南京邮电大学《智能控制技术》期末抢救(上)
一、智能控制的提出
传统控制方法包括经典控制和现代控制——基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制问题。传统控制方法在实际应用中遇到很多难解决的问题,主要表现以下几点:
(1)实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,无法获得精确的数学模型。
(2)某些复杂的和包含不确定性的控制过程无法用传统的数学模型来描述,即无法解决建模问题。
(3)针对实际系统往往需要进行一些比较苛刻的线性化假设,而这些假设往往与实际系统不符合。
(4)实际控制任务复杂,而传统的控制任务要求低,对复杂的控制任务,如智能机器人控制、社会经济管理系统等无能为力。
智能控制将控制理论的方法和人工智能技术灵活地结合起来,其控制方法适应对象的复杂性和不确定性。
二、智能控制的概念
1.智能控制三元论
智能控制是一门交叉学科,著名美籍华人傅京逊教授1971年首先提出智能控制是人工智能与自动控制的交叉,即二元论。美国学者G.N.Saridis1977年在此基础上引入运筹学,提出了三元论的智能控制概念,即IC=AC ∩ AI ∩ OR。式中各子集的含义为:IC—智能控制(Intelligent Control)、AI—人工智能(Artificial Intelligence),、AC—自动控制(Automatic Control)、OR—运筹学(Operational Research)。
人工智能(AI)是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。自动控制(AC)描述系统的动力学特性,是一种动态反馈。运筹学(OR)是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。
三元论除了“智能”与“控制”外还强调了更高层次控制中调度、规划和管理的作用,为递阶智能控制提供了理论依据。所谓智能控制,即设计一个控制器,使之具有学习、抽象、推理、决策等功能,并能根据环境(包括被控对象或被控过程)信息的变化做出适应性反应,从而实现由“人”来完成的任务。
2.智能控制研究对象特点
智能控制研究对象的特点如下:
1.不确定性的模型: 智能控制适合于不确定性对象的控制,不确定性包括两层意思:一是模型未知或知之甚少;二是模型的结构和参数可能在很大范围内变化。
2.高度的非线性: 采用智能控制方法可以较好地解决非线性系统的控制问题。
3.复杂的任务要求:例如,智能机器人要求控制系统对一个复杂的任务具有自行规划和决策的能力,有自动躲避障碍运动到期望目标位置的能力。
智能控制实际是研究与模拟智能活动,及其控制与信息传递过程的规律,研制具有仿自然智能的工程控制与信息处理系统的一个新兴分支学科。
3.三种类型智能控制系统
(1)人作为控制器的控制系统:人作为控制器的控制系统具有自学习、自适应和自组织的功能;
(2)人—机结合作为控制器的控制系统:机器完成需要连续进行的并需快速计算的常规控制任务,人则完成任务分配、决策、监控等任务;
(3)无人参与的自主控制系统:为多层的智能控制系统,需要完成问题求解和规划、环境建模、传感器信息分析和低层的反馈控制任务。如自主机器人。
4.智能控制算法几大重要分支
(1)模糊控制:采用模糊系统可充分逼近任意复杂的非线性系统,基于模 糊系统逼近的自适应模糊控制是模糊控制的更高形式。
(2)神经网络控制:采用神经网络可充分逼近任意复杂的非线性系统,基于神经网络逼近的自适应神经网络控制是神经网络控制的更高形式。
(3)智能搜索算法:如遗传算法、粒子群算法、差分进化算法等优化算法都是通过模拟自然现象和过程来实现,其优点和机制的独特,为具有搜索问题提供了切实可行的解决方案。
5.智能控制的特点
(1)学习功能:智能控制器能通过从外界环境所获得的信息进行学习,不断积累知识,使系统的控制性能得到改善;
(2)适应功能:智能控制器具有从输入到输出的映射关系,可实现不依赖于模型的自适应控制,当系统某一部分出现故障时,也能进行控制;
(3)自组织功能:智能控制器对复杂的分布式信息具有自组织和协调的功能,当出现多目标冲突时,它可以在任务要求的范围内自行决策,主动采取行动。
(4)优化能力:智能控制能够通过不断优化控制参数和寻找控制器的最佳结构形式,获得整体最优的控制性能。
三、模糊控制
1.模糊控制的特点
(1)模糊控制不需要被控对象的数学模型。
(2)模糊控制是一种反映人类智慧的智能控制方法。
(3)模糊控制易于被人们接受。
(4)实现容易。模糊控制规则易于软件实现。
(5)鲁棒性和适应性好。
2.模糊算子

