阿克曼-幻宇机器人系列教程3- 机器人交互实践(Message)
上一篇文章介绍了如何通过topic操作命令实现与机器人的交互,本篇我们介绍如何通过Message(即topic的下一级)实现与机器人的交互。
和topic一样,首先在一个终端通过ssh命令登录机器人、启动机器人,然后打开另外一个终端执行操作命令。
1. Message操作命令
1.1 获取Message操作命令机器详解的语句
rosmsg --help返回的内容,总共6种操作命令
rosmsg is a command-line tool for displaying information about ROS Message types.Commands:rosmsg show Show message descriptionrosmsg info Alias for rosmsg showrosmsg list List all messagesrosmsg md5 Display message md5sumrosmsg package List messages in a packagerosmsg packages List packages that contain messagesType rosmsg <command> -h for more detailed usage2. Message操作命令用法
2.1 命令格式
rosmsg show+消息
2.2 以雷达为例
继续以/scan为例,它封装的是雷达数据
在室内机器人移动导航过程中,激光雷达是很重要的传感器,它时刻反馈机器人周边的障碍物信息,在机器人建图、定位、导航算法中起到重要的作用。
在提供的树莓派固件中,已经编写和编译了ROS的激光雷达节点。
rostopic type /scan #查看雷达数据格式
sensor_msgs/LaserScan我们使用rosmsg show来获取雷达数据内容
rosmsg show sensor_msgs/LaserScan
std_msgs/Header headeruint32 seqtime stampstring frame_idfloat32 angle_minfloat32 angle_maxfloat32 angle_incrementfloat32 time_incrementfloat32 scan_timefloat32 range_minfloat32 range_maxfloat32[] rangesfloat32[] intensitiesHeader : 是一个结构体,包含 seq、stamp、frame_id。
-
seq 扫描顺序增加的 id 序列
-
stamp 激光数据的时间戳
-
frame-id 是扫描数据的名字
-
angle_min:开始扫描的角度
-
angle_max:结束扫描的角度
-
angle_increment:每次扫描增加的角度
-
time_increment:测量的时间间隔
-
scan_time :扫描的时间间隔
-
range_min:测距的最小值
-
range_max:测距的最大值
-
ranges:测量的距离数据,数组长度和雷达分辨率相关
-
intensities:与设备有关,输出测距强度数据
3. Msaage和Topic的操作关系
至此我们已经把topic和message都进行了介绍,现在我们说明下两者之间的操作关系。
通常来说先执行topic操作,再执行message操作,因为message是topic的子集。
以机器人雷达为例,首先需要 订阅或确认 topic,即定义数据传递的“频道”。然后,发布消息 才能通过该频道成功传递数据。这样的操作顺序确保了消息在系统中能够有效流动。
为何先订阅 topic 后发布消息?
-
消息的传递是基于订阅的:
你可以把订阅topic看作是打开一个接收信道,消息必须通过该信道传递才能被正确接收。如果你在没有订阅topic的情况下发布消息,系统就不知道应该把消息送给谁。换句话说,消息没有目的地,无法到达消费者端。 -
话题创建是基础:
在这个系统中,topic就是雷达数据的专用通道。要确保消息能被正确分发,必须先确保topic存在,且有正确的订阅者。 -
确保系统协调:
如果一个模块在订阅topic后,雷达模块开始发布数据,那么在发布的同时,系统保证订阅者可以实时收到这些消息。如果没有预先订阅,消息的接收者就会错过或无法处理这些数据。
结合实际操作步骤
-
先定义
topic(如果尚未存在),比如"radar/data"。这告诉系统所有需要接收雷达数据的模块可以订阅这个 topic。 -
订阅
topic,比如机器人控制模块、导航模块、决策模块会订阅"radar/data",这样它们就可以接收到雷达传感器传来的数据。 -
发布消息,雷达传感器模块将通过
topic"radar/data"来发布雷达数据。
相关文章:
)
阿克曼-幻宇机器人系列教程3- 机器人交互实践(Message)
上一篇文章介绍了如何通过topic操作命令实现与机器人的交互,本篇我们介绍如何通过Message(即topic的下一级)实现与机器人的交互。 和topic一样,首先在一个终端通过ssh命令登录机器人、启动机器人,然后打开另外一个终端…...
【MySQL】服务器配置与管理(相关日志)
🔥个人主页: 中草药 🔥专栏:【MySQL】探秘:数据库世界的瑞士军刀 一、系统变量和选项 当通过mysqld启动数据库服务器时,可以通过选项文件或命令行中提供选项。一般,为了确保服务器在每次运行时…...
【问题】Watt加速github访问速度:好用[特殊字符]
前言 GitHub 是全球知名的代码托管平台,主要用于软件开发,提供 Git 仓库托管、协作工具等功能,经常要用到,但是国内用户常因网络问题难以稳定访问 。 Watt Toolkit(原名 Steam)是由江苏蒸汽凡星科技有限公…...
vue3:十三、分类管理-表格--行内按钮---行删除、批量删除实现功能实现
一、实现效果 增加行内按钮的样式效果,并且可以根绝父组件决定是否显示 增加行内删除功能、批量删除功能 二、增加行内按钮样式 1、增加视图层按钮 由于多个表格都含有按钮功能,所以这里直接在子组件中加入插槽按钮 首先增加表格行<el-table-column></el-table-…...

