31-35【动手学深度学习】深度学习硬件
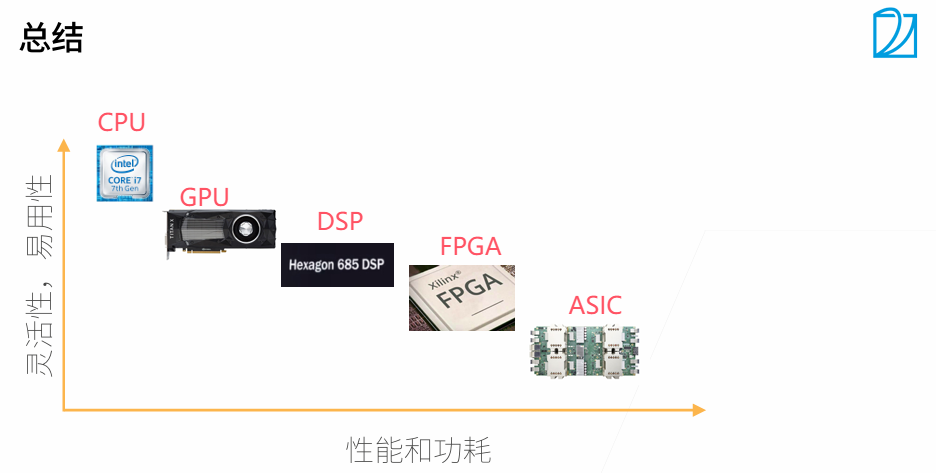
1. CPU和GPU
1.1 CPU
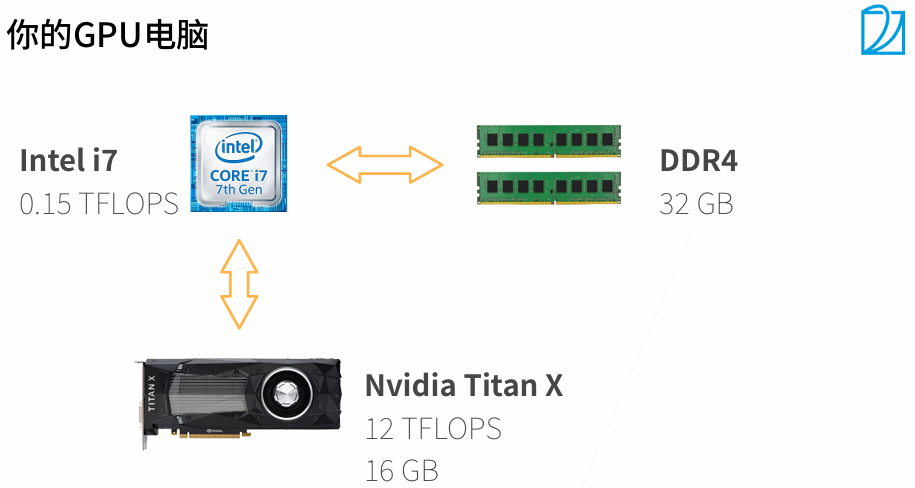
CPU每秒钟计算的浮点运算数为0.15,GPU为12。GPU的显存很低,16GB(可能32G封顶),CPU可以一直插内存。
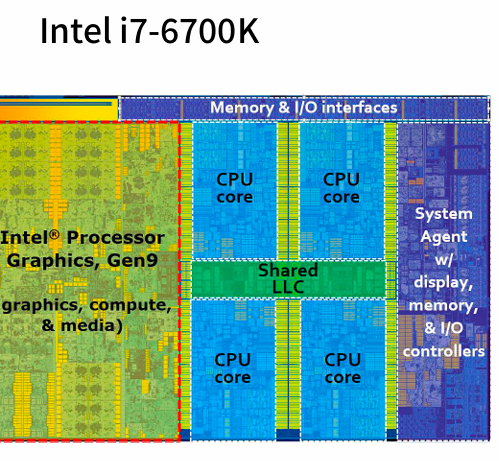
左边是GPU(只能做些很简单的游戏,视频处理),中间是CPU,右边是连接的通道,shared LLC第三级缓存(最后一级缓存)。
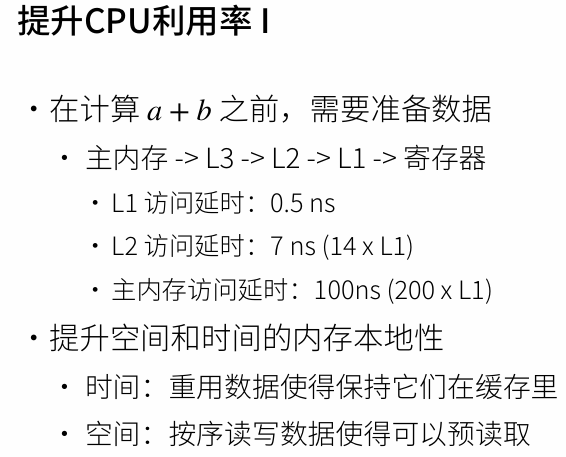
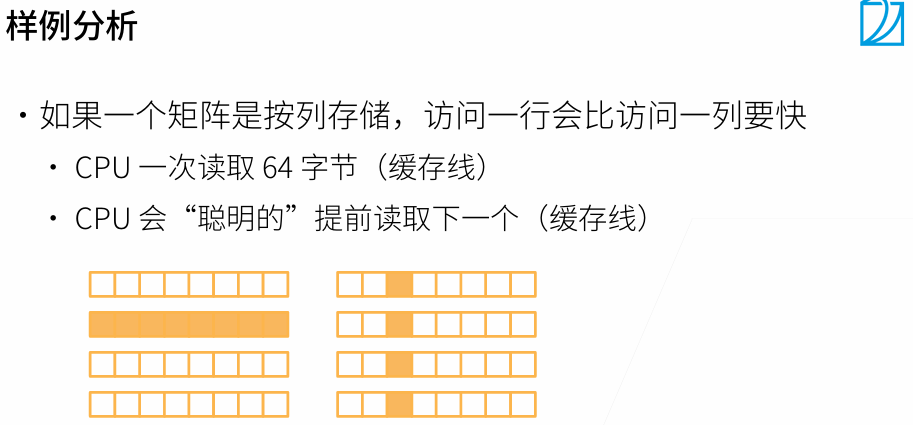
a和b都是向量,刚开始放在内存中,数据只有加载到寄存器中,才能参与运算,L3就是shared LLC。最快的是寄存器。
物理上直观上看有四个核(见上面的图),但是其实每个cpu有多个超线程(2个),所以有8个核,但是不一定提升性能,因为寄存器共用。
1.2 GPU
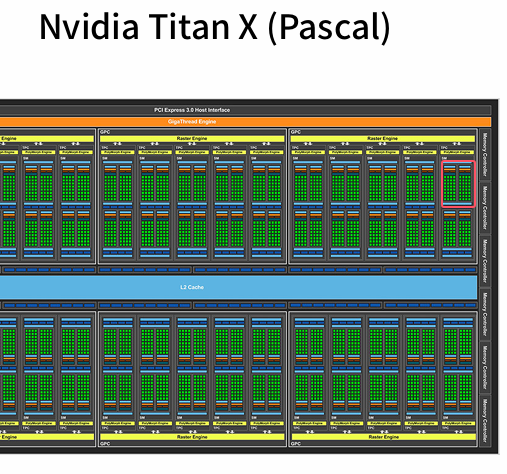
框红的就是一个核,十个(黄色线下)小核是一个大核,3060和3080的区别就是一个大核小,一个大核多。每个绿点是一个寄存单元,可以在一个绿点上开一个线程(上千个),(对于CPU来说,一个核算一个值,但是GPU是一个绿点算一个值)。就算一个绿点比GPU的一个核计算能力弱,但是GPU胜在绿点多。
