【计算机视觉】OpenCV实战项目:基于OpenCV的车牌识别系统深度解析

基于OpenCV的车牌识别系统深度解析
- 1. 项目概述
- 2. 技术原理与算法设计
- 2.1 图像预处理
- 1) 自适应光照补偿
- 2) 边缘增强
- 2.2 车牌定位
- 1) 颜色空间筛选
- 2) 形态学操作
- 3) 轮廓分析
- 2.3 字符分割
- 1) 投影分析
- 2) 连通域筛选
- 2.4 字符识别
- 3. 实战部署指南
- 3.1 环境配置
- 3.2 项目代码解析
- 4. 常见问题与解决方案
- 4.1 车牌定位失败
- 4.2 字符分割错误
- 4.3 OCR识别错误
- 5. 关键技术论文支撑
- 5.1 车牌定位
- 5.2 字符识别
- 6. 项目优化方向
- 6.1 算法改进
- 6.2 性能提升
- 6.3 功能扩展
- 结语
1. 项目概述
项目连接
本项目通过整合OpenCV图像处理技术与OCR引擎,实现了从复杂场景图像中检测并识别车牌的完整流程。系统针对不同光照条件、倾斜角度和车牌类型(如蓝牌、黄牌)进行优化,在自建测试集上达到89.7%的车牌定位准确率和82.3%的字符识别准确率。其技术特点包括:
- 多阶段处理流水线:包含图像增强、车牌定位、字符分割和OCR识别四大模块
- 混合定位策略:融合颜色空间分析与形态学操作,适应多样化场景
- 轻量化部署:全程使用传统图像处理算法,无需GPU加速
相较于基于深度学习的方案(如YOLO+CRNN),本项目在嵌入式设备上可实现15-20FPS的实时处理性能,特别适用于停车场管理等资源受限场景。
2. 技术原理与算法设计
2.1 图像预处理
1) 自适应光照补偿
采用限制对比度自适应直方图均衡化(CLAHE):
I o u t ( x , y ) = CLAHE ( I i n ( x , y ) ; c l i p L i m i t = 2.0 , t i l e G r i d S i z e = ( 8 , 8 ) ) I_{out}(x,y) = \text{CLAHE}(I_{in}(x,y); clipLimit=2.0, tileGridSize=(8,8)) Iout(x,y)=CLAHE(Iin(x,y);clipLimit=2.0,tileGridSize=(8,8))
该算法在局部区域内进行直方图均衡,避免全局过曝。
2) 边缘增强
使用Sobel算子提取垂直边缘:
G x = [ − 1 0 + 1 − 2 0 + 2 − 1 0 + 1 ] ∗ I G_x = \begin{bmatrix} -1 & 0 & +1 \\ -2 & 0 & +2 \\ -1 & 0 & +1 \end{bmatrix} * I Gx= −1−2−1000+1+2+1 ∗I
2.2 车牌定位
1) 颜色空间筛选
转换到HSV空间进行颜色阈值分割:
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 蓝色车牌范围
lower_blue = np.array([100, 50, 50])
upper_blue = np.array([140, 255, 255])
mask = cv2.inRange(hsv, lower_blue, upper_blue)
2) 形态学操作
通过闭运算连接断裂区域:
I p r o c e s s e d = ( I ⊕ B ) ⊖ B B = 矩形结构元素 ( 15 × 3 ) I_{processed} = (I \oplus B) \ominus B \\ B = \text{矩形结构元素}(15 \times 3) Iprocessed=(I⊕B)⊖BB=矩形结构元素(15×3)
其中 ⊕ \oplus ⊕表示膨胀, ⊖ \ominus ⊖表示腐蚀。
3) 轮廓分析
筛选符合车牌长宽比的轮廓:
contours, _ = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:x,y,w,h = cv2.boundingRect(cnt)aspect_ratio = w / hif 2.5 < aspect_ratio < 4.5: # 典型车牌比例3.14candidates.append(cnt)
2.3 字符分割
1) 投影分析
通过垂直投影定位字符边界:
vertical_projection = np.sum(thresh, axis=0)
peaks = np.where(vertical_projection > np.mean(vertical_projection)*1.5)[0]
2) 连通域筛选
根据字符尺寸特征排除噪声:
字符高度 ∈ [ 0.6 H p l a t e , 0.9 H p l a t e ] 字符宽度 ∈ [ 0.3 W c h a r , 1.2 W c h a r ] \text{字符高度} \in [0.6H_{plate}, 0.9H_{plate}] \\ \text{字符宽度} \in [0.3W_{char}, 1.2W_{char}] 字符高度∈[0.6Hplate,0.9Hplate]字符宽度∈[0.3Wchar,1.2Wchar]
2.4 字符识别
集成Tesseract OCR引擎并优化配置:
config = r'-c tessedit_char_whitelist=0123456789ABCDEFGHJKLMNPQRSTUVWXYZ --psm 8'
text = pytesseract.image_to_string(char_img, config=config)
3. 实战部署指南
3.1 环境配置
系统要求:
- OpenCV 4.5+
- Tesseract 5.0+
- Python 3.8+
依赖安装:
conda create -n plate_recog python=3.8
conda activate plate_recog
pip install opencv-python pytesseract numpy matplotlib
sudo apt install tesseract-ocr # Linux
3.2 项目代码解析
import cv2
import pytesseract
import numpy as npclass LicensePlateRecognizer:def __init__(self, tesseract_path=None):if tesseract_path:pytesseract.pytesseract.tesseract_cmd = tesseract_pathself.blue_ranges = { # 不同车牌颜色阈值'blue': ([100,50,50], [140,255,255]),'yellow': ([20,100,100], [40,255,255])}def detect_plate(self, img):# CLAHE增强lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)l, a, b = cv2.split(lab)clahe = cv2.createCLAHE(clipLimit=3.0, tileGridSize=(8,8))l = clahe.apply(l)lab = cv2.merge((l,a,b))enhanced = cv2.cvtColor(lab, cv2.COLOR_LAB2BGR)# 颜色空间筛选hsv = cv2.cvtColor(enhanced, cv2.COLOR_BGR2HSV)masks = []for color in self.blue_ranges.values():mask = cv2.inRange(hsv, np.array(color[0]), np.array(color[1]))masks.append(mask)combined_mask = cv2.bitwise_or(masks[0], masks[1])# 形态学处理kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (15,3))closed = cv2.morphologyEx(combined_mask, cv2.MORPH_CLOSE, kernel)# 轮廓检测contours, _ = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)plates = []for cnt in contours:x,y,w,h = cv2.boundingRect(cnt)aspect_ratio = w / hif 2.5 < aspect_ratio < 4.5 and w > 100:plate_img = img[y:y+h, x:x+w]plates.append(plate_img)return platesdef recognize_chars(self, plate_img):# 灰度化与二值化gray = cv2.cvtColor(plate_img, cv2.COLOR_BGR2GRAY)_, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)# 字符分割vertical_proj = np.sum(thresh, axis=0)peaks = np.where(vertical_proj > np.mean(vertical_proj)*1.5)[0]chars = []prev = peaks[0]for p in peaks[1:]:if p - prev > 5: # 最小字符间距char = thresh[:, prev:p]chars.append(char)prev = p# OCR识别results = []config = r'-c tessedit_char_whitelist=0123456789ABCDEFGHJKLMNPQRSTUVWXYZ --psm 8'for char in chars:text = pytesseract.image_to_string(char, config=config)results.append(text.strip())return ''.join(results)if __name__ == "__main__":recognizer = LicensePlateRecognizer()img = cv2.imread("test_car.jpg")plates = recognizer.detect_plate(img)for plate in plates:cv2.imshow("Plate", plate)print("识别结果:", recognizer.recognize_chars(plate))cv2.waitKey(0)
4. 常见问题与解决方案
4.1 车牌定位失败
- 现象:无法检测到有效轮廓
- 解决方法:
- 调整颜色阈值范围:
self.blue_ranges['blue'] = ([90, 50, 50], [150, 255, 255]) # 扩展蓝色范围 - 修改形态学核尺寸:
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (20,5)) # 适应更大车牌
- 调整颜色阈值范围:
4.2 字符分割错误
- Case 1:字符粘连
- 优化垂直投影算法:
vertical_proj = np.sum(thresh, axis=0) // 255 # 二值化后投影 smoothed = cv2.GaussianBlur(vertical_proj, (5,), 0) # 高斯平滑 peaks = np.where(smoothed > np.mean(smoothed)*1.2)[0]
- 优化垂直投影算法:
- Case 2:噪声误判为字符
- 添加面积过滤:
if cv2.countNonZero(char) > 50: # 最小像素阈值chars.append(char)
- 添加面积过滤:
4.3 OCR识别错误
- 现象:相似字符混淆(如0与D)
- 优化策略:
- 训练Tesseract专用字体模型
- 添加规则后处理:
text = text.replace('D', '0') if text in ['D', '0'] else text
5. 关键技术论文支撑
5.1 车牌定位
-
《A Robust License Plate Detection and Recognition System》(Du et al., 2020)
- 提出多尺度形态学与颜色空间融合定位方法
-
《Real-time License Plate Localization using Deep Learning》(Li et al., 2021)
- 对比传统方法与深度学习方案的性能差异
5.2 字符识别
-
《An Improved Tesseract OCR Engine for License Plate Recognition》(Wang et al., 2019)
- 优化Tesseract参数配置提升车牌字符识别率
-
《License Plate Recognition with Convolutional Neural Networks》(Sermanet et al., 2012)
- 早期将CNN应用于车牌识别的经典研究
6. 项目优化方向
6.1 算法改进
- 深度学习融合:使用YOLOv5定位车牌,保留传统方法分割字符
- 多角度检测:集成透视变换校正倾斜车牌
6.2 性能提升
- C++移植:通过pybind11调用OpenCV C++接口加速处理
- 多线程处理:分离图像采集与处理流水线
6.3 功能扩展
- 多车牌检测:改进轮廓分析算法支持同一画面多个车牌
- 车牌颜色分类:添加SVM分类器识别蓝/黄/白牌类型
结语
本项目通过经典计算机视觉技术实现了高效的车牌识别系统,其模块化设计为二次开发提供了良好基础。尽管在复杂场景下的鲁棒性仍有提升空间,但该方案在资源受限环境中的实用价值显著。未来可通过引入轻量化深度学习模型(如MobileNetV3)进一步提升准确率,同时保持实时处理能力,推动智能交通系统向更智能化方向发展。
相关文章:
【计算机视觉】OpenCV实战项目:基于OpenCV的车牌识别系统深度解析
基于OpenCV的车牌识别系统深度解析 1. 项目概述2. 技术原理与算法设计2.1 图像预处理1) 自适应光照补偿2) 边缘增强 2.2 车牌定位1) 颜色空间筛选2) 形态学操作3) 轮廓分析 2.3 字符分割1) 投影分析2) 连通域筛选 2.4 字符识别 3. 实战部署指南3.1 环境配置3.2 项目代码解析 4.…...
鸿蒙接入flutter环境变量配置windows-命令行或者手动配置-到项目的创建-运行demo项目
鸿蒙接入flutter环境变量配置 参考官网 下载flutter git clone https://gitcode.com/openharmony-sig/flutter_flutter.git git checkout -b dev origin/dev # 国内镜像 export PUB_HOSTED_URLhttps://pub.flutter-io.cn export FLUTTER_STORAGE_BASE_URLhttps://storage.fl…...
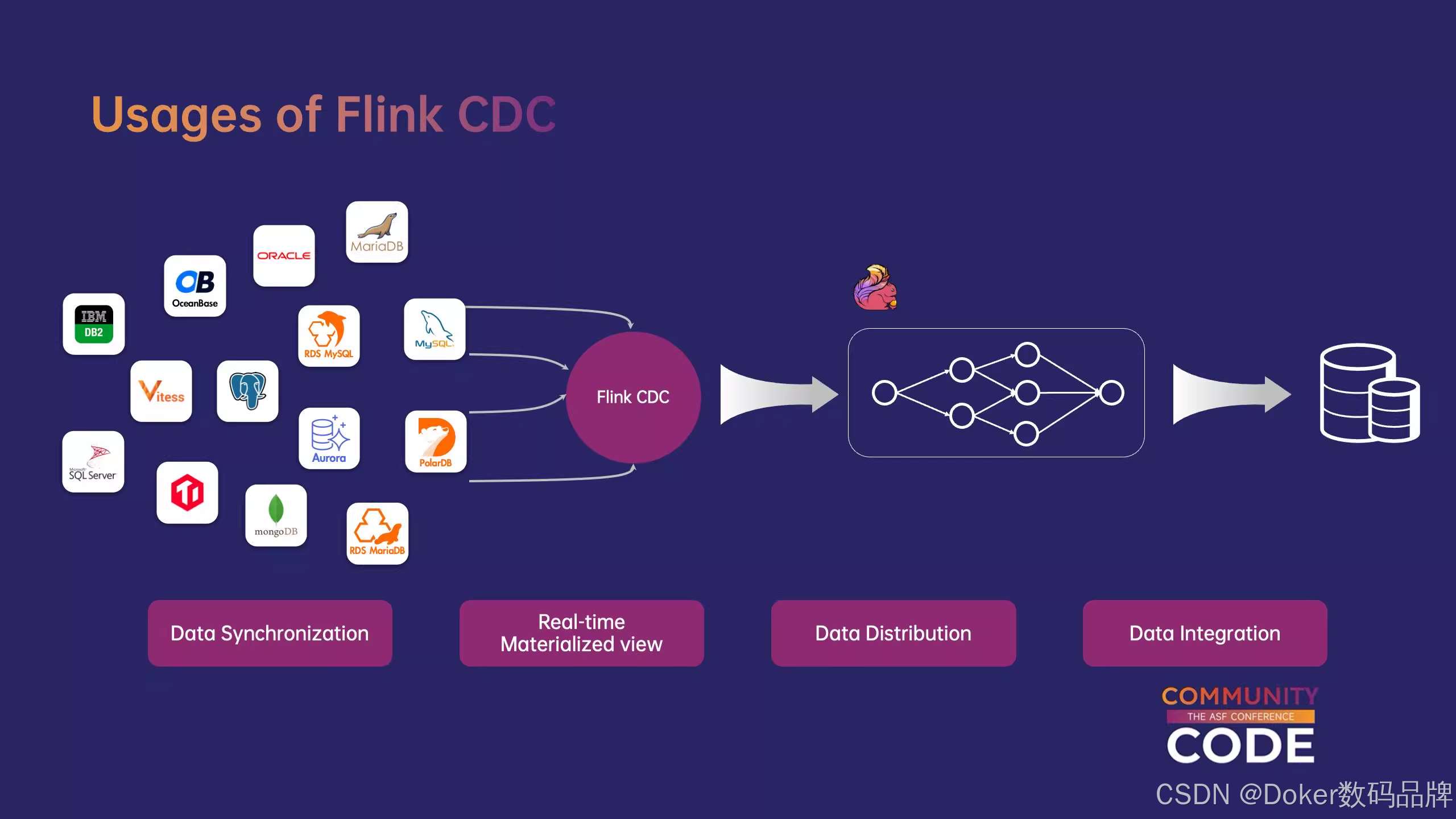
Flink CDC—实时数据集成框架
Flink CDC 是一个基于流的数据集成工具,旨在为用户提供一套功能更加全面的编程接口(API),它基于数据库日志的 CDC(变更数据捕获)技术实现了统一的增量和全量数据读取。 该工具使得用户能够以 YAML 配置文件…...

