05.three官方示例+编辑器+AI快速学习three.js webgl - animation - skinning - ik
本实例主要讲解内容
这个Three.js示例展示了**反向运动学(Inverse Kinematics, IK)**在3D角色动画中的应用。通过加载一个角色模型,演示了如何使用IK技术实现自然的肢体运动控制,如手部抓取物体的动作。
核心技术包括:
- CCD反向运动学求解器
- 实时IK计算与应用
- 角色头部跟踪
- 镜面反射效果
- 交互式控制器

完整代码注释
<!DOCTYPE html>
<html lang="en"><head><title>three.js webgl - animation - skinning - ik</title><meta charset="utf-8"><meta name="viewport" content="width=device-width, user-scalable=no, minimum-scale=1.0, maximum-scale=1.0"><meta name="author" content="Antoine BERNIER (abernier)" /><link type="text/css" rel="stylesheet" href="main.css"><style>body {color:white;}#info a {color:#4d6675;}</style></head><body><div id="info"><a href="https://threejs.org" target="_blank" rel="noopener">three.js</a> - webgl - inverse kinematics<br />Character model by <a href="https://assetstore.unity.com/packages/3d/characters/humanoids/humans/kira-lowpoly-character-100303" target="_blank" rel="noopener">Aki</a>, furnitures from <a href="https://poly.pizza" target="_blank" rel="noopener">poly.pizza</a>, scene by <a href="https://abernier.name/three.js/examples/webgl_esher.html" target="_blank" rel="noopener">abernier</a>. CC0.</div><script type="importmap">{"imports": {"three": "../build/three.module.js","three/addons/": "./jsm/"}}</script><script type="module">import * as THREE from 'three';import { OrbitControls } from 'three/addons/controls/OrbitControls.js';import { TransformControls } from 'three/addons/controls/TransformControls.js';import { GLTFLoader } from 'three/addons/loaders/GLTFLoader.js';import { DRACOLoader } from 'three/addons/loaders/DRACOLoader.js';import { CCDIKSolver, CCDIKHelper } from 'three/addons/animation/CCDIKSolver.js';import Stats from 'three/addons/libs/stats.module.js';import { GUI } from 'three/addons/libs/lil-gui.module.min.js';let scene, camera, renderer, orbitControls, transformControls;let mirrorSphereCamera;const OOI = {}; // 感兴趣的对象集合let IKSolver; // IK求解器let stats, gui, conf; // 统计面板、控制面板和配置对象const v0 = new THREE.Vector3(); // 临时向量,用于计算init();async function init() {conf = {followSphere: false, // 相机是否跟随球体turnHead: true, // 头部是否转向球体ik_solver: true, // 是否自动更新IKupdate: updateIK // 手动更新IK的函数};scene = new THREE.Scene();scene.fog = new THREE.FogExp2( 0xffffff, .17 ); // 设置指数雾scene.background = new THREE.Color( 0xffffff ); // 设置背景色为白色camera = new THREE.PerspectiveCamera( 55, window.innerWidth / window.innerHeight, 0.001, 5000 );camera.position.set( 0.9728517749133652, 1.1044765132727201, 0.7316689528482836 );camera.lookAt( scene.position );// 添加环境光,照亮整个场景const ambientLight = new THREE.AmbientLight( 0xffffff, 8 ); // 柔和的白色光scene.add( ambientLight );// 初始化DRACO加载器,用于加载压缩的GLTF模型const dracoLoader = new DRACOLoader();dracoLoader.setDecoderPath( 'jsm/libs/draco/' );const gltfLoader = new GLTFLoader();gltfLoader.setDRACOLoader( dracoLoader );// 加载GLTF模型const gltf = await gltfLoader.loadAsync( 'models/gltf/kira.glb' );gltf.scene.traverse( n => {// 收集感兴趣的对象,用于后续控制if ( n.name === 'head' ) OOI.head = n;if ( n.name === 'lowerarm_l' ) OOI.lowerarm_l = n;if ( n.name === 'Upperarm_l' ) OOI.Upperarm_l = n;if ( n.name === 'hand_l' ) OOI.hand_l = n;if ( n.name === 'target_hand_l' ) OOI.target_hand_l = n;if ( n.name === 'boule' ) OOI.sphere = n; // 球体对象if ( n.name === 'Kira_Shirt_left' ) OOI.kira = n; // 角色主体} );scene.add( gltf.scene );// 记录球体的初始位置,用于轨道控制器const targetPosition = OOI.sphere.position.clone();// 将球体附加到角色的左手上,使其跟随手部移动OOI.hand_l.attach( OOI.sphere );// 创建镜面球体的立方相机const cubeRenderTarget = new THREE.WebGLCubeRenderTarget( 1024 );mirrorSphereCamera = new THREE.CubeCamera( 0.05, 50, cubeRenderTarget );scene.add( mirrorSphereCamera );// 使用立方相机的渲染结果作为球体的环境贴图,实现镜面效果const mirrorSphereMaterial = new THREE.MeshBasicMaterial( { envMap: cubeRenderTarget.texture } );OOI.sphere.material = mirrorSphereMaterial;// 将角色的骨骼根节点添加到角色对象中OOI.kira.add( OOI.kira.skeleton.bones[ 0 ] );// 设置IK求解器配置const iks = [{target: 22, // "target_hand_l" 目标对象IDeffector: 6, // "hand_l" 效应器ID(手)links: [{index: 5, // "lowerarm_l" 下臂rotationMin: new THREE.Vector3( 1.2, - 1.8, - .4 ), // 最小旋转角度rotationMax: new THREE.Vector3( 1.7, - 1.1, .3 ) // 最大旋转角度},{index: 4, // "Upperarm_l" 上臂rotationMin: new THREE.Vector3( 0.1, - 0.7, - 1.8 ),rotationMax: new THREE.Vector3( 1.1, 0, - 1.4 )},],}];// 创建CCDIK求解器,用于计算反向运动学IKSolver = new CCDIKSolver( OOI.kira, iks );// 创建IK辅助工具,可视化IK链const ccdikhelper = new CCDIKHelper( OOI.kira, iks, 0.01 );scene.add( ccdikhelper );// 创建控制面板gui = new GUI();gui.add( conf, 'followSphere' ).name( 'follow sphere' ); // 相机是否跟随球体gui.add( conf, 'turnHead' ).name( 'turn head' ); // 头部是否转向球体gui.add( conf, 'ik_solver' ).name( 'IK auto update' ); // 是否自动更新IKgui.add( conf, 'update' ).name( 'IK manual update()' ); // 手动更新IK按钮gui.open();// 初始化渲染器renderer = new THREE.WebGLRenderer( { antialias: true } );renderer.setPixelRatio( window.devicePixelRatio );renderer.setSize( window.innerWidth, window.innerHeight );renderer.setAnimationLoop( animate ); // 设置动画循环document.body.appendChild( renderer.domElement );// 初始化轨道控制器,允许用户旋转和缩放相机orbitControls = new OrbitControls( camera, renderer.domElement );orbitControls.minDistance = 0.2;orbitControls.maxDistance = 1.5;orbitControls.enableDamping = true; // 启用阻尼效果,使相机移动更平滑orbitControls.target.copy( targetPosition ); // 设置控制器目标位置// 初始化变换控制器,允许用户交互式移动、旋转和缩放对象transformControls = new TransformControls( camera, renderer.domElement );transformControls.size = 0.75;transformControls.showX = false; // 不显示X轴transformControls.space = 'world'; // 在世界坐标系下操作transformControls.attach( OOI.target_hand_l ); // 附加到左手目标对象scene.add( transformControls.getHelper() ); // 添加控制器辅助工具// 当使用变换控制器时,禁用轨道控制器transformControls.addEventListener( 'mouseDown', () => orbitControls.enabled = false );transformControls.addEventListener( 'mouseUp', () => orbitControls.enabled = true );// 添加性能统计面板stats = new Stats();document.body.appendChild( stats.dom );// 添加窗口大小变化事件监听window.addEventListener( 'resize', onWindowResize, false );}function animate( ) {if ( OOI.sphere && mirrorSphereCamera ) {// 更新镜面球体的反射效果OOI.sphere.visible = false; // 临时隐藏球体,避免反射自身OOI.sphere.getWorldPosition( mirrorSphereCamera.position ); // 将相机放置在球体位置mirrorSphereCamera.update( renderer, scene ); // 更新立方相机渲染OOI.sphere.visible = true; // 重新显示球体}if ( OOI.sphere && conf.followSphere ) {// 相机跟随球体OOI.sphere.getWorldPosition( v0 );orbitControls.target.lerp( v0, 0.1 ); // 平滑过渡到球体位置}if ( OOI.head && OOI.sphere && conf.turnHead ) {// 头部转向球体OOI.sphere.getWorldPosition( v0 );OOI.head.lookAt( v0 );// 调整头部旋转,使其看起来更自然OOI.head.rotation.set( OOI.head.rotation.x, OOI.head.rotation.y + Math.PI, OOI.head.rotation.z );}if ( conf.ik_solver ) {// 更新IK求解器updateIK();}orbitControls.update(); // 更新轨道控制器renderer.render( scene, camera ); // 渲染场景stats.update(); // 更新性能统计}function updateIK() {// 更新IK求解器if ( IKSolver ) IKSolver.update();// 重新计算所有蒙皮网格的边界球体scene.traverse( function ( object ) {if ( object.isSkinnedMesh ) object.computeBoundingSphere();} );}function onWindowResize() {// 窗口大小变化时调整相机和渲染器camera.aspect = window.innerWidth / window.innerHeight;camera.updateProjectionMatrix();renderer.setSize( window.innerWidth, window.innerHeight );}</script></body>
</html>
反向运动学原理与应用
反向运动学(IK)是计算机动画中的重要技术,与正向运动学(FK)相对。
正向运动学与反向运动学的区别
-
正向运动学(FK):从父关节到子关节的运动传递方式。例如,当你移动肩膀时,上臂、下臂和手都会随之移动。这是传统骨骼动画的工作方式。
-
反向运动学(IK):根据末端效应器(如手或脚)的目标位置,计算出所有关节的旋转角度。例如,当你指定手要抓住某个物体时,IK系统会自动计算出肩膀、上臂和下臂的正确角度。
CCD IK求解器
本示例使用了Three.js提供的**CCDIK(Cyclic Coordinate Descent)**求解器:
-
工作原理:从末端效应器开始,逐个调整关节角度,使效应器逐渐接近目标位置,直到达到收敛条件或最大迭代次数。
-
参数配置:
target:目标位置对象IDeffector:末端效应器IDlinks:关节链,每个关节有最小和最大旋转限制- 可以配置多个独立的IK链
IK在游戏和动画中的应用
IK技术在游戏和动画中有广泛应用:
- 角色交互:角色抓取物体、攀爬、游泳等动作
- 脚部放置:角色在不平整地面行走时自动调整脚部位置和姿态
- 面部表情:控制面部骨骼实现表情动画
- 物理模拟:与物理引擎结合实现更真实的动作
IK技术可以大大减少动画师的工作量,尤其是对于复杂的肢体运动。同时,它也能使角色行为更加自然,增强游戏和虚拟环境的沉浸感。
相关文章:
05.three官方示例+编辑器+AI快速学习three.js webgl - animation - skinning - ik
本实例主要讲解内容 这个Three.js示例展示了**反向运动学(Inverse Kinematics, IK)**在3D角色动画中的应用。通过加载一个角色模型,演示了如何使用IK技术实现自然的肢体运动控制,如手部抓取物体的动作。 核心技术包括: CCD反向运动学求解器…...

