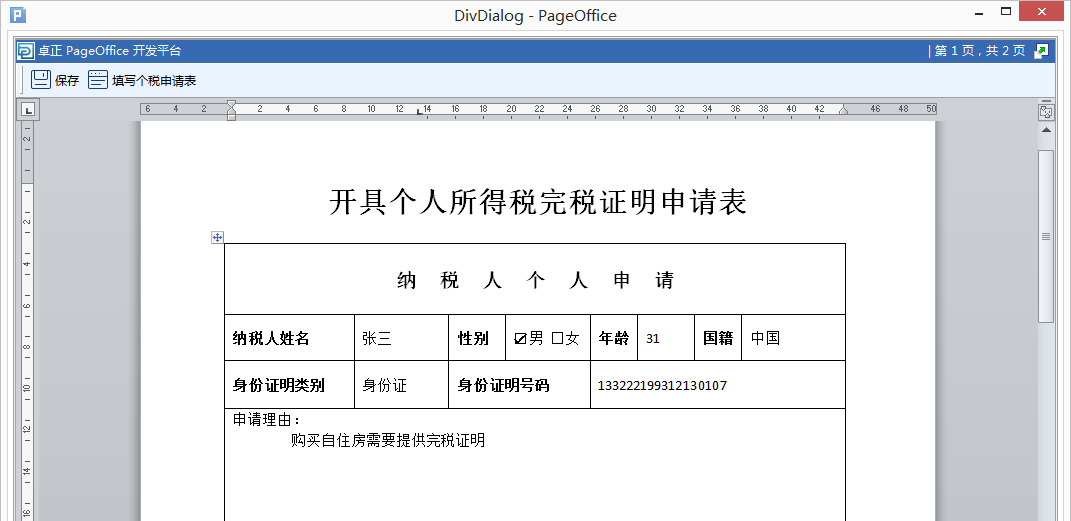
国产linux系统(银河麒麟,统信uos)使用 PageOffice 在线打开Word文件,并用前端对话框实现填空填表
不管是政府机关、公司企业,还是金融行业、教育行业等单位,在办公过程中都经常需要填写各种文书和表格,比如通知、报告、登记表、计划表、申请表等。这些文书和表格往往是用Word文件制作的模板,比方说一个通知模板中经常会有“关于…...

Kubernetes应用发布方式完整流程指南
Kubernetes(K8s)作为容器编排领域的核心工具,其应用发布流程体现了自动化、弹性和可观测性的优势。本文将通过一个Tomcat应用的示例,详细讲解从配置编写到高级发布的完整流程,帮助开发者掌握Kubernetes应用部署的核心步…...

视频编解码学习8之视频历史
视频技术的发展历史可以追溯到19世纪,至今已跨越近200年。以下是视频技术发展的主要阶段和里程碑: 1. 早期探索阶段(19世纪-1920年代) 1832年:约瑟夫普拉托(Joseph Plateau)发明"费纳奇镜&…...

RabbitMQ-高级特性1
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言消息确认机制介绍手动确认方法代码前言代码编写消息确认机制的演示自动确认automanual 持久化介绍交换机持久化队列持久化消息持久化 持久化代码持久化代码演示…...
