【论文阅读】针对BEV感知的攻击
Understanding the Robustness of 3D Object Detection with Bird’s-Eye-View Representations in Autonomous Driving
这篇文章是发表在CVPR上的一篇文章,针对基于BEV的目标检测算法进行了两类可靠性分析,即恶劣自然条件以及敌对攻击。同时也提出了一种进行仿真实验的方法-3D相关贴图攻击。
Natural Robustness
自然条件方面,作者进行了三组测试。首先是最简单的噪声、模糊以及数字干扰。在这组测试中,基于BEV的目标检测有着更好的抗干扰能力。其次是天气和光照条件,作者使用白天、晚上、晴天、雨天四种条件进行测试,结果证明弱光条件几乎对所有的目标检测算法都产生了严重影响,虽然整体都产生了下降,但是基于BEV的方法依然表现较好。最后作者测试了部分相机失效的情况,所有算法都产生了不同程度的下降,但是由于BEV全局感知的特点,下降的幅度还要比其它算法稍微好一点点。
Adversarial Robustness
敌对攻击方面,作者也进行了三组测试。首先是对图像增加扰动,这里对应的是那种完全无法在现实中进行部署的对整个图像的扰动,作者使用FGSM和PGD两种方法进行扰动。结果来看,扰动对于不同模型有着不同程度的影响,对BEVFusion这种多传感器融合的方法影响较小,对基于BEV的方法有着很严重的干扰,作者进一步验证了为什么会出现这个现象,原因在于BEV的投影过程出现了问题,多个视角下的扰动会在BEV中进行更加复杂的叠加,从而大幅度干扰模型的效果。这部分,作者对多传感器融合的方法进行了额外验证,发现只有点云被攻击时,BEVFusion的效果也是较好的,因为图像部分被用于补充点云,一定程度上增加了抗干扰能力。
在使用攻击贴图的实验中,作者没有直接在2d图像上贴图,而是先在3d包围框中确定贴图位置,之后利用相机的内外参,将端点投影在不同视角下的图像上,从而得到更加准确的贴图位置。通过不断调整贴图的比例,作者发现基于BEV的方法性能下降更多。最后作者也验证了特定类别攻击,即不同类别的攻击对应不同的贴图,结果也是相同的,多传感器融合的方法更加稳定,基于BEV的方法更容易被干扰。
3D Consistent Patch Attack
