大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机是低空行业无人机最具性价比的产品,尤其是大疆机场3的推出,以及持续自身产品升级迭代,包括司空2、大疆智图以及大疆智运等专业软件和各种功能强大的挂载及大疆生态合作伙伴的加持,构筑了围绕大疆无人机从空中检查到空中测绘等行业应用解决方案。
“大疆能提供完整的低空无人机巡检解决方案,满足了行业用户的普遍需求,具备很强的通用性特点。大疆方案缺少行业本身的特殊性,需要集成商结合行业用户的场景特点,提供具备行业特色的无人机巡检解决方案”
大疆无人机系统架构也有几点局限性:
1:无人机无线通信架构的局限性
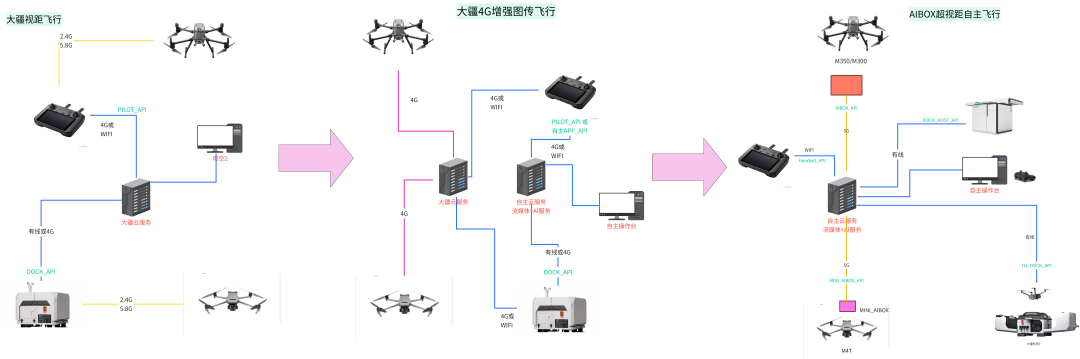
大疆无人机的无线通信采用2.4/5.8G的点到点通信方式,实现无人机到遥控器或者机场的C2+实时视频流的无线通讯。
C2:Command and Control (指挥和控制);C4:Command 、Control、Communication、Computer(指挥、控制、通讯、计算)
大疆无人机包括两个系列:消费级和行业级。
消费级主要面对个人用户,以飞手手控为主,无需考虑无人机人工智能的需求。无人机和遥控器绑定的点到点的无线通信,已经满足用户需要,超视距飞行基本不需要。
行业机应用就不同了,需要超远距离、超长时间,还有复杂环境飞行的要求。另外,从管理需求出发,除了现场以外还需要远程飞行监控要求。类似消费级的点到点的无线通信架构已经没有办法满足应用需求。
-
大疆视距飞行
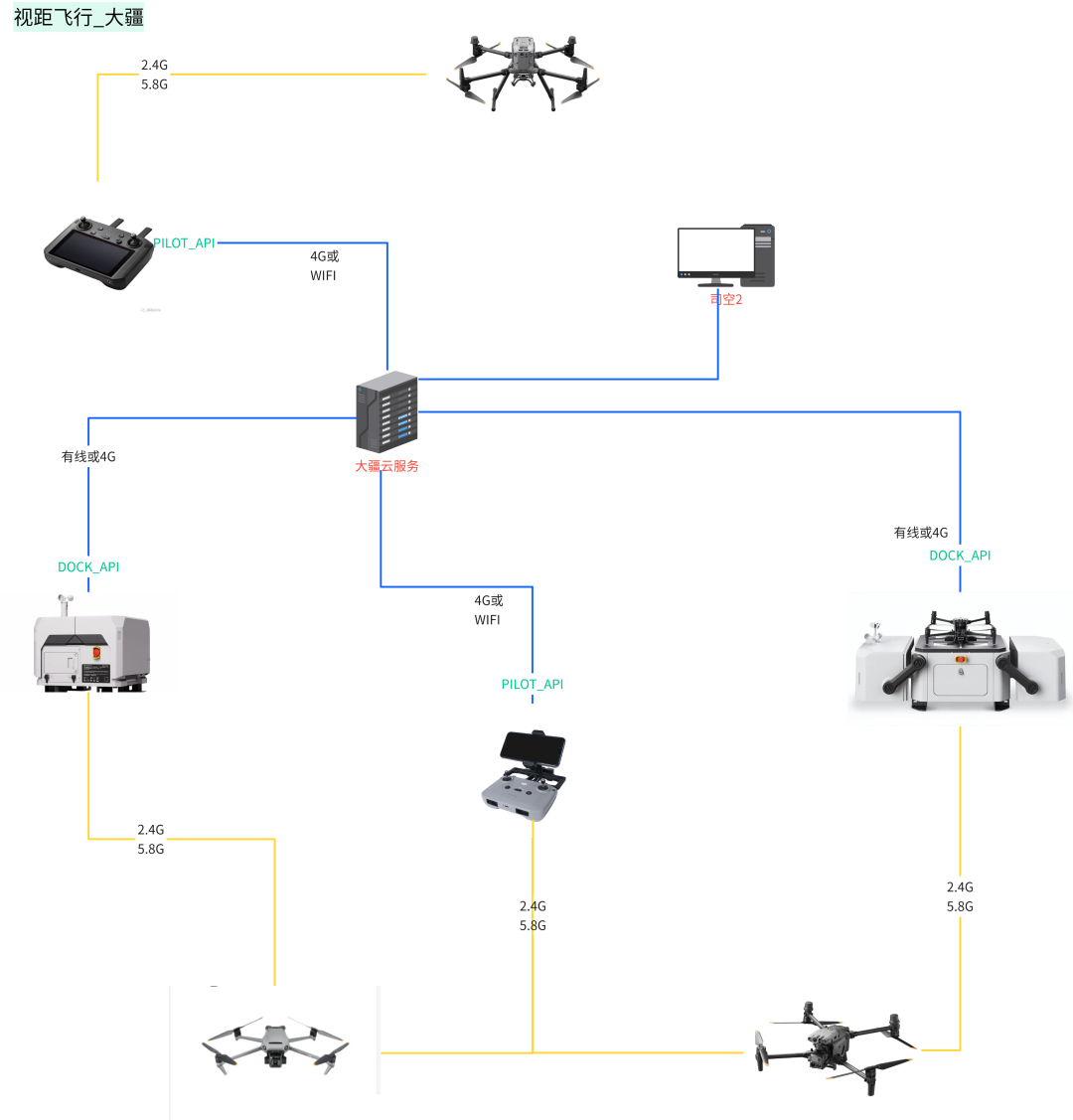
这种点到点的无线通信设计实现了视距条件下远距离无线数据通信(超过20-30公里)。但是很多行业应用情况,无人机没有办法保证视距飞行,比如城市低空安防,无论是高架巡检、违停执法还是突发空中执法,很多情况都是超视距飞行;隧道环境中飞行,这种点到点的无线通信也不理想;工业环境中大的金属物体的遮挡也可能导致点到点的无线通信无法正常工作。
点到点无线通信失效的一个重要后果就是导致无人机飞行控制失效。另外一个重要后果是当无人机基于RTK飞行的情况,无人机通过和遥控器的点到点无线通信链路获取差分数据信息。点到点无线链路失效也将导致RTK失效。
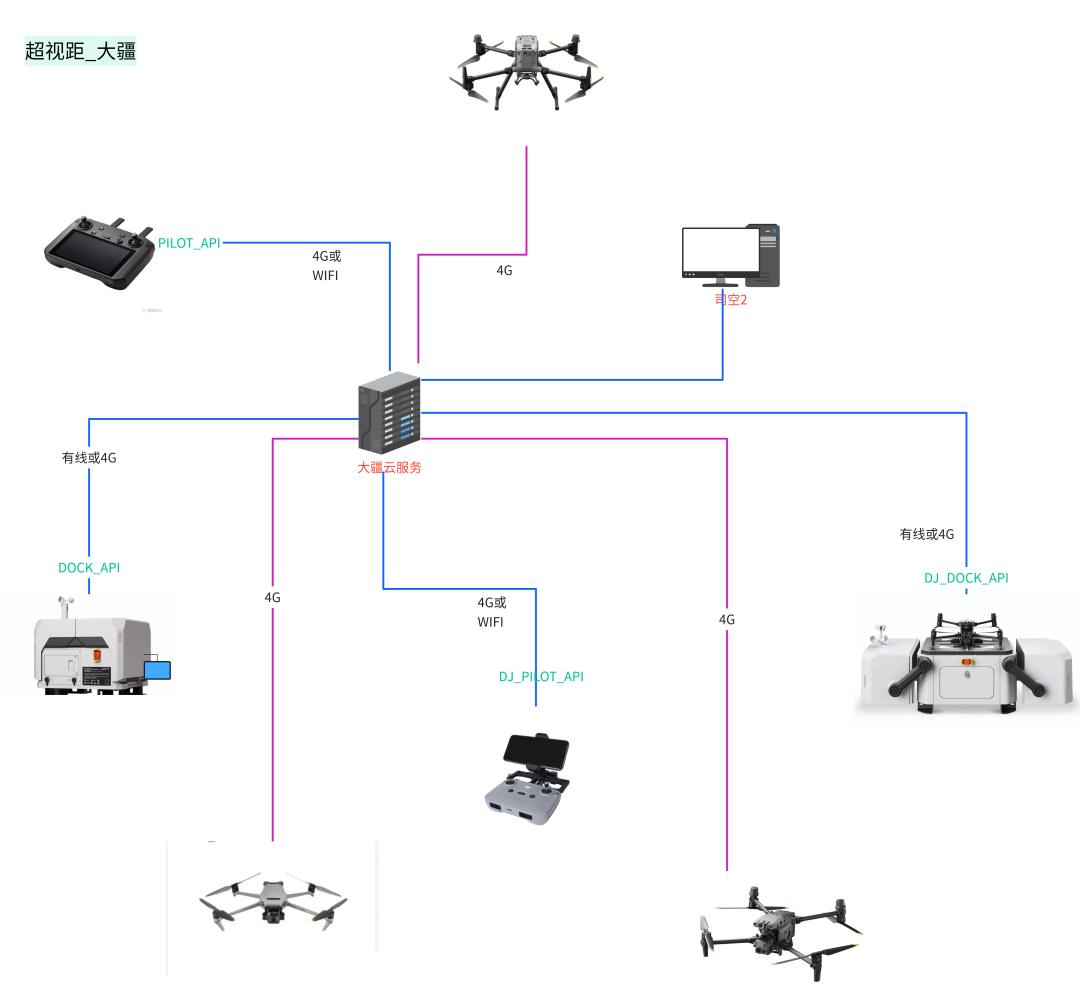
4G增强图传模块也解决不了全部问题