3.隶属函数

4.模糊推理

常用的有两种模糊条件推理语句(句式):
If A then B else C;If AAND B then C,模糊推理语句“If A AND B then C”确定了三元模糊关系R:
![]()
![]()
T1拉直后需要转秩,T2拉直后无需转秩。
5.隶属函数的确定方法
模糊统计法:根据所提出的模糊概念进行调查统计,提出与之对应的模糊集A,通过统计实验,确定不同元素隶属于A的程度
主观经验法:当论域为离散论域时,可根据主观认识,结合个人经验,经过分析和推理,直接给出隶属度。这种确定隶属函数的方法已经被广泛应用。
神经网络法:利用神经网络的学习功能,由神经网络自动生成隶属函数,并通过网络的学习自动调整隶属函数的值。
四、模糊逻辑控制
1.模糊控制器的组成
(1)模糊化接口(Fuzzy interface)
将定量输入转换为一个模糊矢量
e={负大,负小,零,正小,正大}={NB, NS,ZO, PS, PB}
e={负大,负中,负小,零,正小,正中,正大}={NB, NM, NS, ZO, PS, PM, PB}
e={负大,负中,负小,零负,零正,正小,正中,正大}={NB, NM, NS, NZ,PZ, PS, PM,PB}
(2)知识库(Knowledge Base—KB)
由数据库和规则库两部分构成。
数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值(即经过论域等级离散化以后对应值的集合),若论域为连续域则为隶属度函数。在规则推理的模糊关系方程求解过程中,向推理机提供数据。
规则库是用来存放全部模糊控制规则的,在推理时为“推理机”提供控制规则。模糊规则通常由一系列的关系词连接而成,如if-then、else、also、end、or等,关系词必须经过“翻译”才能将模糊规则数值化。
(3)推理与解模糊接口 (Inference and Defuzzy interface)
推理是模糊控制器中,根据输入模糊量,由模糊控制规则完成模糊推理,并获得模糊控制量的功能部分。Zadeh近似推理,它包含有正向推理和逆向推理两类。正向推理常被用于模糊控制中,而逆向推理一般用于知识工程学领域的专家系统中。
2.模糊控制器(SISO)设计示例(水位)
(1)确定观测量和控制量(输入&输出)
将当前水位对于O点的偏差e作为观测量。
控制量:逻辑阀门开度
(2)输入量和输出量的模糊化


(3)模糊规则的描述
根据日常的经验,设计模糊规则,并用“IF A THEN B”形式来描述,以得到模糊控制表。

(4)求模糊关系
模糊控制规则是一个多条语句,它可以表示为U×V上的模糊子集,即模糊关系R:
R= (NBe× NBu)∪(NSe× NSu)∪(Oe× Ou) ∪ (PSe × PSu) ∪ (PBe×PBu)
其中规则内的模糊集运算取交集,规则间的模糊集运算取并集。
(5)模糊决策
![]()
(6)控制量的反模糊化
即对题意进行解释回答(按照隶属度最大原则找出分子最大项的分母)
3.模糊控制器的常见分类