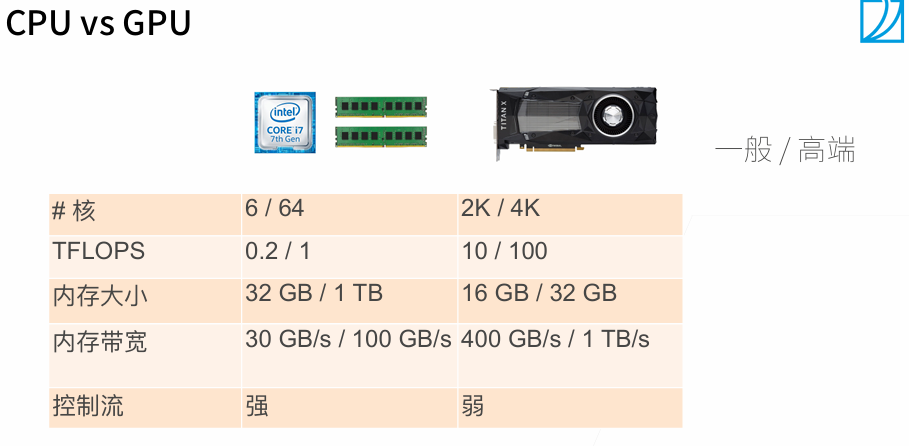
/斜杠两侧分别是低端和高端CPU,GPU。GPU的显存很贵,所以内存很小。CPU的可能一半都是在做逻辑控制,所以控制流更强,(因为CPU不经常计算一个矩阵,但是可能渲染一个html网页)。
AMD的GPU游戏性能好,但是对高性能计算支持不算好。Intel有集成显卡,ARM的CPU和GPU在嵌入式端(手机)常用。
1.3 QA
①固定其他,增加数据(高质量数据)是提高泛化性最简单和最有效的办法,当有很多数据时,调参就没那么有用 ,固定数据集,调参有用
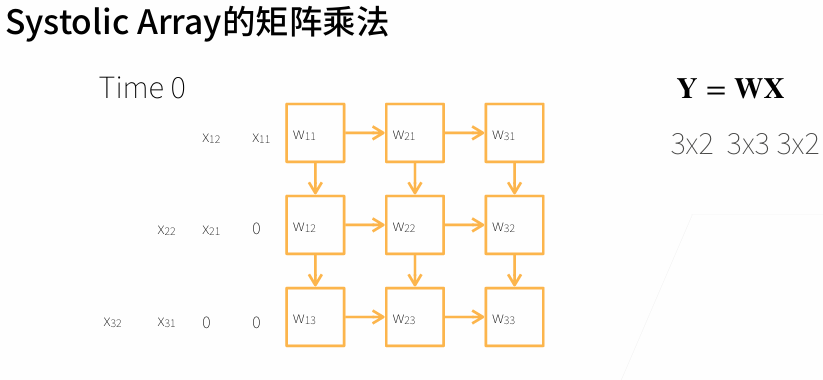
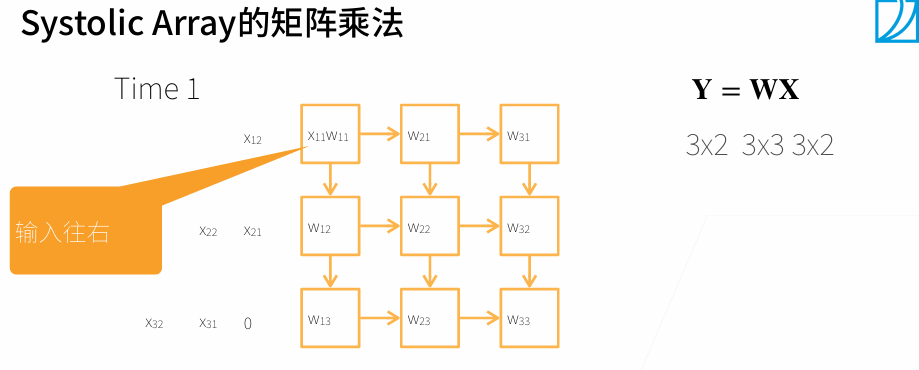
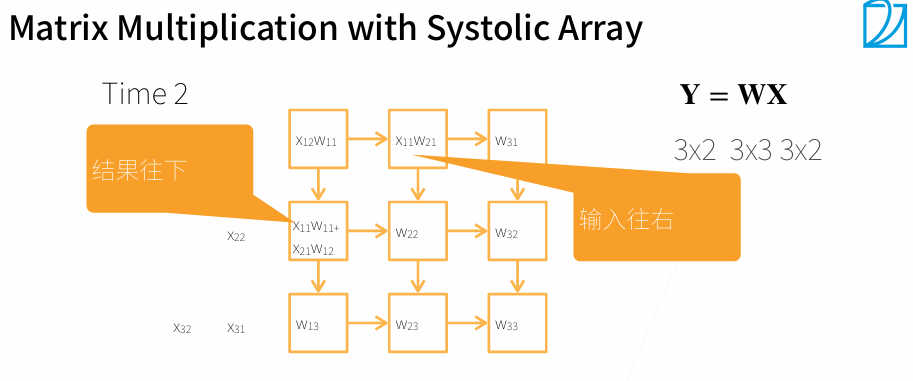
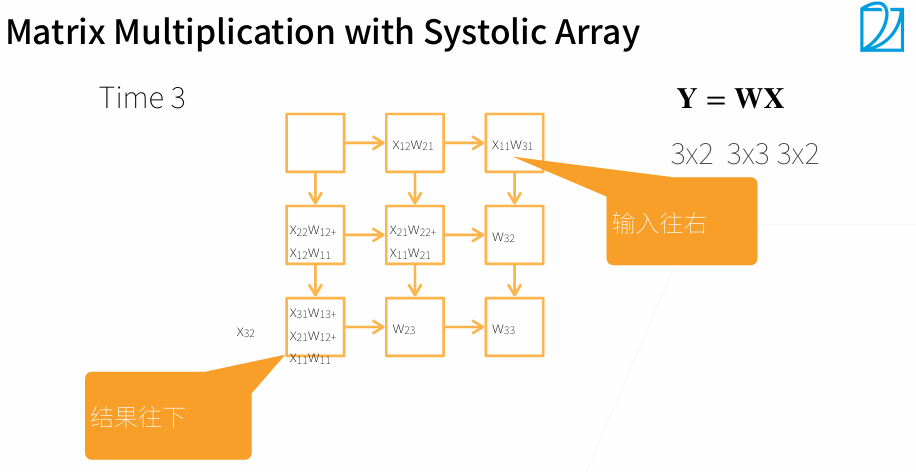
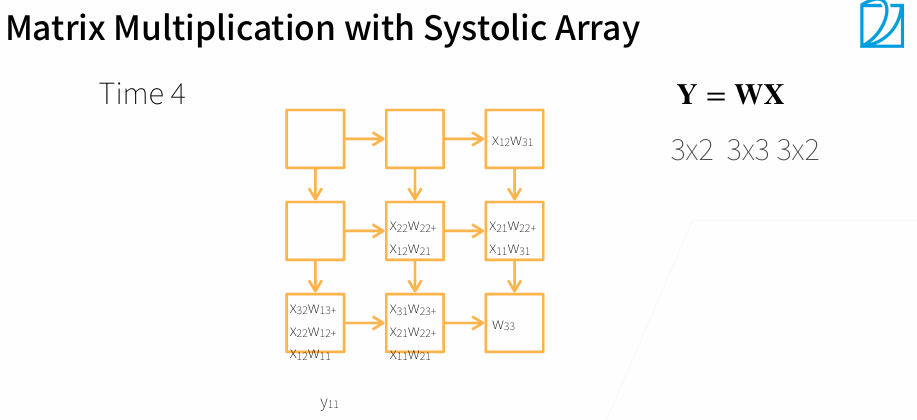
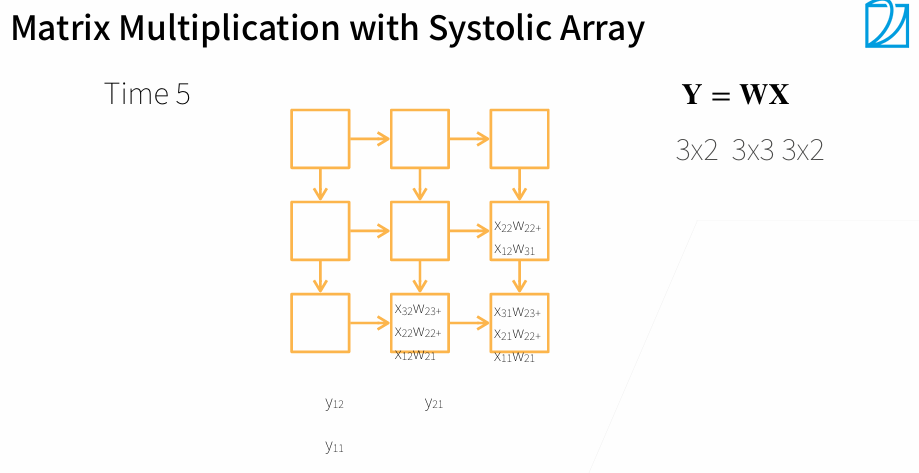
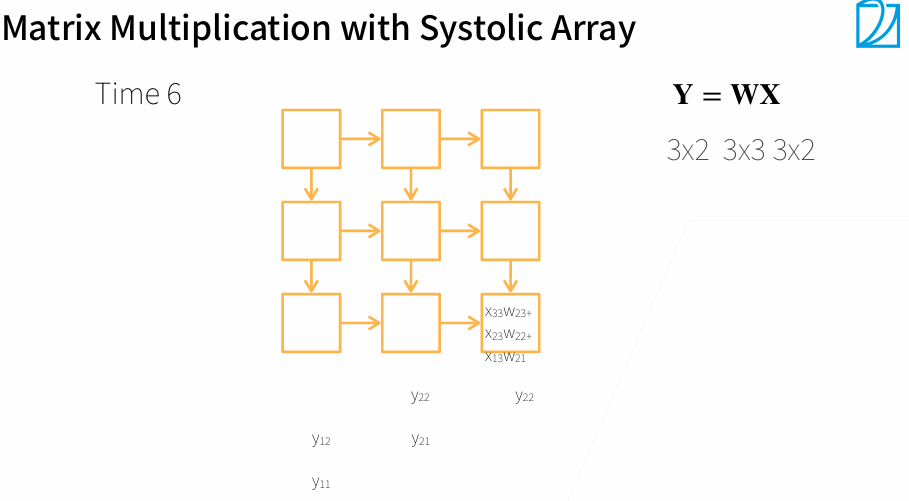
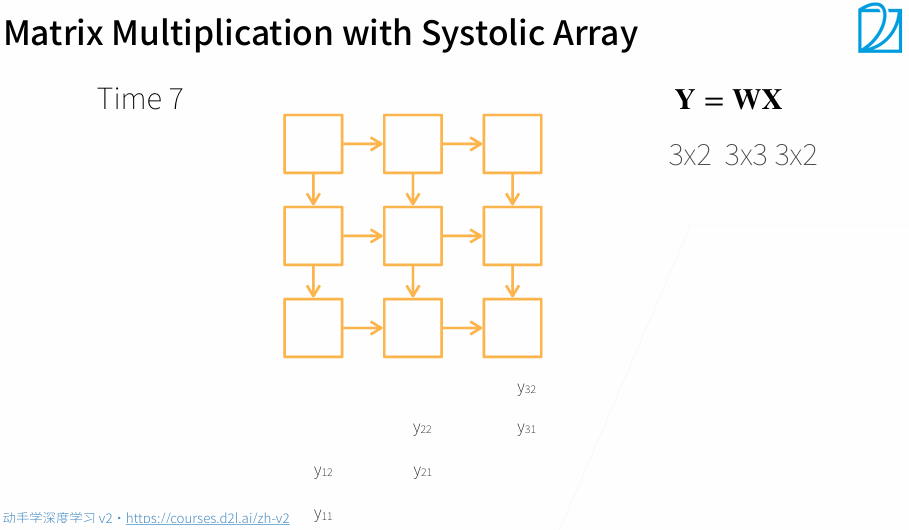
2. TPU和其他