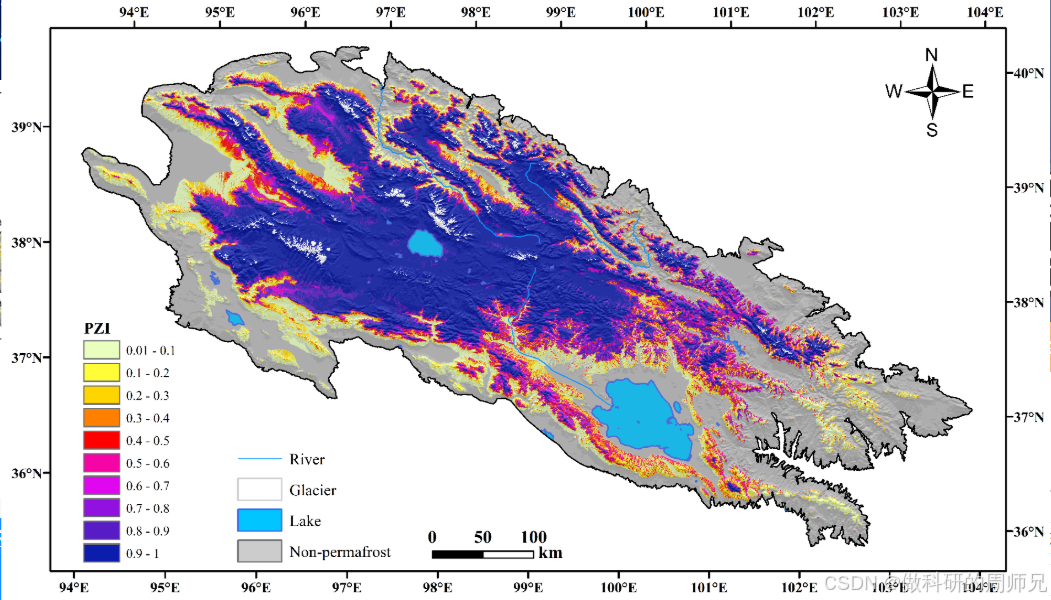
青藏高原东北部祁连山地区250m分辨率多年冻土空间分带指数图(2023)
时间分辨率:10年 < x < 100年空间分辨率:100m - 1km共享方式:开放获取数据大小:24.38 MB数据时间范围:近50年来元数据更新时间:2023-10-08 数据集摘要 多年冻土目前正在经历大规模的退化,…...

论文分享➲ arXiv2025 | TTRL: Test-Time Reinforcement Learning
TTRL: Test-Time Reinforcement Learning TTRL:测试时强化学习 https://github.com/PRIME-RL/TTRL 📖导读:本篇博客有🦥精读版、🐇速读版及🤔思考三部分;精读版是全文的翻译,篇幅较…...
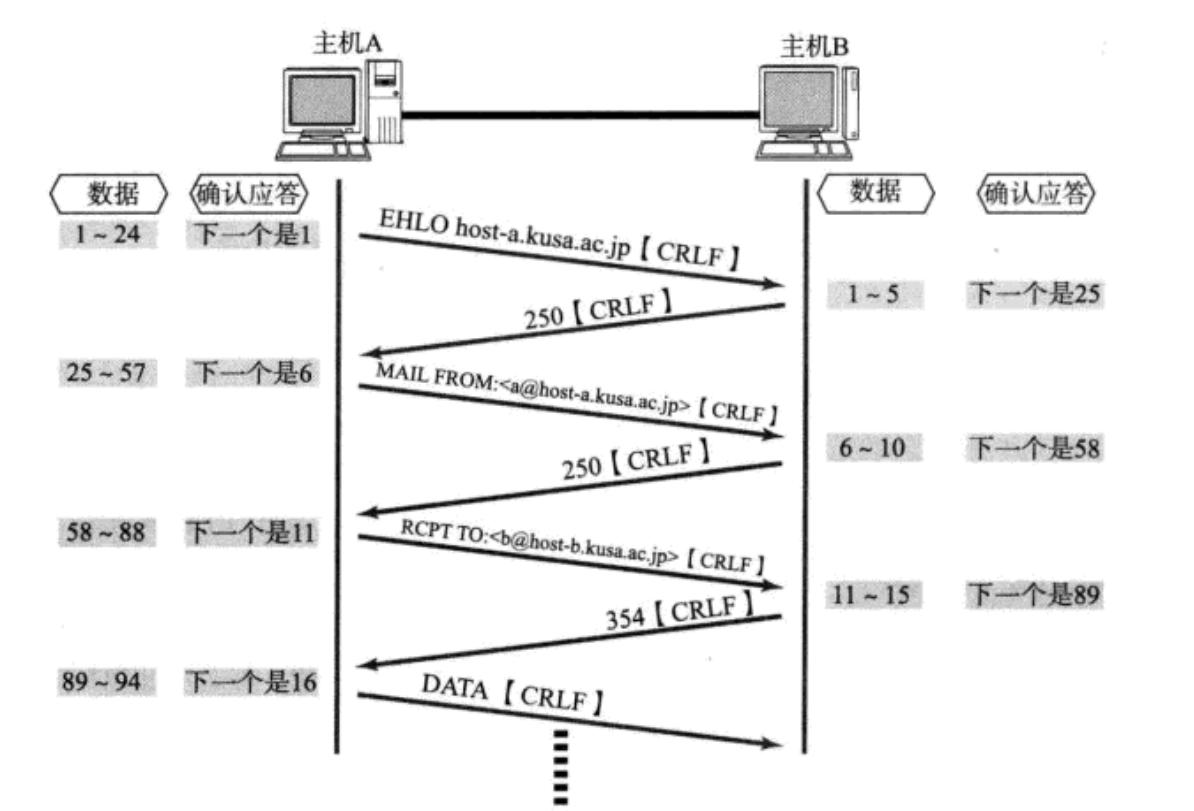