Web3.0:互联网的去中心化未来
随着互联网技术的不断发展,我们正站在一个新时代的门槛上——Web3.0时代。Web3.0不仅仅是一个技术升级,它更是一种全新的互联网理念,旨在通过去中心化技术重塑网络世界。本文将深入探讨Web3.0的核心概念、技术基础、应用场景以及它对未来的深…...
浏览器设置代理ip后不能上网?浏览器如何改ip地址教程
使用代理IP已成为许多用户保护隐私、绕过地域限制或进行网络测试的常见做法。当浏览器设置代理IP后无法上网时,通常是由于代理配置问题或代理服务器本身不可用。以下是排查和解决问题的详细步骤,以及更改浏览器IP的方法: 一、代理设置后无法上…...

Java应用OOM排查:面试通关“三部曲”心法
开篇点题:OOM——Java应用的“内存爆仓”警报 OOM (OutOfMemoryError) 是啥病?想象一下,你的Java应用程序是一个大仓库,内存就是仓库的存储空间。如果货物(程序运行时创建的对象)越来越多,超出了…...

R语言的专业网站top5推荐
李升伟 以下是学习R语言的五个顶级专业网站推荐,涵盖教程、社区、资源库和最新动态: 1.R项目官网 (r-project.org) R语言的官方网站,提供软件下载、文档、手册和常见问题解答。特别适合初学者和高级用户,是获取R语言核心资源的…...
:设计原则(二):DIP、ISP、LoD)
设计模式系列(03):设计原则(二):DIP、ISP、LoD
本文为设计模式系列第3篇,聚焦依赖倒置、接口隔离、迪米特法则三大设计原则,系统梳理定义、实际业务场景、优缺点、最佳实践与常见误区,适合系统学习与团队协作。 目录 1. 引言2. 依赖倒置原则(DIP)3. 接口隔离原则(ISP)4. 迪米特法则(LoD)5. 常见误区与反例6. 最佳实…...

Java Socket编程完全指南:从基础到实战应用
Socket编程是构建网络应用的基石,Java通过java.net包提供了强大的Socket API。本文将深入解析Java Socket类的核心用法,涵盖TCP/UDP协议实现、多线程通信及性能优化技巧,助您快速掌握网络编程精髓。 一、Socket编程核心概念 1.1 网络通信模型…...

[训练和优化] 3. 模型优化
👋 你好!这里有实用干货与深度分享✨✨ 若有帮助,欢迎: 👍 点赞 | ⭐ 收藏 | 💬 评论 | ➕ 关注 ,解锁更多精彩! 📁 收藏专栏即可第一时间获取最新推送🔔…...

基于FPGA的车速检测系统仿真设计与实现
标题:基于FPGA的车速检测系统仿真设计与实现 内容:1.摘要 本文旨在设计并实现基于FPGA的车速检测系统仿真。随着汽车行业的快速发展,精确的车速检测对于车辆的安全性和性能评估至关重要。本研究采用FPGA作为核心处理单元,结合传感器数据采集与处理技术进…...