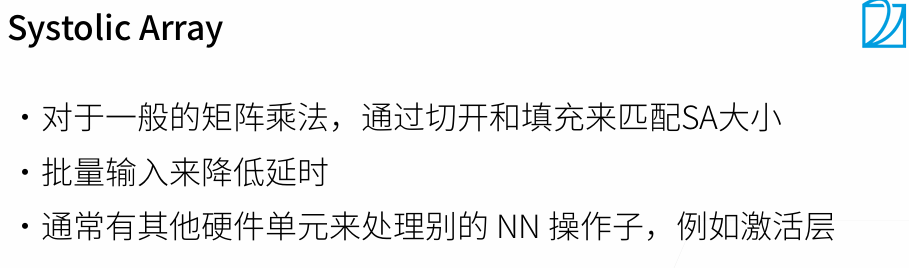
ASIC容易造,不同于通用GPU,ASIC比较专用,容易开发
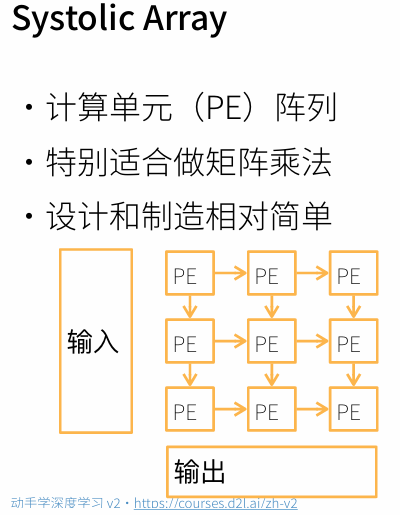
一个Systolic Array相当于一个核
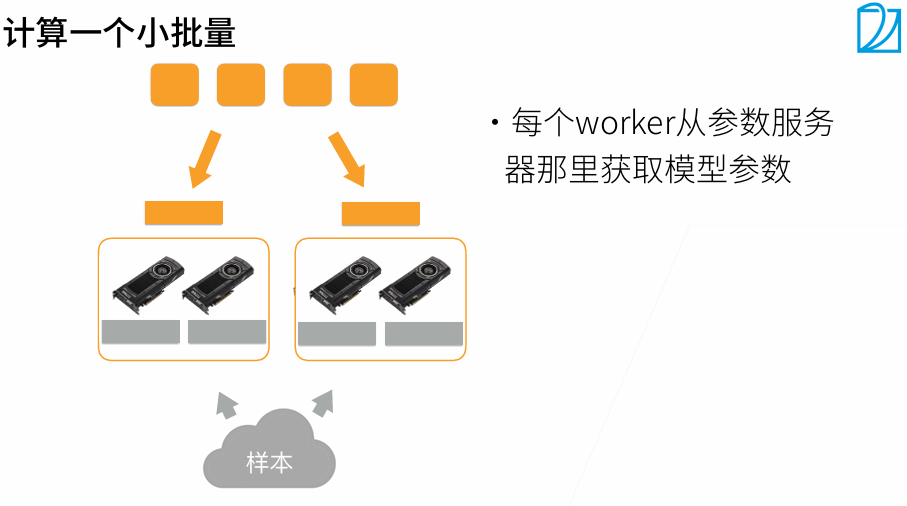
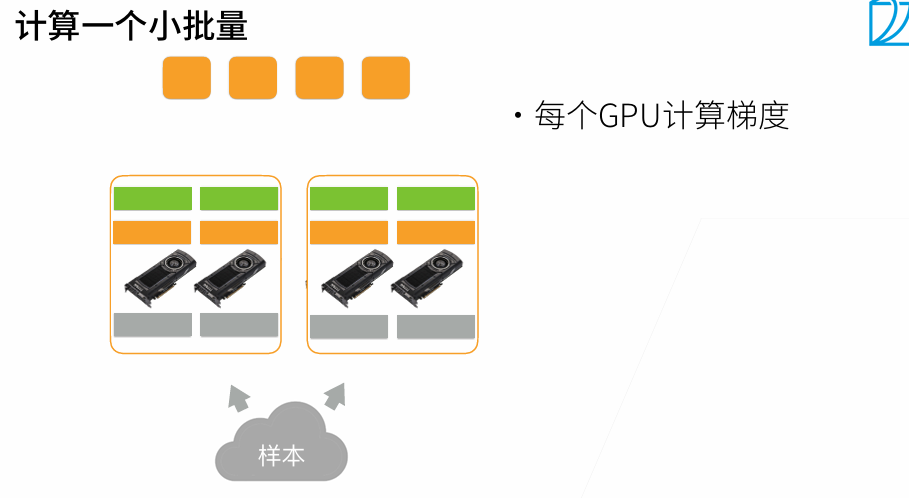
3. 多GPU训练
3.1 理论
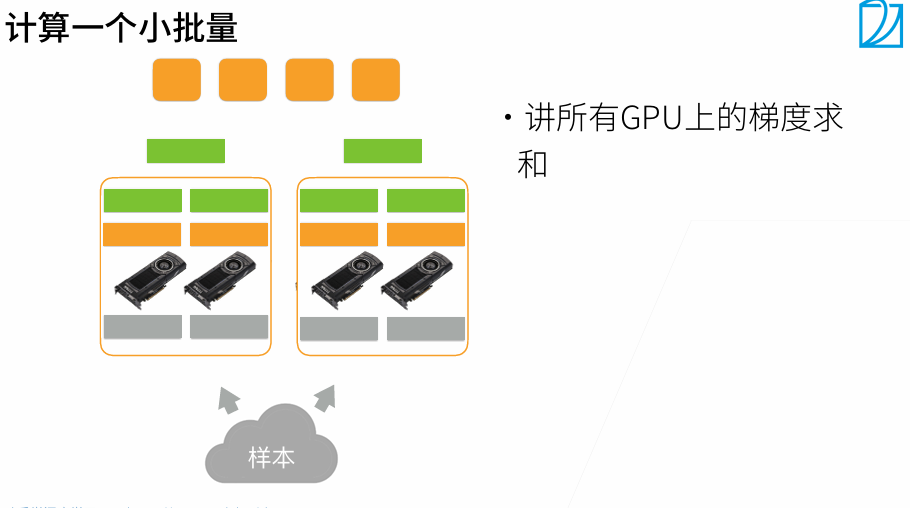
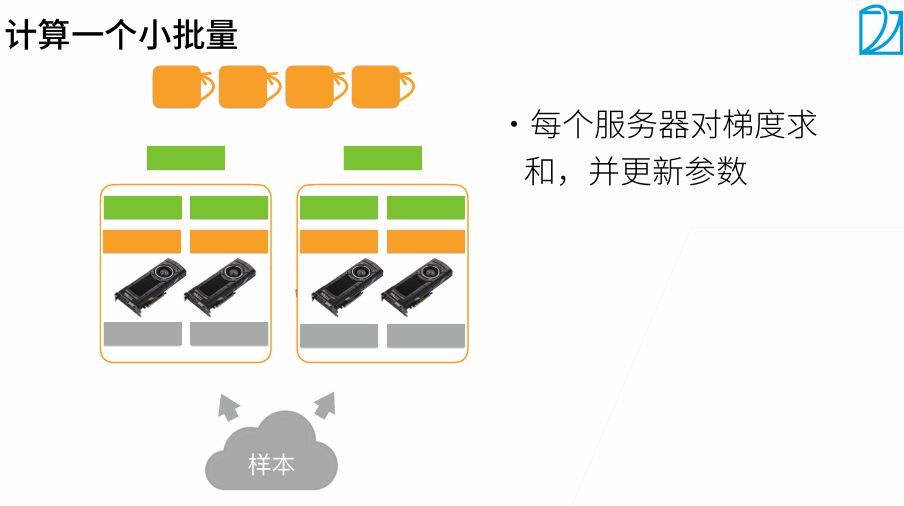
数据并行:加入一个batch是128个样本,有两个GPU,每个GPU计算64个样本的梯度再求和
模型并行:ResNet的前50层在GPU0,后50层在GPU1上。在前50层计算完结果后,传给GPU1。transformer常用到。
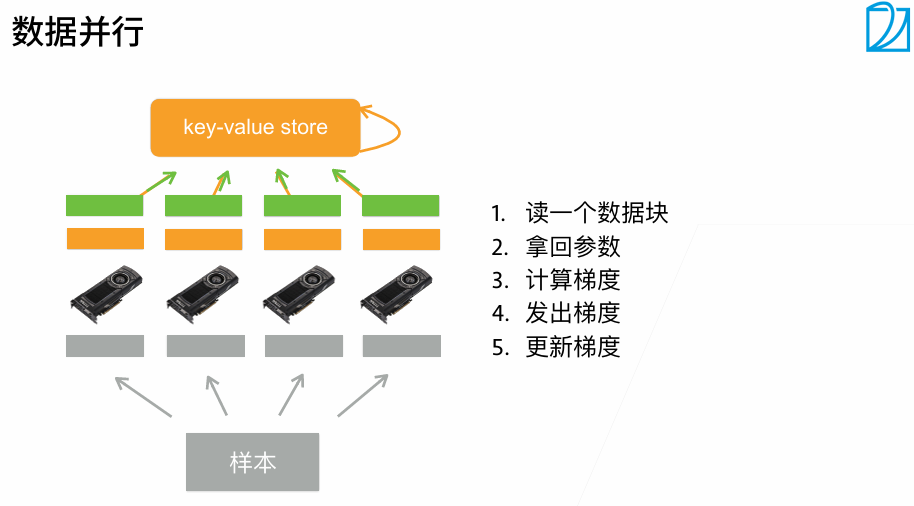
四个卡计算效率差不多,并行性很好
3.2 代码
3.2.1 复杂实现
%matplotlib inline
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l简单网络
scale = 0.01
W1 = torch.randn(size=(20, 1, 3, 3)) * scale
b1 = torch.zeros(20)
W2 = torch.randn(size=(50, 20, 5, 5)) * scale
b2 = torch.zeros(50)
W3 = torch.randn(size=(800, 128)) * scale
b3 = torch.zeros(128)
W4 = torch.randn(size=(128, 10)) * scale
b4 = torch.zeros(10)
params = [W1, b1, W2, b2, W3, b3, W4, b4]def lenet(X, params):h1_conv = F.conv2d(input=X, weight=params[0], bias=params[1])h1_activation = F.relu(h1_conv)h1 = F.avg_pool2d(input=h1_activation, kernel_size=(2, 2), stride=(2, 2))h2_conv = F.conv2d(input=h1, weight=params[2], bias=params[3])h2_activation = F.relu(h2_conv)h2 = F.avg_pool2d(input=h2_activation, kernel_size=(2, 2), stride=(2, 2))h2 = h2.reshape(h2.shape[0], -1)h3_linear = torch.mm(h2, params[4]) + params[5]h3 = F.relu(h3_linear)y_hat = torch.mm(h3, params[6]) + params[7]return y_hatloss = nn.CrossEntropyLoss(reduction='none')向多个设备分发参数
def get_params(params, device):new_params = [p.clone().to(device) for p in params]for p in new_params:p.requires_grad_()return new_paramsnew_params = get_params(params, d2l.try_gpu(0))
print('b1 weight:', new_params[1])
print('b1 grad:', new_params[1].grad)![]()
allreduce 函数将所有向量相加(相加到一块GPU上),并将结果广播给所有 GPU
def allreduce(data):for i in range(1, len(data)):data[0][:] += data[i].to(data[0].device)for i in range(1, len(data)):data[i] = data[0].to(data[i].device)data = [torch.ones((1, 2), device=d2l.try_gpu(i)) * (i + 1) for i in range(2)]
print('before allreduce:\n', data[0], '\n', data[1])
allreduce(data)
print('after allreduce:\n', data[0], '\n', data[1])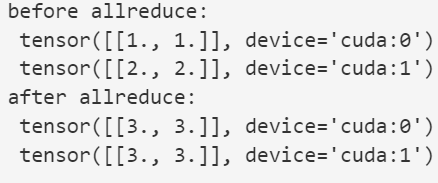
将一个小批量数据均匀地分布在多个 GPU 上
data = torch.arange(20).reshape(4, 5)
devices = [torch.device('cuda:0'), torch.device('cuda:1')]
split = nn.parallel.scatter(data, devices)
print('input:',data)
print('load into', devices)
print('output:', split)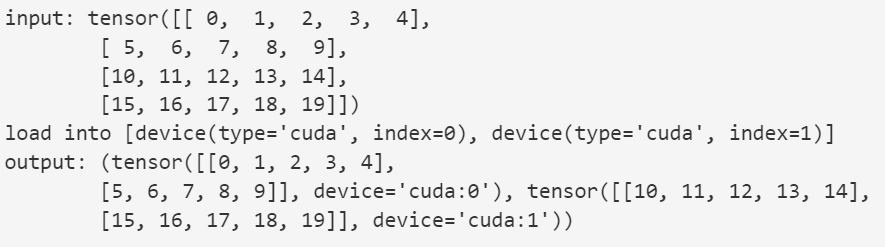
def split_batch(X, y, devices):"""将`X`和`y`拆分到多个设备上"""assert X.shape[0] == y.shape[0]return (nn.parallel.scatter(X, devices), nn.parallel.scatter(y, devices))在一个小批量上实现多 GPU 训练
def train_batch(X, y, device_params, devices, lr):X_shards, y_shards = split_batch(X, y, devices)# 在每个GPU上分别计算损失ls = [loss(lenet(X_shard,device_W), y_shard).sum() for X_shard, y_shard, device_W in zip(X_shards, y_shards, device_params)]for l in ls: # 反向传播在每个GPU上分别执行l.backward()with torch.no_grad():for i in range(len(device_params[0])): # 层数allreduce([device_params[c][i].grad for c in range(len(devices))])# 在每个GPU上分别更新模型参数for param in device_params:d2l.sgd(param, lr, X.shape[0]) # 在这里,我们使用全尺寸的小批量定义训练函数