为了设计一个更加准确的贴图方法,作者提供了这个3d一致性贴图攻击。简单来说就是利用bounding box的真值,在3d的包围框中确定贴图的位置,之后根据相机参数和位置关系,计算贴图的端点会被投影在不同视角下的哪个位置,之后再进行贴图就能让贴的位置更加准确。基于这种方法,作者设计了多相机攻击和时序攻击,也就是在连续的帧中都利用这个真值信息进行3d-2d的贴图计算,结果发现依然是多传感器融合的方法更加稳定。
老实说这篇文章真没干啥,可能是作者背景太厉害才能中CVPR,反正就是证明了BEVFormer虽然效果好,但是也容易受干扰。多传感器融合的方法要比纯相机的方法稳定。比较有价值的是计算贴图位置的这个方法。
Physically Realizable Adversarial Creating Attack Against Vision-Based BEV Space 3D Object Detection
这篇文章是发在CV顶刊TIP的一篇文章,主要是利用一种放在地面上的贴片,来让基于BEV的目标检测算法产生前面有物体的错觉。对于3d目标检测的攻击,根据目标其实可以分为两类:创造一个假的物体(FP)和隐藏一个真实物体(FN),这篇文章对应的就是FP。现有的攻击有两方面不足,一方面是贴图无法模拟十分复杂的场景,另一方面是贴图的深度信息不好在仿真中调整。所以作者提出了一种针对BEV目标检测的攻击方法,主要针对如何准确地贴图以及如何有效地调整参数进行了设计。
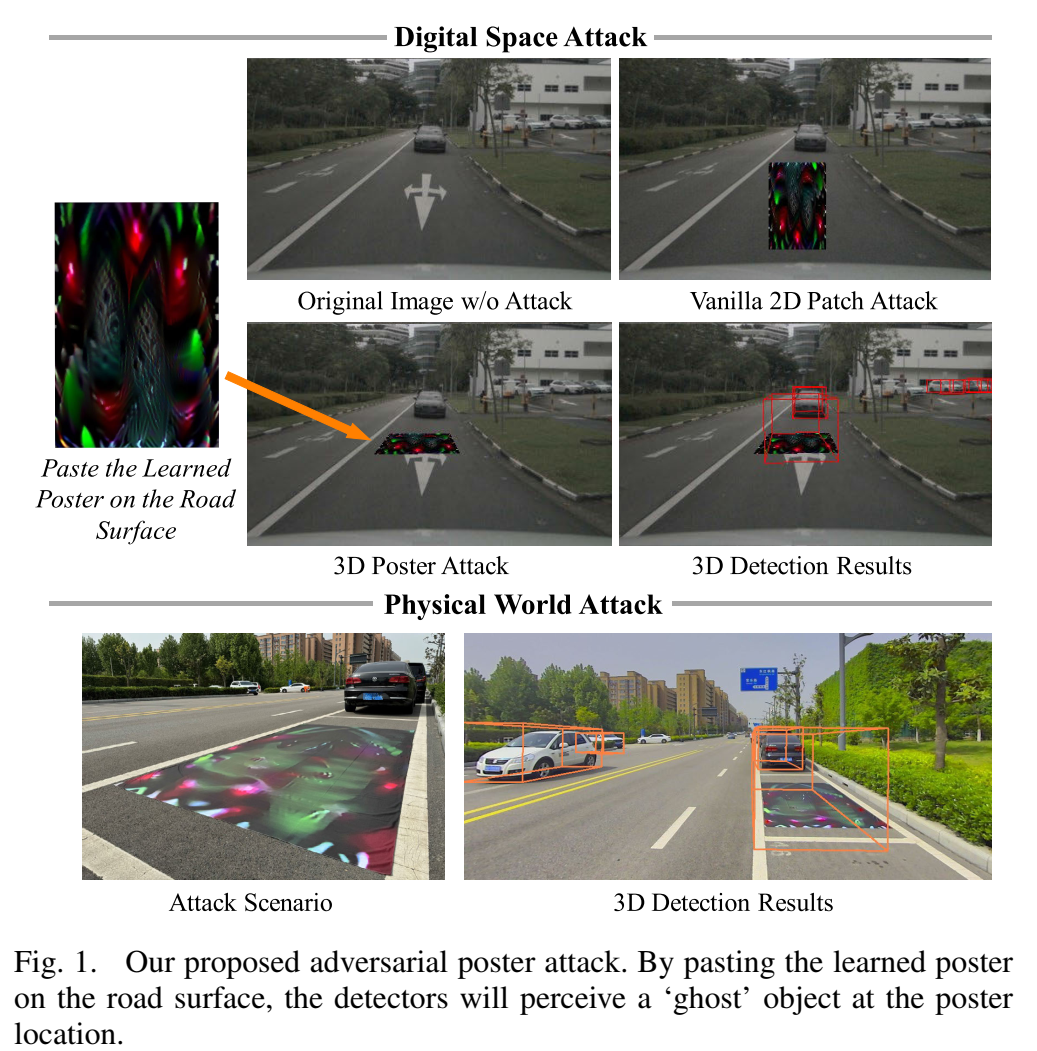
作者提出的攻击具有三个优势:在不同场景下都有效果,在不同视角下都有效果,对不同模型都有效果。为了准确地计算贴图的位置,作者采用了和前面文章相同的方法,在3d场景中贴图,然后根据投影关系转换到2d图像上。由于文章的贴图是放在地面上的,所以在确定攻击贴图的包围框时,作者进行了一系列的约束。贴图被放置在前后两个镜头的范围内,只在地面放置,包围框的底部以周围其它物体中最低点为标准,最后可以得到参数化的攻击贴图的包围框的位置,利用这个位置,可以结合相机的内外参进行投影,得到更加准确的2d攻击图像位置,确定端点位置后,可以根据2d的位置反投影回原本的3d贴图,利用插值就可以确定2d平面上这个位置的像素该显示什么内容。
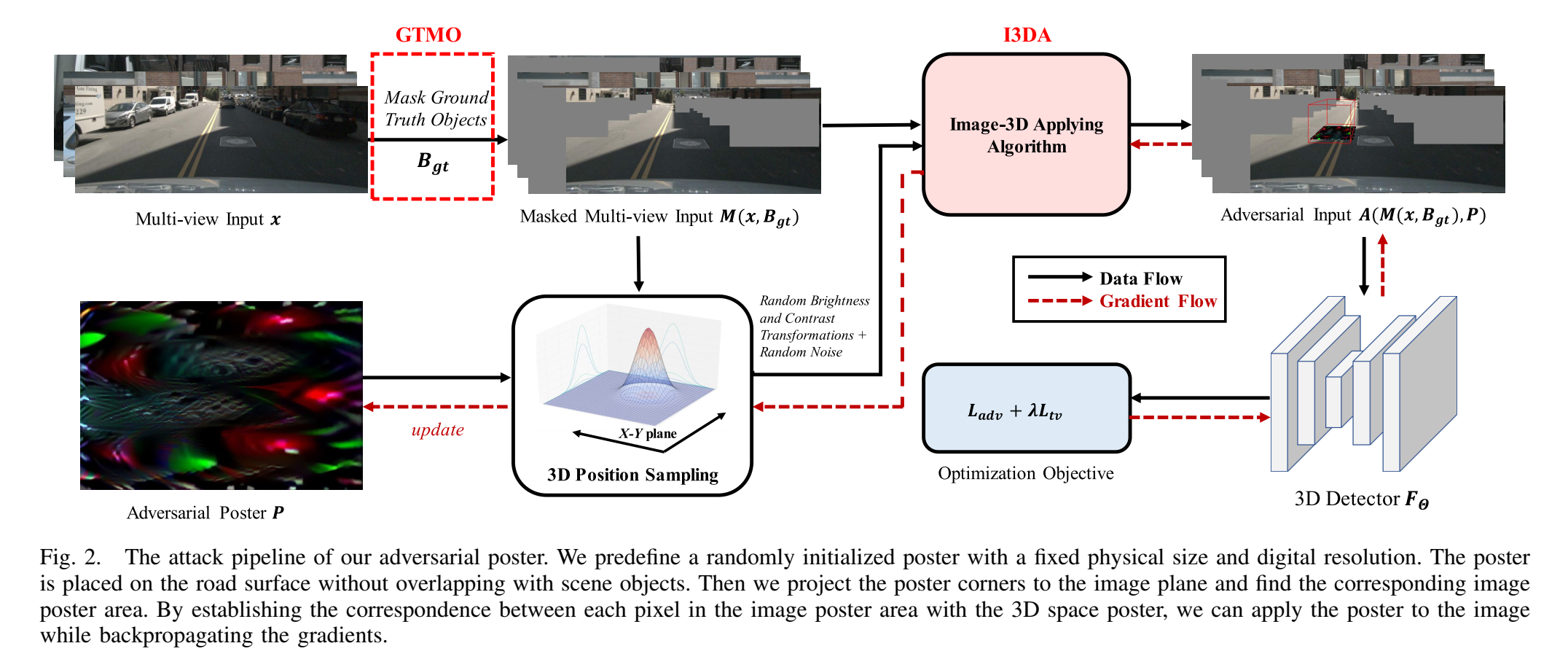