计算机视觉与深度学习 | 激光雷达 vs. RTK+摄像头:谁是智能割草机器人的最优选择?
激光雷达 vs. RTK+摄像头 一、技术原理与核心优势对比二、实际应用中的性能差异三、行业趋势与创新方向四、场景化选择建议五、未来展望激光雷达与RTK+摄像头是智能割草机器人领域两种主流技术路线,各有其适用场景与优劣势。结合行业最新动态与技术演进,以下从多个维度对比分…...
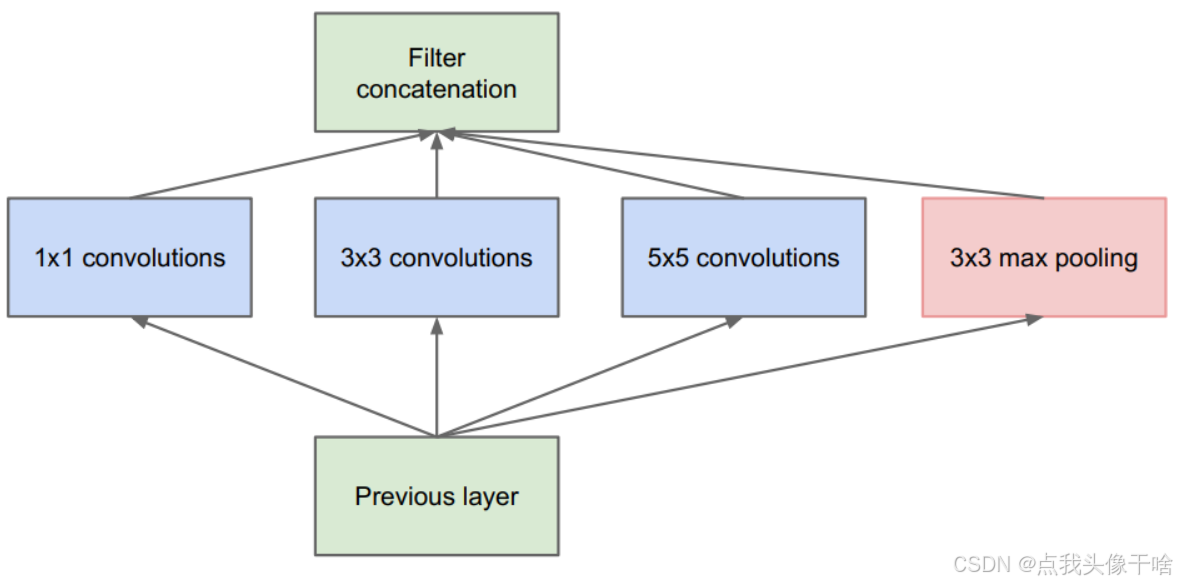
第29节:现代CNN架构-Inception系列模型
引言 Inception系列模型是卷积神经网络(CNN)发展历程中的重要里程碑,由Google研究人员提出并不断演进。这一系列模型通过创新的架构设计,在保持计算效率的同时显著提升了图像识别任务的性能。从最初的Inception v1到最新的Inception-ResNet,每一代Inception模型都引入了突破…...
【深度学习】将本地工程上传到Colab运行的方法
1、将本地工程(压缩包)上传到一个新的colab窗口:如下图中的 2.zip,如果工程中有数据集,可以删除掉。 2、解压压缩包。 !unzip /content/2.zip -d /content/2 如果解压出了不必要的文件夹可以递归删除: #…...
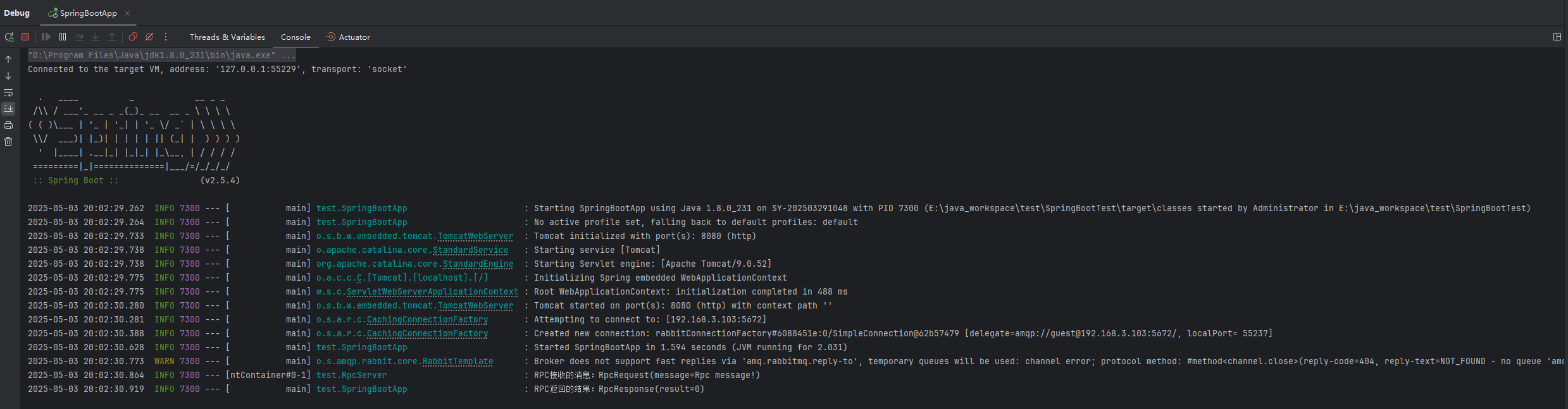
RabbitMQ 中的六大工作模式介绍与使用
文章目录 简单队列(Simple Queue)模式配置类定义消费者定义发送消息测试消费 工作队列(Work Queues)模式配置类定义消费者定义发送消息测试消费负载均衡调优 发布/订阅(Publish/Subscribe)模式配置类定义消…...
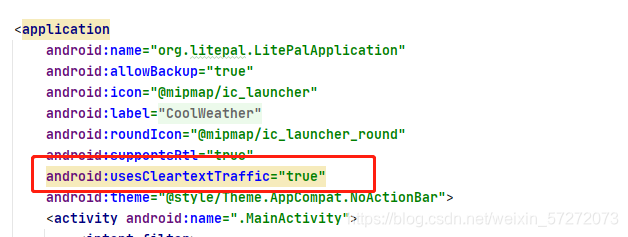
Android HttpAPI通信问题(已解决)
使用ClearTextTraffic是Android中一项重要的网络设置,它控制了应用程序是否允许在不使用HTTPS加密的情况下访问网络。在默认情况下,usescleartexttraffic的值为true,这意味着应用程序可以通过普通的HTTP协议进行网络通信。然而,这样的设置可能会引发一些安全问题,本文将对…...