尽管大疆提供了4G增强图传模块,但是模块只提供的实时视频流和部分C2功能,满足不了行业用户的完整超视距自主飞行的要求。
基于大疆MSDK开发APP,利用遥控器或者机场上云API的解决方案,只实现了远程控制无人机的功能,但是依旧没有摆脱大疆无人机到遥控器或者机场的点到点的无线通信架构,依然没有办法解决超视距和复杂环境的自主飞行。
“大疆无人机的无线通讯技术确实已很好的满足了消费级客户需求,当时对于行业客户无论从应用还是管理角度都有不足”
大疆无人机和遥控器或者机场绑定的使用方式实际行业应用叶会带来很多局限性:比如一个遥控器无法控制多架无人机的编队飞行、也不支持一机多巢或者多机多巢等等。
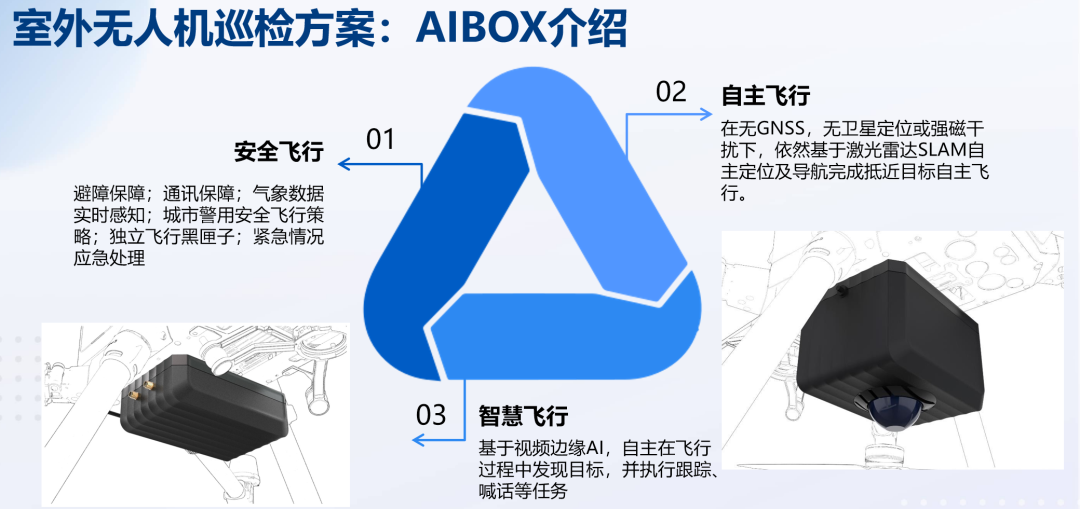
增加方案-AIBOX
-
基于AIBOX的视距及超视距飞行
1:基于机载AIBOX的PSDK开发,具备了完整独立C2及C4的能力,以及实时视频流低延时的无线传输是行业无人机应用的技术趋势。
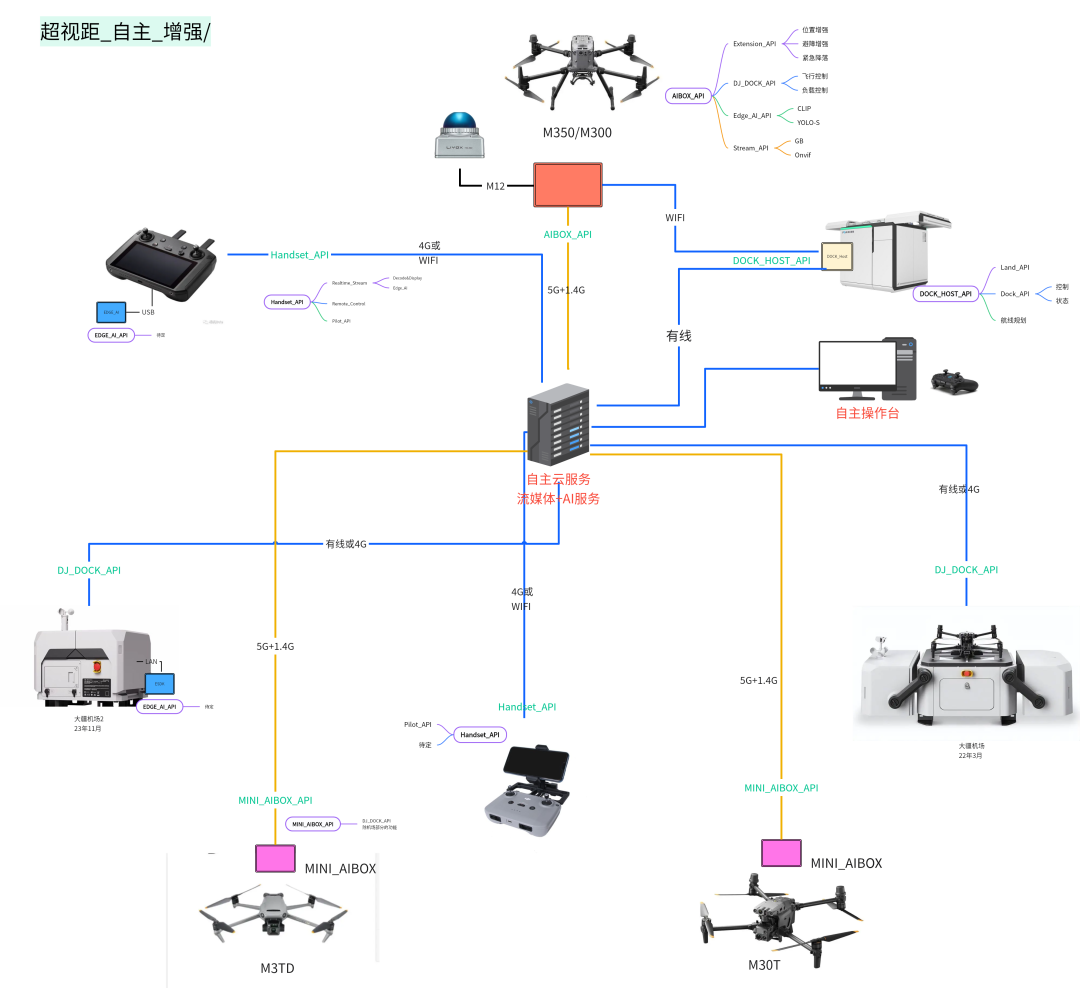
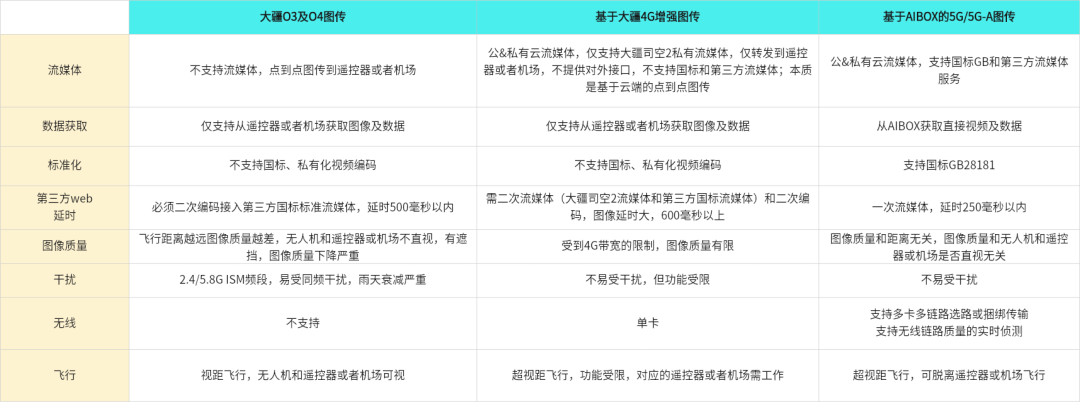
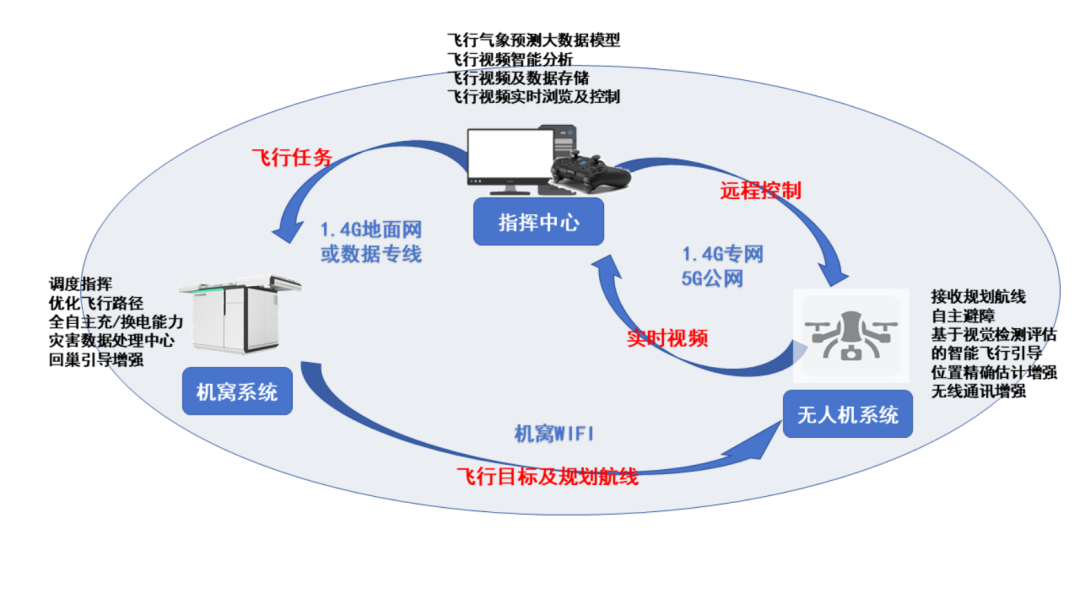
基于大疆行业无人机的特色解决方案-无线通信篇:基于蜂窝以及自组网MESH的无线通信C2链路
2:具身智能
目前大疆的无人机除了M4以外,其他机型并不具备具身智能的能力。目前大疆的无人机只是高性价比的通用飞行器,还不能称之为具备具身智能的人工智能的无人机。
“关于这一点其实也很好理解,具身智能的智能体一定是在特定的场景和需求背景的自主人工智能,需要用户定制开发”
无人机的具身智能技术核心在于通过无人机机体与环境的深度交互,构建感知、决策与行动一体化的闭环智能系统。这一技术突破打破了传统无人机依赖预设指令或远程操控的局限性,使无人机能够像生物机体一样,通过物理形态的动态调整与环境实时互动,实现自主适应复杂场景的能力。简单来说,就是让无人机实现更“智慧”的飞行。
L4级自主飞行系统指能够在无卫星信号、强电磁干扰环境下实现自主避障和飞行,且飞行任务过程无需高精地图或预建模。采用边缘计算架构,将决策逻辑下沉至无人机端,实现 “感知 - 决策 - 行动” 的毫秒级闭环。L4级自主飞行系统要求无人机在感知层、决策层、执行层、通信层等多方位技术创新突破。