def train(num_gpus, batch_size, lr):train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)devices = [d2l.try_gpu(i) for i in range(num_gpus)]# 将模型参数复制到num_gpus个GPUdevice_params = [get_params(params, d) for d in devices]num_epochs = 10animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])timer = d2l.Timer()for epoch in range(num_epochs):timer.start()for X, y in train_iter:# 为单个小批量执行多GPU训练train_batch(X, y, device_params, devices, lr)torch.cuda.synchronize()timer.stop()# 在GPU0上评估模型animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(lambda x: lenet(x, device_params[0]), test_iter, devices[0]),))print(f'test acc: {animator.Y[0][-1]:.2f}, {timer.avg():.1f} sec/epoch 'f'on {str(devices)}')在单个GPU上运行
train(num_gpus=1, batch_size=256, lr=0.2)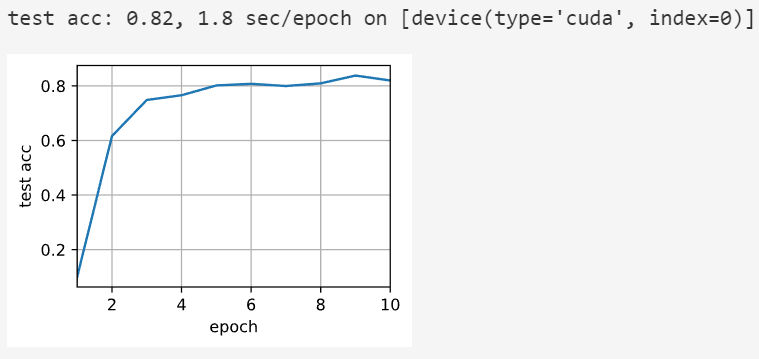
多个GPU
train(num_gpus=2, batch_size=256, lr=0.2)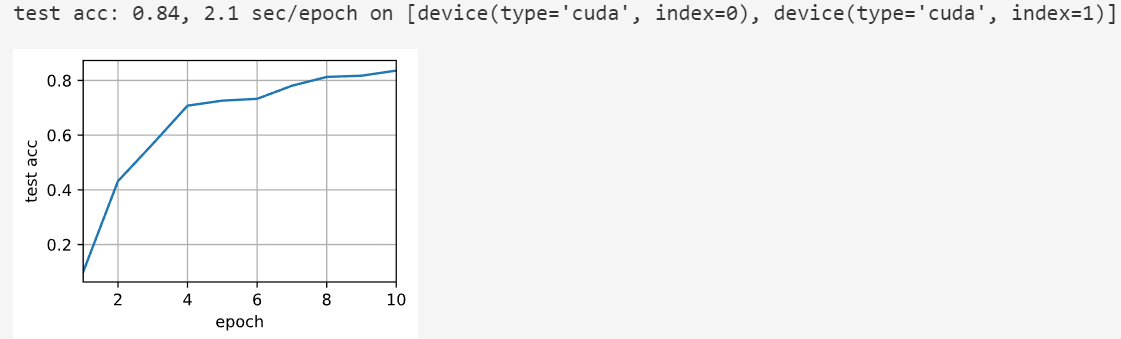
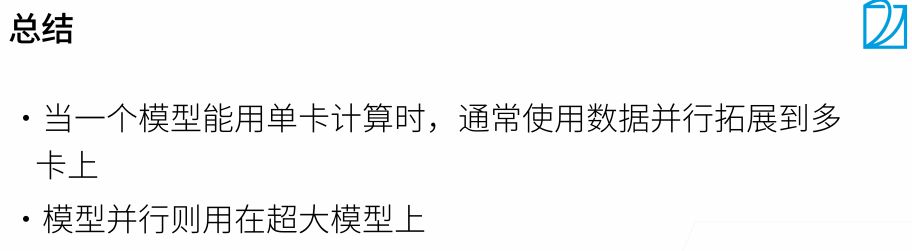
小结
- 有多种方法可以在多个GPU上拆分深度网络的训练。拆分可以在层之间、跨层或跨数据上实现。前两者需要对数据传输过程进行严格编排,而最后一种则是最简单的策略。
- 数据并行训练本身是不复杂的,它通过增加有效的小批量数据量的大小提高了训练效率。
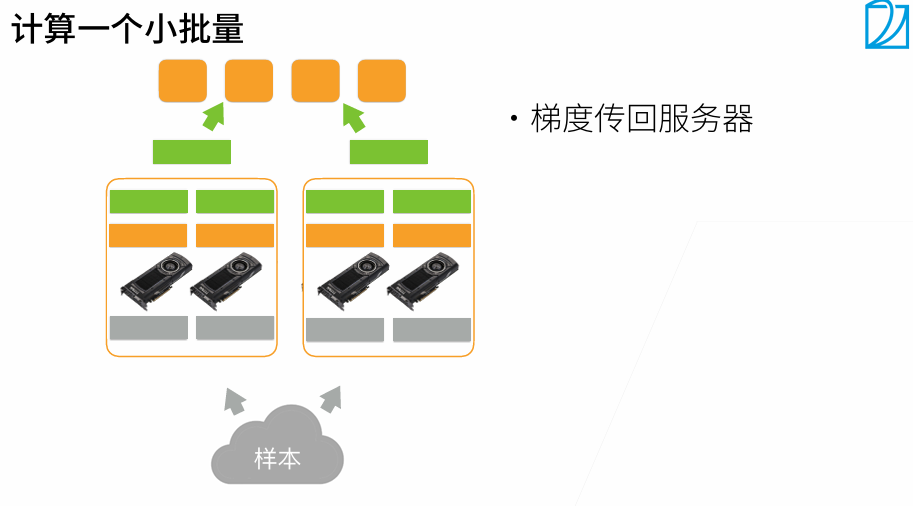
- 在数据并行中,数据需要跨多个GPU拆分,其中每个GPU执行自己的前向传播和反向传播,随后所有的梯度被聚合为一,之后聚合结果向所有的GPU广播。
- 小批量数据量更大时,学习率也需要稍微提高一些。
3.2.2 简洁实现
import torch
from torch import nn
from d2l import torch as d2l简单网络
def resnet18(num_classes, in_channels=1):"""稍加修改的 ResNet-18 模型"""def resnet_block(input_channels, output_channels, num_residuals, first_block=False):blk = []for i in range(num_residuals):if i == 0 and not first_block:# 第一个残差块且不是第一个block时,使用1x1卷积和下采样blk.append(d2l.Residual(output_channels, use_1x1conv=True, strides=2))else:# 其他情况不使用1x1卷积blk.append(d2l.Residual(output_channels, output_channels))return nn.Sequential(*blk)# 网络结构net = nn.Sequential(nn.Conv2d(in_channels, 64, kernel_size=3, stride=1, padding=1),nn.BatchNorm2d(64), nn.ReLU())# 添加残差块net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))net.add_module("resnet_block2", resnet_block(64, 128, 2))net.add_module("resnet_block3", resnet_block(128, 256, 2))net.add_module("resnet_block4", resnet_block(256, 512, 2))# 全局平均池化和全连接层net.add_module("global_avg_pool", nn.AdaptiveAvgPool2d((1, 1)))net.add_module("fc", nn.Sequential(nn.Flatten(), nn.Linear(512, num_classes)))return net# 创建网络实例
net = resnet18(10)
devices = d2l.try_all_gpus()网络初始化
net = resnet18(10)
# 获取GPU列表
devices = d2l.try_all_gpus()
# 我们将在训练代码实现中初始化网络训练
def train(net, num_gpus, batch_size, lr):train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)devices = [d2l.try_gpu(i) for i in range(num_gpus)]def init_weights(m):if type(m) in [nn.Linear, nn.Conv2d]:nn.init.normal_(m.weight, std=0.01)net.apply(init_weights)# 在多个GPU上设置模型net = nn.DataParallel(net, device_ids=devices)trainer = torch.optim.SGD(net.parameters(), lr)loss = nn.CrossEntropyLoss()timer, num_epochs = d2l.Timer(), 10animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])for epoch in range(num_epochs):net.train()timer.start()for X, y in train_iter:trainer.zero_grad()X, y = X.to(devices[0]), y.to(devices[0])l = loss(net(X), y)l.backward()trainer.step()timer.stop()animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(net, test_iter),))print(f'测试精度:{animator.Y[0][-1]:.2f},{timer.avg():.1f}秒/轮,'f'在{str(devices)}')在单个GPU上训练网络
train(net, num_gpus=1, batch_size=256, lr=0.1)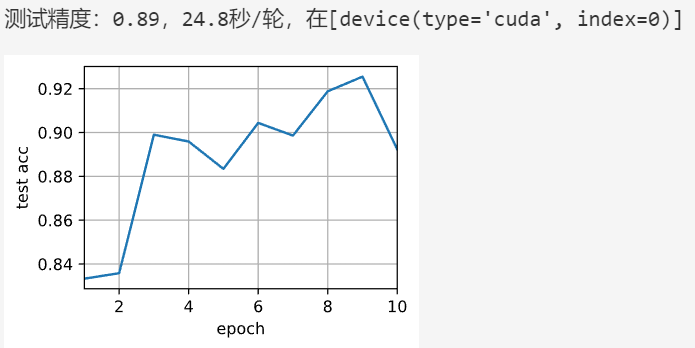
在多个GPU上训练网络
train(net, num_gpus=2, batch_size=512, lr=0.2)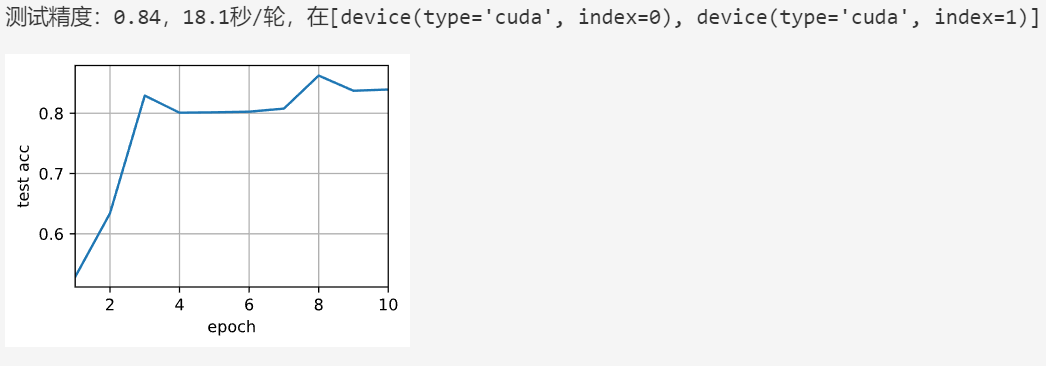
小结
- 神经网络可以在(可找到数据的)单GPU上进行自动评估。
- 每台设备上的网络需要先初始化,然后再尝试访问该设备上的参数,否则会遇到错误。
- 优化算法在多个GPU上自动聚合。
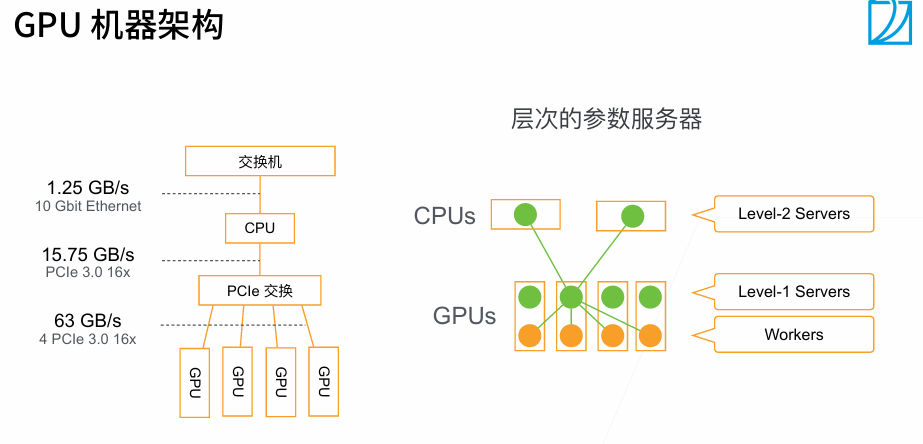
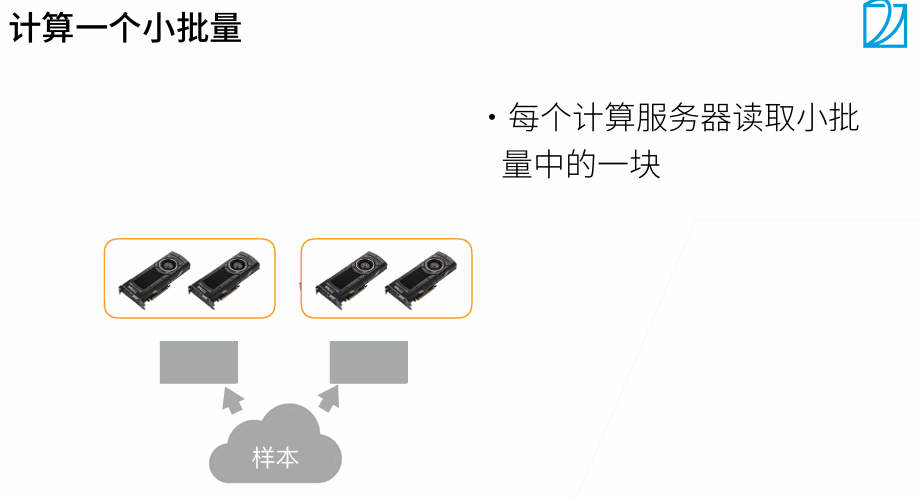
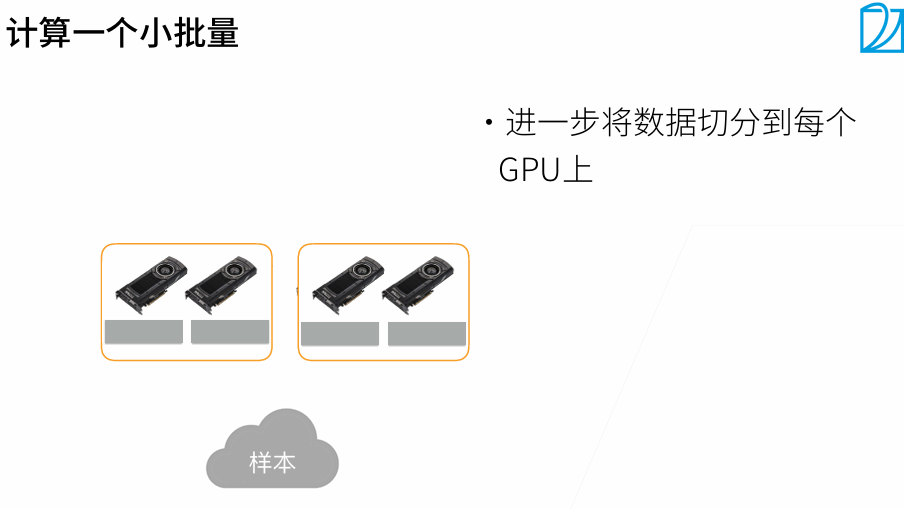
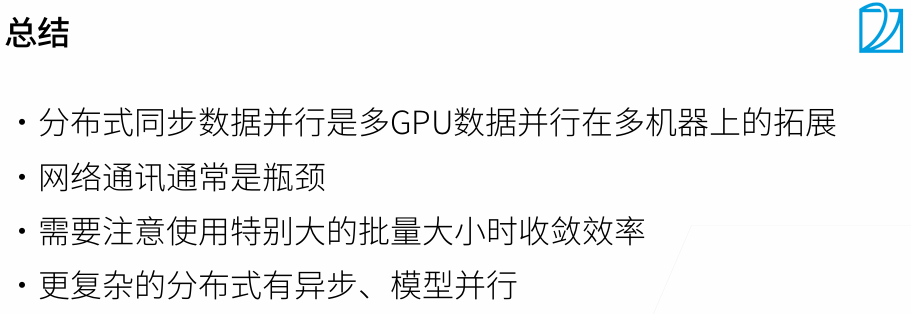
4. 分布式训练