4.常用的反模糊方法
(1)最大隶属度法
选取推理结果模糊集合中隶属度最大的元素作为输出值,如果在输出论域V中,其最大隶属度对应的输出值多于一个,则取所有具有最大隶属度输出的平均值。最大隶属度法不考虑输出隶属度函数的形状,只考虑最大隶属度处的输出值。因此,难免会丢失许多信息。
(2)重心法
重心法是取隶属度函数曲线与横坐标围成面积的重心为模糊推理的最终输出值。与最大隶属度法相比较,重心法具有更平滑的输出推理控制。即使对应于输入信号的微小变化,输出也会发生变化。
(3)加权平均法
5.模糊自适应整定PID控制

(1)比例系数Kp的作用是调节系统的响应速度、调节精度。Kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。
(2)积分作用系数 Ki的作用是消除系统的稳态误差。Ki越大,系统的静态误差消除越快,但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。
(3)微分作用系数Kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。Kd过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
相关文章:
南京邮电大学《智能控制技术》期末抢救(上)
一、智能控制的提出 传统控制方法包括经典控制和现代控制——基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制问题。传统控制方法在实际应用中遇到很多难解决的问题,主要表现以下几点ÿ…...

Cookie、Session、JWT
目录 实现方式与原理 存储位置 安全性 应用场景 Cookie、Session 和 JWT(JSON Web Token)都是 Web 开发中用于用户身份验证和会话管理的技术,它们在实现方式、存储位置、安全性等方面存在差异: 实现方式与原理 Cookie&#…...

TPDS-2014《Efficient $k$-means++ Approximation with MapReduce》
推荐深蓝学院的《深度神经网络加速:cuDNN 与 TensorRT》,课程面向就业,细致讲解CUDA运算的理论支撑与实践,学完可以系统化掌握CUDA基础编程知识以及TensorRT实战,并且能够利用GPU开发高性能、高并发的软件系统…...

地理特征类可视化图像
目录 一、蜂窝热力地图 1. 特点 (1)优点 (2)缺点 2. 应用场景 3.python代码实现 (1)代码 (2)实现结果 二、变形地图 1. 特点 (1)优点 (2)缺点 2. 应用场景 3.python代码实现 (1)代码 (2)实现结果 三、关联地图 1. 特点 (1)优点 (2)缺点 2. 应用场景 3.pyth…...

