新型深度神经网络架构:ENet模型
语义分割技术能够为图像中的每个像素分配一个类别标签,这对于理解图像内容和在复杂场景中找到目标对象至关重要。在自动驾驶和增强现实等应用中,实时性是一个硬性要求,因此设计能够快速运行的卷积神经网络非常关键。
尽管深度卷积神经网络(如VGG16等)在分类和识别任务上取得了巨大成功,但它们在像素级图像标注上提供的空间结果较为粗糙。通常需要将CNN与其他算法(例如基于颜色的分割或条件随机场)级联以细化结果。许多移动或电池供电的应用需要以高于每秒10帧(fps)的速率处理图像,这对算法的运行效率提出了更高的要求。然而,现有的基于深度学习的方法往往因为参数众多和推理时间长而难以满足这一需求。
为了解决这些问题,论文提出了ENet,这是一个专为低延迟操作而设计的新型深度神经网络架构。ENet在保持相似或更高准确度的同时,显著减少了计算量、参数数量,并提高了运行速度。ENet的主要目标是在资源受限的移动设备上实现高效的语义分割,同时在高端GPU上也展现出高效的性能,以满足数据中心等场景下对大规模高分辨率图像处理的需求。
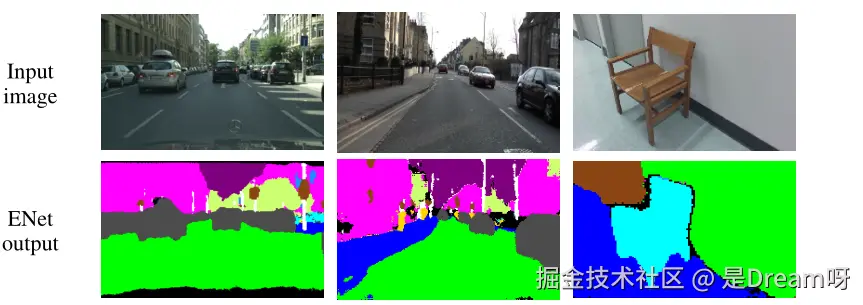
不同数据集上的ENet预测(从左到右为cityscape、CamVid和SUN):
ENet(Efficient Neural Network)
模型架构:
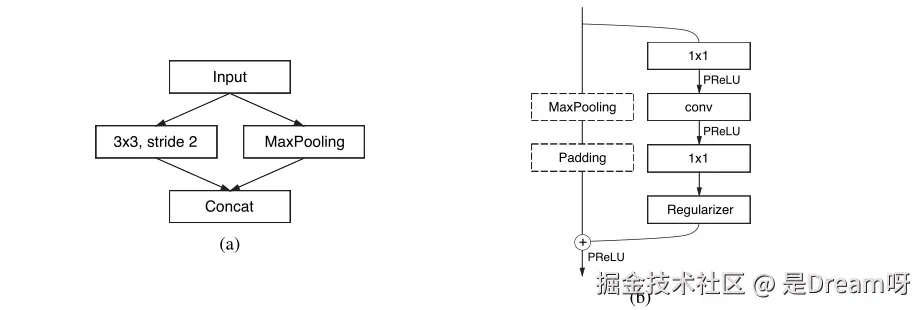
ENet网络框架是一种专为实时语义分割任务设计的深度学习模型,它采用了高效的编码器-解码器结构,包含多个阶段,每个阶段由多个瓶颈模块(bottleneck blocks)组成。
1. 初始阶段: 这个阶段使用一个单独的卷积块,包括一个3x3的卷积层,步长为2,用于快速将输入图像下采样,减少分辨率,同时增加特征图的数量。
2. 编码器:
瓶颈模块(Bottleneck Modules):ENet的编码器由多个瓶颈模块组成,每个模块包含以下子层:
- 1x1投影卷积:用于降维,减少特征图的数量。
- 主卷积层:可以是3x3的常规卷积、扩张卷积或5x5的不对称卷积(由5x1和1x5的卷积组成)。
- 1x1扩展卷积:用于升维,恢复特征图的数量。
- 批量归一化(Batch Normalization) 和 PReLU激活函数:在所有卷积层之后使用,以加速训练并提高模型稳定性。
- 下采样:通过最大池化层或步长为2的卷积层实现,减少特征图的空间尺寸。
3. 重复部分: 编码器中包含重复的部分,其中不包含下采样的瓶颈模块,以进一步提取特征。
4. 解码器: 解码器同样由瓶颈模块组成,但执行的是上采样操作,逐步恢复特征图的空间尺寸。
- 上采样模块:与编码器中的下采样相对应,使用上采样卷积层逐步增加特征图的分辨率。
- 最大池化与最大反池化(Max Unpooling):编码器中使用最大池化减少尺寸,在解码器中使用最大反池化恢复尺寸。
5. 全卷积层:
在解码器的最后,使用一个全卷积层将特征图转换成最终的语义分割图,该层的输出通道数等于类别数。
模型特点:
- 速度快:比现有模型快18倍。
- 计算量低:需要的浮点运算次数(FLOPs)少75倍。
- 参数少:参数数量少79倍。
- 精度高:提供与现有模型相似或更好的精度。
模型代码
initial block
class InitialBlock(nn.Module):
def __init__(self,in_channels,out_channels):super(InitialBlock, self).__init__()self.conv = nn.Conv2d(in_channels, out_channels-in_channels, kernel_size=3, stride=2,padding=1, bias=False)self.pool = nn.MaxPool2d(kernel_size=3,stride=2,padding=1)self.bn = nn.BatchNorm2d(out_channels)self.relu = nn.PReLU()def forward(self, x):return self.relu(self.bn(torch.cat([self.conv(x),self.pool(x)],dim=1)))
bottleneck module
def __init__(self,in_places,places, stride=1, expansion = 4,dilation=1,is_relu=False,asymmetric=False,p=0.01):super(RegularBottleneck, self).__init__()mid_channels = in_places // expansion self.bottleneck = nn.Sequential(Conv1x1BNReLU(in_places, mid_channels, False),AsymmetricConv(mid_channels, 1, is_relu) if asymmetric else Conv3x3BNReLU(mid_channels, mid_channels, 1,dilation, is_relu),Conv1x1BNReLU(mid_channels, places,is_relu),nn.Dropout2d(p=p))self.relu = nn.ReLU(inplace=True) if is_relu else nn.PReLU()def forward(self, x):residual = x out = self.bottleneck(x)out += residual out = self.relu(out)return outclass DownBottleneck(nn.Module):def __init__(self,in_places,places, stride=2, expansion = 4,is_relu=False,p=0.01):super(DownBottleneck, self).__init__()mid_channels = in_places // expansion self.bottleneck = nn.Sequential(Conv2x2BNReLU(in_places, mid_channels, is_relu),Conv3x3BNReLU(mid_channels, mid_channels, 1, 1, is_relu),Conv1x1BNReLU(mid_channels, places,is_relu),nn.Dropout2d(p=p))self.downsample = nn.MaxPool2d(3,stride=stride,padding=1,return_indices=True)self.relu = nn.ReLU(inplace=True) if is_relu else nn.PReLU()def forward(self, x):out = self.bottleneck(x)residual,indices = self.downsample(x)n, ch, h, w = out.size()ch_res = residual.size()[1]padding = torch.zeros(n, ch - ch_res, h, w)residual = torch.cat((residual, padding), 1)out += residual out = self.relu(out)return out, indicesclass UpBottleneck(nn.Module):def __init__(self,in_places,places, stride=2, expansion = 4,is_relu=True,p=0.01):super(UpBottleneck, self).