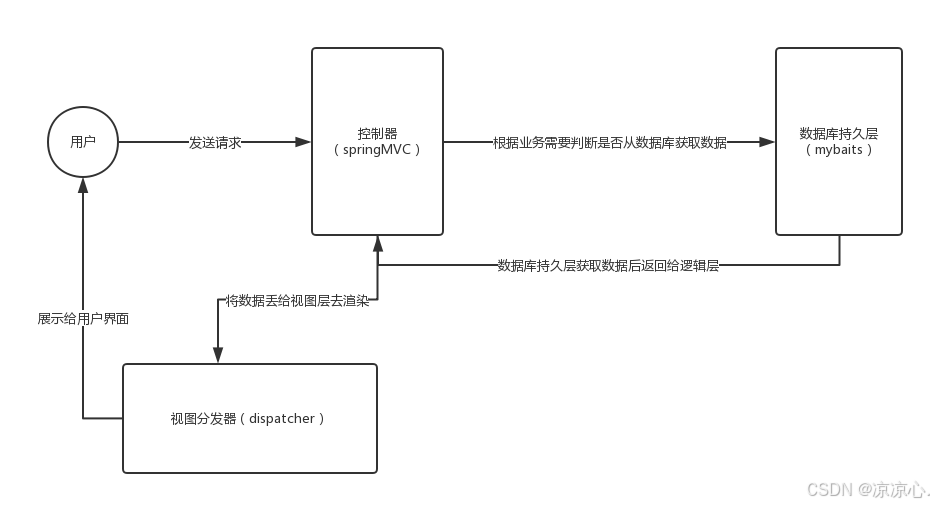
【SSM-SpringMVC(二)】Spring接入Web环境!本篇开始研究SpringMVC的使用!SpringMVC数据响应和获取请求数据
SpringMVC的数据响应方式 页面跳转 直接返回字符串通过ModelAndView对象返回 回写数据 直接返回字符串返回对象或集合 页面跳转: 返回字符串方式 直接返回字符串:此种方式会将返回的字符串与视图解析器的前后缀拼接后跳转 RequestMapping("/con&…...
docker安装mysql8, 字符集,SQL大小写规范,sql_mode
一、Docker安装MySQL 使用Docker安装MySQL,命令如下 docker run -d \-p 3306:3306 \-v mysql_conf:/etc/mysql/conf.d \-v mysql_data:/var/lib/mysql \--name mysql \--restartalways \--privileged \-e MYSQL_ROOT_PASSWORD1234 \mysql:8.0.30参数解释 🐳 dock…...