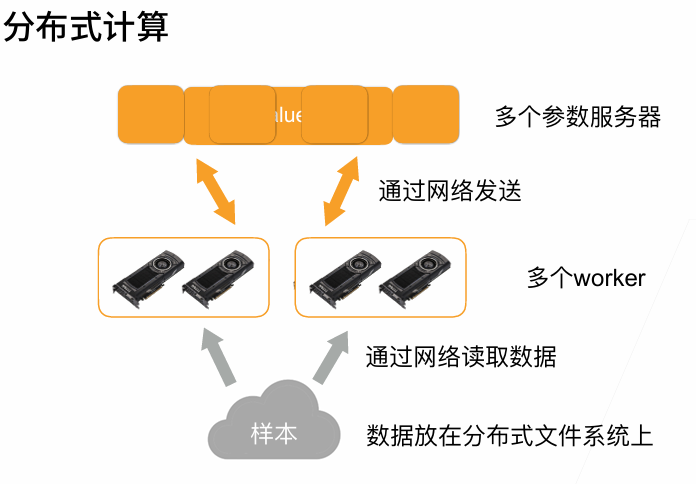

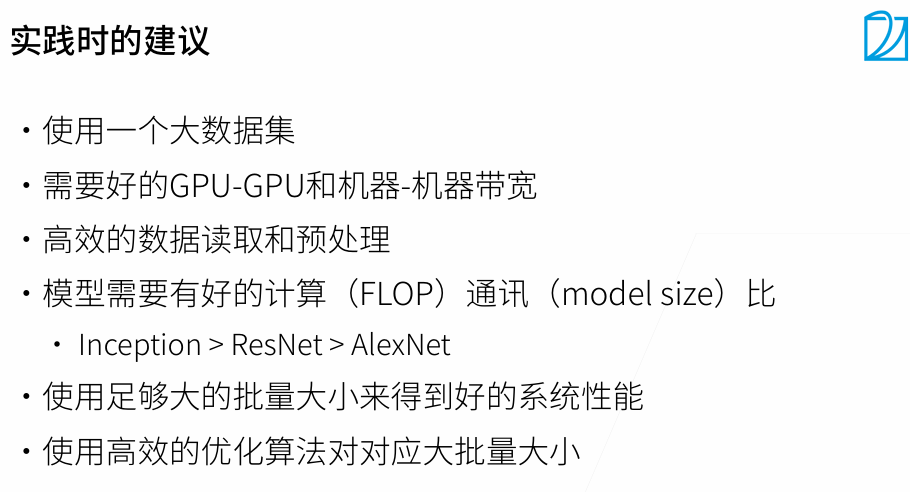
t1最好是大t2 20%左右
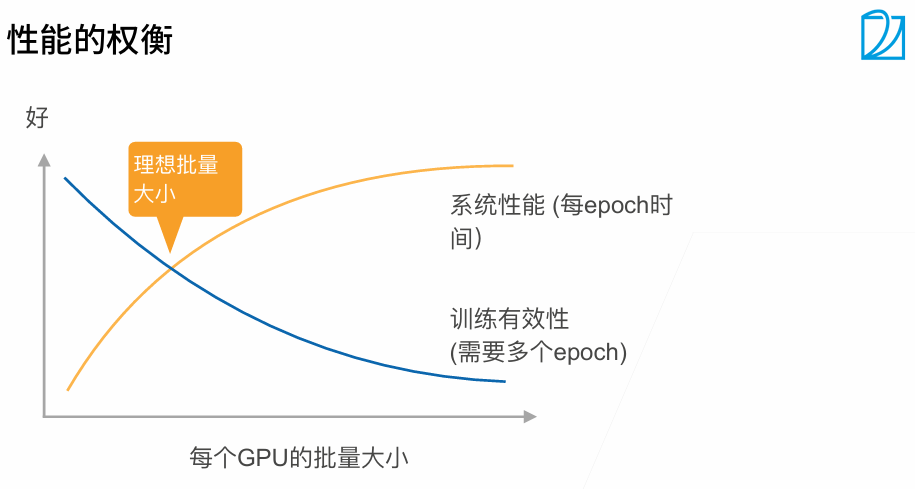
当batchsize变大时,系统性能变好,但是批量越大,需要训练更多epoch达到原始的训练目标
相关文章:
31-35【动手学深度学习】深度学习硬件
1. CPU和GPU 1.1 CPU CPU每秒钟计算的浮点运算数为0.15,GPU为12。GPU的显存很低,16GB(可能32G封顶),CPU可以一直插内存。 左边是GPU(只能做些很简单的游戏,视频处理),中…...