为了更加高效地调整贴图的内容,作者设计了真值掩码优化。我们的目标是注入一个原本不存在的物体,从模型准确度的角度来看,场景中原来就存在一些物体,这些物体本身的正确估计会让我们的攻击不明显,为了让贴图能够被更加准确地优化,作者训练时利用包围框真值去掉了场景中的其它物体,让模型能够直接对贴图产生反应。整体的优化过程依然是老一套,最大化攻击效果以及附加的一些平滑度损失。为了提高攻击的普适性,作者同样调整了贴图的角度、光照、对比度等外界条件,从而使最终产生的贴图有更优的效果。
文章依然属于“调整参数化贴图让目标模型性能下降”的研究,其中比较有意思的是GTMO的部分,相当于扩大了贴图对目标检测性能的干扰。采用的贴图方法和前面文章的贴图方法一样,也是先利用3d确定位置之后再转换到2d平面上。
A Unified Framework for Adversarial Patch Attacks Against Visual 3D Object Detection in Autonomous Driving
与上一篇论文同样的作者,不光是一作一样,貌似是三个作者都一样,内容也很像,让人有一稿多投的嫌疑。
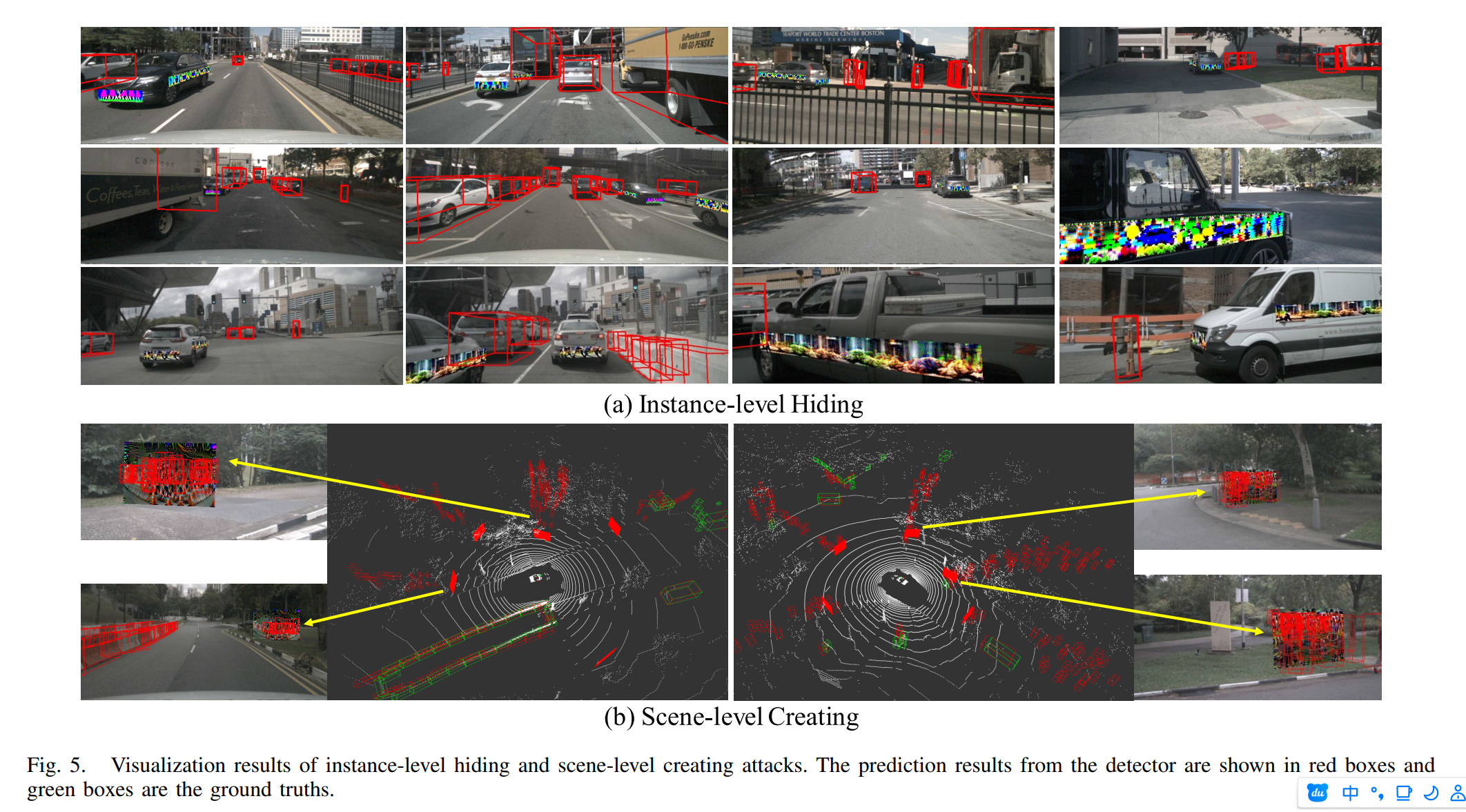
这篇文章主要的目标是让基于BEV的目标检测算法产生错觉,认为一个物体消失了(前面的那一篇文章是在路面上贴图让目标检测检测算法误以为有物体)。相同地,作者也使用了3d贴图的方法,首先将贴图贴在3d的包围框上,之后利用内外参计算出观测结果,之后反向计算像素对应的贴图的内容。作者认为,不同于2d目标检测中的稠密贴图的方法,3d目标检测由于存在前后景的遮挡问题,所以不能够采用这种密集贴图的策略,这会导致贴图不能被稳定观测,从而降低贴图的内容调整。所以作者提出了SOSS策略,每个时刻的多个视角下的图像中,每个图像中只选择一个最接近自车的目标对象,在该对象表面稀疏地渲染补丁,用于训练隐藏攻击的对抗补丁。同时作者也使用距离进行了过滤,只将敌对贴图贴在较近的物体上,从而保证贴图能够被稳定优化。
针对不同的任务,作者提出了两种损失函数。一种是实例级的隐藏贴图,就是希望目标检测算法检测不到被贴图的物体,为了突出贴图带来的影响,作者提出了POAO策略,其实就是上一篇文章中GTMO,通过对其它物体进行遮挡,从而提高patch对最终结果的影响,进而让patch的优化更加有效。通过调整参数化的贴图内容,让模型的输出检测出空物体的概率最大化。