__init__()mid_channels = in_places // expansion self.bottleneck = nn.Sequential(Conv1x1BNReLU(in_places,mid_channels,is_relu),TransposeConv3x3BNReLU(mid_channels,mid_channels,stride,is_relu),Conv1x1BNReLU(mid_channels,places,is_relu),nn.Dropout2d(p=p))self.upsample_conv = Conv1x1BN(in_places, places)self.upsample_unpool = nn.MaxUnpool2d(kernel_size=2)self.relu = nn.ReLU(inplace=True) if is_relu else nn.PReLU()def forward(self, x, indices):out = self.bottleneck(x)residual = self.upsample_conv(x)residual = self.upsample_unpool(residual,indices)out += residual out = self.relu(out)returnarchitecture
def __init__(self, num_classes):super(ENet, self).__init__()self.initialBlock = InitialBlock(3,16)self.stage1_1 = DownBottleneck(16, 64, 2)self.stage1_2 = nn.Sequential(RegularBottleneck(64, 64, 1),RegularBottleneck(64, 64, 1),RegularBottleneck(64, 64, 1),RegularBottleneck(64, 64, 1),)self.stage2_1 = DownBottleneck(64, 128, 2)self.stage2_2 = nn.Sequential(RegularBottleneck(128, 128, 1),RegularBottleneck(128, 128, 1, dilation=2),RegularBottleneck(128, 128, 1, asymmetric=True),RegularBottleneck(128, 128, 1, dilation=4),RegularBottleneck(128, 128, 1),RegularBottleneck(128, 128, 1, dilation=8),RegularBottleneck(128, 128, 1, asymmetric=True),RegularBottleneck(128, 128, 1, dilation=16),)self.stage3 = nn.Sequential(RegularBottleneck(128, 128, 1),RegularBottleneck(128, 128, 1, dilation=2),RegularBottleneck(128, 128, 1, asymmetric=True),RegularBottleneck(128, 128, 1, dilation=4),RegularBottleneck(128, 128, 1),RegularBottleneck(128, 128, 1, dilation=8),RegularBottleneck(128, 128, 1, asymmetric=True),RegularBottleneck(128, 128, 1, dilation=16),)self.stage4_1 = UpBottleneck(128, 64, 2, is_relu=True)self.stage4_2 = nn.Sequential(RegularBottleneck(64, 64, 1, is_relu=True),RegularBottleneck(64, 64, 1, is_relu=True),)self.stage5_1 = UpBottleneck(64, 16, 2, is_relu=True)self.stage5_2 = RegularBottleneck(16, 16, 1, is_relu=True)self.final_conv = nn.ConvTranspose2d(in_channels=16, out_channels=num_classes, kernel_size=3, stride=2, padding=1,output_padding=1, bias=False)def forward(self, x):x = self.initialBlock(x)x,indices1 = self.stage1_1(x)x = self.stage1_2(x)x, indices2 = self.stage2_1(x)x = self.stage2_2(x)x = self.stage3(x)x = self.stage4_1(x, indices2)x = self.stage4_2(x)x = self.stage5_1(x, indices1)x = self.stage5_2(x)out = self.final_conv(x)return实验步骤
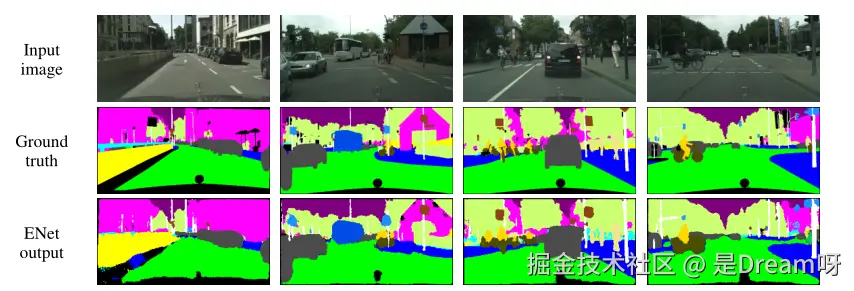
数据集:在CamVid、Cityscapes和SUN数据集上进行测试。
评估指标:使用类平均精度(class average accuracy)和交并比(intersection-over-union, IoU)作为性能评估指标。
训练过程:首先训练编码器,然后添加解码器并训练整个网络进行上采样和像素级分类。
优化算法:使用Adam优化算法,设置学习率为5e-4,L2权重衰减为2e-4,批量大小为10。
实验结果
1.性能对比:ENet在NVIDIA Jetson TX1嵌入式系统模块和NVIDIA Titan X GPU上的性能均优于现有的SegNet模型。ENet在NVIDIA TX1上的推理速度能够达到21.1fps(640x360分辨率),显示出其在实时应用中的潜力:

2.精度:在Cityscapes数据集上,ENet在类IoU、类iIoU和类别IoU上均优于SegNet。在Cityscapes数据集上,ENet在类IoU上达到了58.3%,在iIoU上达到了34.4%,优于SegNet模型。

结论
ENet模型通过其创新的设计,在保持高精度的同时显著提高了语义分割的速度,使其适用于实时应用,尤其是在计算资源受限的移动设备上。尽管主要目标是在移动设备上运行网络,但在高端gpu(如NVIDIA Titan x)上也非常高效。这可能在需要处理大量高分辨率图像的数据中心应用程序中很有用。ENet允许以更快、更有效的方式执行大规模计算,这可能会大大节省成本。
相关文章:
新型深度神经网络架构:ENet模型
语义分割技术能够为图像中的每个像素分配一个类别标签,这对于理解图像内容和在复杂场景中找到目标对象至关重要。在自动驾驶和增强现实等应用中,实时性是一个硬性要求,因此设计能够快速运行的卷积神经网络非常关键。 尽管深度卷积神经网络&am…...
【免杀】C2免杀技术(三)shellcode加密
前言 shellcode加密是shellcode混淆的一种手段。shellcode混淆手段有多种:加密(编码)、偏移量混淆、UUID混淆、IPv4混淆、MAC混淆等。 随着杀毒软件的不断进化,其检测方式早已超越传统的静态特征分析。现代杀软往往会在受控的虚…...