【计算机网络-传输层】传输层协议-TCP核心机制与可靠性保障
📚 博主的专栏 🐧 Linux | 🖥️ C | 📊 数据结构 | 💡C 算法 | 🅒 C 语言 | 🌐 计算机网络 上篇文章:传输层协议-UDP 下篇文章: 网络层 我们的讲解顺序是&…...

项目管理从专家到小白
敏捷开发 Scrum 符合敏捷开发原则的一种典型且在全球使用最为广泛的框架。 三个角色 产品负责人Product Ower:专注于了解业务、客户和市场要求,然后相应地确定工程团队需要完成的工作的优先顺序。 敏捷教练Scrum Master:确保 Scrum 流程顺…...
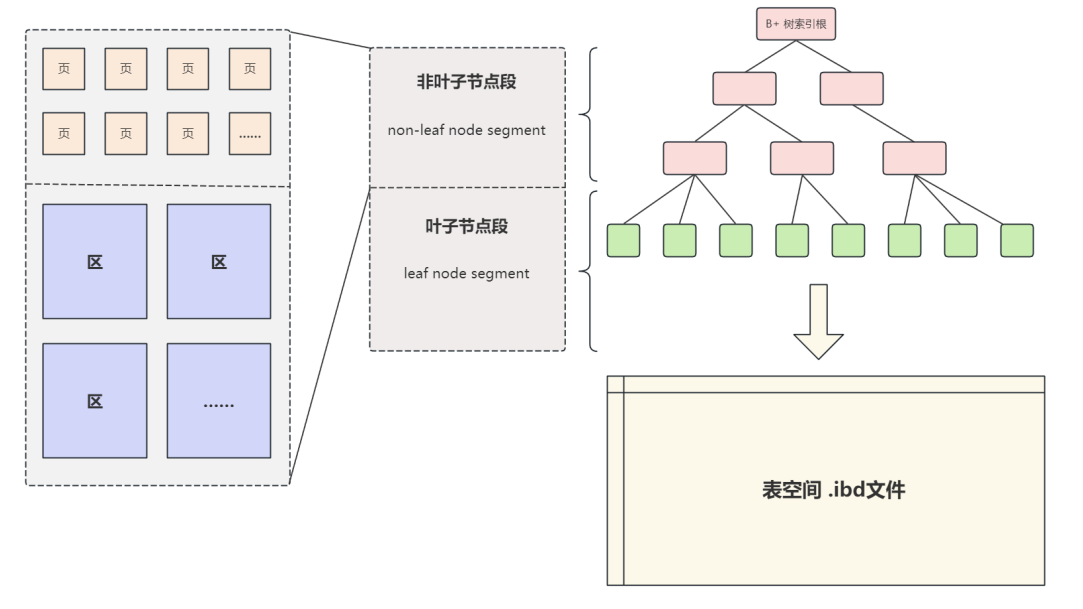
InnoDB结构与表空间文件页的详解
目录 1.InnoDB的概览 表空间文件在哪里? 为什么要设计成内存结构和磁盘结构? 表空间与表空间文件关系? 用户数据如何在表空间文件存储? 2.页 如何设置页的大小? 页的结构及在表空间的位置? 页头包…...