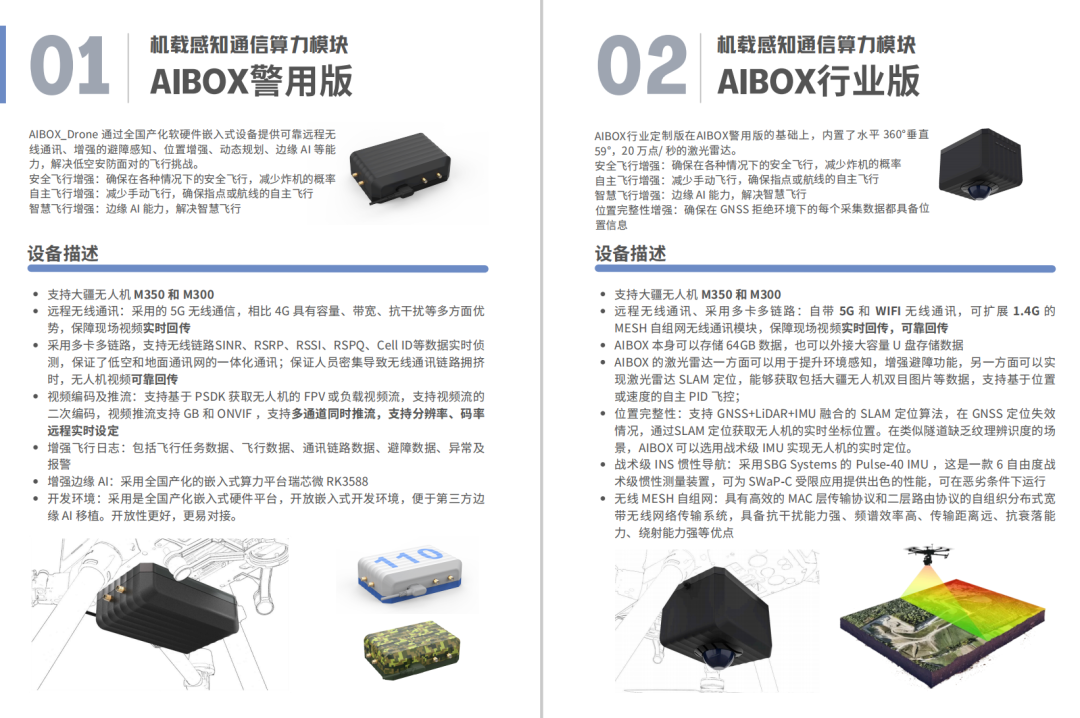
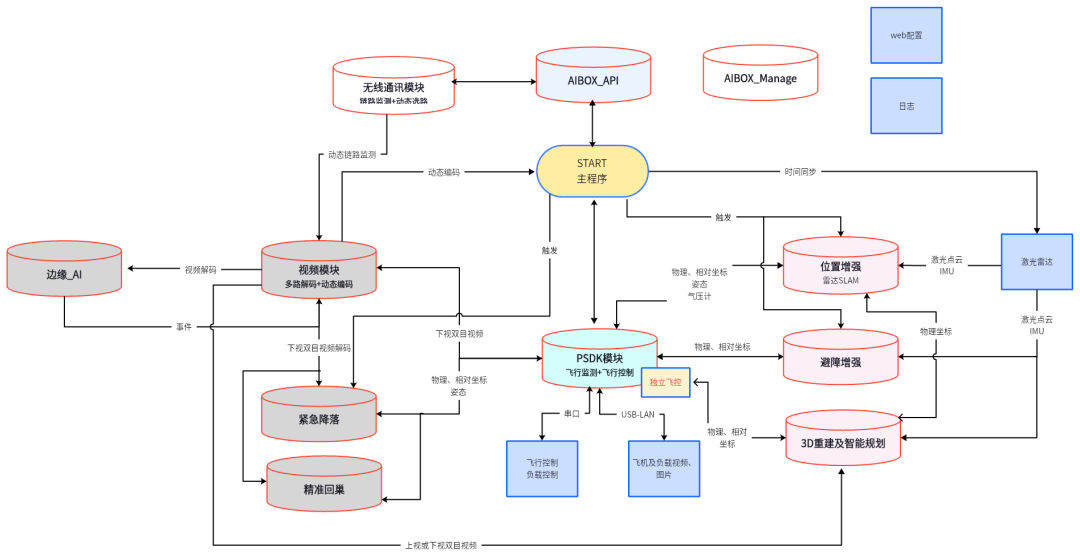
“AIBOX采用全国产化的算力平台,提供了32T的边缘算力能力,支持YOLO甚至CLIP视频大模型边缘AI的部署。
AIBOX整合了大疆无人机的飞行控制以及自主的PID自主飞控”
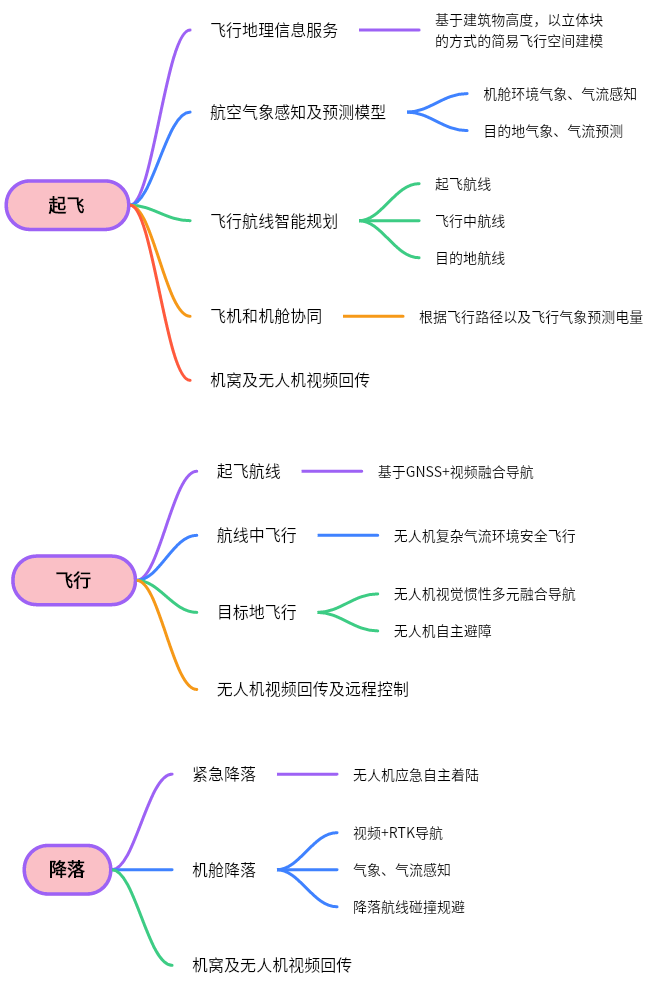
智能无人机赋能巡检场景,突破传统作业边界
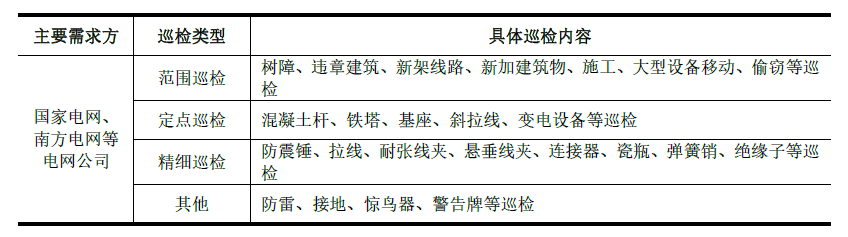
无人机电网巡检的主要应用场景如下:
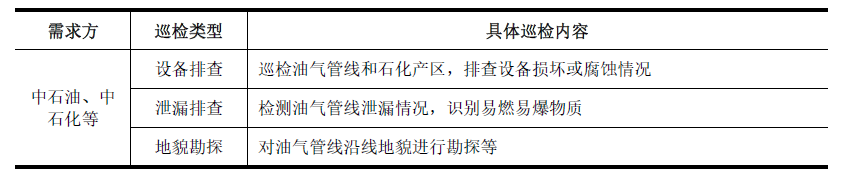
无人机油气管线巡检的主要应用场景如下:
人工智能的无人机首先要求无人机本身具备处理神经网络算法的算力能力,同时也结合应用场景定制边缘AI算法。
通过人工智能无人机实现高效的飞行任务。从大疆M4,我们已经看到这种无人机发展趋势,大疆也设计算法框架,鼓励生态合作伙伴定制开发边缘AI算法。当然这种边缘AI算法往往和无人机的飞行紧密结合,实现完整的飞行逻辑。
3:位置服务局限性
准确的位姿是无人机或者机械狗稳定运动的重要保障。大疆无人机的位置数据是通过GNSS和RTK获取的。在GNSS拒绝环境以及室内环境,大疆无人机没有办法获取位置数据,只能采取手动飞行。
室外高精度位置一般基于RTK获取,大疆无人机支持采用千寻的RTK差分基站,购机的费用包含了一年的RTK费用,后续需要购买服务。对于行业无人机的空中航线巡检,启用RTK是必须的。所以不同于M3,从大疆最新的M4机型来看,RTK已经是必配的模块,当然消费机没有这么苛刻的要求。
大疆RTK有个使用局限性:RTK的差分信息是通过遥控器或者机场和无人机的点到点的无线通信发送给无人机的,这种通信方式在一些场合并十分可靠。
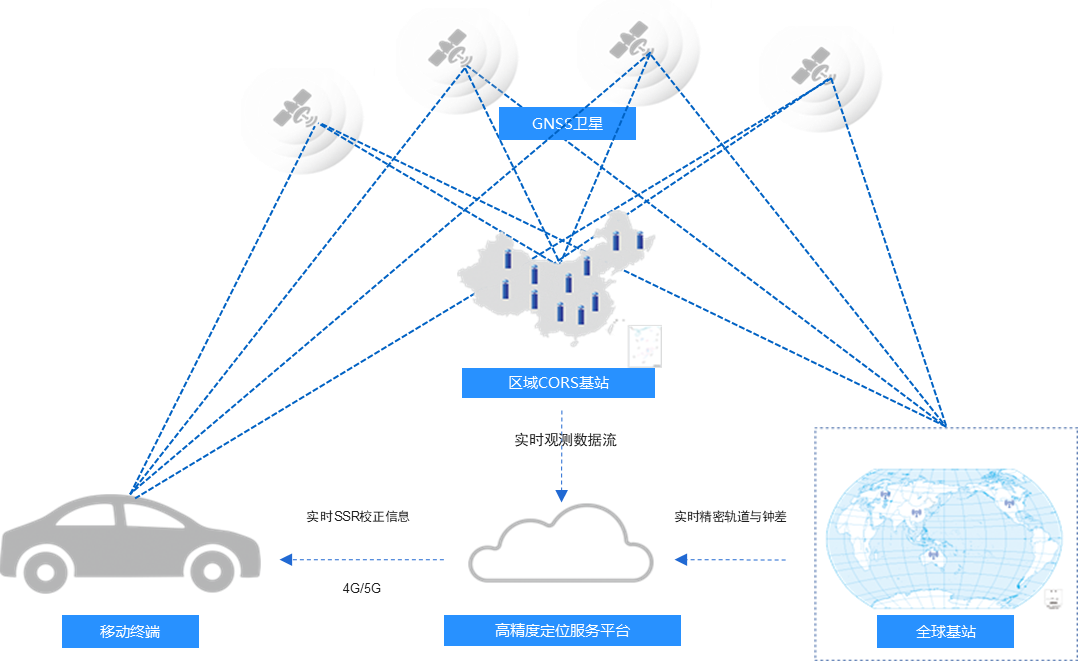
大疆的D-RTK2的自主差分基站实高精度的地基RTK定位,从D-RTK3起,同时支持星基RTK定位。RTK定位的原理是RTK模块和差分基站需要至少共6颗GNSS卫星。由于无人机是高空飞行,采用星基似乎可靠性更高些的。