Linux问题排查-内存使用率高如何分析原因
以下是针对 Linux 系统内存使用率高的分步排查方法,结合用户进程占用、tmpfs 内存占用、内核内存泄漏和黑洞内存等特殊情况进行分析: 第一步:初步观察系统整体内存使用情况 1. 查看系统内存概况 命令:free -h 或 cat /proc/mem…...
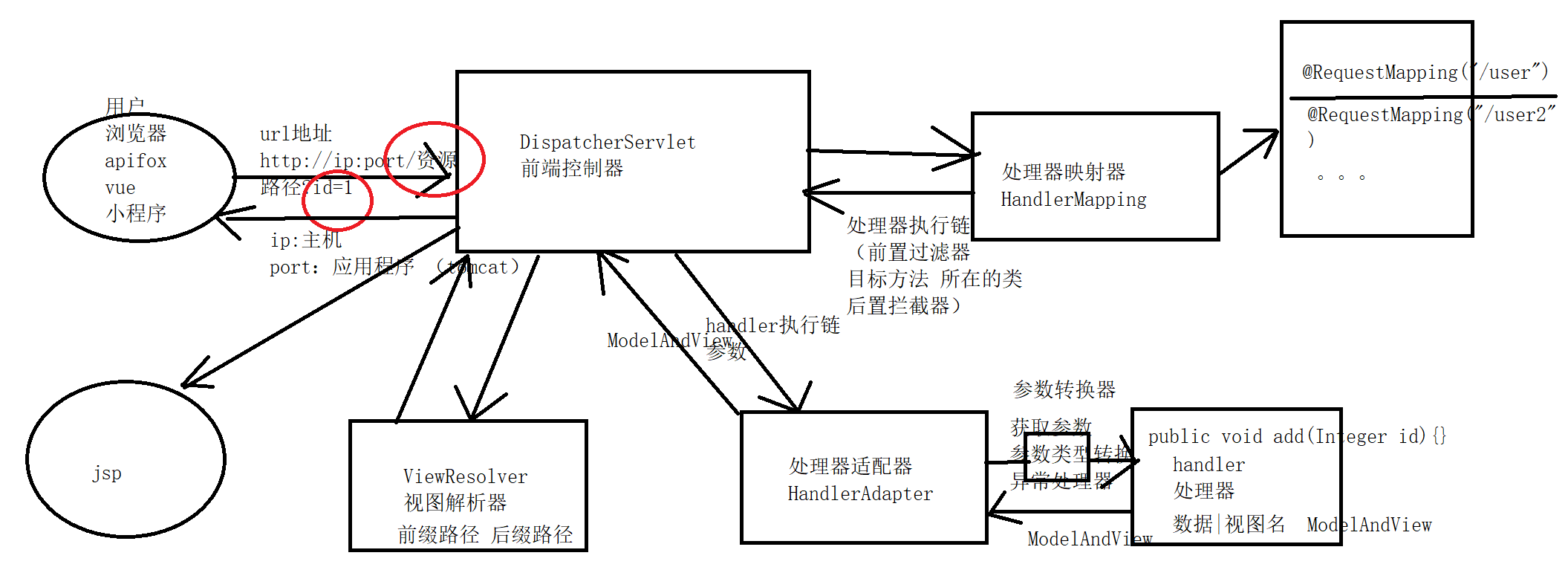
SpringMVC2
一、springmvc 接收请求 类上、方法上 RequestMapping GetMapping PostMapping package com.hl.springmvc02.web; import jdk.nashorn.internal.objects.annotations.Getter; import org.springframework.web.bind.annotation.*; RestController RequestMapping(&qu…...

【每日一题丨2025年5.12~5.18】排序相关题
个人主页:Guiat 归属专栏:每日一题 文章目录 1. 【5.12】P1068 [NOIP 2009 普及组] 分数线划定2. 【5.13】P5143 攀爬者3. 【5.14】P12366 [蓝桥杯 2022 省 Python B] 数位排序4. 【5.15】P10901 [蓝桥杯 2024 省 C] 封闭图形个数5.【5.16】P12165 [蓝桥…...

ElasticSearch性能优化
ES基础概念介绍: 索引:类似于MySQL中的表,它是具有相同特征的一个数据集。文档:格式为JSON格式,类似于MySQL中的一条数据,它是数据存储的基本数据单元,每一条文档都有一个唯一的ID。查询&#x…...
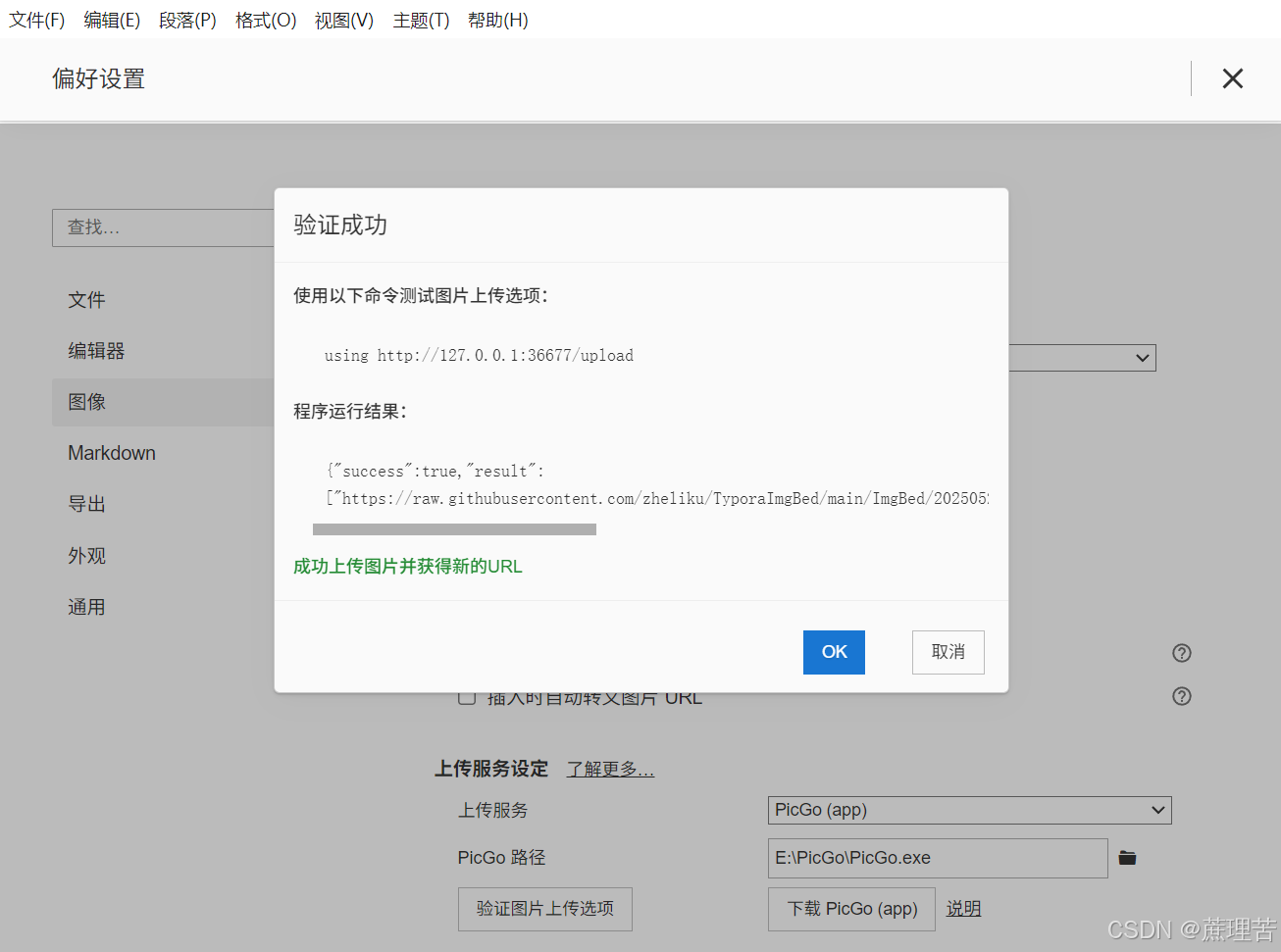
Typora + PicGo + GitHub 配置图床——图片自动上传 详细教程
文章目录 一、创建 GitHub 仓库二、添加私人令牌三、下载 PicGo四、配置 PicGo五、测试 一、创建 GitHub 仓库 进入 Github 官网 注册一个属于自己的账号,点击创建仓库。 2. 创建自己的新仓库。仓库设置为公开,方便上传图片(你设置私有也可以…...

QT+Visual Studio 配置开发环境教程
一、QT架构 Qt Creator 是一个轻量级、跨平台的 IDE,专为 Qt 开发量身打造,内置对 qmake/CMake 的深度支持、Kits 配置管理、原生 QML 调试器以及较低的资源占用维基百科。 而在 Windows 环境下,Visual Studio 配合 Qt VS Tools 扩展则可将 Q…...
缺乏经验的 PCB 过孔建模方法
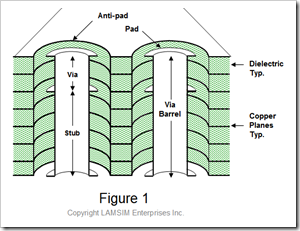
您是一名背板设计人员,被指派设计一种新的高速、多千兆位串行链路架构,从多个线卡到背板上的多个交换矩阵交换卡。这些链路必须在第一天以 6GB/s 的速度运行,并且为 10GB/s (IEEE 802.3KR) 做好产品演进的准备。时间表很紧,您需要提出一个背板架构,以允许程序的其余部分…...

layui 介绍
layui(谐音:类 UI) 是一套开源的 Web UI 解决方案,采用自身经典的模块化规范,并遵循原生 HTML/CSS/JS 的开发方式,极易上手,拿来即用。其风格简约轻盈,而组件优雅丰盈,从源代码到使用…...
【漫话机器学习系列】265.普拉托变换的相关问题(Issues With Platt Scaling)
Platt Scaling 的相关问题详解 | 模型校准中的隐患分析 在机器学习模型中,模型预测的“置信度”并不一定等于真实的概率。为了提高模型预测结果的可解释性和实用性,我们通常会使用一种后处理的概率校准方法——Platt Scaling(普拉托变换&…...
【Linux高级全栈开发】2.2.1 Linux服务器百万并发实现2.2.2 Posix API与网络协议栈
【Linux高级全栈开发】2.2.1 Linux服务器百万并发实现2.2.2 Posix API与网络协议栈 高性能网络学习目录 基础内容(两周完成): 2.1网络编程 2.1.1多路复用select/poll/epoll2.1.2事件驱动reactor2.1.3http服务器的实现 2.2网络原理 百万并发…...