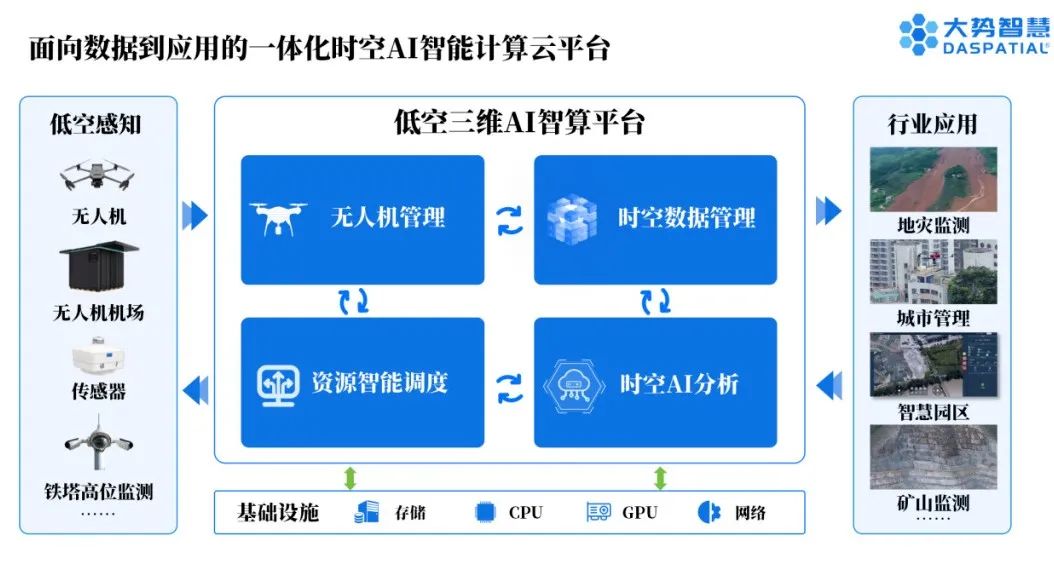
世界无人机大会将至,大势智慧以“AI+实景三维”赋能低空经济
近日,“2025第九届世界无人机大会暨国际低空经济与无人系统博览会和第十届深圳国际无人机展览会”组委会召开新闻发布会,宣布本届大会主题为“步入低空经济新时代”,将于5月23-25日在深圳会展中心(福田)举行࿰…...