无人设备遥控器之无线通讯技术篇
无人设备遥控器的无线通讯技术是确保遥控操作准确、稳定、高效进行的关键。以下是对无人设备遥控器无线通讯技术的详细解析: 一、主要无线通讯技术类型 Wi-Fi通讯技术 原理:基于IEEE 802.11标准,通过无线接入点(AP)…...
:Redis + Lua为什么可以实现原子性)
Redis(2):Redis + Lua为什么可以实现原子性
Redis 作为一款高性能的键值对存储数据库,与 Lua 脚本相结合,为实现原子性操作提供了强大的解决方案,本文将深入探讨 Redis Lua 实现原子性的相关知识 原子性概念的厘清 在探讨 Redis Lua 的原子性之前,我们需要明确原子性的概念…...
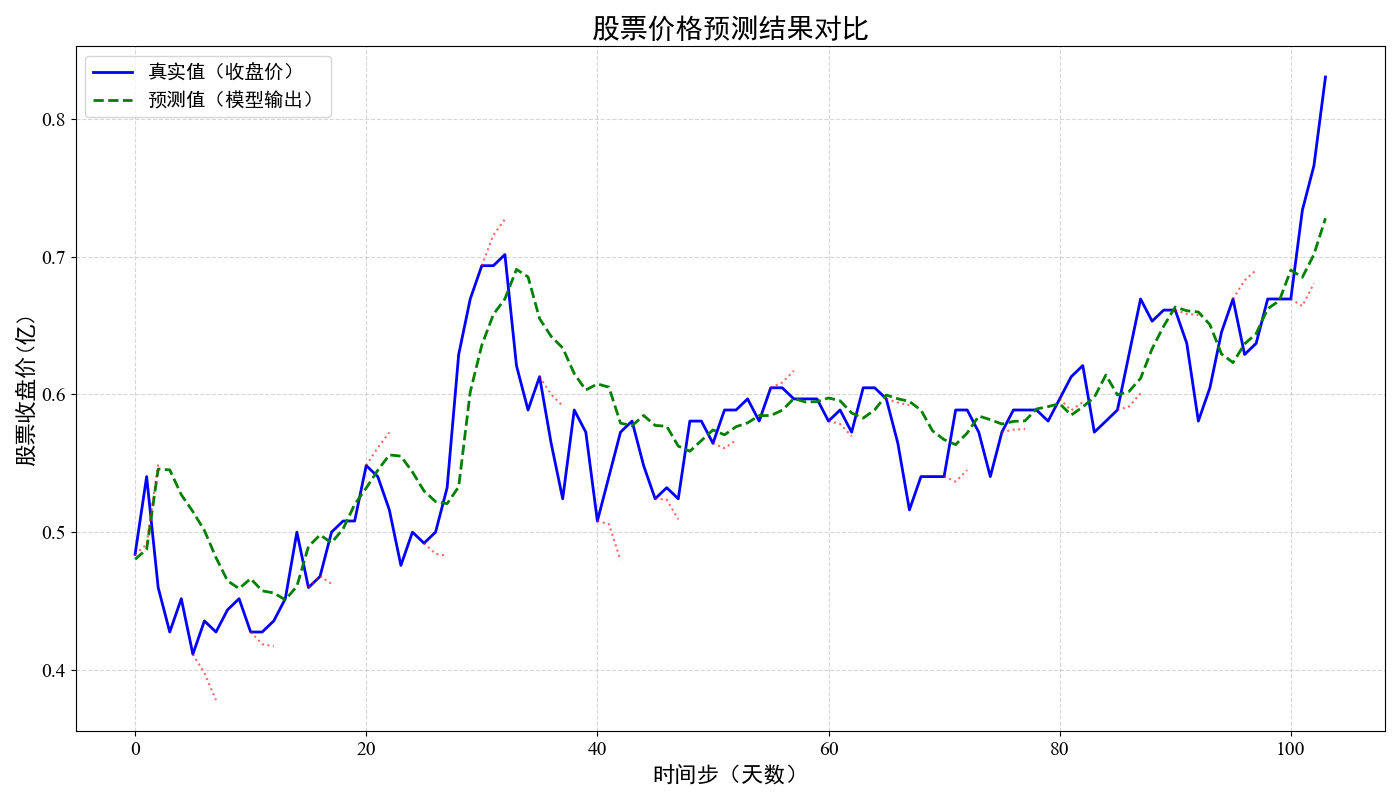
PyTorch LSTM练习案例:股票成交量趋势预测
文章目录 案例介绍源码地址代码实现导入相关库数据获取和处理搭建LSTM模型训练模型测试模型绘制折线图主函数 绘制结果 案例介绍 本例使用长短期记忆网络模型对上海证券交易所工商银行的股票成交量做一个趋势预测,这样可以更好地掌握股票买卖点,从而提高…...