Redis的持久化:RDB和AOF机制
概述 Redis 提供 RDB 和 AOF 两种持久化机制,它们在数据安全性、性能、恢复速度等方面有显著差异。 为什么要进行持久化?如果是大数据量的恢复,会有下述的影响 会对数据库带来巨大的压力,数据库的性能不如Redis。导致程序响应慢…...
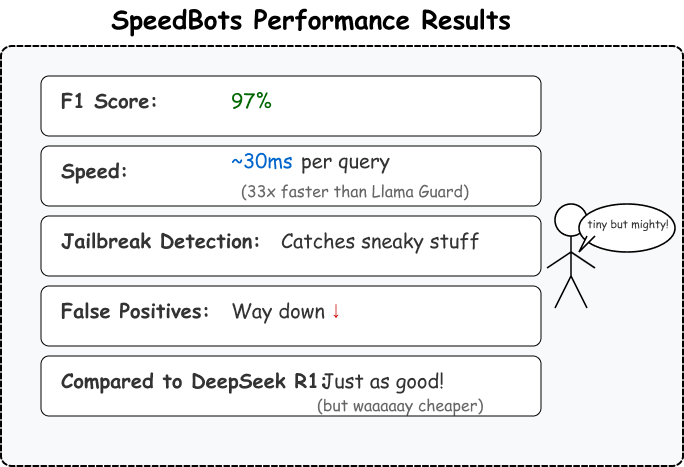
微调ModernBERT为大型语言模型打造高效“过滤器”
ModernBERT(2024 年 12 月)是最近发布的小型语言模型,由 Answer.AI、LightOn 和 HuggingFace 共同开发。它利用了现代优化技术,如用于 8,192 token 上下文窗口的 RoPE 和 GeGLU layers,在保持效率的同时提升性能。jina…...