另一种损失函数是场景级的贴图创建,它的目标是让目标检测算法误认为场景中存在有大量的物体,本质上是让目标检测算法在贴图区域检测出尽可能多的物体。

带有贴图的物体会被放置在场景中,从实验中的插图来看,攻击的效果是在贴图的区域产生检测到了多个物体,这些物体都是在贴图的区域内,而不是在场景中有均匀分布的物体。
相关文章:
【论文阅读】针对BEV感知的攻击
Understanding the Robustness of 3D Object Detection with Bird’s-Eye-View Representations in Autonomous Driving 这篇文章是发表在CVPR上的一篇文章,针对基于BEV的目标检测算法进行了两类可靠性分析,即恶劣自然条件以及敌对攻击。同时也提出了一…...

18.中介者模式:思考与解读
原文地址:中介者模式:思考与解读 更多内容请关注:深入思考与解读设计模式 引言 在软件开发中,尤其是处理多个对象交互时,你是否遇到过一个问题:当多个对象需要互相通信时,系统变得复杂,难以管…...
flutter 配置 安卓、Ios启动图
android 配置启动图 launch_background.xml <?xml version"1.0" encoding"utf-8"?> <!-- Modify this file to customize your launch splash screen --> <layer-list xmlns:android"http://schemas.android.com/apk/res/android&…...
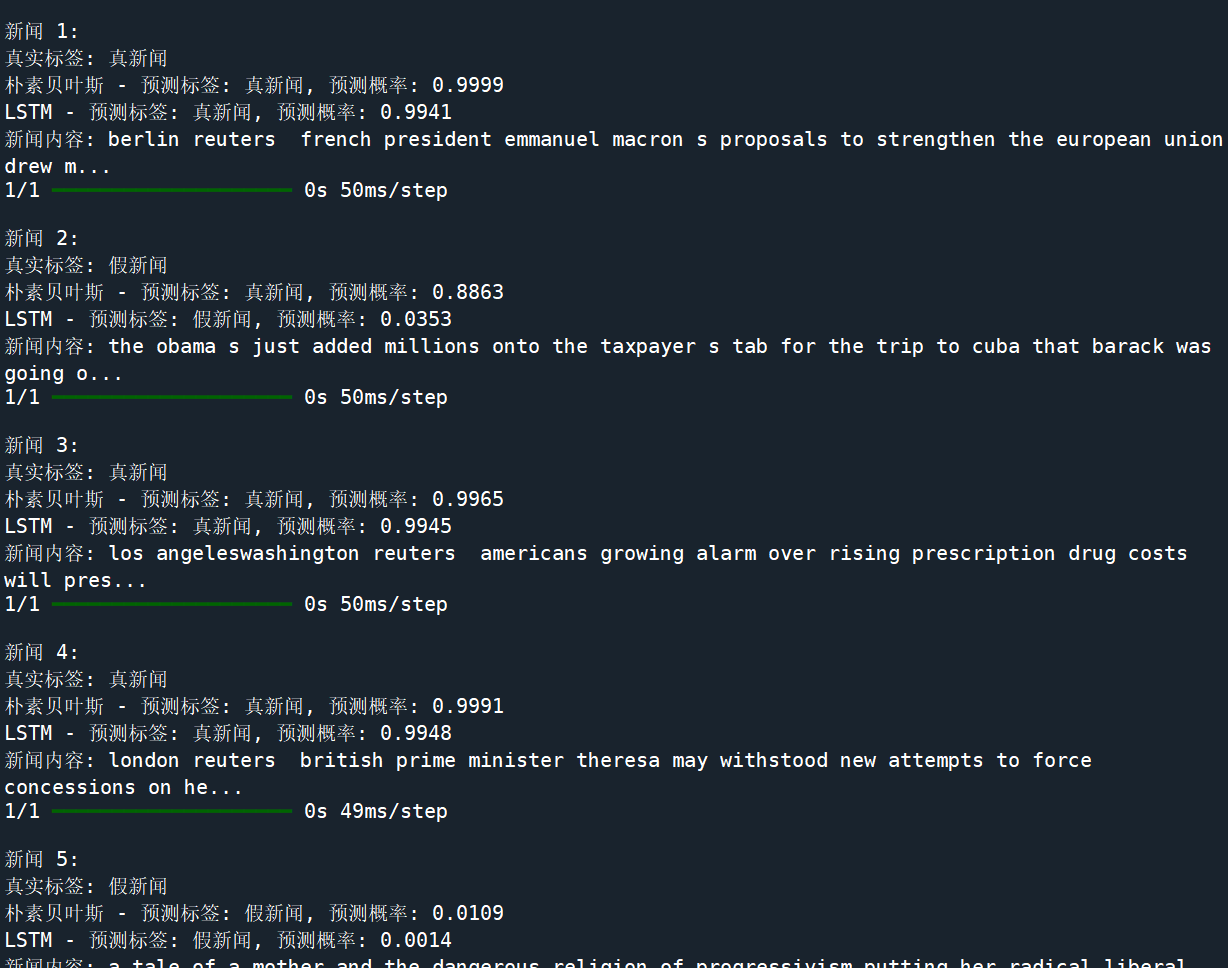
基于朴素贝叶斯与 LSTM 的假新闻检测模型对比分析