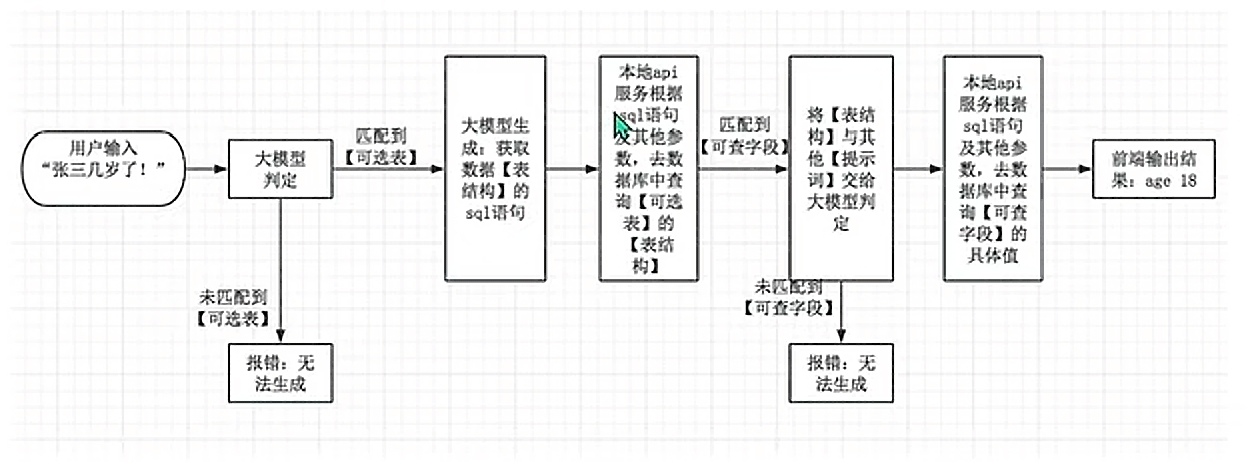
AI 驱动数据库交互技术路线详解:角色、提示词工程与输入输出分析
引言 在人工智能与数据库深度融合的趋势下,理解AI在数据库交互流程中的具体角色、提示词工程的运用以及各步骤的输入输出情况,对于把握这一先进技术路线至关重要。本文将对其展开详细剖析。 一、AI 在数据库交互流程中的角色 (一࿰…...

AI 助力,轻松进行双语学术论文翻译!
在科技日新月异的今天,学术交流中的语言障碍仍然是科研工作者面临的一大挑战。尤其是对于需要查阅大量外文文献的学生、科研人员和学者来说,如何高效地理解和翻译复杂的学术论文成为了一大难题。然而,由Byaidu团队推出的开源项目PDFMathTrans…...
stm32错误记录
1.使用LCD屏幕时,只用st-link时,亮度很暗,需要用usb数据线额外给屏幕供电; 2.移植freertos到f103c8t6芯片时,工程没有错误,但单片机没有反应; 需要将堆的大小改成10*1024; 3.在找已经…...

Baumer工业相机堡盟工业相机的工业视觉中为什么偏爱“黑白相机”
Baumer工业相机堡盟工业相机的工业视觉中为什么偏爱“黑白相机” Baumer工业相机为什么偏爱“黑白相机”?工业视觉中为什么倾向于多使用黑白相机黑白相机在工业视觉中的应用场景有哪些? Baumer工业相机 工业相机是常用与工业视觉领域的常用专业视觉…...

前端取经路——现代API探索:沙僧的通灵法术
大家好,我是老十三,一名前端开发工程师。在现代Web开发中,各种强大的API就像沙僧的通灵法术,让我们的应用具备了超乎想象的能力。本文将带你探索从离线应用到实时通信,从多线程处理到3D渲染的九大现代Web API,让你的应用获得"通灵"般的超能力。 在前端取经的第…...
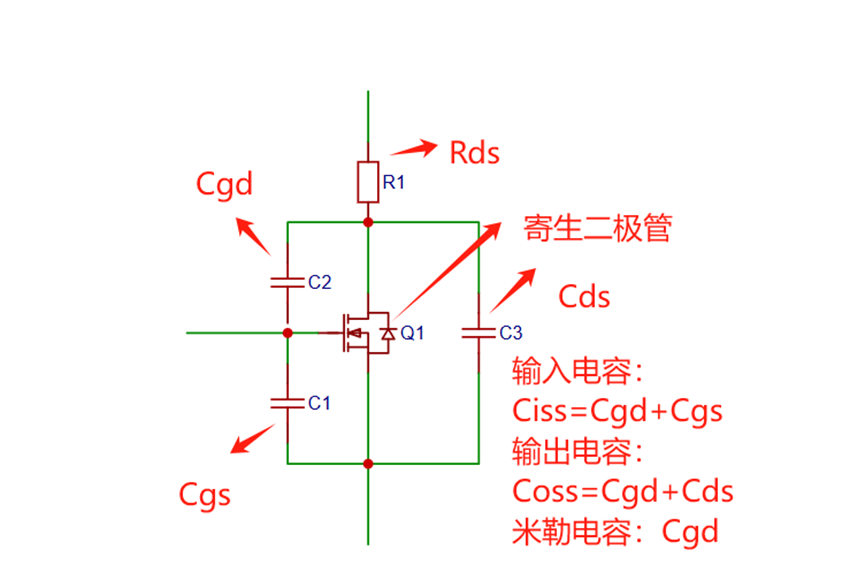
一个电平转换电路导致MCU/FPGA通讯波形失真的原因分析
文章目录 前言一、问题描述二、原因分析三、 仿真分析四、 尝试的解决方案总结前言 一、问题描述 一个电平转换电路,800kHz的通讯速率上不去,波形失真,需要分析具体原因。输出波形如下,1码(占空比75%)低于5V,0码(占空比25%)低于4V。,严重失真。 电平转换电路很简单,M…...