在室外RTK无法收敛的环境,就需要其他定位技术来保证无人机可以得到高精度的位置信息。类似多源融合的SLAM定位或者协作定位的技术,用于解决这些场景的位置服务问题。
大疆所有系列的无人机都仅仅支持RTK的飞行,在RTK无法收敛或者GNSS拒绝的环境,目前大疆还不支持这种场景的自主飞行,只能依靠飞手手动飞行。这对于很多行业应用客户而言是没有办法接受的。
室外的姿态信息一般会基于IMU和陀螺仪获得,这在强磁的环境会失效。对于M350的中型无人机,可以通过双RTK更加可靠的获得,且不受强磁环境影响。但是其他包括最新的M4机型就没有办法解决这个问题。
此类问题也是类似宇树机械狗面临的同样问题,考虑到机械狗地面运动,RTK以及陀螺仪受到的影响会更大。
大疆无人机完全不支持室内的位姿服务,因此目前大疆无人机的所有系列都不支持室内自主飞行。
对于室内环境,RTK是完全不可用的,陀螺仪也基本没有保证的。目前大疆的所有系列无人机在室内只能是飞手的手动飞行。这对于行业应用而言是无法接受的。
室内无人机自主飞行比较成熟的技术路线是:首先对于飞行控制实现高精度的激光雷达3D点云建模;其次是将已建立的点云存储在无人机上;无人机在飞行中基于LIO里程计和3D点云比对,实现3D空间的高精度定位。另外一种方案就是在室内建立高精度的3D定位系统,协作无人机的高精度位姿服务。
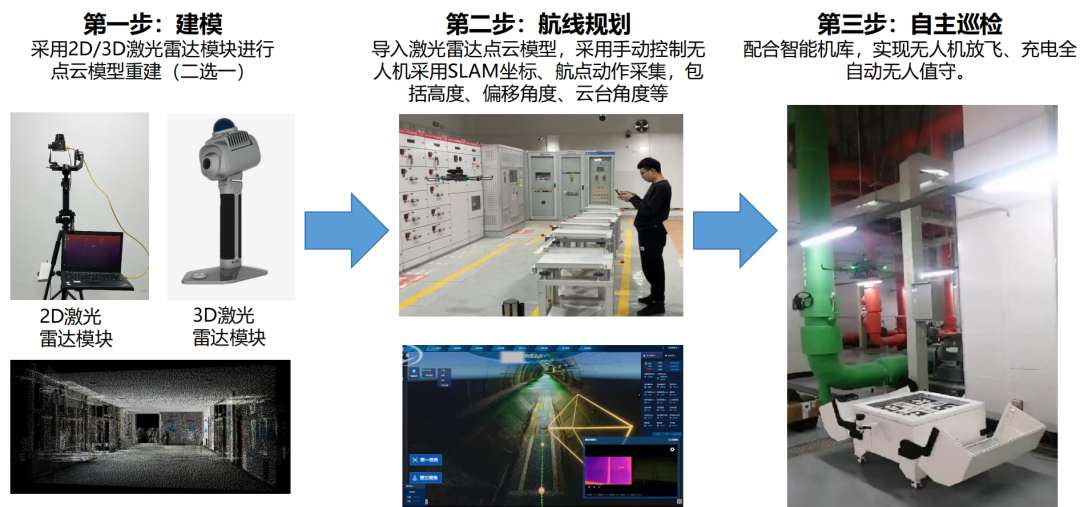
但是两种方案都是已知环境的飞行,需要对环境测绘或者部署定位设备,似乎都不太友好。另外由于基于激光雷达的方案需要加载激光雷达,会导致本来室内小型无人机飞行时间大大缩短,执行效率降低。目前还没有特别完美的室内无人机自主飞行的方案。
4:专业机载数据采集设备
尽管大疆在可见光以及激光雷达相关的挂载已经很齐全了,但是涉及类似工业设备的超声波、磁力仪等专业传感设备依然缺失。如何快速的将现有成熟专业的传感采集设备集成到无人机平台,也是一个重要的行业应用需要。
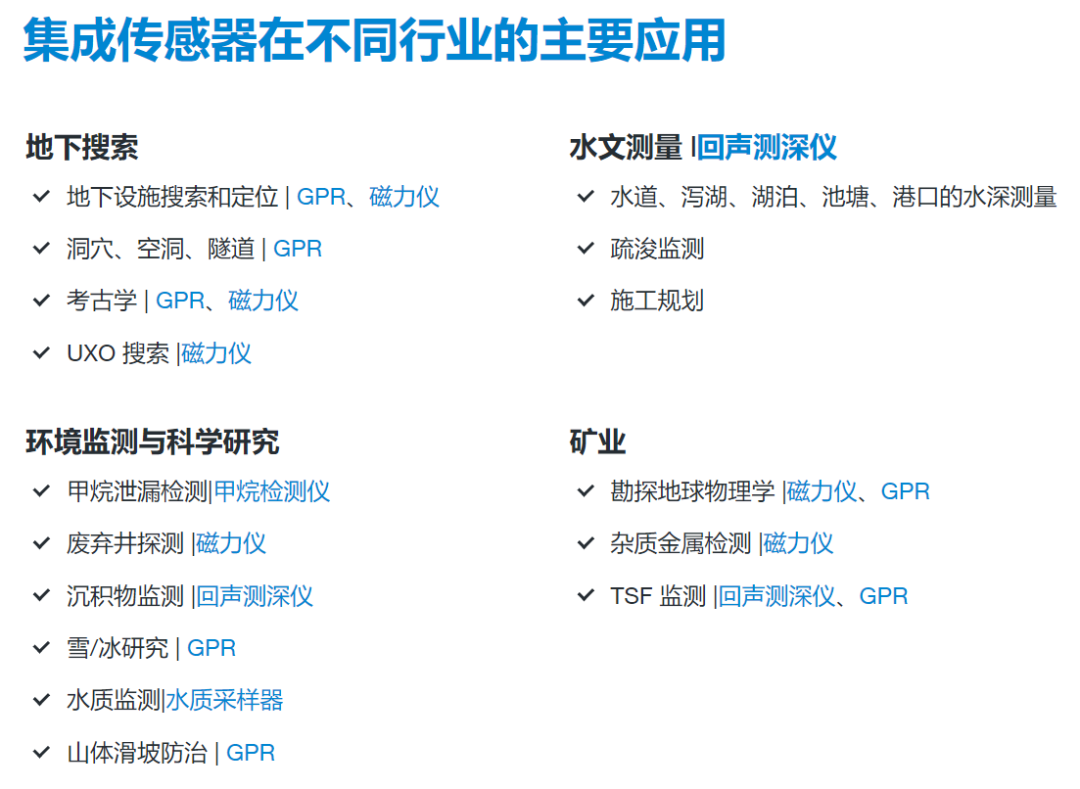