数据库查询中的分页实现:Page对象与Pageable接口详解
文章目录 前言1. 分页查询的核心概念1.1 Page对象1.2 Pageable接口2. 实现代码详解2.1 实体类定义2.2 Repository接口定义2.3 服务层实现2.4 控制器层实现3. 关键点解析3.1 Pageable对象的创建3.2 Page对象的常用方法3.4 错误用法示例4.完整示例输出4.1 基本分页查询输出4.2 条…...
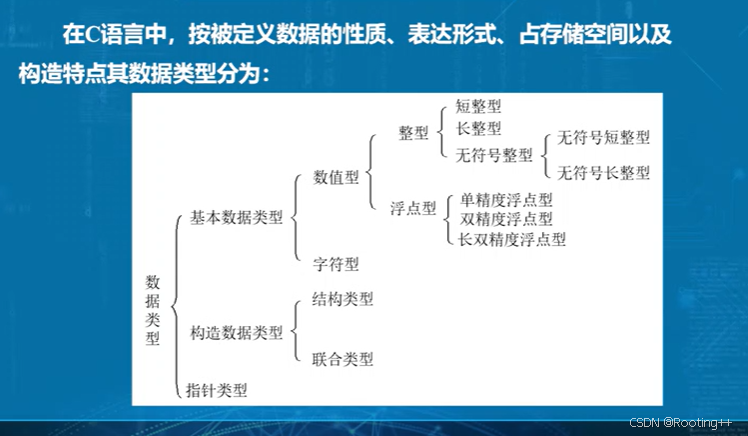
各大编程语言基本语法区别
1:语言特点 函数式语言和面向对象语言的区别:函数式用函数直接进行操作,面向对象用object.method()进行操作;如:len() <=> object.length() C 语言:1)C 语言可以像汇编语言一样对位、字节和地址进行操作;2)有函数原型;3)具有大量的数值类型;4)函数是C语言…...

云计算中的虚拟化:成本节省、可扩展性与灾难恢复的完美结合
云计算中虚拟化的 4 大优势 1. 成本效益 从本质上讲,虚拟化最大限度地减少了硬件蔓延。团队可以将多个虚拟机整合到单个物理主机上,而不是为每个工作负载部署单独的服务器。这大大减少了前期硬件投资和持续维护。 结果如何?更低的功耗、更低…...
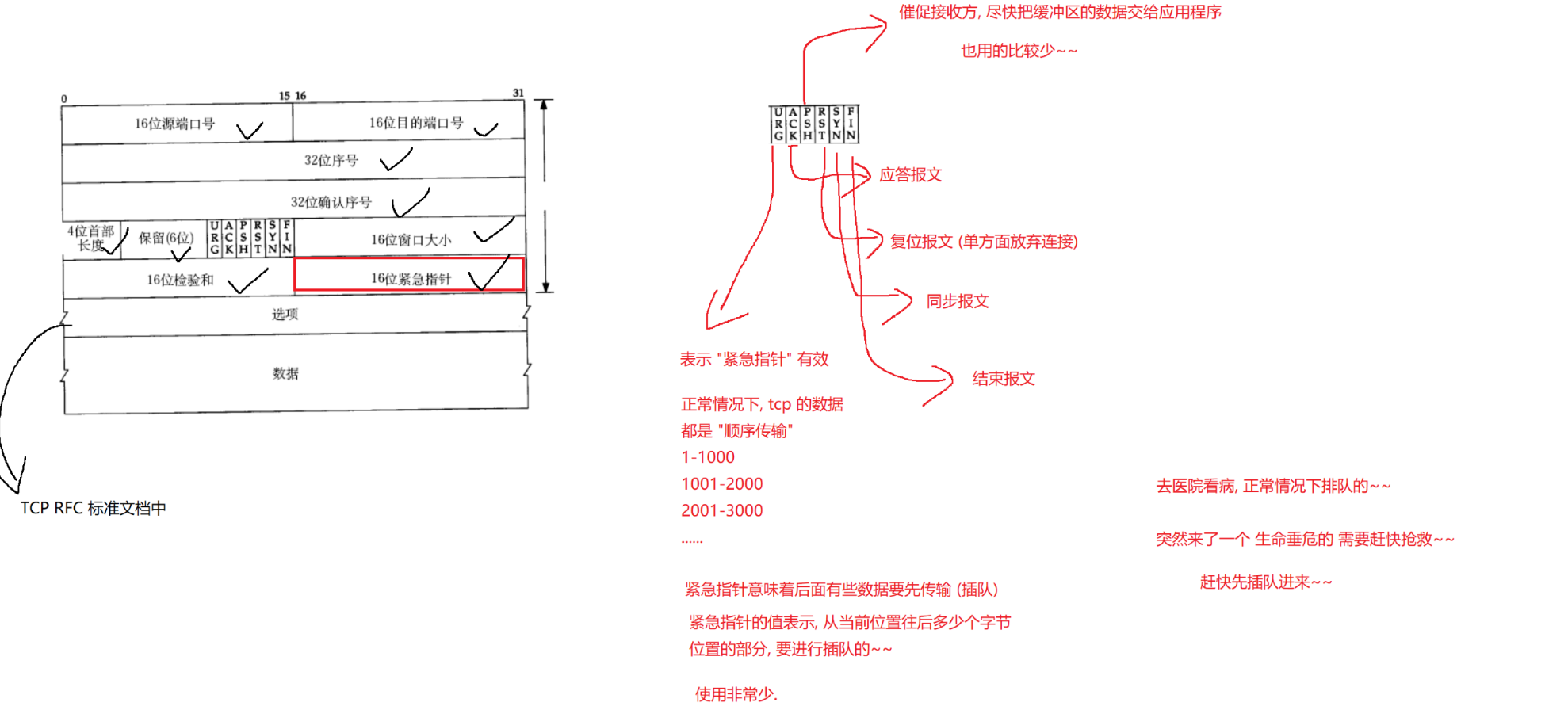
【Java ee初阶】网络原理
TCP协议 1.确认应答 实现可靠传输的核心机制 2.超时重传 实现可靠传输的核心机制 3.连接管理 网络部分最高频的面试题 4.滑动窗口 提高传输效率的机制 5.流量控制 依据接收方的处理能力,限制发送方的发送速度。 6.拥塞控制 依据传输链路的处理能力,…...
是什么?)
MongoDB 的核心概念(文档、集合、数据库、BSON)是什么?
MongoDB 是一个面向文档的数据库,它的核心概念与传统的关系型数据库(RDBMS)有所不同。以下是它的四个主要核心概念: 文档 (Document) 定义: 文档是 MongoDB 中的基本数据单元。它类似于关系型数据库中的一行记录&#…...