3、ubantu系统docker常用命令
1、自助查看docker命令 1.1、查看所有命令 docker 客户端非常简单,可以直接输入 docker 命令来查看到 Docker 客户端的所有命令选项。 angqiangwangqiang:~$ dockerUsage: docker [OPTIONS] COMMANDA self-sufficient runtime for containersCommon Commands:ru…...

【Linux】shell内置命令fg,bg和jobs
Shell 内置命令 fg(foreground 的缩写)。它用于将后台挂起的任务恢复到前台运行。 例如: 假设你运行了一个耗时的 SVN 操作(如 svn update 或 svn checkout)。按下 CtrlZ 将该进程挂起到后台。输入 fg…...

Java GUI开发全攻略:Swing、JavaFX与AWT
Swing 界面开发 Swing 是 Java 中用于创建图形用户界面(GUI)的库。它提供了丰富的组件,如按钮、文本框、标签等。 import javax.swing.*; import java.awt.event.ActionEvent; import java.awt.event.ActionListener;public class SwingExa…...
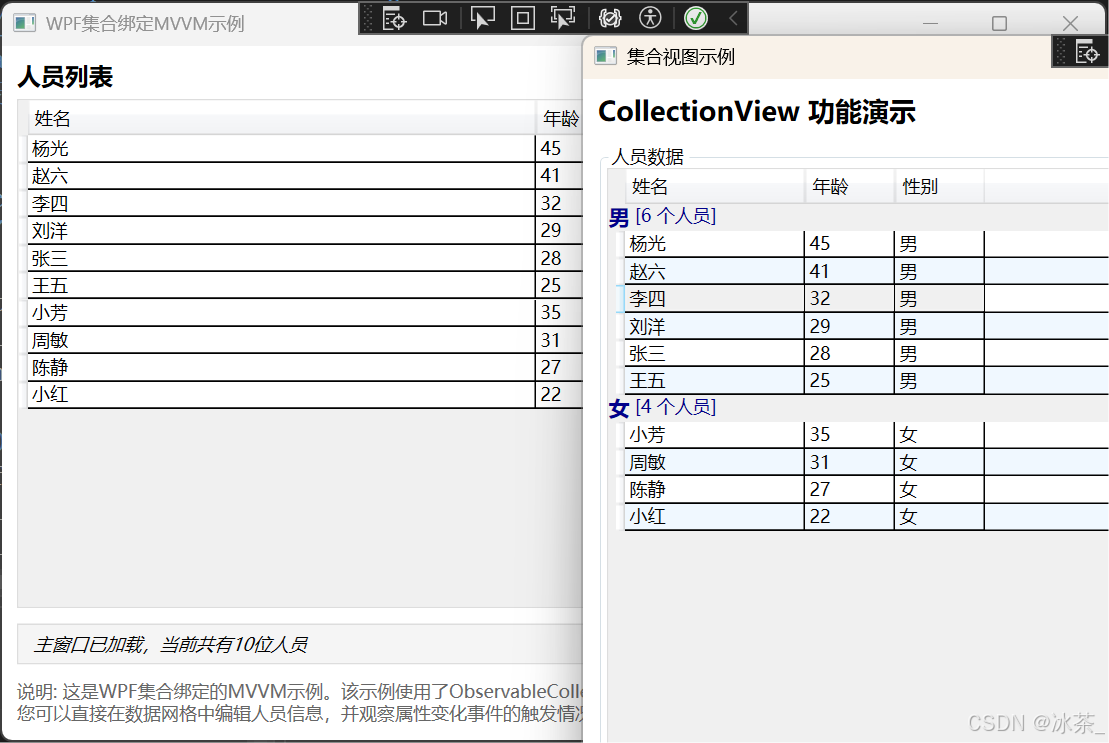
WPF之集合绑定深入
文章目录 引言ObservableCollection<T>基础什么是ObservableCollectionObservableCollection的工作原理基本用法示例ObservableCollection与MVVM模式ObservableCollection的局限性 INotifyCollectionChanged接口深入接口定义与作用NotifyCollectionChangedEventArgs详解自…...