“AIBOX提供了独立对外供电以及LAN、USB接口,方便集成传感采集设备”

5:复杂环境飞行不支持
从成本和普遍性设计考虑,大疆无人机并没有特别考虑在复杂环境的飞行面对的飞行安全以及位姿数据的问题,需要用户在大疆无人机基础上增强和提升。
比如避障功能及策略:
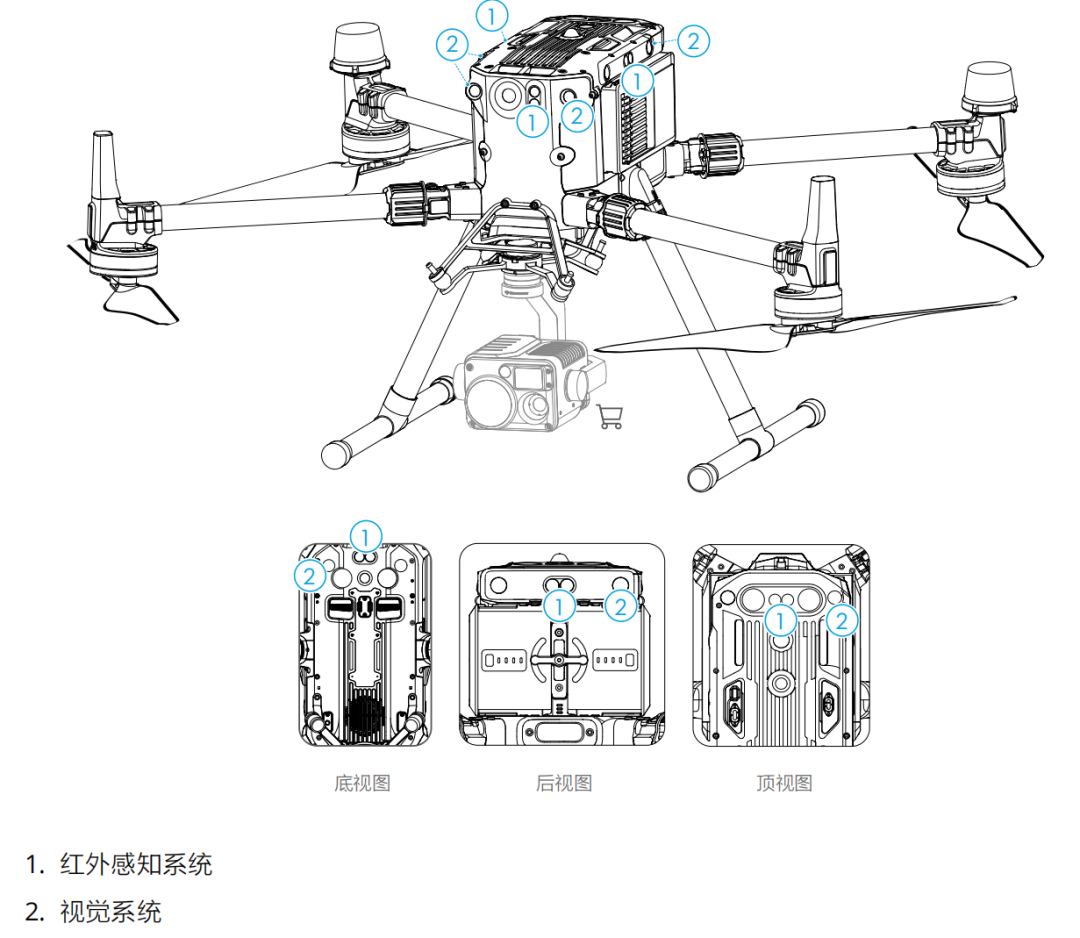
M350 RTK配备六向视觉系统和六向红外传感系统,为飞机提供定位和环境传感功能。视觉系统通过视觉图像感测障碍物并测量距离,以获得有关飞机的位置信息。它们位于飞机机身的前部、后部、左侧、右侧、顶部和底部,每个都由两个摄像头组成。红外传感系统可以通过红外测距判断障碍物的距离,还可以提供飞机的地面高度参考,并通过视觉系统的视觉计算飞机的位置信息。
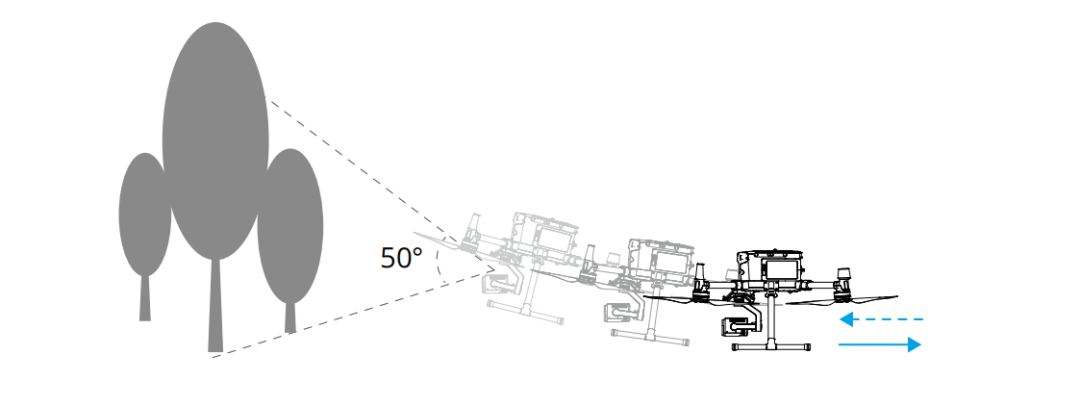
视觉避障功能适用于良好的照明环境,飞行路线中遇到的前方障碍物不应特别稀疏。此外,由于惯性关系,有必要将飞机的制动控制在有效距离内。
红外传感系统使用场景红外传感系统适用于漫反射、大尺寸、高反射率障碍物的环境。
视觉系统的测量精度容易受到光照强度和表面纹理的影响;因此,应谨慎使用以下场景:
-
纯色表面(如纯黑色、纯白色、纯红色、纯绿色)和弱纹理场景。
-
具有强烈反射或反射的表面。
-
水面或透明物体表面。
-
移动物体的表面(如上方人流、上方芦苇、灌木、草丛等被风移动的移动物体)。
-
剧烈快速变化的场景和直接光源的场景。
-
在特别暗(小于15勒克斯)或特别亮(大于10000勒克斯)的表面上。
-
飞机的速度不应太快,例如在离地面1米、离地面2米处飞行速度不能超过5米/秒
红外传感系统必须用于漫反射、大尺寸和高反射率障碍物的环境中。
红外测距传感器在以下情况下可能无法提供准确的距离:
-
对光有强烈吸收的材料表面(如哑光纯黑色物体)。
-
15米外有一大片强反射场景(例如并排放置的多个交通标志)。
-
小障碍。
-
镜子或透明物体(如镜子、水和玻璃)。
“大疆也认识到自身无人机避障能力的局限性,在今年最新的机型M4,就同步推出了激光雷达+毫米波雷达的避障模块;另外在今年最新的农业植保机T100也配置了激光雷达+毫米波雷达的避障模块;行业机搭载激光雷达+毫米波雷达实现避障增强应该的行业无人机的趋势”
AIBOX本身集成了一款360°的全向激光雷达

