初始图形学(7)
上一章完成了相机类的实现,对之前所学的内容进行了封装与整理,现在要学习新的内容。
抗锯齿
我们放大之前渲染的图片,往往会发现我们渲染的图像边缘有尖锐的"阶梯"性质。这种阶梯状被称为"锯齿"。当真实的相机拍照时,边缘通常没有锯齿,这是因为真实的边缘时前景和背景颜色的混合,而不是简单的二值化。而且真实的世界是连续的,而我们渲染的图像是离散的,也就是说真实世界具有无限的分辨率 ,而我们的=图像的分辨率是有限的。我们可以通过对每个像素进行多次采样并取平均值,来近似实现此效果。
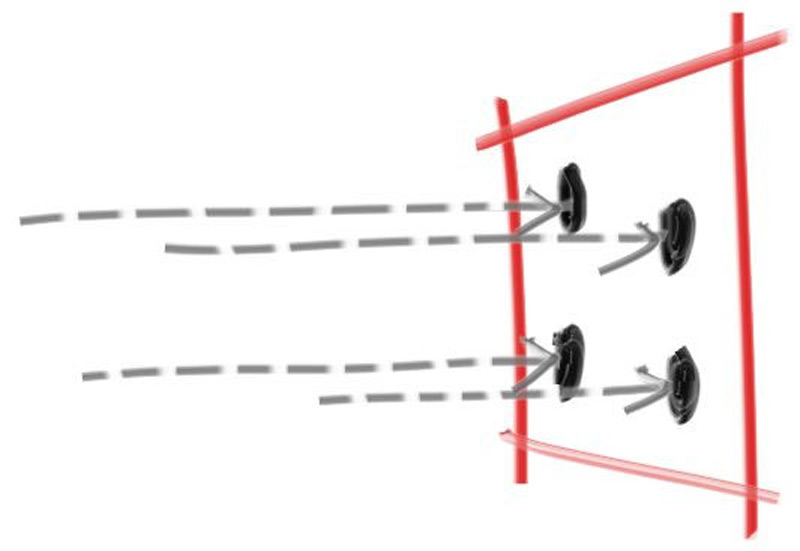
我们目前采用的采样方式被称为”点采样“,即在每个像素的中心发射一条射线来进行采样,但是同时也面临一个问题,当我们对较远的地方的图像进行采样时,可能会出现"非黑即白"的情况。但实际上我们应该看到的是灰色,而不是黑白分明的点。这是我们的眼睛很自然的对远处的图形进行了处理,而这种处理正是我们想要的效果。
所以为了解决这个问题,我们采用"多采样"的方式,来对我们的图片实现采样。我们需要对像素周围的光线进行采样,然后对采样的结果进行整合,以近似真实世界的连续效果。
为了实现这种效果,我们采用最为简单的方式,我们对以像素为中心的正方形区域进行采样,这个正方形区域会延伸到每个相邻的像素的一般位置。这个方法可能效果一般,但是便于实现,具体的内容可以参考文献像素不是一个小方块,下面是一个多采样草图
数学工具:随机数生成
为了实现函数的多采样,我们需要一个能够返回真实随机数的随机数生成器。这个函数为我们返回一个(0,1)的随机数,我们可以使用标准库<cstdlib>中的std::rand()函数,这个函数会返回一个[0,RAND_MAX]之间的随机整数。我们通过以下改动,可以得到真正的随机数函数,我们写在rtweekend.h中:
#include <cmath>
#include <cstdlib>
#include <iostream>
#include <limits>
#include <memory>
...
//实用函数
inline double degree_to_radius(double degrees){return degrees * pi / 180.0;
}
inline double random_double(){//返回[0,1)的数return std::rand() / (RAND_MAX + 1.0);
}
inline double random_double(double min,double max){//返回[min,max)的数return min + (max - min)*random_double();
}
不过由于rand()具有随机性较差等特点,所以在C++11标准下有其他的随机数函数写法:
...
#include <random>
...
inline double random_double(){static std::uniform_real_distribution<double> distribution(0.0,1.0);static std::mt19937 generator;return distribution(generator);
}
...
不过看不太懂就是了
使用多采样式生成像素
对于由多个样本组成的像素,我们将从像素周围的区域选择样本,并将颜色(光值)平均在一起
我们需要更新我们的write_color()函数以考虑我们的样本数量,不过在此之前,我们需要添加一个用于区间判断的辅助函数interval::clamp(x),以确保最终的结果的颜色分量保持在正确的[0,1]范围:
class interval{
public:
...
//包含double clamp(double x) const{if(x < min) return min;if(x > max) return max;return x;}
接下来我们更新write_color()函数,其包含区间的限制功能:
void write_color(std::ostream& out,const color& pixel_color){auto r = pixel_color.x();auto g = pixel_color.y();auto b = pixel_color.z();//使用区间RGB[0,1]计算RGB值static const interval intensity(0.000,0.999);int rbyte = int (256*intensity.clamp(r));int gbyte = int (256*intensity.clamp(g));int bbyte = int (256*intensity.clamp(b));out << rbyte << ' ' << gbyte << ' ' << bbyte << '\n';
}
这样保证了我们的的rgb分量不会超出[0,1]的范围,这样更加安全。
接下来我们需要更新相机类,以定义和使用一个新的camera::get_ray(i,j)函数,该函数将为每个像素生成不同的样本。这个函数将使用一个新的辅助函数sample_squred(),该函数在以原点为中心的正方形内生成一个随机样本点。然后我们将这个正方形中的随机样本转换为我们当前正在采样的特定像素。
#ifndef RENDER_C___CAMERA_H
#define RENDER_C___CAMERA_H
#include "hittable.h"
class camera{
public:double aspect_radio = 1.0; //图像的宽高比int image_width = 100; //图像宽度的像素数int samples_per_pixel = 10; //每个像素的采样次数
void render(const hittable& world){initialize();