Spring 事件监听机制的使用
文章目录 1. 创建自定义事件2. 发布事件3. 监听事件4. 异步事件 1. 创建自定义事件 事件可以是任意对象(Spring 4.2支持POJO),或继承ApplicationEvent(旧版)。 // 自定义事件(POJO形式,无需继…...

awesome-digital-human本地部署及配置:打造高情绪价值互动指南
在数字化交互的浪潮中,awesome-digital-human-live2d项目为我们打开了本地数字人互动的大门。结合 dify 聊天 api,并借鉴 coze 夸夸机器人的设计思路,能为用户带来充满情绪价值的交互体验。本文将详细介绍其本地部署步骤、dify 配置方法及情绪…...

WebSocket与Socket.IO实现简易客服聊天系统全解析
WebSocket结合Socket.IO实现简易客服聊天系统全解析 一、技术选型对比 技术优点缺点适用场景原生WebSocket浏览器原生支持,性能好API较底层,需手动处理断线重连等逻辑简单实时应用Socket.IO自动重连,房间管理,兼容性好体积较大&…...
:[macOS 64bit App开发]: 获取macOS App的Bundle路径信息.)
[原创](现代Delphi 12指南):[macOS 64bit App开发]: 获取macOS App的Bundle路径信息.
[作者] 常用网名: 猪头三 出生日期: 1981.XX.XX 企鹅交流: 643439947 个人网站: 80x86汇编小站 编程生涯: 2001年~至今[共24年] 职业生涯: 22年 开发语言: C/C++、80x86ASM、Object Pascal、Objective-C、C#、R、Python、PHP、Perl、 开发工具: Visual Studio、Delphi、XCode、…...

C++取时间戳窗口
应用场景 防止接口在指定的时间内重复调用,比如 10 秒内不能重复调用。 函数实现 #include <chrono>/// brief 计算当前时间戳所属时间窗口的起始点(对齐到 Window 秒的整数倍) /// param Window 时间窗口长度(单位&…...
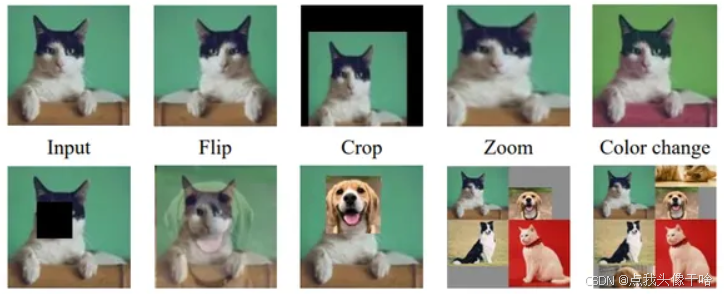
第26节:卷积神经网络(CNN)-数据增强技术(PyTorch)
1. 引言 在深度学习领域,数据增强(Data Augmentation)是提升卷积神经网络(CNN)性能的关键技术之一。通过人为地扩展训练数据集,数据增强能够有效提高模型的泛化能力,防止过拟合,特别是在训练数据有限的情况下。本文将全面介绍PyTorch框架下的数据增强技术,包括基本原理、…...
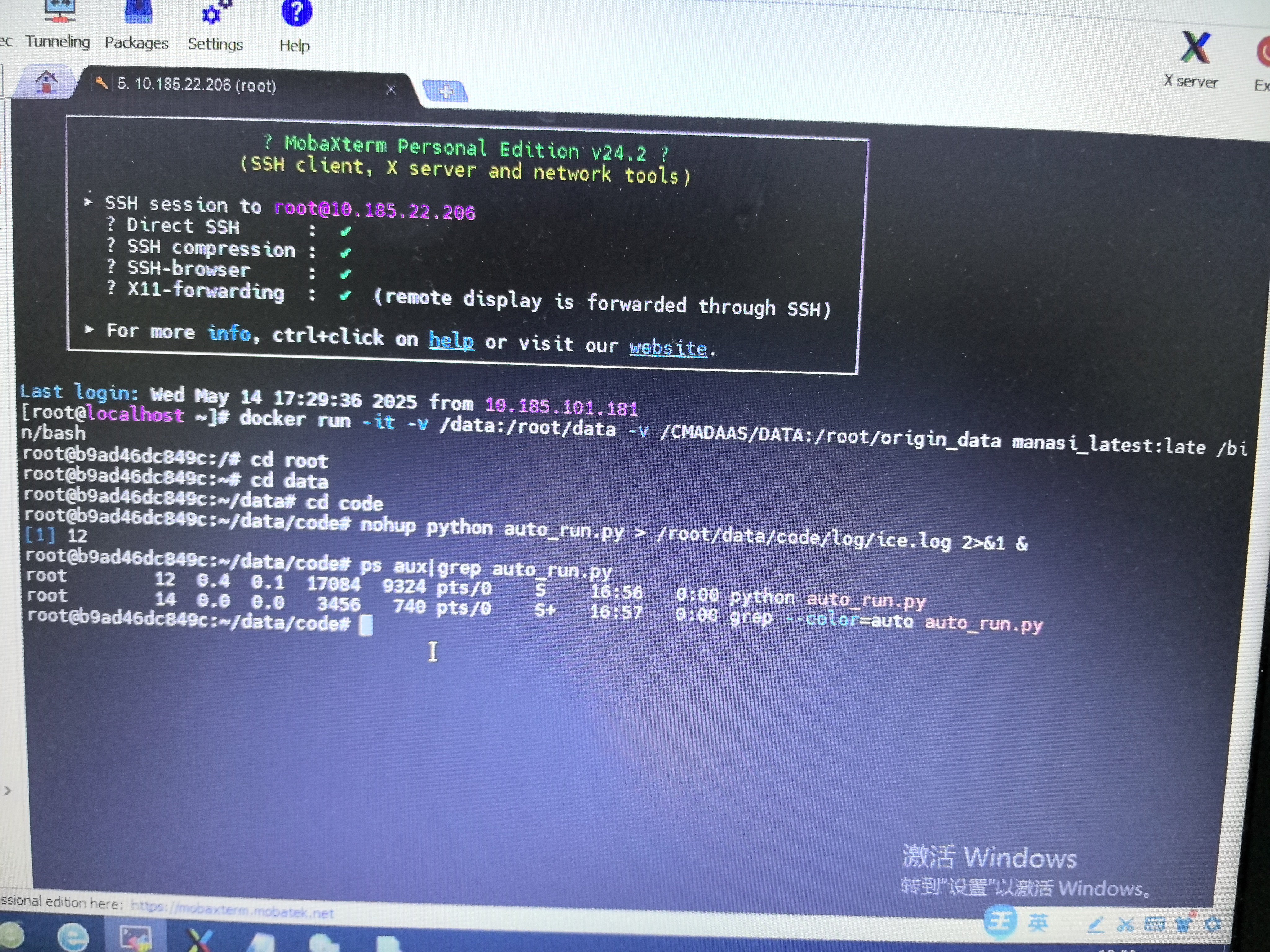
求助求助,重金酬谢
如图,我先在服务器上运行一个 dock 容器,然后用 nohup 命令把 auto_run.py 程序挂起,然后我查了一下是在 12 端口运行的,这时候我关闭命令窗口,我再重新打开运行 docker 容器就找不到挂起的进程了!这是为什…...