7:机场以及编队飞行
大疆目前还提供支持M350的多旋翼无人机的机场,需要第三方机场配合使用。另外,大疆解决方案不支持多机多巢以及多机的编队飞行。

8:机型的局限性
比如无人机的物理尺寸、载重以及飞行时间
很多适合无人机任务执行的环境复杂,期望尺寸相对小(M350有些大)、另外结合环境(可能需要补光)以及任务目标,需要搭载不同的挂载设备(比如一些气体或者雷达探测设备),对于无人机的载重有些要求。此外复杂环境的飞行往往是超视距飞行的,无线通信是个挑战。此外飞行时间也是个不小的问题,除去往返飞行的时间,十几分钟的飞行根本没有办法达到执行任务的目的。

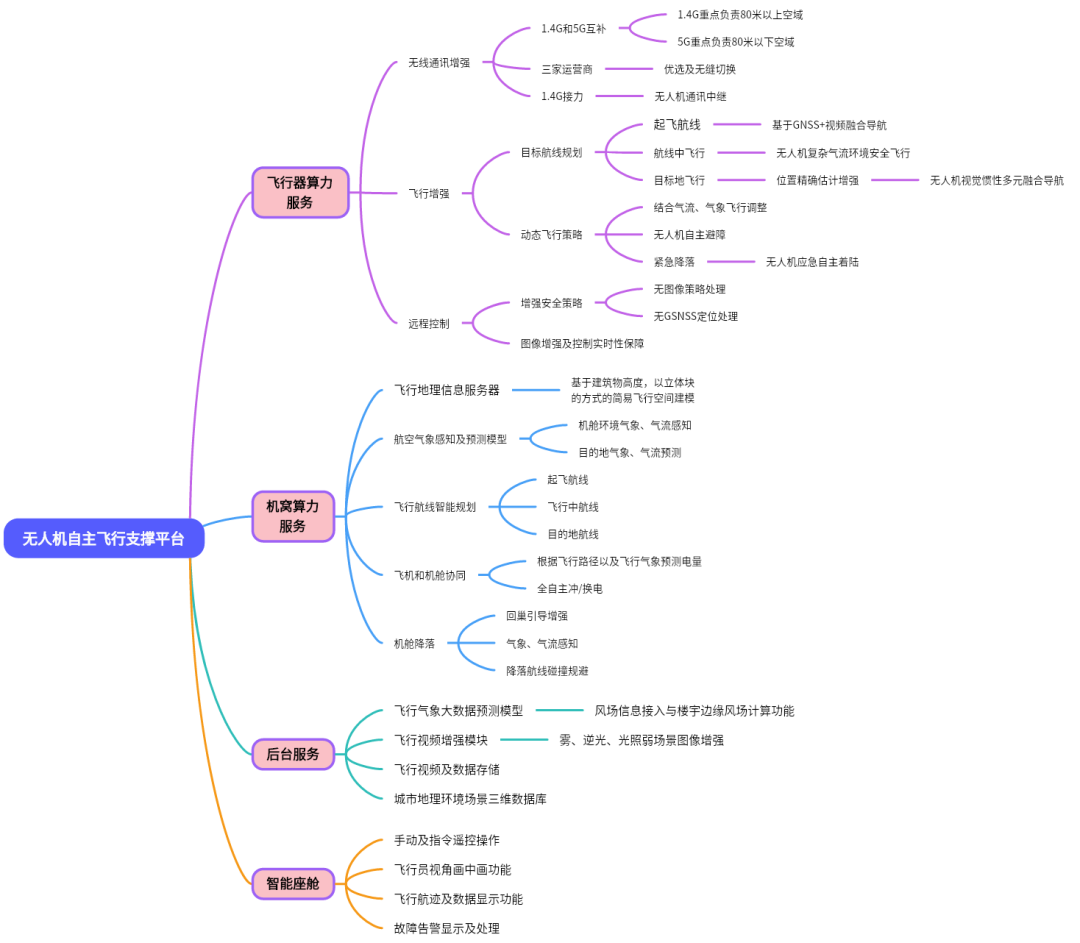
总而言之,大疆无人机解决方案已经满足大多数的场景需求,在针对行业用户的需要,需要通过AIBOX、机场、平台,增强解决方案,提供用户行业特色的无人机自主巡检解决方案。
相关文章:
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案 大疆无人机是低空行业无人机最具性价比的产品,尤其是大疆机场3的推出,以及持续自身产品升级迭代,包括司空2、大疆智图以及大疆智运等专业软件和…...

医学影像系统性能优化与调试技术:深度剖析与实践指南
🧑 博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C, C#, Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C、C#等开发语言,熟悉Java常用开…...
day 25
*被遗忘的一集 程序:二进制文件,文件存储在磁盘中,例如/usr/bin/目录下 进程:进程是已启动的可执行程序的运行实例。 *进程和程序并不是一一对应的关系,相同的程序运行在不同的数据集上就是不同的进程 *进程还具有并…...
吉客云数据集成到金蝶云星空的最佳实践
吉客云数据集成到金蝶云星空的技术案例分享 在本次技术案例中,我们将探讨如何通过仓库方案-I0132,将吉客云的数据高效集成到金蝶云星空。此方案旨在解决企业在数据对接过程中遇到的多种技术挑战,包括数据吞吐量、实时监控、异常处理和数据格…...

【Spark】-- DAG 和宽窄依赖的核心
目录 Spark DAG 和宽窄依赖的核心 一、什么是 DAG? 示例:WordCount 程序的 DAG 二、宽依赖与窄依赖 1. 窄依赖 2. 宽依赖 三、DAG 与宽窄依赖的性能优化 1. 减少 Shuffle 操作 2. 合理划分 Stage 3. 使用缓存机制 四、实际案例分析:同行车判断 五、总结 Spark D…...

原生的 XMLHttpRequest 和基于 jQuery 的 $.ajax 方法的异同之处以及使用场景
近期参与一个项目的开发,发现项目中的ajax请求有两种不同的写法,查询了下两种写法的异同之处以及使用场景。 下面将从以下两段简单代码进行异同之处的分析及使用场景的介绍: // 写法一: var xhr new XMLHttpRequest(); xhr.open…...

快速选择算法:优化大数据中的 Top-K 问题
在处理海量数据时,经常会遇到这样的需求:找出数据中最大的前 K 个数,而不必对整个数据集进行排序。这种场景下,快速选择算法(Quickselect)就成了一个非常高效的解决方案。本文将通过一个 C 实现的快速选择算…...