std::cout << "P3\n" << image_width << " " << image_height << "\n255\n";for(int j=0;j<image_height;j++){std::clog << "\rScanlines remaining: " << (image_height - j) << ' ' << std::flush;for(int i=0;i<image_width;i++){color pixel_color(0,0,0);for(int sample = 0;sample < samples_per_pixel; sample++){ray r = get_ray(i,j);pixel_color += ray_color(r,world);}write_color(std::cout,pixel_color*pixel_samples_scale);}}std::clog << "\rDone. \n";}
private:int image_height; //渲染图像的高度double pixel_samples_scale; //每次采样的颜色权重point3 camera_center; //相机的中心point3 pixel00_loc; //像素(0,0)的位置vec3 pixel_delta_u; //向右的偏移值vec3 pixel_delta_v; //向下的偏移值
void initialize(){image_height = int(image_width/aspect_radio);image_height = (image_height < 1) ? 1 : image_height;
pixel_samples_scale = 1.0 / samples_per_pixel;
camera_center = point3 (0,0,0);
//确认视窗的设置auto focal_length = 1.0; //焦距设置auto viewport_height = 2.0;auto viewport_width = viewport_height*(double (image_width)/image_height);
//视图边缘的向量计算auto viewport_u = vec3(viewport_width,0,0);auto viewport_v = vec3(0,-viewport_height,0);//计算视图的像素间的水平竖直增量pixel_delta_u = viewport_u/image_width;pixel_delta_v = viewport_v/image_height;
//计算左上角第一个像素中心的坐标auto viewport_upper_left = camera_center - vec3(0,0,focal_length) - viewport_v/2 - viewport_u/2;pixel00_loc = viewport_upper_left + 0.5*(pixel_delta_u+pixel_delta_v);}
ray get_ray(int i,int j){//构造一个从原点开始的随机采样射线,指向(i,j)像素
auto offset = sample_square();auto pixel_sample = pixel00_loc + ((i+offset.x())*pixel_delta_u) + ((j+offset.y())*pixel_delta_v);
auto ray_origin = camera_center;auto ray_direction = pixel_sample - ray_origin;
return ray(ray_origin,ray_direction);}
vec3 sample_square() const {//返回一个一个随机的点,在[-0.5,-0.5]~[+0.5,+0.5]的单位矩阵内return {random_double() - 0.5, random_double() - 0.5,0};}
color ray_color(ray & r,const hittable& world){hit_record rec;if(world.hit(r,interval(0,infinity),rec)){return 0.5*(rec.normal + color(1,1,1));}
vec3 unit_direction = unit_vector(r.direction());auto a = 0.5*(unit_direction.y()+1.0);return (1.0 - a)*color(1.0,1.0,1.0) + a*color(0.5,0.7,1.0);}
};
#endif //RENDER_C___CAMERA_H
这是新的camera,我们更新了get_ray()和sample_square(),还有新的公有私有属性
接下来设置一下主函数的参数:
int main(){hittable_list world;world.add(make_shared<sphere>(point3(0,0,-1),0.5));world.add(make_shared<sphere>(point3(0,-100.5,-1),100));
camera cam;
cam.aspect_radio = 16.0/9.0;cam.image_width = 400;cam.samples_per_pixel = 100; // 设置采样次数
cam.render(world);
}
这里可以看到左图的锯齿明显减少了,我们的抗锯齿设置的十分成功,今天就到此为止了
相关文章:
初始图形学(7)
上一章完成了相机类的实现,对之前所学的内容进行了封装与整理,现在要学习新的内容。 抗锯齿 我们放大之前渲染的图片,往往会发现我们渲染的图像边缘有尖锐的"阶梯"性质。这种阶梯状被称为"锯齿"。当真实的相机拍照时&a…...
)
Linux NVIDIA 显卡驱动安装指南(适用于 RHEL/CentOS)
📌 一、禁用 Nouveau 开源驱动 NVIDIA 闭源驱动与开源的 nouveau 驱动冲突,需先禁用: if [ ! -f /etc/modprobe.d/blacklist-nouveau.conf ]; thenecho -e "blacklist nouveau\noptions nouveau modeset0" | sudo tee /etc/modpr…...