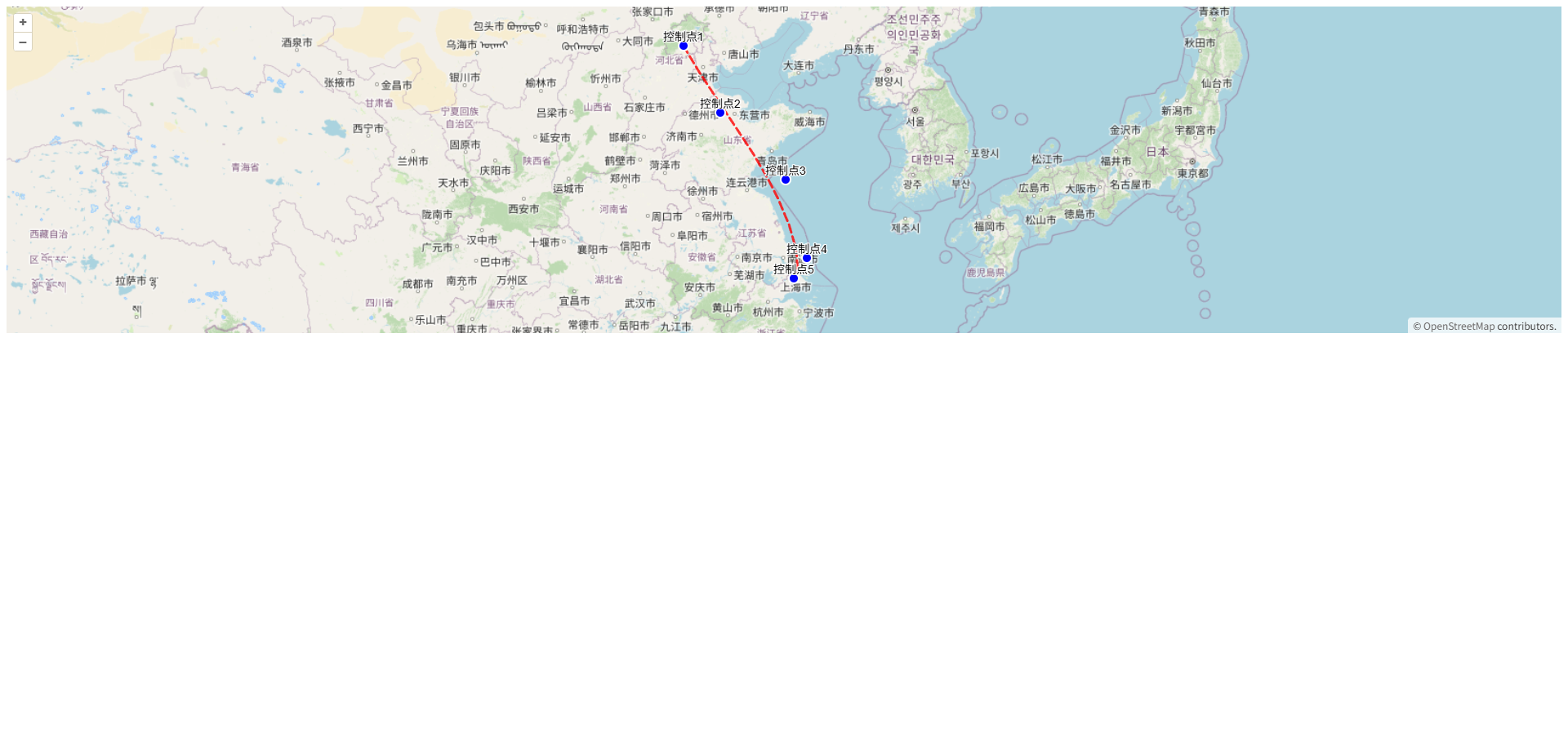
OpenLayers根据任意数量控制点绘制贝塞尔曲线
以下是使用OpenLayers根据任意数量控制点绘制贝塞尔曲线的完整实现方案。该方案支持三个及以上控制点,使用递归算法计算高阶贝塞尔曲线。 实现思路 贝塞尔曲线原理:使用德卡斯特里奥算法(De Casteljau’s Algorithm)递归计算任意…...
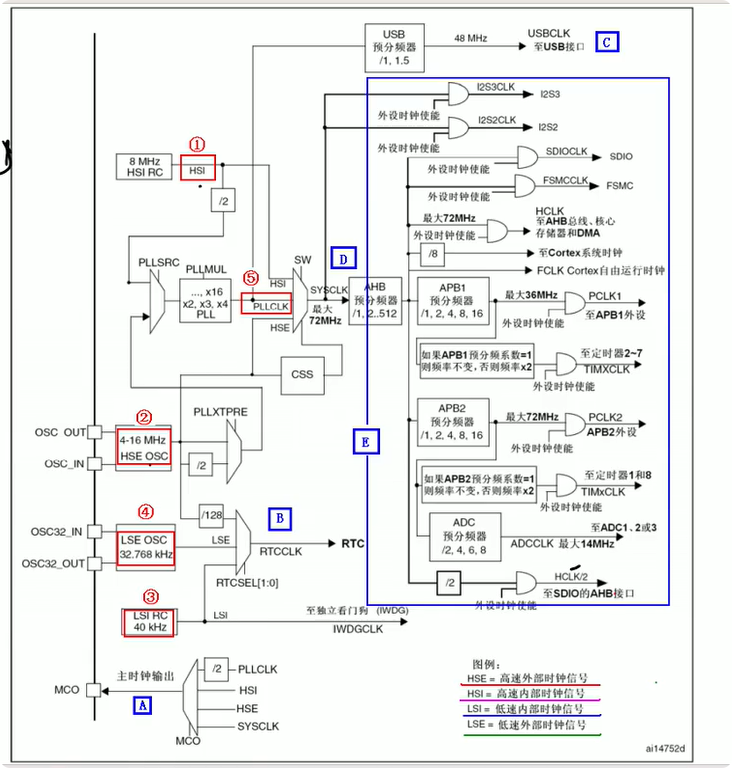
STM32--RCC--时钟
教程 系统时钟 RCC RCC(Reset and Clock Control)是STM32微控制器中管理时钟和复位系统的关键外设模块,负责整个芯片的时钟树配置和复位控制。 RCC主要功能 时钟系统管理: 内部/外部时钟源选择 时钟分频/倍频配置 各外设时钟门…...

uniapp 不同路由之间的区别
在UniApp中,路由跳转是实现页面导航的核心功能,常见的路由跳转方式包括navigateTo、redirectTo、reLaunch、switchTab和navigateBack。这些方法在跳转行为和适用场景上有所不同。 一、路由跳转的类型与区别 1. uni.navigateTo(OBJECT) 特点࿱…...