一、引言 在信息爆炸的时代,假新闻的传播对社会产生了诸多负面影响。如何快速、准确地识别假新闻成为了重要的研究课题。本文将对比传统机器学习算法(朴素贝叶斯)与深度学习模型(LSTM)在假新闻检测任务中的性能表现&am…...

【LeetCode 热题 100】搜索插入位置 / 搜索旋转排序数组 / 寻找旋转排序数组中的最小值
⭐️个人主页:小羊 ⭐️所属专栏:LeetCode 热题 100 很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~ 目录 搜索插入位置搜索二维矩阵在排序数组中查找元素的第一个和最后一个位置搜索旋转排序数组寻找旋转排序数组中的最小值…...
副业小程序YUERGS,从开发到变现
文章目录 我为什么写这个小程序网站转小程序有什么坑有什么推广渠道个人开发者如何变现简单介绍YUERGS小程序给独立开发者一点小建议 我为什么写这个小程序 关注我的粉丝应该知道,我在硕士阶段就已经掌握了小程序开发技能,并写了一个名为“约球online”…...
)
计算机视觉与深度学习 | Python实现EMD-VMD-LSTM时间序列预测(完整源码和数据)
EMD-VMD-LSTM 一、完整代码实现二、代码结构解析三、关键参数说明四、性能优化建议五、工业部署方案以下是用Python实现EMD-VMD-LSTM时间序列预测的完整代码,结合经验模态分解(EMD)、变分模态分解(VMD)与LSTM深度学习模型,适用于复杂非平稳信号的预测任务。代码包含数据生…...
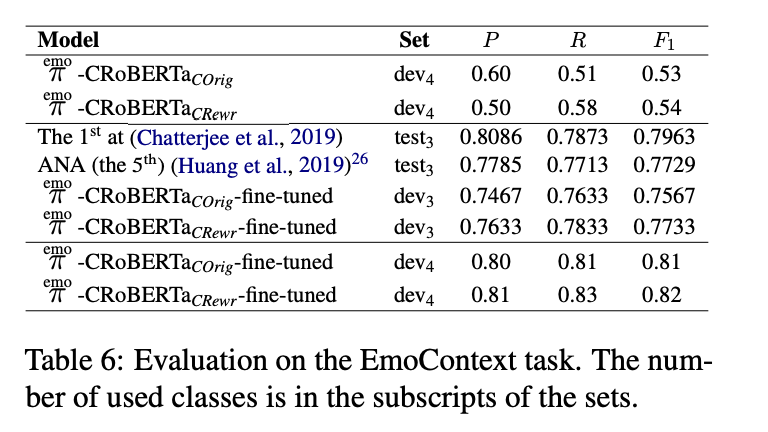
基于LLM合成高质量情感数据,提升情感分类能力!!
摘要:大多数用于情感分析的数据集缺乏意见表达的上下文,而上下文对于理解情绪往往至关重要,并且这些数据集主要局限于几种情绪类别。像 GPT-4 这样的基础大型语言模型(Foundation Large Language Models,LLMsÿ…...