线程的一些事(2)
在java中,线程的终止,是一种“软性”操作,必须要对应的线程配合,才能把终止落实下去 然而,系统原生的api其实还提供了,强制终止线程的操作,无论线程执行到哪,都能强行把这个线程干掉…...

数据可视化:艺术与科学的交汇点,如何让数据“开口说话”?
数据可视化:艺术与科学的交汇点,如何让数据“开口说话”? 数据可视化,是科技与艺术的结合,是让冰冷的数字变得生动有趣的桥梁。它既是科学——讲究准确性、逻辑性、数据处理的严谨性;又是艺术——强调美感…...
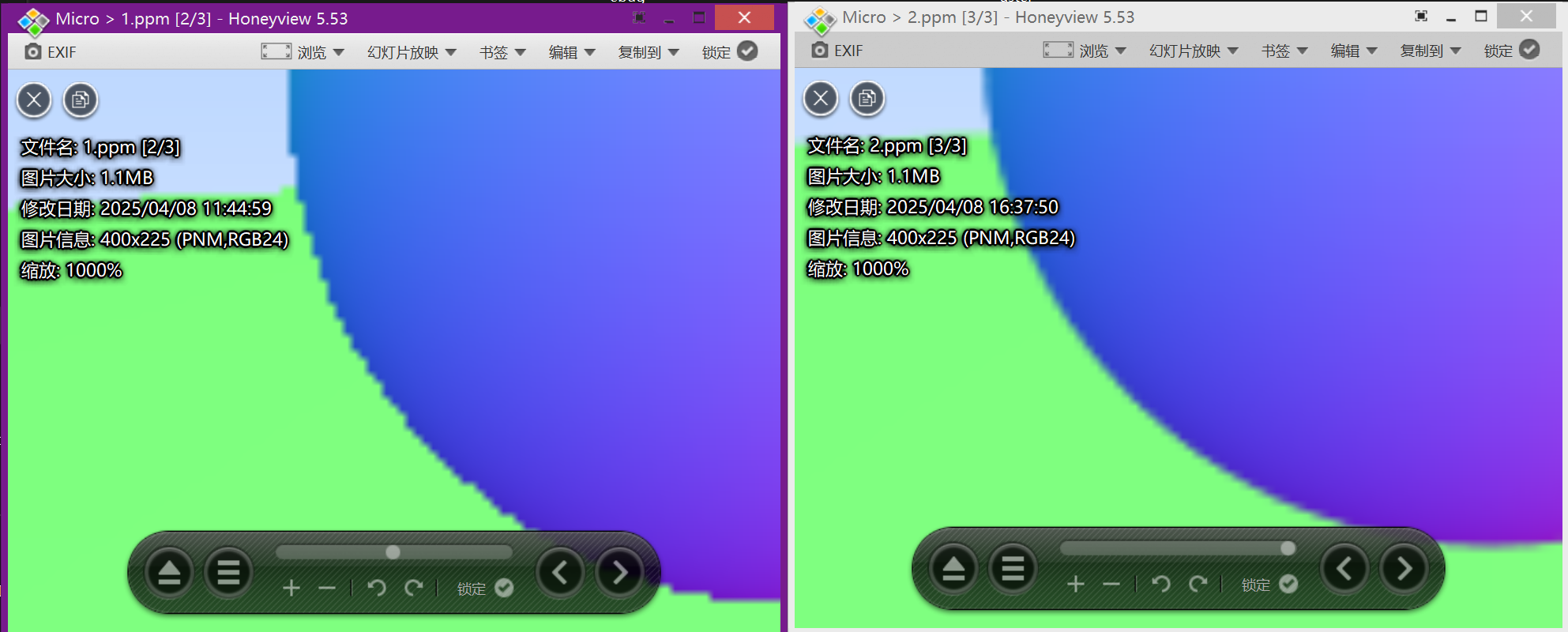
使用lldb看看Rust的HashMap
目录 前言 正文 读取桶的状态 获取键值对 键值对的指针地址 此时,读取数据 读取索引4的键值对 多添加几个键值对 使用i32作为键,&str作为值 使用i32作为键,String作为值 前言 前面使用ldb看了看不同的类型,这篇再使用…...
——版本体系)
Oracle版本、补丁及升级(12)——版本体系
12.1. 版本体系 Oracle作为最流行的一款关系数据库软件产品,其拥有自己一套成熟的版本管理体系。具体版本体系以12c为分界线,前后版本体系分别不同。 12.1.1. 12c之前版本 12c之前的Oracle,版本共有5位阿拉伯数字组成,其中的每位数字,都有各自的含义,具…...
2025最新免费视频号下载工具!支持Win/Mac,一键解析原画质+封面
软件介绍 适用于Windows 2025 最新5月蝴蝶视频号下载工具,免费使用,无广告且免费,支持对原视频和封面进行解析下载,亲测可用,现在很多工具都失效了,难得的几款下载视频号工具,大家且用且珍…...