使用Frp搭建内网穿透,外网也可以访问本地电脑。
一、准备 1、服务器:需要一台外网可以访问的服务器,不在乎配置,宽带好就行。我用的是linux服务器。(一般买一个1核1g的云服务器就行),因为配置高的服务器贵,所以这是个择中办法。 2、客户端&a…...

【RabbitMQ】消息丢失问题排查与解决
RabbitMQ 消息丢失是一个常见的问题,可能发生在消息的生产、传输、消费或 Broker 端等多个环节。消息丢失的常见原因及对应的解决方案: 一、消息丢失的常见原因 1. 生产端(Producer)原因 (1) 消息未持久化 原因:生产…...

电子电路:被动电子元件都有哪些?
在电子电路中,被动元件(Passive Components)是指不需要外部电源即可工作且不具备信号放大或能量控制能力的元件。它们主要通过消耗、存储或传递能量来调节电路的电流、电压、频率等特性。以下是常见的被动元件及其核心作用: 一、基础被动元件 1. 电阻(Resistor) 功能:限…...
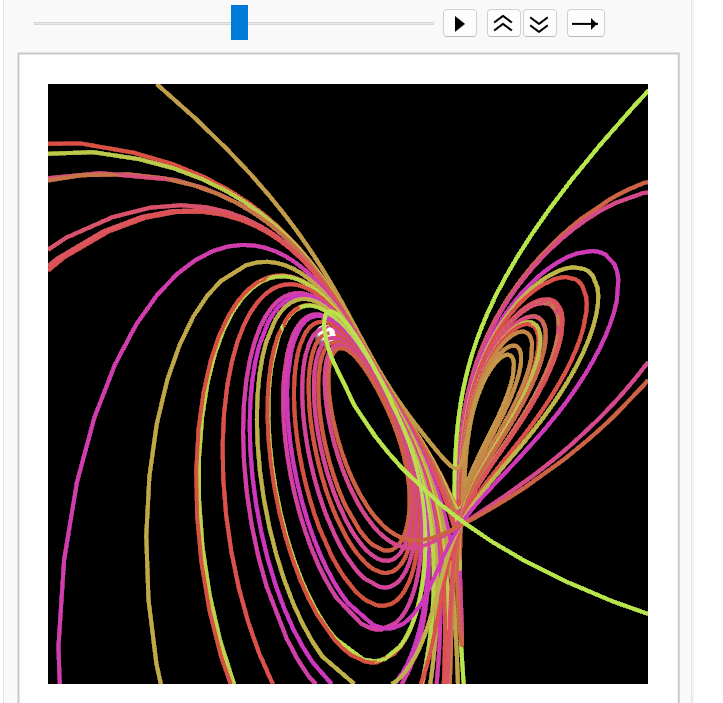
使用Mathematica制作Lorenz吸引子的轨道追踪视频
Lorenz奇异吸引子是混沌理论中最早被发现和研究的吸引子之一,它由Edward Lorenz在1963年研究确定性非周期流时提出。Lorenz吸引子以其独特的"蝴蝶"形状而闻名,是混沌系统和非线性动力学的经典例子。 L NDSolveValue[{x[t] -3 (x[t] - y[t]),…...

深入解析VPN技术原理:安全网络的护航者
在当今信息化迅速发展的时代,虚拟私人网络(VPN)技术成为了我们在互联网时代保护隐私和数据安全的重要工具。VPN通过为用户与网络之间建立一条加密的安全通道,确保了通讯的私密性与完整性。本文将深入解析VPN的技术原理、工作机制以…...
:前端框架性能优化深度解析)
JavaScript性能优化实战(10):前端框架性能优化深度解析
引言 React、Vue、Angular等框架虽然提供了强大的抽象和开发效率,但不恰当的使用方式会导致严重的性能问题,针对这些问题,本文将深入探讨前端框架性能优化的核心技术和最佳实践。 React性能优化核心技术 React通过虚拟DOM和高效的渲染机制提供了出色的性能,但当应用规模…...
 VS (LINQ) 性能比拼 ——c#)
(for 循环) VS (LINQ) 性能比拼 ——c#
在大多数情况下,for 循环的原始性能会优于 LINQ,尤其是在处理简单遍历、数据筛选或属性提取等场景时。这是由两者的实现机制和抽象层次决定的。以下是具体分析: 一、for 循环与 LINQ 的性能差异原因 1. 抽象层次与执行机制 for 循环&#…...

《Spring Boot 4.0新特性深度解析》
Spring Boot 4.0的发布标志着Java生态向云原生与开发效能革命的全面迈进。作为企业级应用开发的事实标准框架,此次升级在运行时性能、云原生支持、开发者体验及生态兼容性四大维度实现突破性创新。本文深度解析其核心技术特性,涵盖GraalVM原生镜像支持、…...
的可能原因有哪些?如何从数据或训练层面缓解?)
【大模型面试每日一题】Day 20:大模型出现“幻觉”(Hallucination)的可能原因有哪些?如何从数据或训练层面缓解?
【大模型面试每日一题】Day 20:大模型出现“幻觉”(Hallucination)的可能原因有哪些?如何从数据或训练层面缓解? 📌 题目重现 🌟🌟 面试官:大模型出现“幻觉”…...

简单图像自适应亮度对比度调整
一、背景介绍 继续在刷对比度调整相关算法,偶然间发现了这个简单的亮度/对比度自适应调整算法,做个简单笔记记录。也许后面用得到。 二、自适应亮度调整 1、基本原理 方法来自论文:Adaptive Local Tone Mapping Based on Retinex for High Dynamic Ran…...

CompletableFuture统计任务
ApiOperation(value "首页统计")GetMapping("/statistics")public UnifyResponse<List<BusinessStatisticsVO>> statistics() throws Exception {StatisticsPermissionQuery permissionQuery getPermission();ThreadPoolExecutor executor …...

neo4j框架:ubuntu系统中neo4j安装与使用教程
在使用图数据库的时候,经常需要用到neo4j这一图数据库处理框架。本文详细介绍了neo4j安装使用过程中的问题与解决方法。 一、安装neo4j 在安装好了ubuntu系统、docker仓库和java的前提下 在ubuntu系统命令行依次输入如下命令: # 安装依赖库 sudo apt-…...

ECPF 简介
ECPF(Embedded CPU Function,嵌入式CPU功能)是NVIDIA BlueField DPU特有的一种功能类型,和PF(Physical Function,物理功能)、VF(Virtual Function,虚拟功能)密…...

eSwitch manager 简介
eSwitch manager 的定义和作用 eSwitch manager 通常指的是能够配置和管理 eSwitch(嵌入式交换机)的实体或接口。在 NVIDIA/Mellanox 的网络架构中,Physical Function(PF)在 switchdev 模式下充当 eSwitch manager&am…...
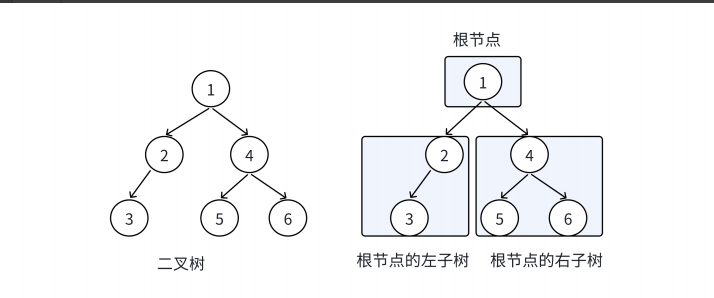
深入理解二叉树:遍历、存储与算法实现
在之前的博客系列中,我们系统地探讨了多种线性表数据结构,包括顺序表、栈和队列等经典结构,并通过代码实现了它们的核心功能。从今天开始,我们将开启一个全新的数据结构篇章——树结构。与之前讨论的线性结构不同,树形…...

Python3 简易DNS服务器实现
使用Python3开发一个简单的DNS服务器,支持配置资源记录(RR),并能通过dig命令进行查询。 让自己理解DNS原理 实现方案 我们将使用socketserver和dnslib库来构建这个DNS服务器。dnslib库能帮助我们处理DNS协议的复杂细节。 1. 安装依赖 首先确保安装了d…...