CK3588下安装linuxdeployqt qt6 arm64
参考资料: Linux —— linuxdeployqt源码编译与打包(含出错解决) linux cp指令报错:cp: -r not specified; cp: omitting directory ‘xxx‘(需要加-r递归拷贝) CMake Error at /usr/lib/x86_64…...
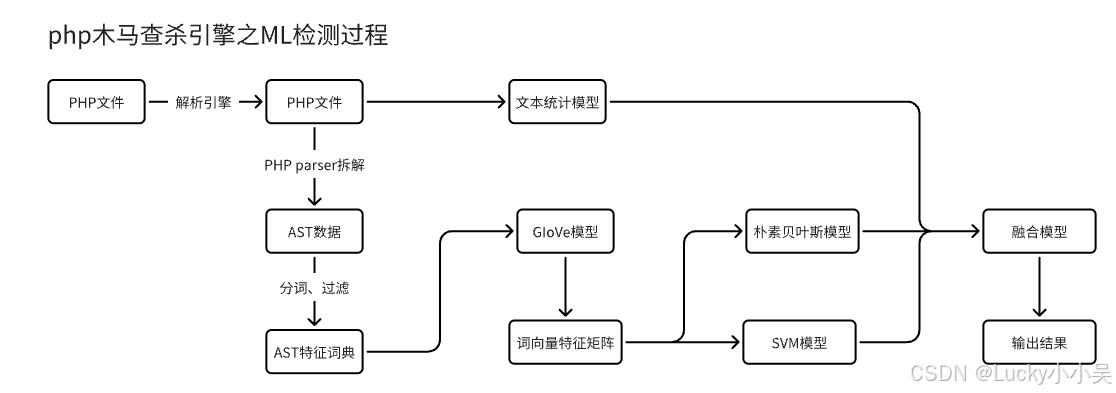
木马查杀引擎—关键流程图
记录下近日研究的木马查杀引擎,将关键的实现流程图画下来 PHP AST通道实现 木马查杀调用逻辑 模型训练流程...

二程运输的干散货船路径优化
在二程运输中,干散货船需要将货物从一个港口运输到多个不同的目的地港口。路径优化的目标是在满足货物运输需求、船舶航行限制等条件下,确定船舶的最佳航行路线,以最小化运输成本、运输时间或其他相关的优化目标。 影响因素 港口布局与距离:各个港口之间的地理位置和距离…...

华为数字政府与数字城市售前高级专家认证介绍
华为数字政府与数字城市售前高级专家认证面向华为合作伙伴售前高级解决方案专家、华为数字政府与数字城市行业解决方案经理(VSE)。 通过认证验证的能力 您将了解数字政府、数字城市行业基础知识,了解该领域内的重点场景;将对华…...

在VSCode中接入DeepSeek的指南
本文将介绍三种主流接入方式,涵盖本地模型调用和云端API接入方案。 一、环境准备 1.1 基础要求 VSCode 1.80+Node.js 16.x+Python 3.8+(本地部署场景)已部署的DeepSeek服务(本地或云端)1.2 安装必备插件 # 打开VSCode插件面板(Ctrl+Shift+X) 搜索并安装: - DeepSeek Of…...
【docker】--容器管理
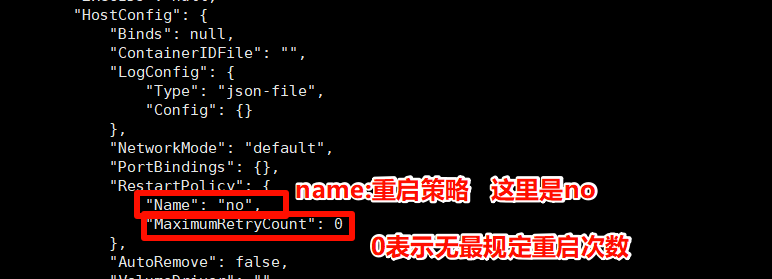
文章目录 容器重启--restart 参数选项及作用**对比 always 和 unless-stopped****如何查看容器的重启策略?** 容器重启 –restart 参数选项及作用 重启策略 no:不重启(默认)。on-failure:失败时重启(可限…...