在 Ubuntu 中配置 Samba 实现「特定用户可写,其他用户只读」的共享目录
需求目标 所有认证用户可访问 Samba 共享目录 /path/to/home;**仅特定用户(如 developer)**拥有写权限;其他用户仅允许读取;禁止匿名访问。 配置步骤 1. 设置文件系统权限 将目录 /home3/guest 的所有权设为 develo…...
Newton GPU 机器人仿真器入门教程(零)— NVIDIA、DeepMind、Disney 联合推出
系列文章目录 目录 系列文章目录 前言 一、快速入门 1.1 实时渲染 1.2 USD 渲染 1.3 示例:创建一个粒子链 二、重要概念 三、API 参考 3.1 求解器 3.1.1 XPBD 求解器 3.1.2 VBD 求解器 3.1.3 MuJoCo 求解器 3.2 关节控制模式 四、Newton 集成 4.1 Is…...

《零基础学机器学习》学习大纲
《零基础学机器学习》学习大纲 《零基础学机器学习》采用对话体的形式,通过人物对话和故事讲解机器学习知识,使内容生动有趣、通俗易懂,降低了学习门槛,豆瓣高分9.1分,作者权威。 接下来的数篇文章,我将用…...

CSS 基础知识分享:从入门到注意事项
什么是CSS? CSS是用于描述HTML或XML文档呈现方式的语言。它控制网页的布局、颜色、字体等视觉表现,让内容与表现分离。 通俗的说,html是骨头,那么css就是他的画皮。 基本语法 CSS规则由两部分组成:选择器和声明块。…...

深入浅出理解JavaScript原型与原型链
先让我们结合生活案例理解原型原型链相关概念,想象一下一个大家庭,有很多成员。 1. 原型 (Prototype) - 家族的共同特征或技能模板 概念对应: 家族中代代相传的共同特征、习惯、或者家族里独有的某个手艺或知识。例子: 假设你们家族的成员普遍都有高个子、善于烹饪一道祖传菜…...