【Java高阶面经:微服务篇】8.高可用全链路治理:第三方接口不稳定的全场景解决方案
一、第三方接口治理的核心挑战与架构设计 1.1 不稳定接口的典型特征 维度表现影响范围响应时间P99超过2秒,波动幅度大(如100ms~5s)导致前端超时,用户体验恶化错误率随机返回5xx/429,日均故障3次以上核心业务流程中断,交易失败率上升协议不一致多版本API共存,字段定义不…...
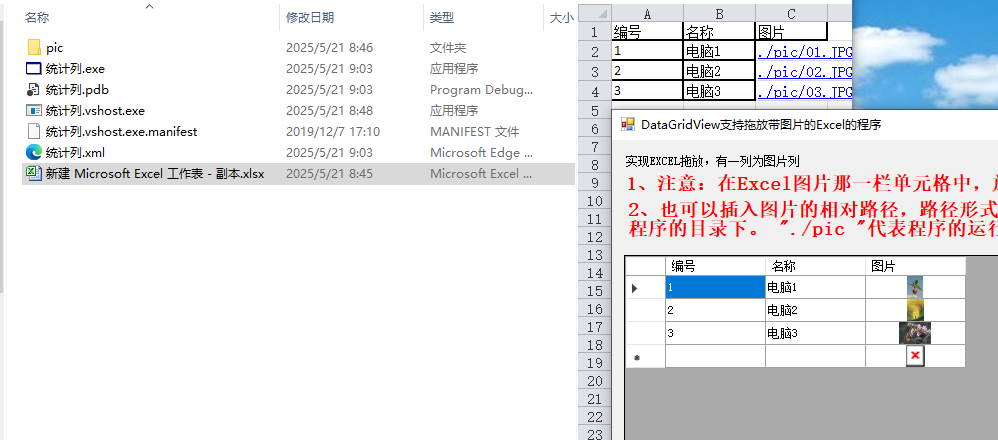
DataGridView中拖放带有图片的Excel,实现数据批量导入
1、带有DataGridView的窗体,界面如下 2、编写DataGridView支持拖放的代码 Private Sub DataGridView1_DragEnter(ByVal sender As Object, ByVal e As DragEventArgs) Handles DataGridView1.DragEnterIf e.Data.GetDataPresent(DataFormats.FileDrop) ThenDim file…...
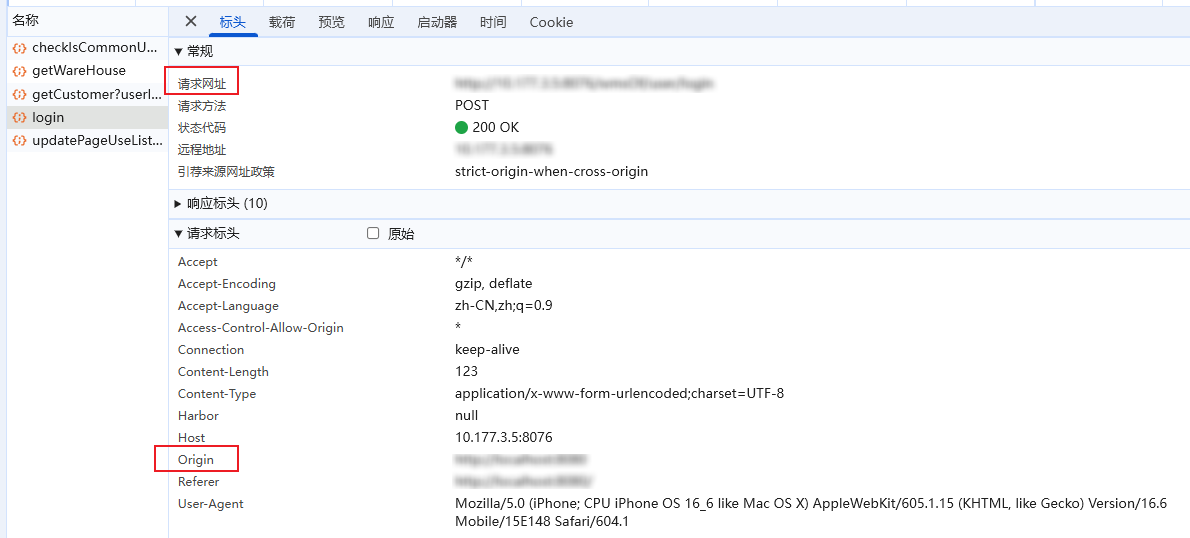
跨域_Cross-origin resource sharing
同源是指"协议域名端口"三者相同,即便两个不同的域名指向同一个ip,也非同源 1.什么是CORS? CORS是一个W3C标准,全称是"跨域资源共享"(Cross-origin resource sharing)。它允许浏览器向跨源服务器ÿ…...