网络检测工具InternetTest v8.9.1.2504 单文件版,支持一键查询IP/DNS、WIFI密码信息
—————【下 载 地 址】——————— 【本章下载一】:https://drive.uc.cn/s/295e068b79314 【本章下载二】:https://pan.xunlei.com/s/VOQDXguH0DYPxrql5y2zlkhTA1?pwdg2nx# 【百款黑科技】:https://ucnygalh6wle.feishu.cn/wiki/…...

SpringBoot中使用Flux实现流式返回的技术总结
背景 近期在使用deepseek/openai等网页和APP时,发现大模型在思考和回复时,内容是一点点的显示出来的,于是好奇他们的实现方式。经调研和使用开发者工具抓取请求,每次聊天会向后台发送一个http请求,而这个接口跟普通接…...

【网络编程】十、详解 UDP 协议
文章目录 Ⅰ. 传输层概述1、进程之间的通信2、再谈端口号端口号的引出五元组标识一个通信端口号范围划分常见的知名端口号查看知名端口号协议号 VS 端口号 3、两个问题一个端口号是否可以被多个进程绑定?一个进程是否可以绑定多个端口号? 4、部分常见指令…...

从零开始理解Jetty:轻量级Java服务器的入门指南
目录 一、Jetty是什么?先看一个生活比喻 二、5分钟快速入门:搭建你的第一个Jetty服务 步骤1:Maven依赖配置 步骤2:编写简易Servlet(厨房厨师) 步骤3:组装服务器(餐厅开业准备&am…...

python05——循环结构
1、while循环 n0 #初始条件 while n<5: #判断print(hello python) #要重复执行的代码print(n) #注意同级代码缩进相同n1 #计数器结果: hello python 0 hello python 1 hello python 2 hello python 3 hello python 4 hello python 5 #求阶乘和 sum0 n1 whil…...

windows触摸板快捷指南
以下是结构化整理后的触控手势说明,采用清晰的层级划分和标准化表述: **触控手势操作规范****1. 单指操作****2. 双指操作****3. 三指操作****4. 四指操作** **优化说明:** 触控手势操作规范 1. 单指操作 手势功能描述等效操作单击滑动选择…...

STM32 ADC 模数转换器详解:原理、配置与应用
STM32 ADC 模数转换器详解:原理、配置与应用 在嵌入式系统中,模数转换(ADC)是实现传感器信号采集、信号处理等任务的关键环节。STM32 微控制器作为一款功能强大的 32 位微控制器,其内置的 ADC 模块为开发者提供了高效…...
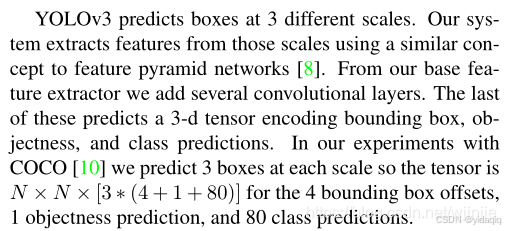
[目标检测] YOLO系列算法讲解
前言 目标检测就是做到给模型输入一张图片或者视频,模型可以迅速判断出视频和图片里面感兴趣的目标所有的位置和它 的类别,而当前最热门的目标检测的模型也就是YOLO系列了。 YOLO系列的模型的提出,是为了解决当时目标检测的模型帧率太低而提…...

React 中,闭包陷阱
文章目录 前言1. 经典闭包陷阱示例过期状态问题 2. 解决方案2.1 正确声明依赖数组2.2 使用 useRef 捕获最新值**2.3 使用函数式更新(针对状态更新)****2.4 使用 useCallback 冻结闭包** **3. 异步操作中的闭包陷阱****事件监听示例** **4. 自定义 Hooks …...