FastMCP v2:构建MCP服务器和客户端的Python利器
FastMCP v2:构建MCP服务器和客户端的Python利器 引言 在人工智能与大语言模型(LLMs)的应用场景中,如何高效地构建服务器和客户端以实现数据交互与功能调用是关键问题。Model Context Protocol (MCP) 为此提供了一种标准…...

一个WordPress连续登录失败的问题排查
文章目录 1. 问题背景2. 解决方案搜索3. 问题定位4. 排查过程5. 清理空间6. 处理结果7. 后续优化 1. 问题背景 登录请求URL: Request URL: https://www.xxxxxx.com/wp-login.php 返回的响应头信息是: location: https://www.xxxxxx.com/wp-admin/ 证明登录成功。 接下来浏览器…...
【SSM-SSM整合】将Spring、SpringMVC、Mybatis三者进行整合;本文阐述了几个核心原理知识点,附带对应的源码以及描述解析
SSM整合的基础jar包 需要创建的层级: controller层 该层下需要创建对应的控制器Servlet POJO文件夹 该层下需要创建与数据库对应的POJO类 mapper层 该层下需要创建Mapper的接口实现 service层 该层下需要创建业务层的接口及其接口实现 需要创建的配置文件&#x…...

Go语言超时控制方案全解析:基于goroutine的优雅实现
一、引言 在构建高可靠的后端服务时,超时控制就像是守护系统稳定性的"安全阀",它确保当某些操作无法在预期时间内完成时,系统能够及时止损并释放资源。想象一下,如果没有超时控制,一个简单的数据库查询卡住…...

spark运行架构及核心组件介绍
目录 1. Spark 的运行架构1.1 Driver1.2 Executor1.3 Cluster Manager1.4 工作流程 2. Spark 的核心组件2.1 Spark Core2.2 Spark SQL2.3 Spark Streaming2.4 MLlib2.5 GraphX 3. Spark 架构图4. Spark 的优势4.1 高性能4.2 易用性4.3 扩展性4.4 容错性 5. 总结 1. Spark 的运行…...

idea中编写spark程序
### 在 IntelliJ IDEA 中配置和编写 Spark 程序 要在 IntelliJ IDEA 中高效地开发 Spark 程序,需要完成一系列必要的环境配置以及项目搭建工作。以下是详细的说明。 --- #### 1. 安装与配置 IntelliJ IDEA 为了确保 IDE 可以支持 Scala 开发,首先需要…...
:复习)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(21):复习
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(21):复习 1、前言(1)情况说明(2)工程师的信仰 2、知识点(1)じょうけん 条件形1、復習 (&#x…...

MYSQL数据库集群高可用和数据监控平台
项目环境 项目拓扑结构 软硬件环境清单 软硬件环境清单 软硬件环境清单 主机名IP硬件软件 master1 192.168.12.130 VIP:192.168.12.200 cpu:1颗2核 内 存:2GB HDD:20GB 网 络:NAT VmWare17 OpenEuler22.03 SP4 MySql8.0.3…...

Spark SQL 读取 CSV 文件,并将数据写入 MySQL 数据库
在 Spark 中,可以使用 Spark SQL 读取 CSV 文件,并将数据写入 MySQL 数据库。以下是一个完整的示例,展示如何实现这一过程。 环境准备 安装 MySQL:确保 MySQL 数据库已安装并运行。创建 MySQL 数据库和表:CREATE DAT…...
)
C++矩阵操作:正交矩阵(旋转矩阵)
文章目录 一、简介二、实现代码三、实现效果一、简介 我们知道判断一个矩阵的正交性可以看它是否符合以下条件: R T R = I R^TR=I R...

基于单片机的车灯智能控制系统设计与实现
标题:基于单片机的车灯智能控制系统设计与实现 内容:1.摘要 随着汽车行业的快速发展,车灯的智能化控制成为提升行车安全和驾驶体验的关键因素。本文旨在设计并实现一种基于单片机的车灯智能控制系统。采用单片机作为控制核心,结合光照传感器、雨滴传感器…...