LeetCode 每日一题 3341. 到达最后一个房间的最少时间 I + II
3341. 到达最后一个房间的最少时间 I II 有一个地窖,地窖中有 n x m 个房间,它们呈网格状排布。 给你一个大小为 n x m 的二维数组 moveTime ,其中 moveTime[i][j] 表示在这个时刻 以后 你才可以 开始 往这个房间 移动 。你在时刻 t 0 时从…...
(C语言)超市管理系统(测试2版)(指针)(数据结构)(清屏操作)
目录 前言: 源代码: product.h product.c fileio.h fileio.c main.c 代码解析: 一、程序结构概述 二、product.c 函数详解 1. 初始化商品列表 Init_products 2. 添加商品 add_product 3. 显示商品 display_products 4. 修改商品 mo…...

什么是虚拟同步发电机
虚拟同步发电机(Virtual Synchronous Generator, VSG) 是一种基于电力电子技术的先进控制策略,通过模拟传统同步发电机的机电特性和动态行为,使逆变器或储能系统能够像传统发电机一样为电网提供惯性支撑、频率调节和电压稳定性支持…...

Python字符串全面指南:从基础到高级
文章目录 Python字符串全面指南:从基础到高级1. 字符串基础概念2. 字符串的基本操作2.1 字符串拼接2.2 字符串索引和切片 3. 字符串常用方法3.1 大小写转换3.2 字符串查找和替换3.3 字符串分割和连接3.4 字符串格式化3.5 字符串验证 4. 字符串的不可变性5. 字符串编…...

基于大模型的TIA诊疗全流程智能决策系统技术方案
目录 一、多模态数据融合与预处理系统1.1 数据接入模块1.2 数据预处理伪代码二、TIA智能预测模型系统2.1 模型训练流程2.2 混合模型架构伪代码三、术中智能监测系统3.1 实时监测流程3.2 实时预测伪代码四、智能诊疗决策系统4.1 手术方案推荐流程4.2 麻醉方案生成伪代码五、预后…...
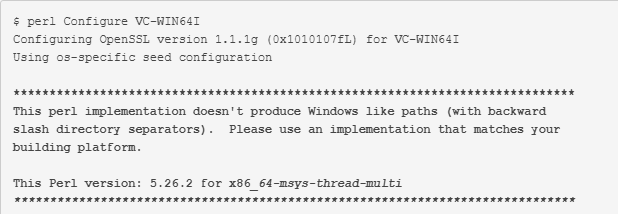
编译openssl源码
openssl版本 1.1.1c windows 安装环境 perl 先安装perl,生成makefile需要 https://strawberryperl.com/releases.html nasm nasm 也是生成makefile需要 https://www.nasm.us/ 安装完perl输入一下nasm,看看能不能找到,找不到的话需要配…...

CMake入门与实践:现代C++项目的构建利器
文章目录 CMake入门与实践:现代C项目的构建利器引言什么是CMake?快速入门:从Hello World开始1. 安装CMake2. 最小项目示例3. 构建项目 核心概念详解1. 项目结构组织2. 常用指令3. 变量与条件控制 进阶技巧1. 多目录项目管理2. 集成第三方库3.…...
OpenCV实现数字水印的相关函数和示例代码
OpenCV计算机视觉开发实践:基于Qt C - 商品搜索 - 京东 实现数字水印的相关函数 用OpenCV来实现数字水印功能,需要使用一些位操作函数,我们需要先了解一下这些函数。 1. bitwise_and函数 bitwise_and函数是OpenCV中的位运算函数之一&…...
计算模块)
BMS工具箱用来执行贝叶斯模型平均(BMA)计算模块
贝叶斯模型平均(Bayesian Model Averaging,BMA)是一种用于处理模型不确定性的统计方法,通过结合多个模型的预测结果来提高预测的准确性和鲁棒性。在 MATLAB 中,可以使用专门的工具箱(如 BMS 工具箱…...