【Win32 API】 lstrcmpA()
作用 比较两个字符字符串(比较区分大小写)。 lstrcmp 函数通过从第一个字符开始检查,若相等,则检查下一个,直到找到不相等或到达字符串的末尾。 函数 int lstrcmpA(LPCSTR lpString1, LPCSTR lpString2); 参数 lpStr…...
(C语言)超市管理系统 (正式版)(指针)(数据结构)(清屏操作)(文件读写)
目录 前言: 源代码: product.h product.c fileio.h fileio.c main.c 代码解析: 一、程序结构概述 二、product.c 函数详解 1. 初始化商品列表 Init_products 2. 添加商品 add_product 3. 显示商品 display_products 4. 修改商品 mo…...
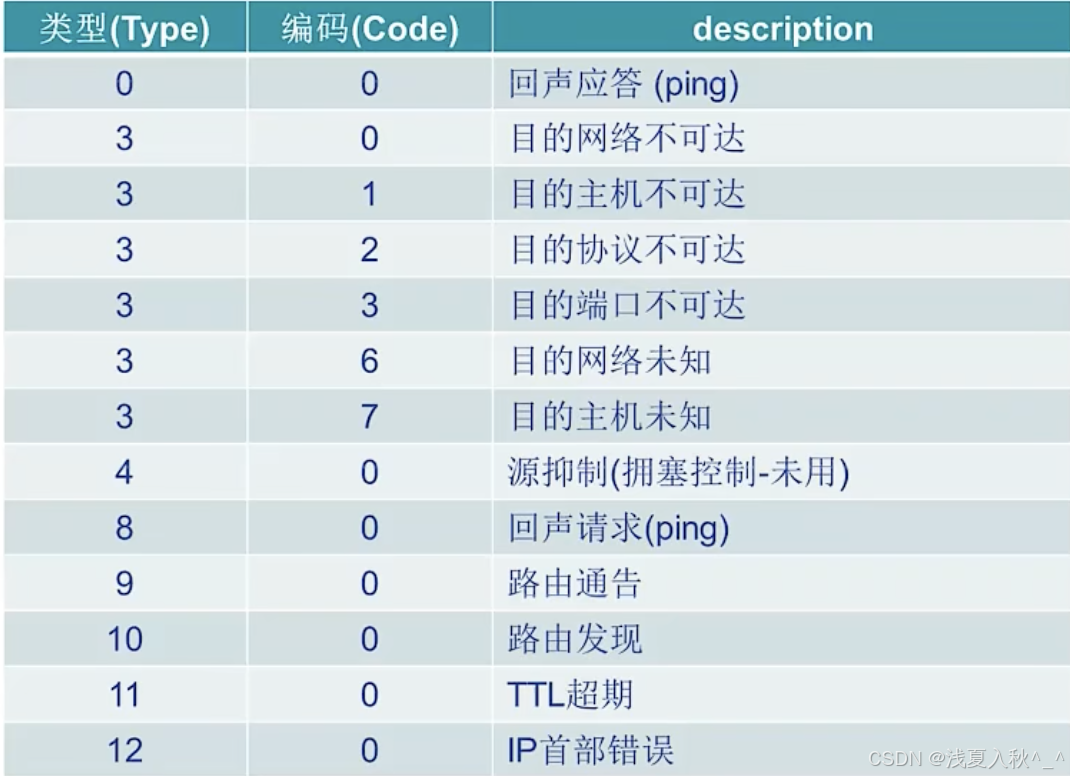
NAT转换和ICMP
NAT nat原理示意 nat实现 ICMP ICMP支持主机或路由器: 差错或异常报告网络探寻 2类icmp报文: 差错报告报文(5种) 目的不可达源抑制--拥塞控制超时&超期--TTL超时参数问题--问题报文丢弃重定向--不应该由这个路由器转发&a…...

Executors类详解
Executors类详解 Executors 是Java中用于快速创建线程池的工具类,提供了一系列工厂方法,简化了 ThreadPoolExecutor 和 ScheduledThreadPoolExecutor 的配置。以下是其核心方法、实现原理及使用注意事项: 1. 常用线程池工厂方法 (1) newFixedThreadPool 作用:创建固定大小…...
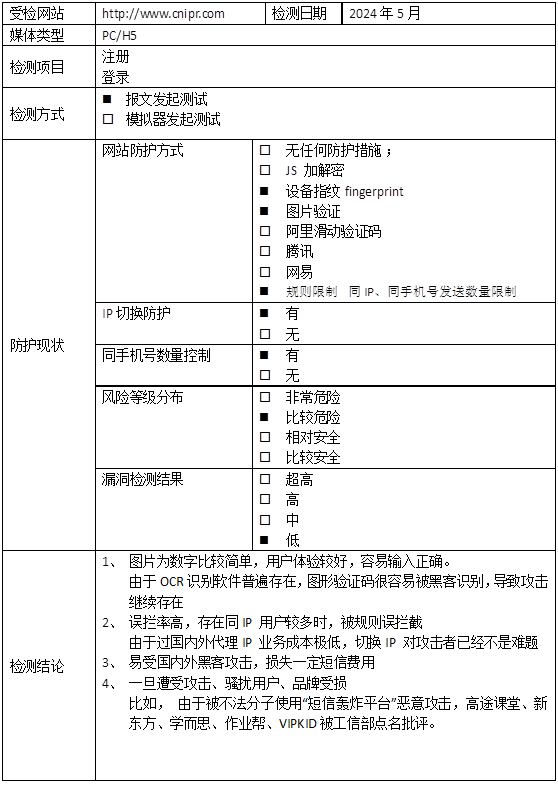
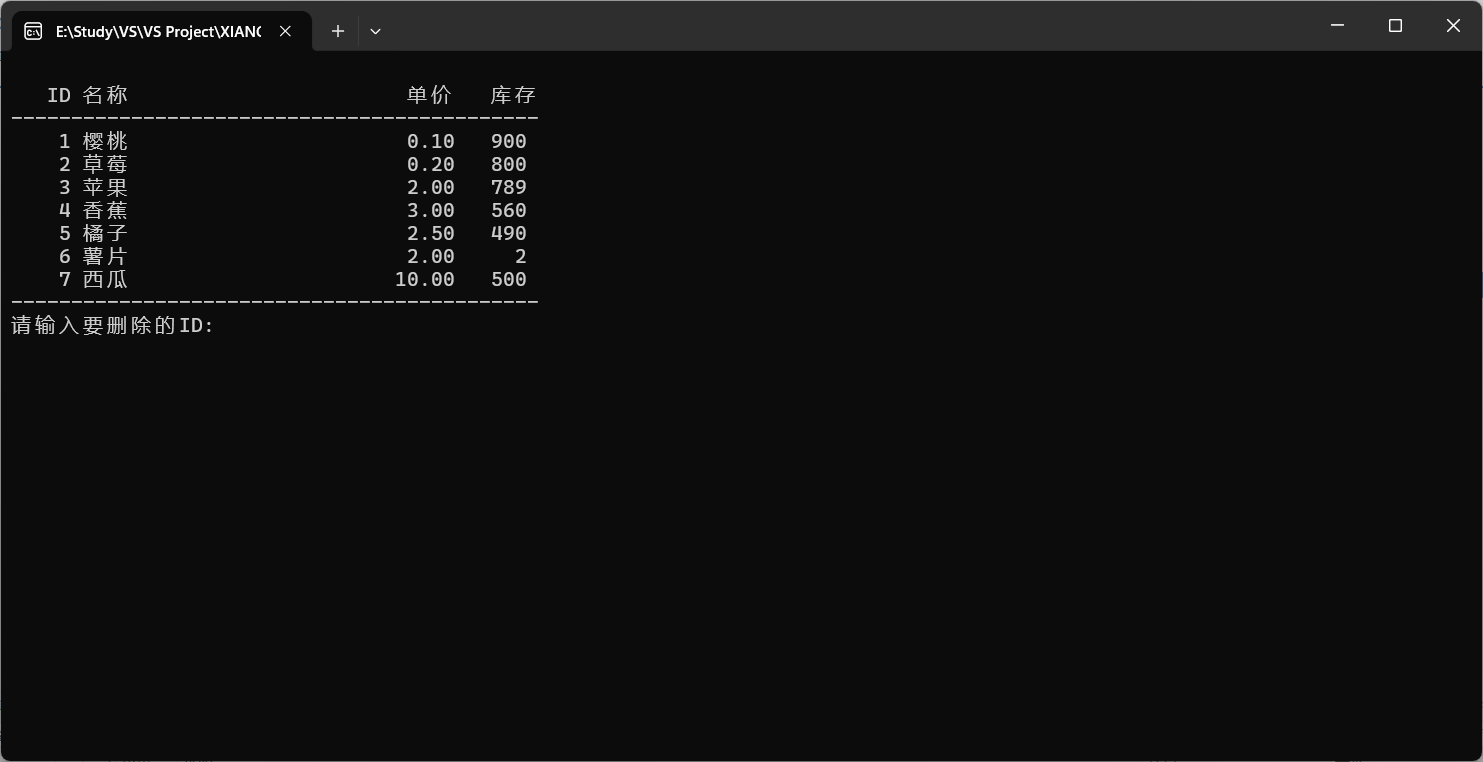
【专利信息服务平台-注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...
BUUCTF——web刷题第一页题解
共31题,admin那题没有,因为环境问题,我做的非常卡 目录 极客大挑战 2019]Havefun [HCTF 2018]WarmU [ACTF2020 新生赛]Include [ACTF2020 新生赛]Exec [GXYCTF2019]Ping Ping Ping [SUCTF 2019]EasySQL [极客大挑战 2019]LoveSQL [极…...

哪个品牌的智能对讲机好用?推荐1款,能扛事更智能
在专业通信领域,智能对讲机早已突破传统设备的局限,成为集通信、调度、数据传输于一体的智能化终端。面对复杂多变的作业环境,用户对设备的稳定性、通信效率和智能化水平提出了更高要求。但是,市面上产品同质化严重,部…...