基于OpenCV的人脸微笑检测实现
文章目录 引言一、技术原理二、代码实现2.1 关键代码解析2.1.1 模型加载2.1.2 图像翻转2.1.3 人脸检测 微笑检测 2.2 显示效果 三、参数调优建议四、总结 引言 在计算机视觉领域,人脸检测和表情识别一直是热门的研究方向。今天我将分享一个使用Python和OpenCV实现…...

使用PEFT库将原始模型与LoRA权重合并
使用PEFT库将原始模型与LoRA权重合并 步骤如下: 基础模型加载:需保持与LoRA训练时相同的模型配置merge_and_unload():该方法会执行权重合并并移除LoRA层保存格式:合并后的模型保存为标准HuggingFace格式,可直接用于推…...
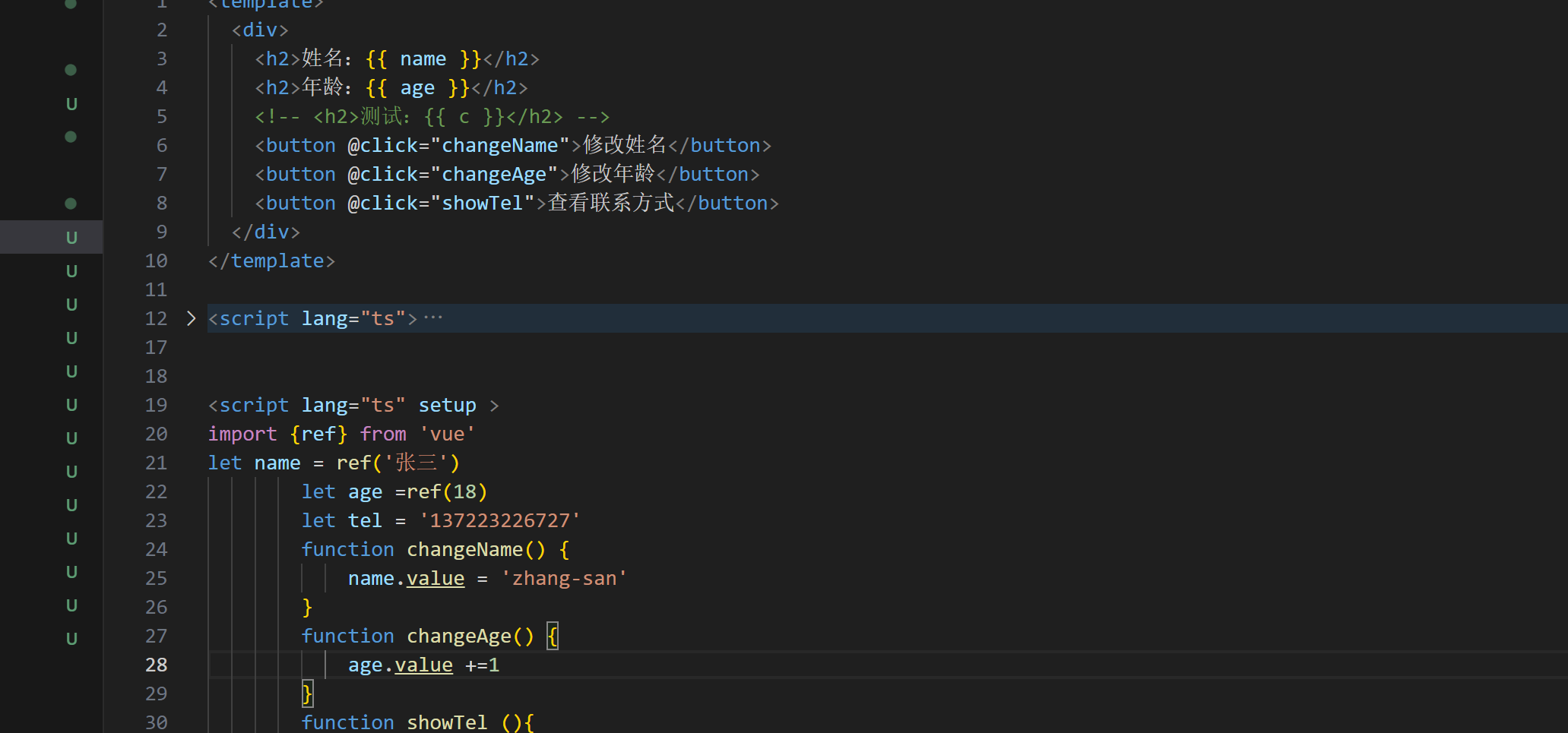
2025-5-15Vue3快速上手
1、setup和选项式API之间的关系 (1)vue2中的data,methods可以与vue3的setup共存 (2)vue2中的data可以用this读取setup中的数据,但是反过来不行,因为setup中的this是undefined (3)不建议vue2和vue3的语法混用…...
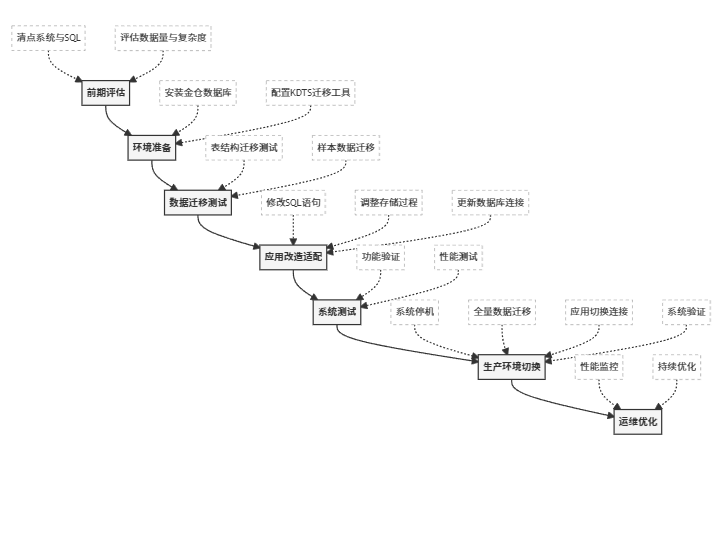
【金仓数据库征文】从生产车间到数据中枢:金仓数据库助力MES系统国产化升级之路
目录 前言一、金仓数据库:国产数据库的中坚力量二、制造业MES系统:数据驱动的生产智能MES系统的核心价值MES系统关键模块与数据库的关系1. BOM管理2. 生产工单与订单管理3. 生产排产与资源调度4. 生产报工与实时数据采集 5. 采购与销售管理 三、从MySQL到…...