坐席业绩数据分析
豆包提示词: 使用papaparse.js,chart.js,tailwindcss和font-awesome,生成一个可以交互的简洁且可以运行的HTML代码,不要输出无关内容。 具体要求如下: 1、按坐席姓名输出业绩折线图。 2、系统导航区域&…...

国产大模型 “五强争霸”,决战 AGI
中国 AI 大模型市场正经历一场史无前例的洗牌!曾经 “百模混战” 的局面已落幕,字节、阿里、阶跃星辰、智谱和 DeepSeek 五大巨头强势崛起,形成 “基模五强” 新格局。这场竞争不仅是技术实力的较量,更是资源、人才与生态的全面博…...
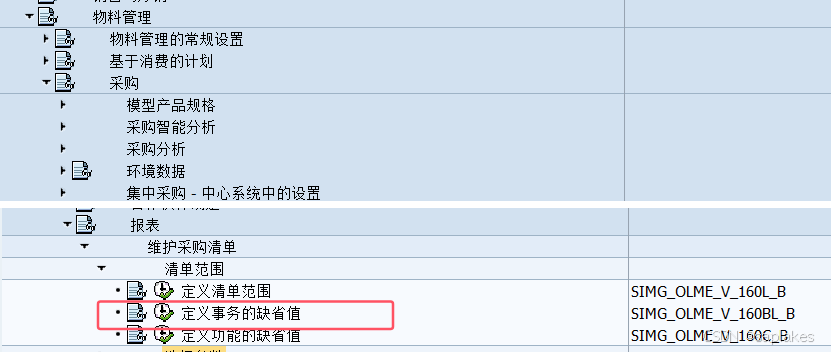
怎样将MM模块常用报表设置为ALV默认格式(MB52、MB5B、ME2M、ME1M等)
【SAP系统研究】 对SAP系统中的报表,最方便的格式就是ALV了,可排序、可导出,非常友好。 但有些常见报表却不是默认ALV界面的,譬如MB52: 是不是有点别扭?但其实是可以后台配置进行调整的。 现将一些常用报表修改为默认ALV的方法进行总结,便于大家使用。 一、MB52、MB5…...

Spark 集群配置、启动与监控指南
Spark 集群的配置和启动需要几个关键步骤。以下是完整的操作流程,包含配置修改、集群启动、任务提交和常见错误排查方法。 1. 修改 Spark 配置文件 首先需要编辑 Spark 配置文件,设置集群参数: bash # 进入 Spark 配置目录 cd $SPARK_HOM…...

前端面试每日三题 - Day 34
这是我为准备前端/全栈开发工程师面试整理的第34天每日三题练习: ✅ 题目1:WebGPU图形编程实战指南 核心概念 // WebGPU初始化流程 const adapter await navigator.gpu.requestAdapter(); const device await adapter.requestDevice();// 渲染管线配…...