.NET NativeAOT 指南
目录 1. 引言 2. 什么是 .NET NativeAOT? 2.1 NativeAOT 的定义 2.2 NativeAOT 与传统 JIT 的对比 2.3 NativeAOT 的适用场景 3. NativeAOT 的核心优势 3.1 性能提升 3.2 简化部署 3.3 更小的应用体积 3.4 知识产权保护 4. NativeAOT 的基本用法 4.1 环境…...
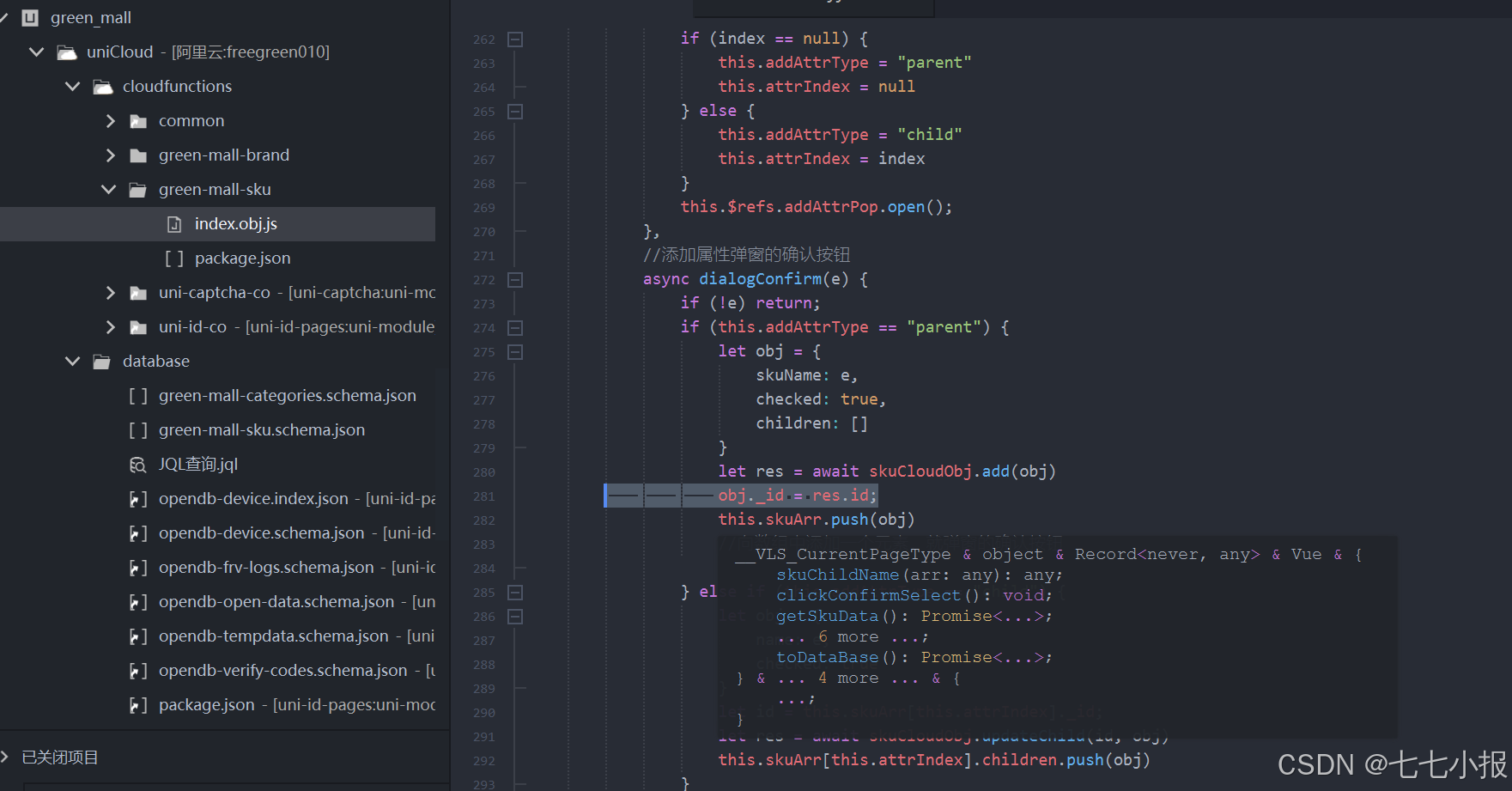
uniapp-商城-57-后台 新增商品(弹窗属性数据添加父级)
后台增加商品,需要添加相关的数据信息,这里还要添加属性,前面已经对相关的界面布局继续了编写。这里还要对页面添加的数据,置入到云数据库,继续永久保存,便于后期的使用。这里主要是讲属性数据 父级信息的添…...

摩方 12 代 N200 迷你主机(Ubuntu 系统)WiFi 抓包环境配置教程
摩方12代N200迷你主机标配 Intel AX201无线网卡,支持 WiFi 6 协议(802.11ax)及蓝牙5.2。此网卡兼容主流抓包工具,但需注意: 驱动兼容性:Ubuntu 20.04及以上内核版本(5.4)默认支持AX2…...

matlab多智能体网络一致性研究
一个基于连续时间多智能体系统(Multi-Agent Systems, MAS)的一阶一致性协议的MATLAB仿真代码,包含网络拓扑建模、一致性协议设计和收敛性分析。代码支持固定拓扑和时变拓扑,适用于学术研究。 1. 基础模型与代码框架 (1) 网络拓扑…...
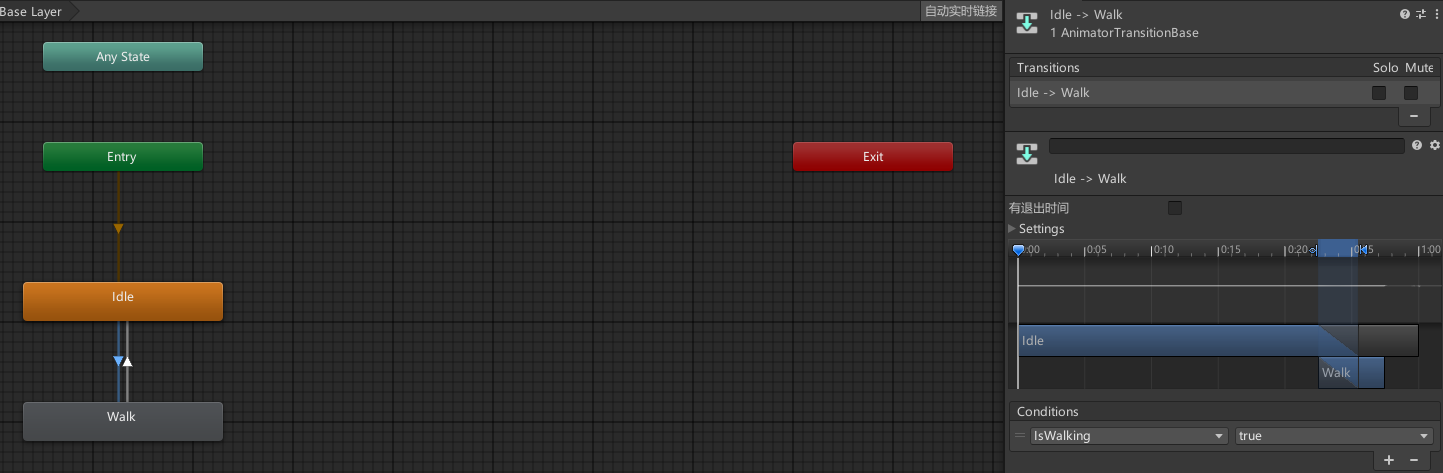
Unity(URP渲染管线)的后处理、动画制作、虚拟相机(Virtual Camera)
一、URP渲染管线 渲染管线是一系列渲染操作的集合,Unity提供了内置渲染管线(Built-In)和可编程渲染管线(SRP)两类渲染管线。内置渲染管线是Unity的默认渲染管线,其自定义选项有限。而可编程渲染管线可以通…...