机器学习第十一讲:标准化 → 把厘米和公斤单位统一成标准值
机器学习第十一讲:标准化 → 把厘米和公斤单位统一成标准值 资料取自《零基础学机器学习》。 查看总目录:学习大纲 关于DeepSeek本地部署指南可以看下我之前写的文章:DeepSeek R1本地与线上满血版部署:超详细手把手指南 一、买菜…...
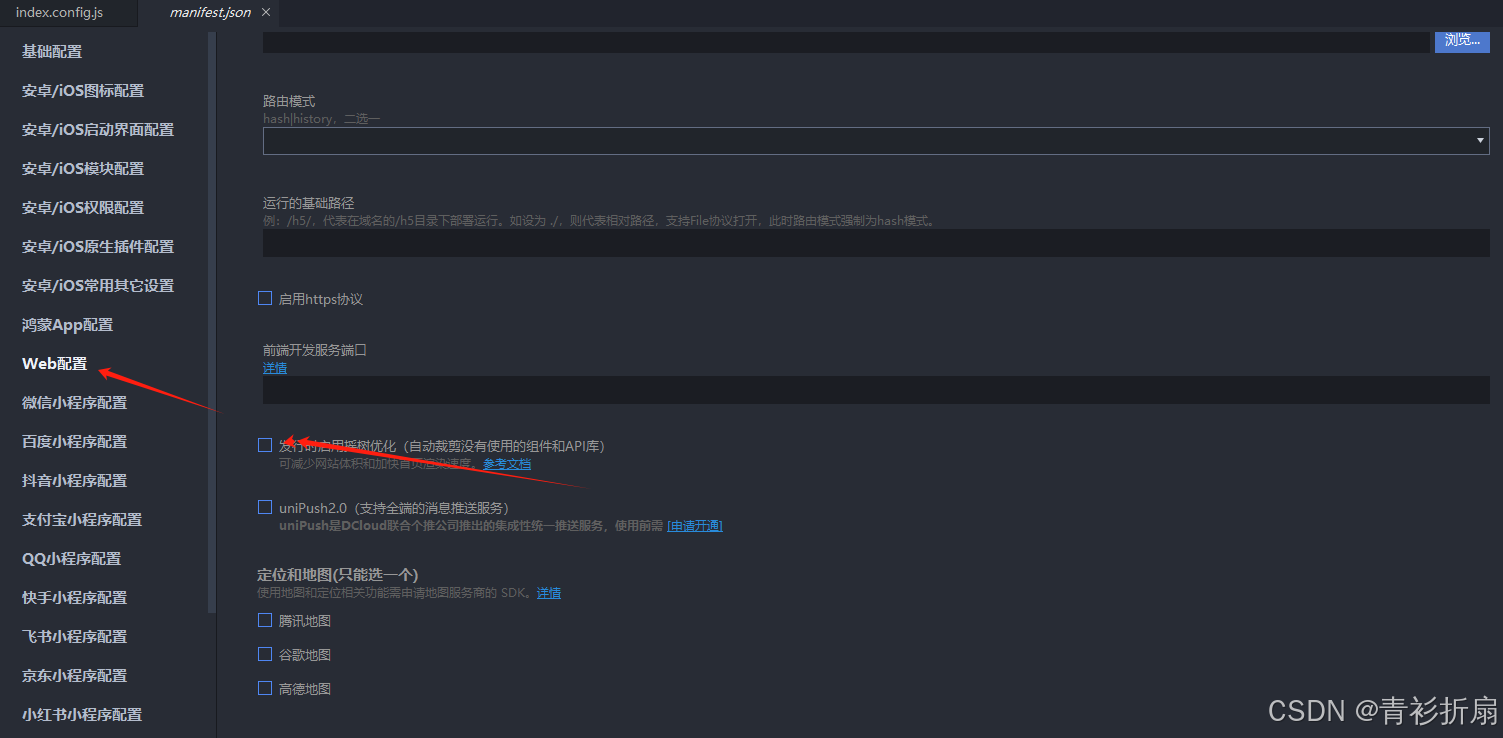
uni-app vue3版本打包h5后 页面跳转报错(uni[e] is not a function)
先看问题 解决方案 在HBuilderX项目中,若需在Web配置中显式关闭摇树优化(Tree Shaking),可以通过以下步骤实现:首先,在配置中打开摇树优化,然后再将其关闭。这样操作后,配置文件中会…...