比亚迪固态电池突破:王传福的技术哲学与产业重构|创客匠人热点评述
合肥某车间凌晨两点依然灯火通明,工程师正在调试的银白色设备,即将颠覆整个电动车行业 —— 比亚迪全固态电池产线的曝光,标志着中国新能源汽车产业正式迈入 “技术定义市场” 的新纪元。 一、技术突破的底层逻辑 比亚迪全固态电池的核心竞…...
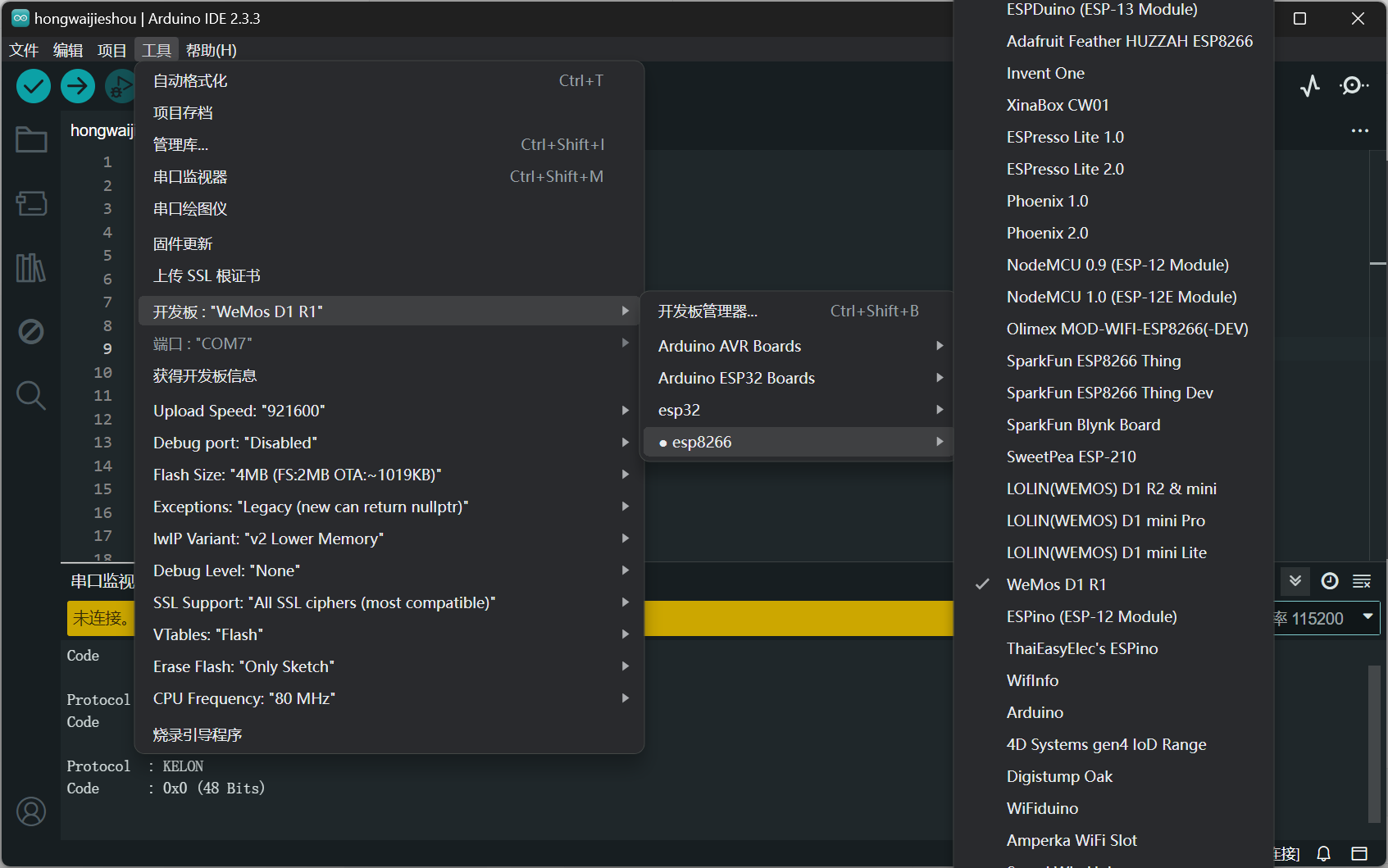
Arduino使用红外收发模块
目录 Arduino UNO连接红外发射模块: Arduino D1连接红外接收模块: 有一个Arduini UNO板子和一个Arduino D1板子,我想通过红外发射模块和红外接收模块让他们进行通信。 先看结果: Arduino UNO连接红外发射模块: 发射模…...