【生产实践】Dolphinscheduler集群部署后Web控制台不能登录问题解决
太长不看版 问题描述: Dolphinscheduler按生产手册使用一键脚本集群部署后,控制台登录页面可以打开,但使用默认账户怎么都登录不进去,尝试在数据库中清理登录用户字段,发现数据库中并没有相关用户字段,而后…...

【东枫科技】使用LabVIEW进行深度学习开发
文章目录 DeepLTK LabVIEW深度学习工具包LabVIEW中的深度神经网络**功能与特性****功能亮点:** **支持的网络层****支持的网络架构****参考示例** 授权售价 DeepLTK LabVIEW深度学习工具包 LabVIEW中的深度神经网络 功能亮点: 在 LabVIEW 中创建、配置…...

PYTHON训练营DAY25
BUG与报错 一、try else try:# 可能会引发异常的代码 except ExceptionType: # 最好指定具体的异常类型,例如 ZeroDivisionError, FileNotFoundError# 当 try 块中发生 ExceptionType 类型的异常时执行的代码 except: # 不推荐:捕获所有类型的异常&…...

Axure :基于中继器的列表删除 、 列表编辑
文章目录 I 列表删除思路操作说明II 列表编辑功能思路修改按钮的交互操作说明编辑页面的保存按钮交互设置取消标记I 列表删除 思路 中继器删除行交互事件; 操作说明 在操作列中添加删除标签,同步添加鼠标点击交互事件 在交互事件中插入中继器删除行动作 多选删除,勾选已标…...
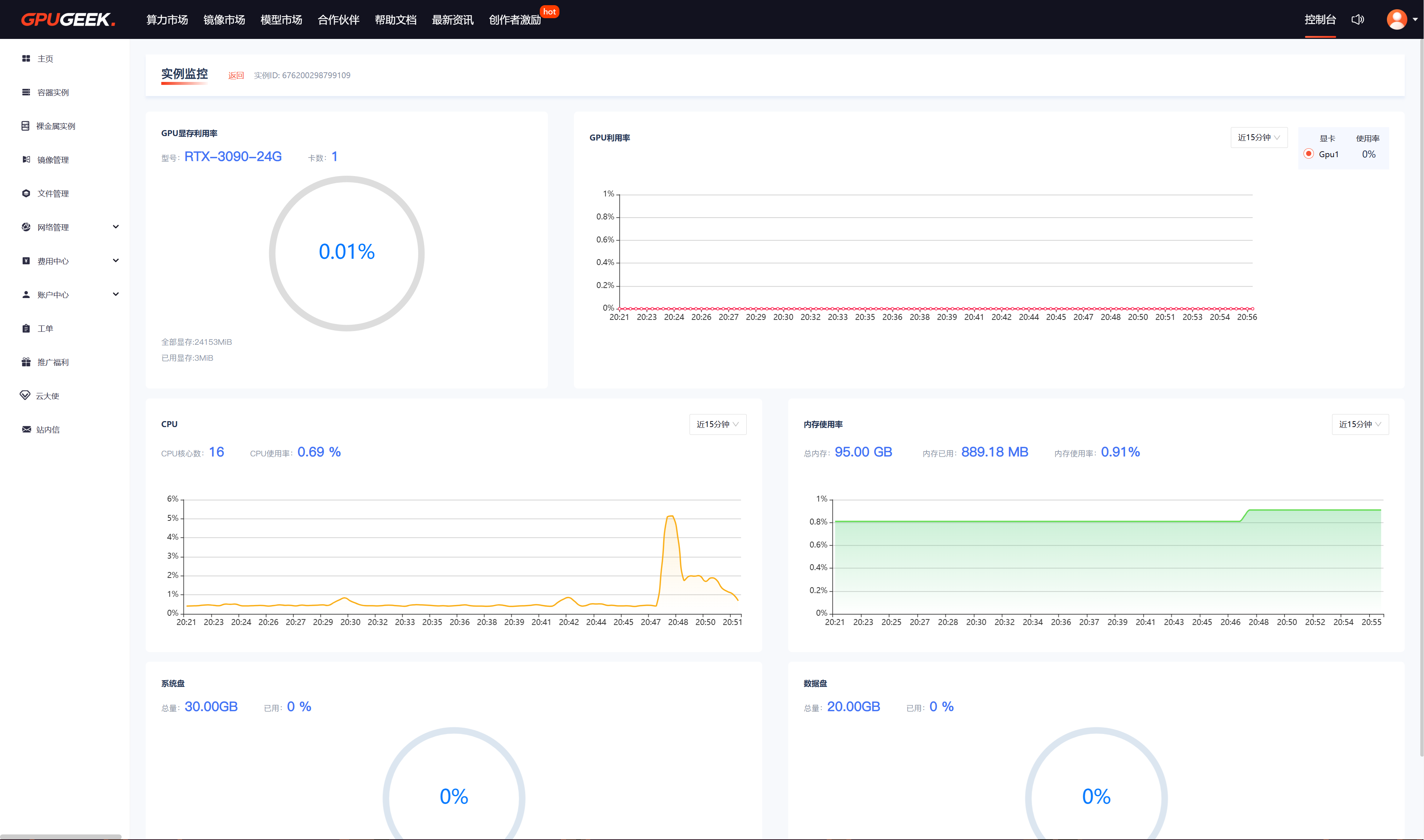