)
大二java第一面小厂(挂)
第一场: mybatis怎么防止数据转义。 Hutool用的那些你常用的方法。 springboot的常用注解。 redis的多级缓存。 websocket怎么实现的多人协作编辑功能。 怎么实现的分库分表。 mysql里面的各种操作,比如说分表怎么分,分页查询怎么用。 mybat…...
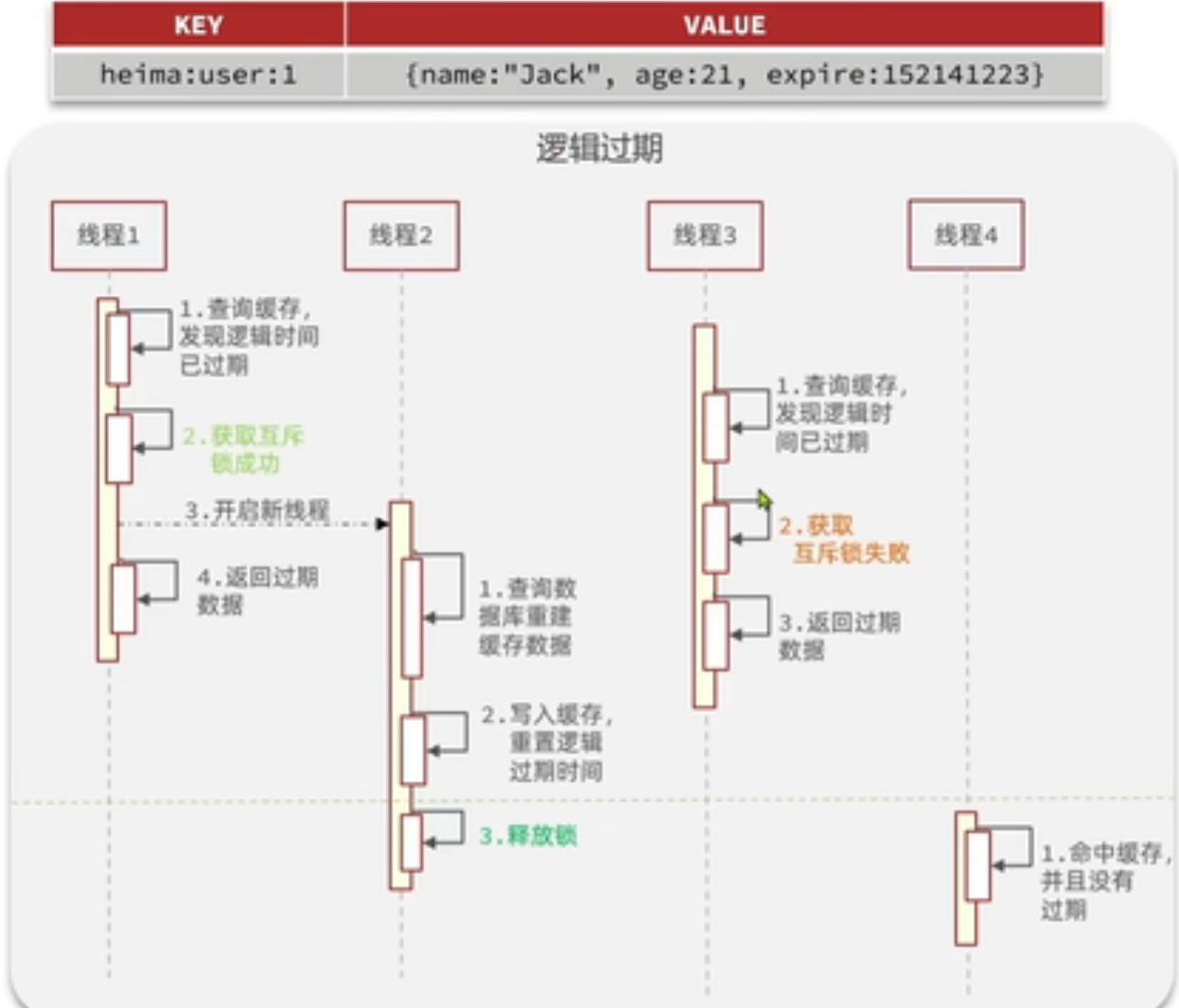
【Redis】缓存穿透、缓存雪崩、缓存击穿
1.缓存穿透 是指客户端请求的数据在缓存中和数据库中都不存在,这样缓存永远不会生效,导致请求直接穿透缓存到达数据库,给数据库带来压力的情况。 常见的解决方案有两种: 缓存空对象:实现简单,维护方便&am…...