【强化学习】强化学习算法 - 马尔可夫决策过程
马尔可夫决策过程 (Markov Decision Process, MDP) 1. MDP 原理介绍 马尔可夫决策过程 (MDP) 是强化学习 (Reinforcement Learning, RL) 中用于对序贯决策 (Sequential Decision Making) 问题进行数学建模的标准框架。它描述了一个智能体 (Agent) 与环境 (Environment) 交互的…...
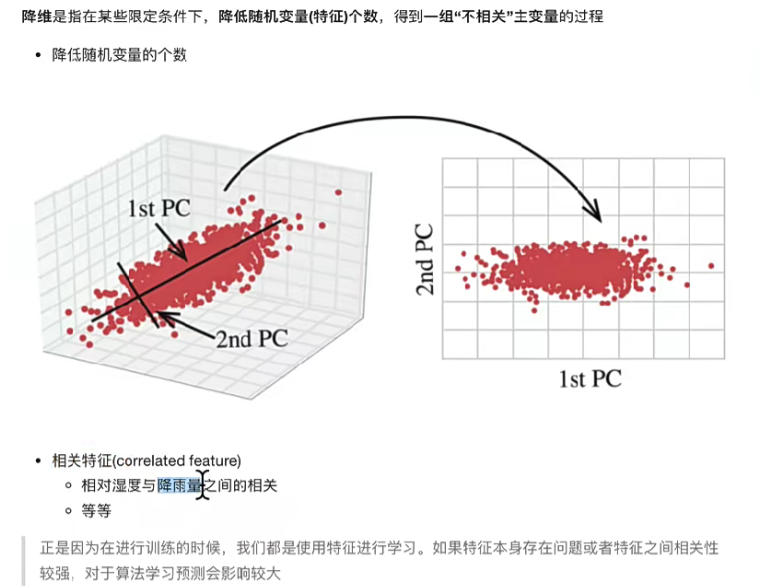
机器学习 Day16 聚类算法 ,数据降维
聚类算法 1.简介 1.1 聚类概念 无监督学习:聚类是一种无监督学习算法,不需要预先标记的训练数据 相似性分组:根据样本之间的相似性自动将样本归到不同类别 相似度度量:常用欧式距离作为相似度计算方法 1.2 聚类vs分类 聚类&…...

开源Heygem本地跑AI数字人视频教程
图文教程: 点击跳转 视频教程 资料包下载 点击下载:...

软件测试——面试八股文(入门篇)
今天给大家分享软件测试面试题入门篇,看看大家能答对几题 一、 请你说一说测试用例的边界 参考回答: 边界值分析法就是对输入或输出的边界值进行测试的一种黑盒测试方法。通常边界值分析法是作为对等价类划分法的补充,这种情况下ÿ…...
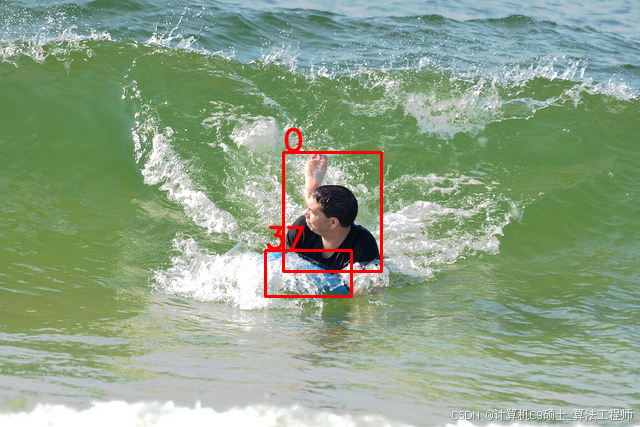
Yolov8的详解与实战-深度学习目标检测
Yolov8的详解与实战- 文章目录 摘要 模型详解 C2F模块 Loss head部分 模型实战 训练COCO数据集 下载数据集 COCO转yolo格式数据集(适用V4,V5,V6,V7,V8) 配置yolov8环境 训练 测试 训练自定义数据集 Labelme…...
Python(1) 做一个随机数的游戏
有关变量的,其实就是 可以直接打印对应变量。 并且最后倒数第二行就是可以让两个数进行交换。 Py快捷键“ALTP 就是显示上一句的代码。 —————————————————————————————— 字符串 用 双引号或者单引号 。 然后 保证成双出现即可 要是…...

【Bootstrap V4系列】学习入门教程之 组件-导航条(Navbar)
Bootstrap V4系列 学习入门教程之 组件-导航条(Navbar) 导航条(Navbar)一、How it works二、Supported content 支持的内容2.1 Brand 品牌2.2 Nav 导航2.3 Forms 表格 三、Color schemes 配色方案四、Containers 容器五、Placemen…...

[Java实战]Spring Security 添加验证码(二十三)
[Java实战]Spring Security 添加验证码(二十三) 在现代的 Web 应用中,验证码是防止恶意攻击(如暴力破解、自动注册等)的重要手段之一。Spring Security 是一个功能强大的安全框架,提供了用户认证、授权等功…...