LlamaIndex
1、大语言模型开发框架的价值是什么? SDK:Software Development Kit,它是一组软件工具和资源的集合,旨在帮助开发者创建、测试、部署和维护应用程序或软件。 所有开发框架(SDK)的核心价值,都是降低开发、维护成本。 大语言模型开发框架的价值,是让开发者可以更方便地…...
springboot使用xdoc-report包导出word
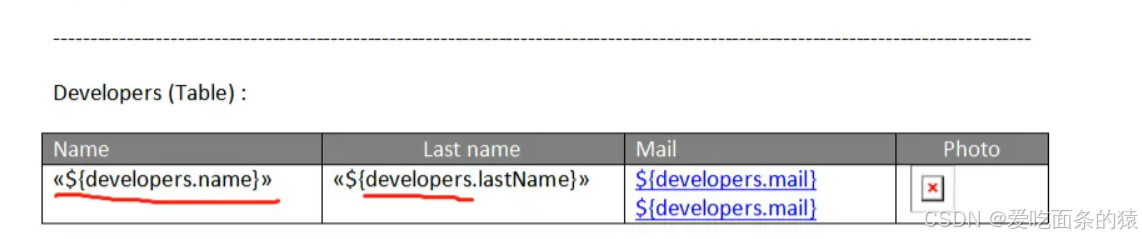
背景:项目需要使用xdoc-report.jar根据设置好的word模版,自动填入数据 导出word 框架使用 我的需求是我做一个模板然后往里面填充内容就导出我想要的word文件,问了下chatgpt还有百度,最后选用了xdocreport这个框架,主…...

leetcode 3356. 零数组变换 II 中等
给定一个长度为 n 的整数数组 nums 和一个二维数组 queries,其中 queries[i] [li, ri]。 对于每个查询 queries[i]: 在 nums 的下标范围 [li, ri] 内选择一个下标 子集。将选中的每个下标对应的元素值减 1。 零数组 是指所有元素都等于 0 的数组。 …...
重拾GMP
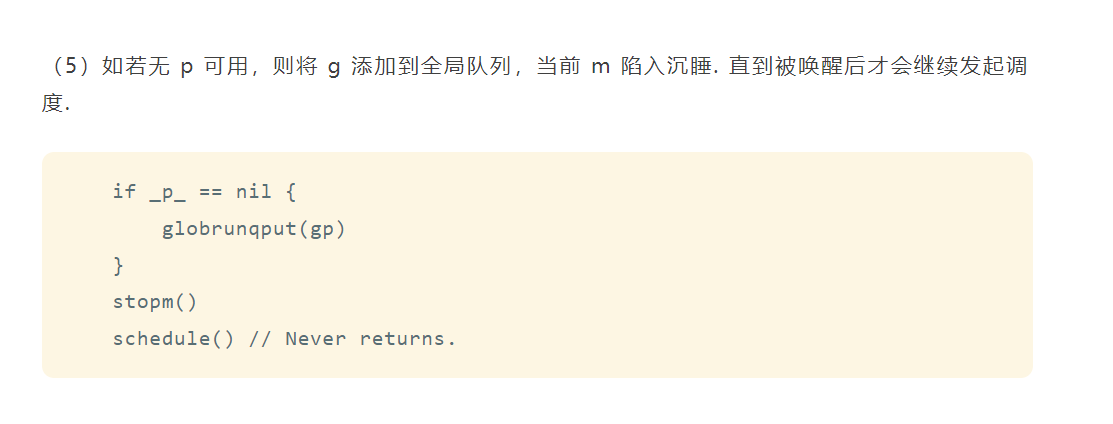
目录 GMP总结 线程协程三家对比GMP调度模型 mgp过一遍流程 g 一个G的生命周期 mpschedt全局队列g0视角看看G的调度流程 四大调度类型 主动调度被动调度正常调度抢占调度 宏观的调度流程上面流程的具体细节 schedule()findRunnable()execute()gosched_m()park_m()与ready()goe…...

实验分享|基于千眼狼sCMOS科学相机的流式细胞仪细胞核成像实验
实验背景 流式细胞仪与微流控技术,为细胞及细胞核成像提供新的路径。传统流式细胞仪在细胞核成像检测方面存在检测通量低,荧光信号微弱等局限,故某光学重点实验室开发一种基于高灵敏度sCMOS科学相机并集成在自组荧光显微镜的微流控细胞核成像…...

C++学习:六个月从基础到就业——C++11/14:其他语言特性
C学习:六个月从基础到就业——C11/14:其他语言特性 本文是我C学习之旅系列的第四十四篇技术文章,也是第三阶段"现代C特性"的第六篇,主要介绍C11/14中引入的其他重要语言特性。查看完整系列目录了解更多内容。 引言 在前…...
【Linux笔记】——线程池项目与线程安全单例模式
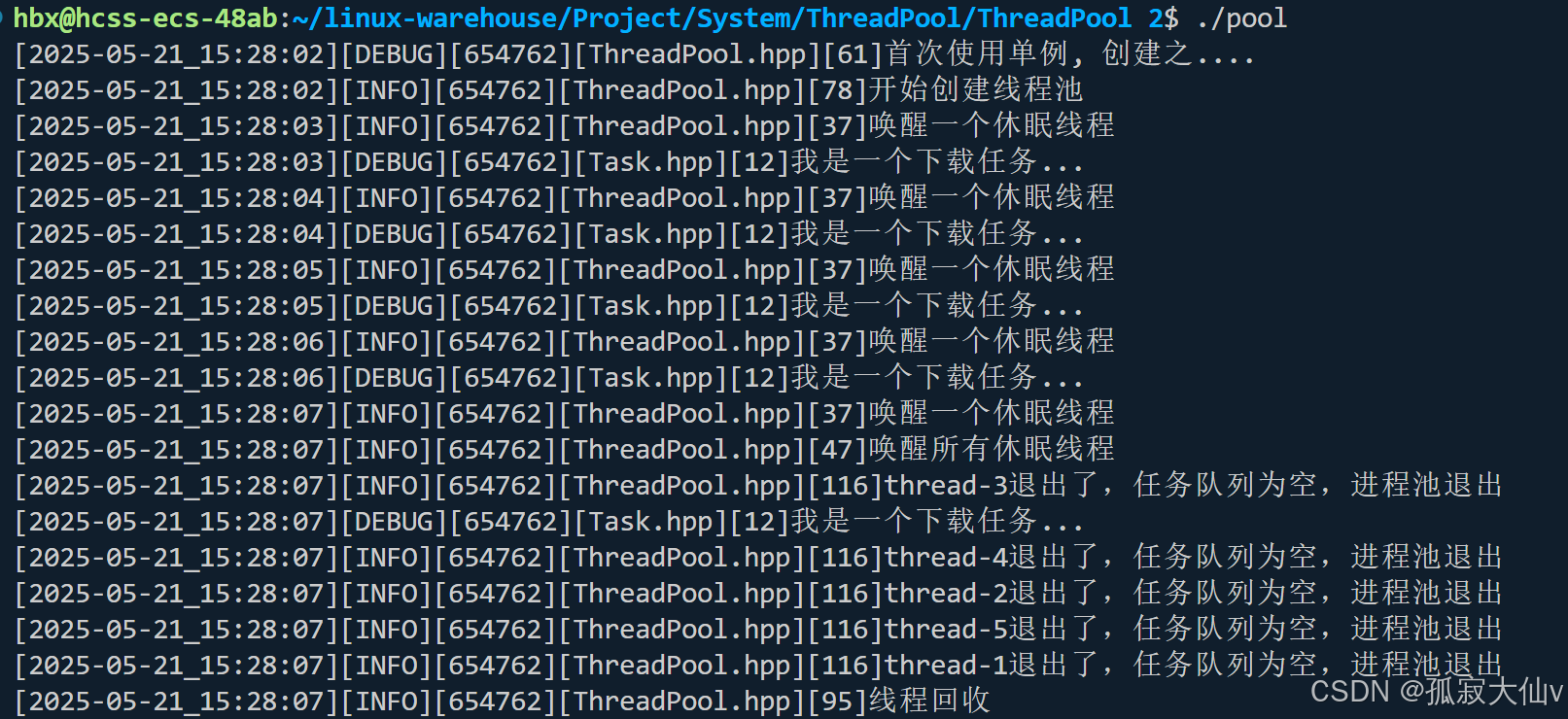
🔥个人主页🔥:孤寂大仙V 🌈收录专栏🌈:Linux 🌹往期回顾🌹: 【Linux笔记】——简单实习一个日志项目 🔖流水不争,争的是滔滔不息 一、线程池设计二…...

数据驱动的社会舆情监测与分析——用算法洞察世界脉动
数据驱动的社会舆情监测与分析——用算法洞察世界脉动 在信息爆炸的时代,社会舆情的变化可以在极短时间内产生深远影响。从企业品牌到公共政策,社交媒体和新闻平台上的讨论能够直接影响决策者的策略制定。因此,数据驱动的舆情监测与分析 逐渐成为政府、企业以及社会机构的重…...

OD 算法题 B卷 【最佳植树距离】
文章目录 最佳植树距离 最佳植树距离 在直线的公路上种树,给定坑位数量和位置,及需要种多少棵树苗;树苗之间的最小距离是多少时,可以保证种的最均匀(树苗之间的最小距离最大); 输入描述&#…...
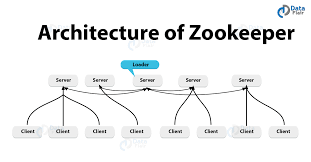
ZooKeeper 原理解析及优劣比较
大家好,这里是架构资源栈!点击上方关注,添加“星标”,一起学习大厂前沿架构! 引言 在分布式系统中,服务注册、配置管理、分布式锁、选举等场景都需要一个高可用、一致性强的协调服务。Apache ZooKeeper 凭…...