重操旧业,做起了OnlineTool.cc在线工具站
最近闲来无事,做了个在线工具站。 工具不多,起码有:当前IP查询,QRCode二维码生成,图片压缩,JSON格式化,简体繁体转换,等。 使用Astro框架React,Caddy,目前是…...

vue 中的数据代理
在 Vue 中,数据代理(Data Proxy) 是 Vue 实现 MVVM 模式 的关键技术之一。Vue 使用数据代理让你可以通过 this.message 访问 data.message,而不需要写 this.data.message —— 这大大简化了模板和逻辑代码。 我们来深入理解它的本…...

ubuntu安装Go SDK
# 下载最新版 Go 安装包(以 1.21.5 为例) wget https://golang.google.cn/dl/go1.21.5.linux-amd64.tar.gz # 解压到系统目录(需要 root 权限) sudo tar -C /usr/local -xzf go1.21.5.linux-amd64.tar.gz # 使用 Go 官方安装脚本…...
【C++】学习、项目时Debug总结
这里写目录标题 1. 内存问题1.1. 内存泄漏1.1.1. 内存泄漏案例检查方法1.1.2. 主线程提前退出导致【控】1.1.3. PostThreadMessage失败导致的内存泄漏**【控】**1.1.4. SendMessage 时关闭客户端【控】1.1.5. 线程机制导致【**控】**1.1.6. exit(0)导致【…...

26考研——中央处理器_指令流水线_指令流水线的基本概念 流水线的基本实现(5)
408答疑 文章目录 六、指令流水线指令流水线的基本概念流水线的基本实现流水线设计的原则流水线的逻辑结构流水线的时空图表示 八、参考资料鲍鱼科技课件26王道考研书 六、指令流水线 前面介绍的指令都是在单周期处理机中采用串行方法执行的,同一时刻 CPU 中只有一…...
)
Flutter——数据库Drift开发详细教程(三)
目录 参考正文核心API写入(更新、插入、删除)1.更新和删除2.使用 SQL 表达式更新3.插入件4.更新插入5.返回 参考 https://drift.simonbinder.eu/dart_api/writes/#updating-with-sql-expressions 正文核心API 写入(更新、插入、删除&#…...
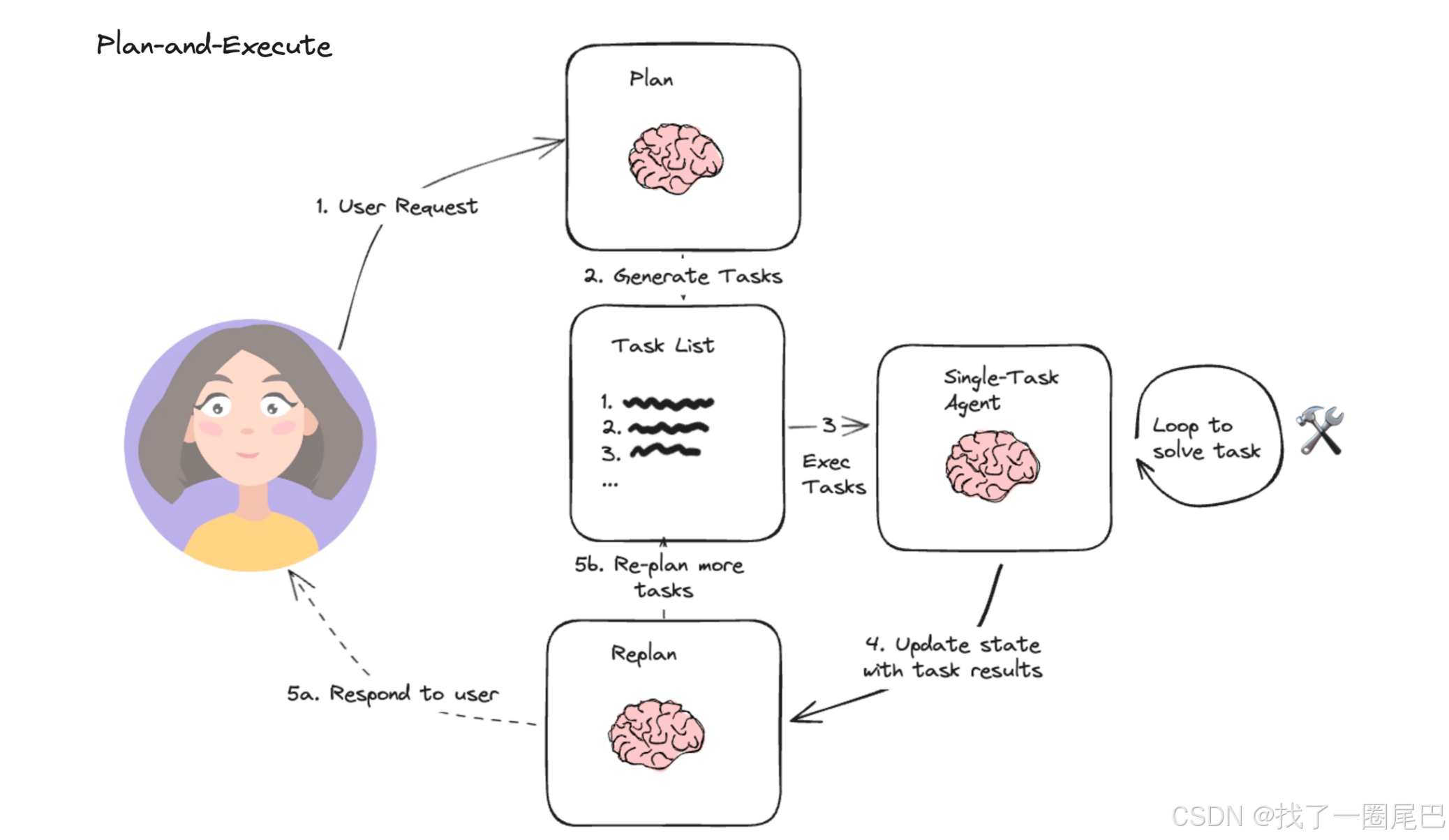
AI Agent-基础认知与架构解析
定义 AI Agent 可以理解为一种具备感知、决策和行动能力的智能实体,能够在复杂的环境中自主运行,并根据环境变化动态调整自身行为,以实现特定目标。与传统的人工智能程序相比,AI Agent 具有更强的自主性、交互性和适应性。它不仅能…...