HTML17:表单初级验证
表单初级验证 常用方式 placeholder 提示信息 <p>名字:<input type"text" name"username" maxlength"8" size"30" placeholder"请输入用户名"></p>required 非空判断 <p>名字:<input type"…...
从卡顿到丝滑:JavaScript性能优化实战秘籍
引言 在当今的 Web 开发领域,JavaScript 作为前端开发的核心语言,其性能表现对网页的加载速度、交互响应以及用户体验有着举足轻重的影响。随着 Web 应用的复杂度不断攀升,功能日益丰富,用户对于网页性能的期望也越来越高。从电商…...

How Sam‘s Club nudge customers into buying more
Here’s how Sam’s Club (or similar warehouse memberships) nudge customers into buying more: It’s a classic psychological strategy rooted in sunk cost fallacy and loss aversion. 1. Prepaid Membership Creates a “Sunk Cost” Once you’ve paid the annual …...

ORB特征点检测算法
角点是图像中灰度变化在两个方向上都比较剧烈的点。与边缘(只有一个方向变化剧烈)或平坦区域(灰度变化很小)不同,角点具有方向性和稳定性。 tips:像素梯度计算 ORB算法流程简述 1.关键点检测(使用FAST…...
快速通关单链表秘籍
1.单链表概念与结构 1.1 概念 链表是一种逻辑结构连续,物理结构不连续的存储结构,数据结构的逻辑顺序是通过链表中的指针链接次序实现。 光看定义有点不好理解,我们举个简单例子! 我们都看过火车吧,我们看到的火车…...