实战5:个性化数字艺术生成与销售
盈利思路 数字艺术销售: 平台销售:将生成的数字艺术作品上传到像OpenSea、Foundation等NFT平台进行售卖。每一件独特的艺术品可以通过NFT技术保证其唯一性,吸引收藏家和投资者。 定价策略:根据作品的复杂度、创意性以及市场需求来…...
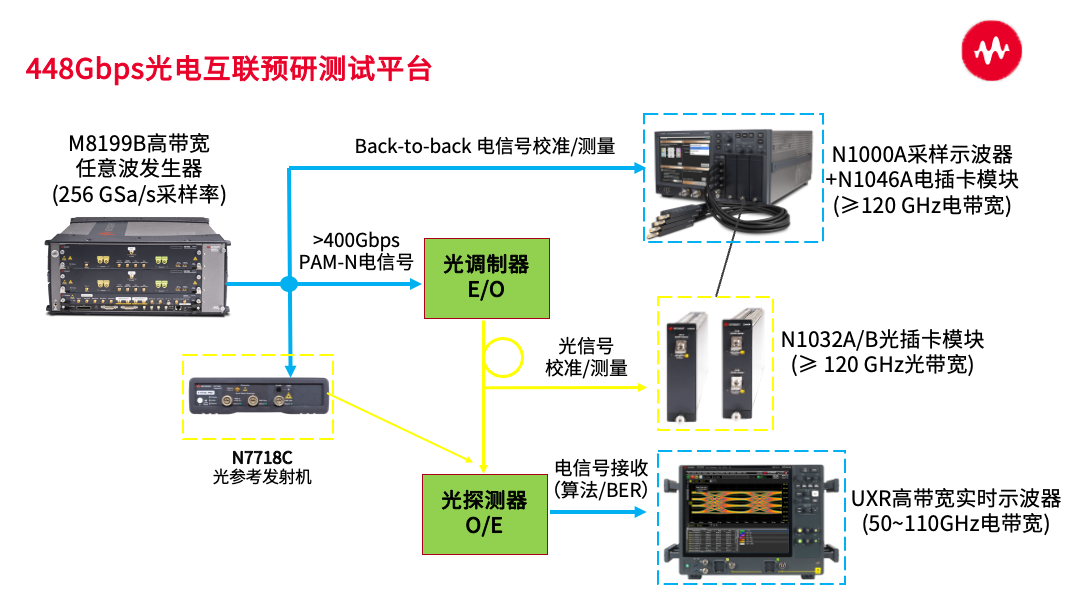
是德科技 | 单通道448G未来之路:PAM4? PAM6? PAM8?
内容来源:是德科技 随着数据中心规模的不断扩大以及AI大模型等技术的兴起,市场对高速、大容量数据传输的需求日益增长。例如,AI训练集群中GPU等设备之间的互联需要更高的传输速率来提升效率。在技术升级方面,SerDes技术的不断进步…...
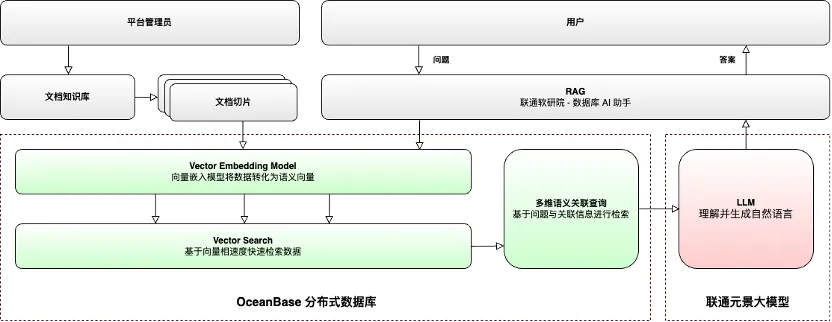
OceanBase 开发者大会,拥抱 Data*AI 战略,构建 AI 数据底座
5 月 17 号以“当 SQL 遇见 AI”为主题的 OceanBase 开发者大会在广州举行,因为行程的原因未能现场参会,仍然通过视频直播观看了全部的演讲。总体来说,这届大会既有对未来数据库演进方向的展望,也有 OceanBase 新产品的发布&#…...
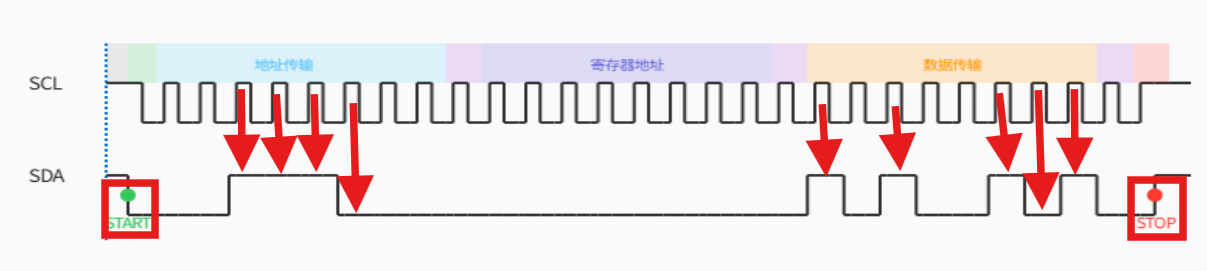
STM32IIC协议基础及Cube配置
STM32IIC协议基础及Cube配置 一,IC协议简介1,核心特点2,应用场景 二,IC协议基础概念1,总线结构2,主从架构3,设备寻址4,起始和停止条件5,数据传输6,应答机制 三…...

CNN vs ViT:图像世界的范式演进
一、图像建模,是不是也可以“大一统” 在前文中我们提到,多模态大模型打破“只能处理文字”的限制。 在 NLP 世界里,Transformer 已经证明自己是理解语言的王者。那么在图像世界,我们是否也能有一种“通用架构”,让模…...
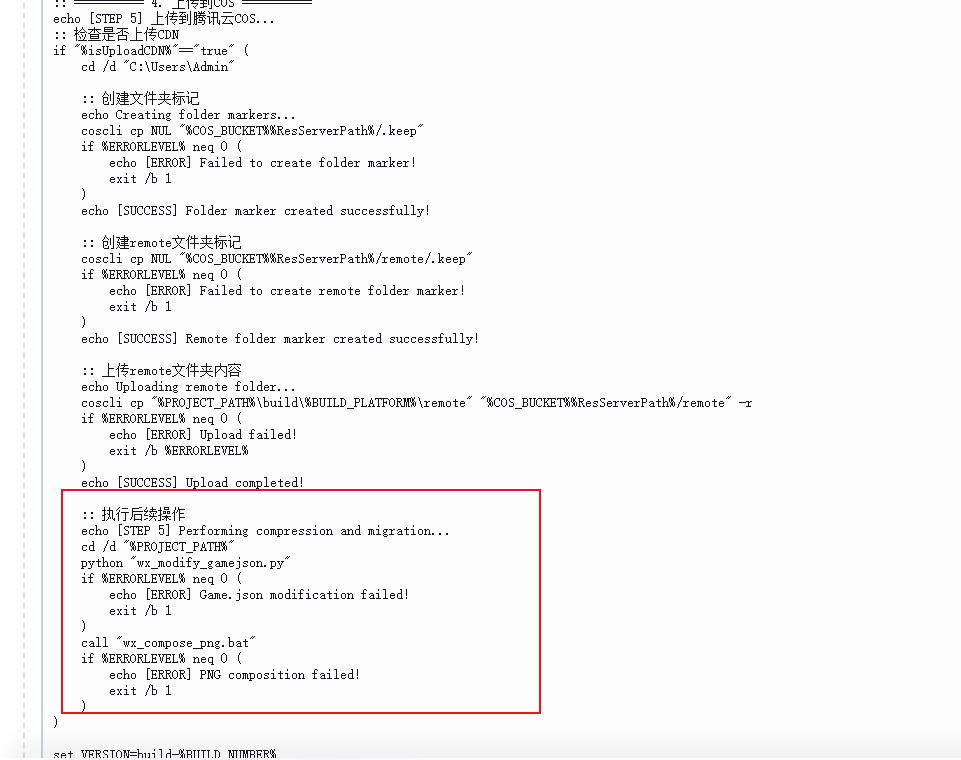
cocos creator使用jenkins打包微信小游戏,自动上传资源到cdn,windows版运行jenkins
cocos 版本2.4.11 在windows上jenkins的具体配置和部署,可参考上一篇文章cocos creator使用jenkins打包流程,打包webmobile_jenkins打包,发布,部署cocoscreator-CSDN博客 特别注意,windows上运行jenkins需要关闭windows自己的jenkins服务&a…...
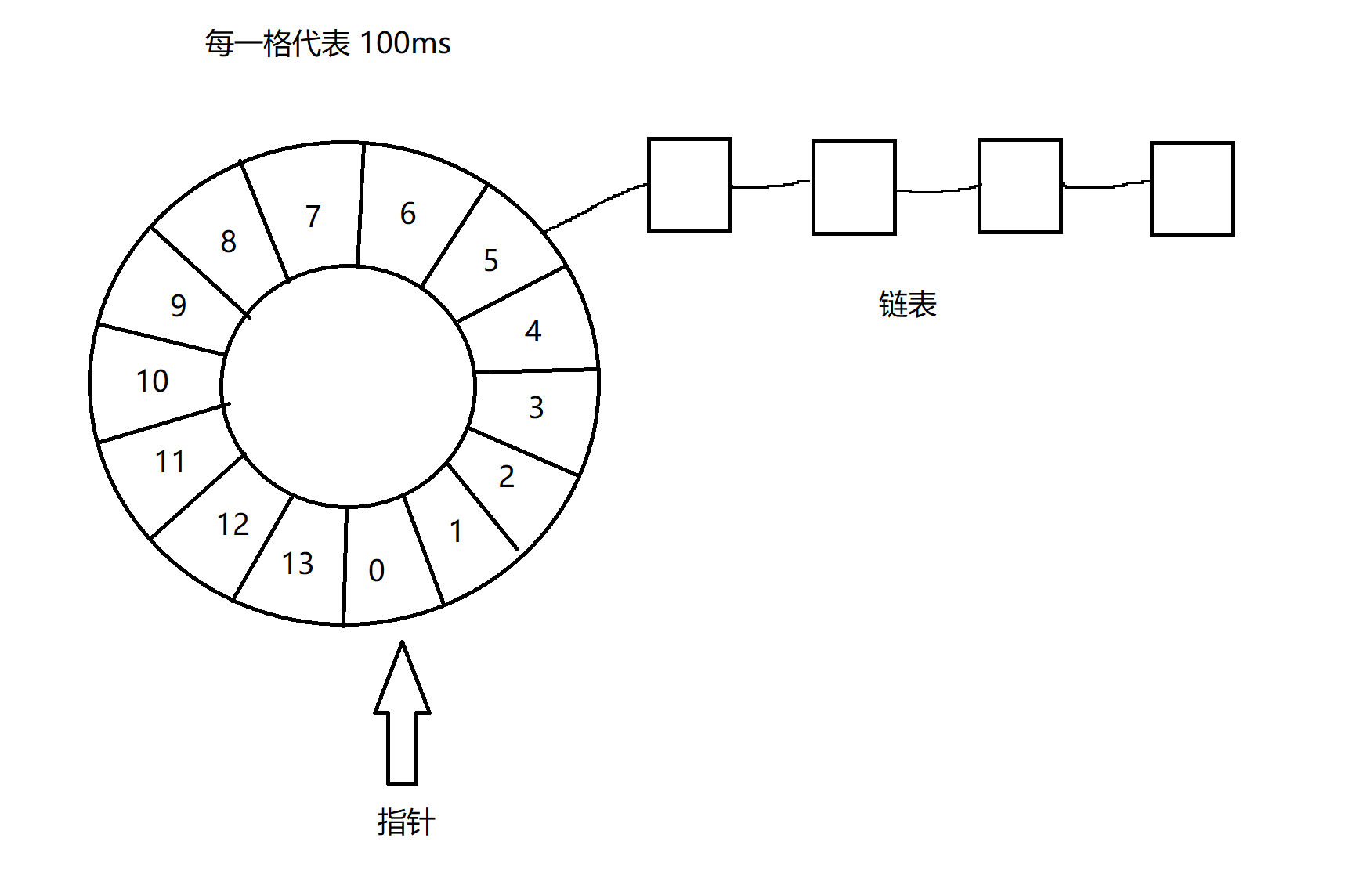
定时器的两种实现方式
1、基于优先级队列/堆 队列是先进先出,优先级队列是优先级越高就存放在队列之前,我们可以将过期时间越早设置为优先级越高,那么临近过期时间的任务就会在队列前面,距离过期时间越晚的任务就在队列后面。 可以分配一个线程&#…...

Python、Pytorch、TensorFlow、Anconda、PySide、Jupyter
一、Python Python是一种高级、通用、解释型的开源编程语言,由Guido van Rossum于1990年代初设计。它具有以下显著特点: 1.语言特性 (1) 语法简洁易读,接近自然语言(如print(“Hello World!”)) (2) 采用强制缩进而非大括号定义代码块 (3) 支持面向对象、函数式和过…...

[Java实战]Spring Boot整合MinIO:分布式文件存储与管理实战(三十)
[Java实战]Spring Boot整合MinIO:分布式文件存储与管理实战(三十) 一、MinIO简介与核心原理 MinIO 是一款高性能、开源的分布式对象存储系统,兼容 Amazon S3 API,适用于存储图片、视频、日志等非结构化数据。其核心特…...