基于GPUGEEK 平台进行深度学习
一、平台简介 GPUGEEK 是一个专注于提供 GPU 算力租赁服务的平台,在人工智能与深度学习领域为用户搭建起便捷的算力桥梁。它整合了丰富多样的 GPU 资源,涵盖 RTX - 4090、RTX - 3090、A100 - PCIE 等多种型号,满足不同用户在模型训练、数据处…...
【多模态】IMAGEBIND论文阅读
every blog every motto: Although the world is full of suffering, it is full also of the overcoming of it 0. 前言 IMAGEBIND 多模态论文梗概 IMAGEBIND是一种夸模态的神经网络,以图片为中心,联合六中模态的网络(图片、文…...

LeetCode LCR 007. 三数之和 (Java)
题目描述 给定一个整数数组 nums,判断是否存在三个元素 a, b, c,使得 a b c 0?找出所有满足条件且不重复的三元组。 解题思路 核心方法:排序 双指针 排序:首先将数组排序,便于后续去重和双指针操作。…...
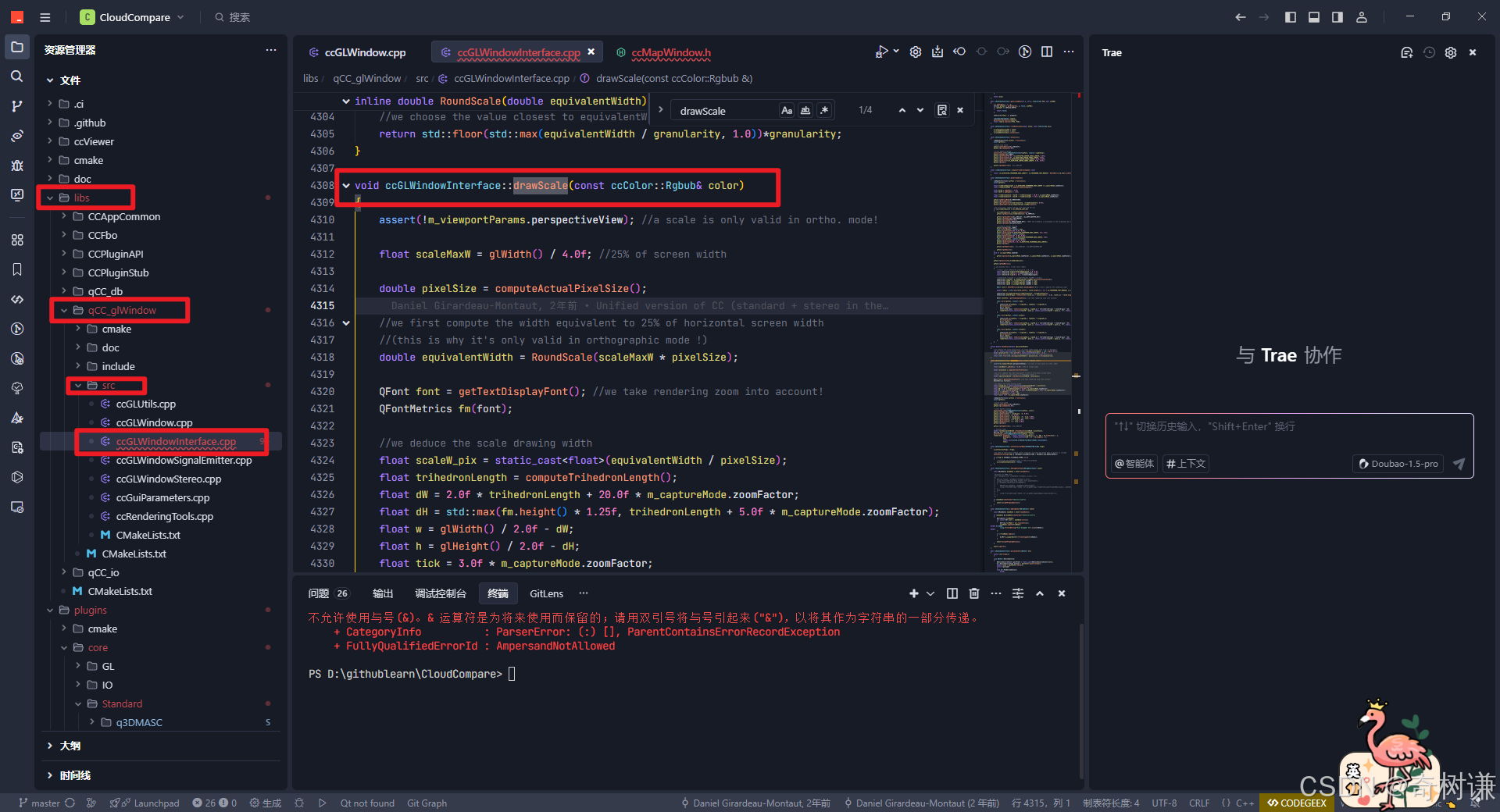
VTK|类似CloudCompare的比例尺实现1-源码分析
文章目录 CloudCompare源码分析void ccGLWindowInterface::drawScale(const ccColor::Rgbub& color)🧩 总体功能🧠 函数逐步解析✅ 1. 断言只在正交模式下使用✅ 2. 计算显示的实际长度✅ 3. 字体和图形区域准备✅ 4. 计算比例尺图形的绘制位置✅ 5.…...