privateGPT和RAGflow之间的区别
PrivateGPT和RAGFlow都是基于RAG(检索增强生成)技术的开源项目,但它们在设计目标、技术架构和应用场景上有显著差异。以下是两者的详细对比分析: 1. 核心定位与设计目标 PrivateGPT 隐私优先:专注于完全离线的私有化部署,确保用户数据不离开本地环境,适合对隐私要求极高…...

C语言--字符函数
C语言--字符函数 一、字符函数1.1 iscntrl1.2 isspace1.3 isdigit1.4 isxdigit1.5 islower1.6 isupper1.7 isalpha1.8 isalnum1.9 ispunct1.10 isgraph1.11 isprint 在编程的过程中,我们会经常处理字符,为了方便操作,C语言标准库中提供了一系…...

Android对工程中的String中文字符的整理
本文主要介绍使用python快速整理工程中的中文字符,为app国际化提供便利。 1. 查找Android工程中的所有中文字符串(find_chinese.py) import os import re import argparsedef is_comment_line(line, file_ext):"""判断一行是否是注释:param lin…...

菜鸟之路Day30一一MySQL之DMLDQL
菜鸟之路Day30一一MySQL之DML&DQL 作者:blue 时间:2025.5.8 文章目录 菜鸟之路Day30一一MySQL之DML&DQL一.DML0.概述1.插入语句(insert)2.更新语句(update)3.删除语句(delete…...