C语言:在 Win 10 上,gcc 如何编译 gtk 应用程序
在 Windows 10 上使用 g(或 gcc)编译基于 GTK 的 C 语言程序是完全可行的,且相比 Tcc 更为推荐,因为 g(GNU 编译器套件)对 GTK 的支持更加完善,配置也更简单。以下是详细步骤和注意事项…...
)
阿里云CMH镜像迁移与SMC整机迁移对比及功能详解(同地域跨主体账号场景)
文章目录 一、核心功能对比二、CMH镜像迁移操作流程1.资源调研2.镜像共享3.迁移验证4.限制: 三、SMC整机迁移操作流程1.迁移源导入2.任务配置3.增量同步4.应用验证…...

用vue和go实现登录加密
前端使用CryptoJS默认加密方法: var pass CryptoJS.AES.encrypt(formData.password, key.value).toString()使用 CryptoJS.AES.encrypt() 时不指定加密模式和参数时,CryptoJS 默认会执行以下操作 var encrypted CryptoJS.AES.encrypt("明文&quo…...

政府数据开放试点企业如何抢占特许经营协议黄金席位
首席数据官高鹏律师团队 《中共中央办公厅 国务院办公厅关于 加快公共数据资源开发利用的意见》的落地,标志着数据从“封闭管理的行政资源”正式转变为“可流通的市场要素”。但机遇与风险从来是一枚硬币的两面——特许经营协议的黄金席位背后,隐藏着…...

CSS 锚点滑动效果的技术
CSS 锚点滑动效果的技术 引言 介绍锚点滑动效果的概念及其在网页设计中的重要性。简要说明 基本锚点链接 如何使用HTML中的<a>标签创建基本的锚点链接。示例代码: <a href"#section1">跳转到第一部分</a> <div id"section…...

mac-M系列芯片安装软件报错:***已损坏,无法打开。推出磁盘问题
因为你安装的软件在Intel 或arm芯片的mac上没有签名导致。 首先打开任何来源操作 在系统设置中配置,如下图: 2. 然后打开终端,输入: sudo spctl --master-disable然后输入电脑锁屏密码 打开了任何来源,还遇到已损坏…...
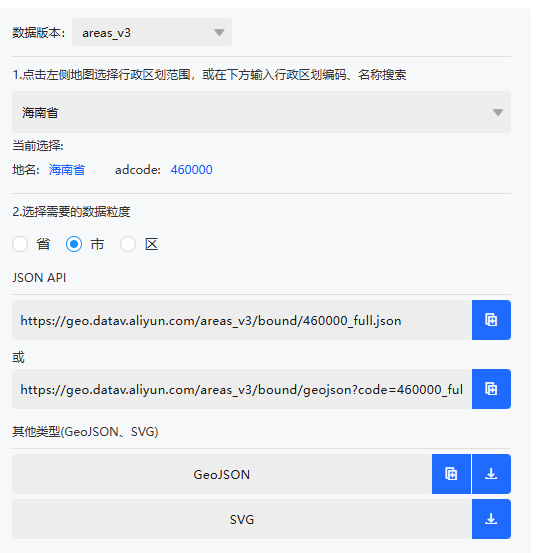
Echart地图数据源获取
DataV.GeoAtlas地理小工具系列 选择需要的区域地图,选中后输出即可: 地图钻取代码 <!DOCTYPE html> <html lang="en"> <head><meta charset="UTF-8"><title>map</title><style>html, body, #map{margin: 0;…...

GNSS数据自动化下载系统的设计与实现
摘要 本文详细介绍了三种不同设计的GNSS数据自动化下载系统,分别针对IGS观测数据、GRACE-FO Level-1B数据以及通过代理服务器获取数据的需求场景。系统采用Python实现,具备断点续传、完整性校验、异常处理和进度显示等核心功能。实验结果表明࿰…...