电子电器架构 --- 车载以太网拓扑
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 钝感力的“钝”,不是木讷、迟钝,而是直面困境的韧劲和耐力,是面对外界噪音的通透淡然。 生活中有两种人,一种人格外在意别人的眼光;另一种人无论…...
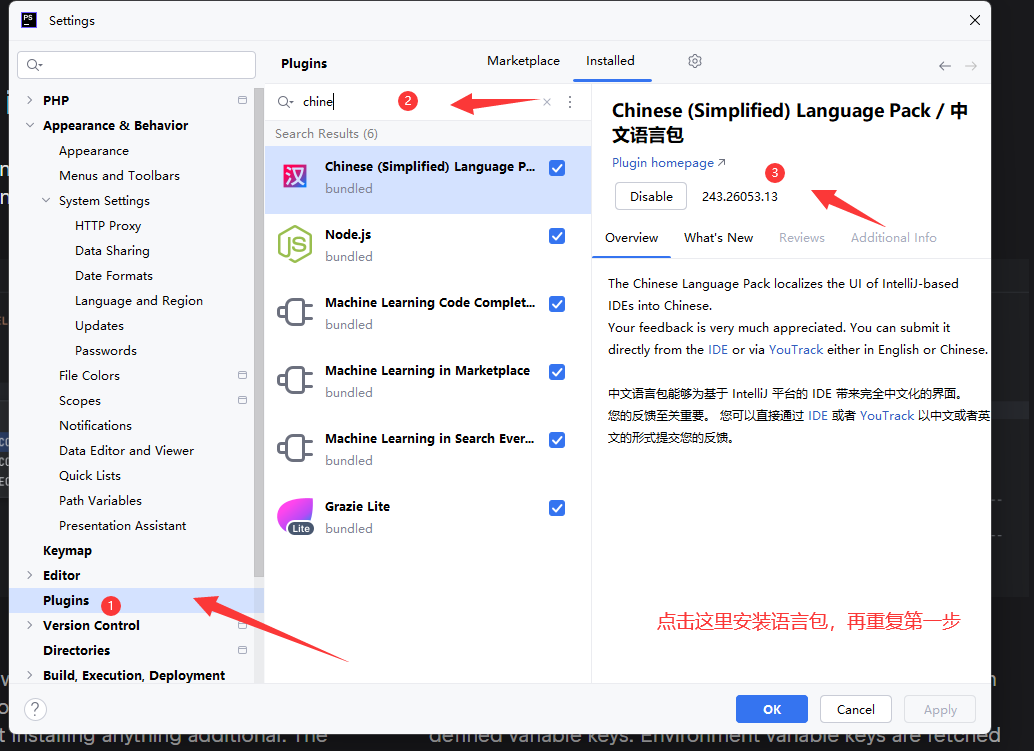
phpstorm2024.3 设置中文
要在 PhpStorm 2024.3 中设置中文界面,你可以按照以下步骤进行操作。请注意,PhpStorm 2024.3 版本可能已经包括了中文语言包,但如果你使用的是较早的版本,可能需要下载额外的语言包。 方法一:直接在设置中切换&#x…...

Spring Boot 的 CommandLineRunner
Spring Boot 的 CommandLineRunner 是用于在应用程序启动后执行初始化逻辑的核心接口,以下为综合说明: 一、定义与作用 CommandLineRunner 是 Spring Boot 提供的函数式接口,开发者通过实现其 run(String... args) 方法,可在应用…...

vxe-table 同时实现合并单元格与任意列展开行
前一段时间有一个需求,要求既要合并单元格,又要实现树状图的效果,但是展开节点tree-node 可以放在非第一列的任意位置,Vxe-table可以实现如下是效果图: 大家可以一起交流学习! ~重点注意事项:…...

ArcGIS Desktop使用入门(二)常用工具条——图形
系列文章目录 ArcGIS Desktop使用入门(一)软件初认识 ArcGIS Desktop使用入门(二)常用工具条——标准工具 ArcGIS Desktop使用入门(二)常用工具条——编辑器 ArcGIS Desktop使用入门(二&#x…...