集团云解决方案:集团企业IT基础架构的降本增效利器
在当今数字化飞速发展的时代,集团企业面临着诸多挑战,尤其是IT基础架构的管理和运营成本居高不下,效率却难以提升。别担心,集团云解决方案的出现为集团企业带来了全新的曙光,真正实现了降本增效! 一、集团…...
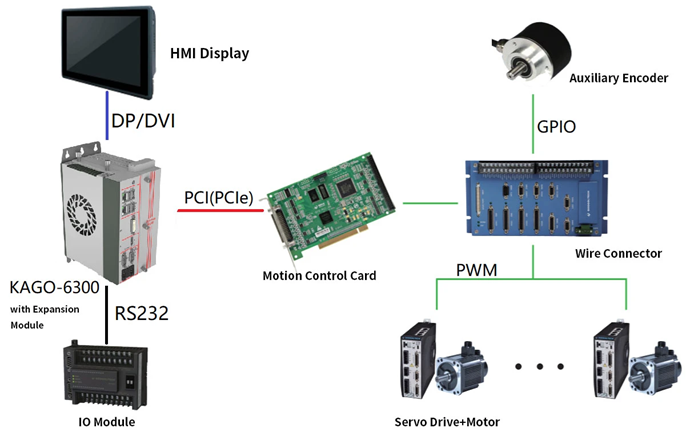
基 LabVIEW 的多轴电机控制系统
在工业自动化蓬勃发展的当下,多轴伺服电机控制系统的重要性与日俱增,广泛应用于众多领域。下面围绕基于 LabVIEW 开发的多轴伺服电机控制系统展开,详细阐述其应用情况。 一、应用领域与场景 在 3D 打印领域,该系统精确操控打印头…...
)
SD06_前后端分离项目部署流程(采用Nginx)
本文档详细描述了如何在Ubuntu 20.04服务器上从零开始部署Tlias前后端分离系统。Tlias系统由Spring Boot后端(tlias-web-management)和Vue前端(vue-tlias-management)组成。 目录 环境准备安装MySQL数据库部署后端项目部署前端项…...

【kubernetes】通过Sealos 命令行工具一键部署k8s集群
一、前言 1、sealos安装k8s集群官网:K8s > Quick-start > Deploy-kubernetes | Sealos Docs 2、本文安装的k8s版本为v1.28.9 3、以下是一些基本的安装要求: 每个集群节点应该有不同的主机名。主机名不要带下划线。所有节点的时间需要同步。需要…...
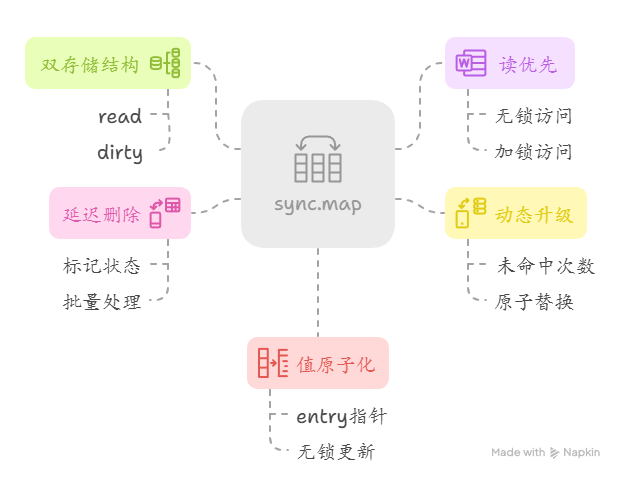
《Go小技巧易错点100例》第三十二篇
本期分享: 1.sync.Map的原理和使用方式 2.实现有序的Map sync.Map的原理和使用方式 sync.Map的底层结构是通过读写分离和无锁读设计实现高并发安全: 1)双存储结构: 包含原子化的 read(只读缓存,无锁快…...

怎么判断是不是公网IP?如何查看自己本地路由器是内网ip还是公网?
在网络世界中,IP 地址如同每台设备的 “门牌号”,起着至关重要的标识作用。而 IP 地址又分为公网 IP 和私网 IP,准确判断一个 IP 属于哪一类,对于网络管理、网络应用开发以及理解网络架构等都有着重要意义。接下来,我们…...

【上位机——MFC】单文档和多文档视图架构
单文档视图架构 特点:只能管理一个文档(只有一个文档类对象) #include <afxwin.h> #include "resource.h"//文档类 class CMyDoc :public CDocument {DECLARE_DYNCREATE(CMyDoc) //支持动态创建机制 }; IMPLEMENT_DYNCREATE(CMyDoc,CDocument) //…...