双目云台摄像机:双摄安防功能全方位
双目云台摄像机是一种具有革命性设计的云台摄像机设备,其核心在于其独特的双摄像头配置。以下是对这种先进安防设备的详细介绍: 一、核心原理 双目云台摄像机的核心原理在于利用两个摄像头从不同角度捕捉同一场景,通过先进的算法计算两个图…...

告别数据僵尸!Redis实现自动清理过期键值对
在这个数据爆炸的时代,内存就像珍贵的土地资源,而Redis则是这片土地上的智能管家。它不仅能高效存储数据,还能像秋叶定时凋零般,让键值对在指定时间自动消失。今天,就让我们揭开这项"数据保鲜"技术的奥秘。 …...

web第三次课后作业--基于JDBC对mysql数据库的增删查改操作
一、工程搭建步骤 1.新建java项目,添加jdbc依赖 2.写java程序 3.添加mysql数据源,连接本地数据库 4.运行程序二、运行结果 三、代码 代码解析 加载数据驱动 try {Class.forName("com.mysql.jdbc.Driver"); } catch (ClassNotFoundExceptio…...

《P2345 [USACO04OPEN] MooFest G》
题目背景 P5094 [USACO04OPEN] MooFest G 加强版 题目描述 约翰的 n 头奶牛每年都会参加“哞哞大会”。 哞哞大会是奶牛界的盛事。集会上的活动很多,比如堆干草,跨栅栏,摸牛仔的屁股等等。 它们参加活动时会聚在一起,第 i 头…...

现代 Web 自动化测试框架对比:Playwright 与 Selenium 的深度剖析
现代 Web 自动化测试框架对比:Playwright 与 Selenium 的深度剖析 摘要:本文对 Playwright 与 Selenium 在开发适配性、使用难度、场景适用性及性能表现等方面进行了全面深入的对比分析。通过详细的技术实现细节阐述与实测数据支撑,为开发者…...

【网络协议】TCP、HTTP、MQTT 和 WebSocket 对比
从协议本质、工作原理、特点、应用场景等方面详细对比 TCP、HTTP、MQTT 和 WebSocket。 1. TCP(Transmission Control Protocol,传输控制协议) 本质 协议类型:传输层协议(OSI模型第4层)。核心功能&#x…...

Cython打包多层目录Python文件方法
为了使用Cython打包多层目录下的Python文件,并保持目录结构,请按照以下步骤操作: 步骤1:项目结构示例 假设项目结构如下: myproject/setup.pysrc/__init__.pymodule1.pysubdir/__init__.pymodule2.py步骤2ÿ…...