Opencv常见学习链接(待分类补充)
文章目录 1.常见学习链接 1.常见学习链接 1.Opencv中文官方文档 2.Opencv C图像处理:矩阵Mat 随机数RNG 计算耗时 鼠标事件 3.Opencv C图像处理:亮度对比度饱和度高光暖色调阴影漫画效果白平衡浮雕羽化锐化颗粒感 4.OpenCV —— 频率域滤波ÿ…...
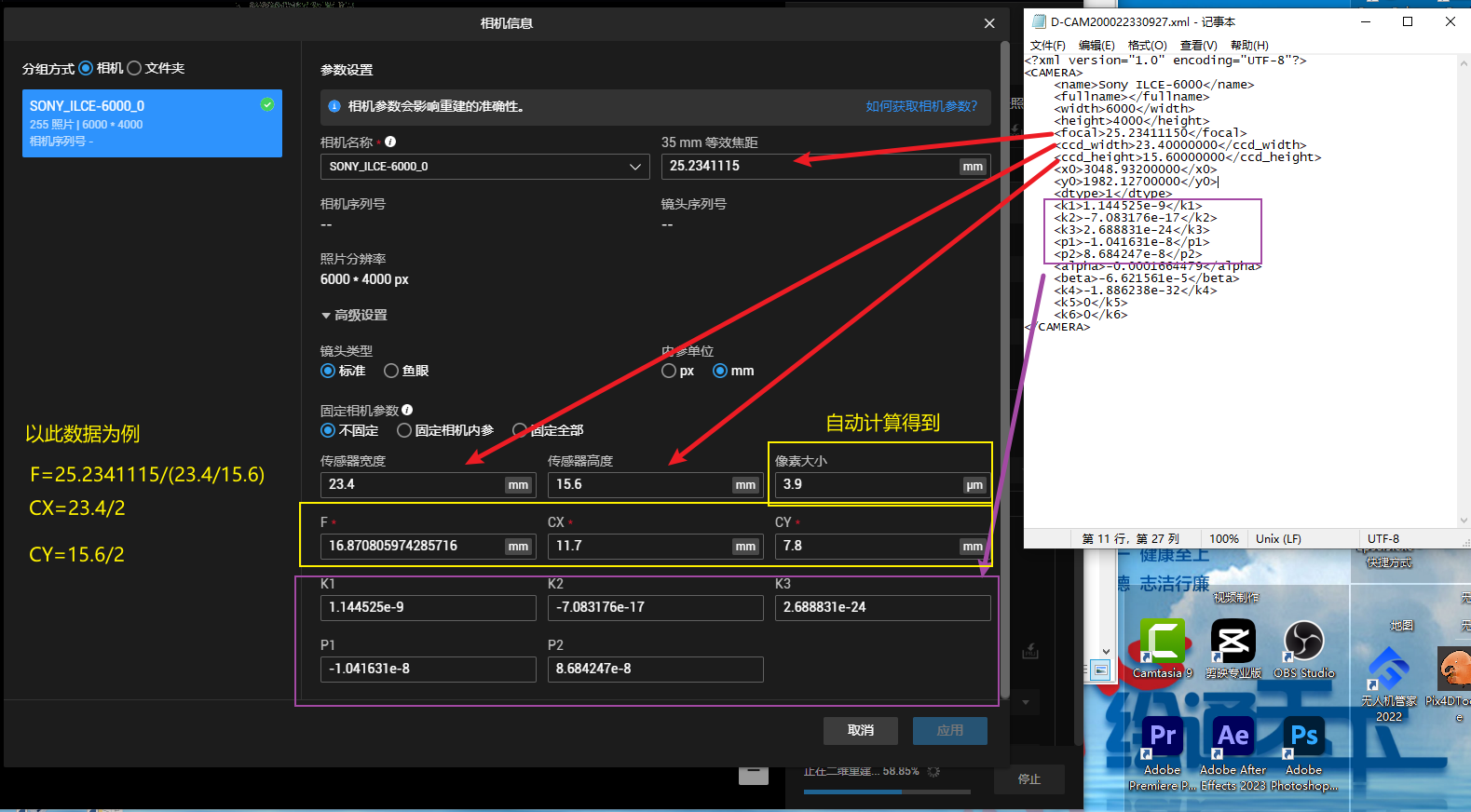
大疆制图跑飞马D2000的正射与三维模型
1 问题描述 大疆制图在跑大疆无人机飞的影像的时候,能够自动识别相机参数并且影像自带pos信息,但是用飞马无人机获取的影像pos信息与影像是分开的(飞马无人机数据处理有讲),所以在用大疆制图时需要对相机参数进行设置…...

PostgreSQL中的权限管理简介
在 PostgreSQL 中,权限管理是非常重要的,它允许管理员控制用户对数据库对象的访问权限。其中,权限管理是通过角色和权限来实现的。角色可以是用户、组或者其他角色,而权限则控制了角色对数据库对象的访问权限。 1.用户和角色 在…...
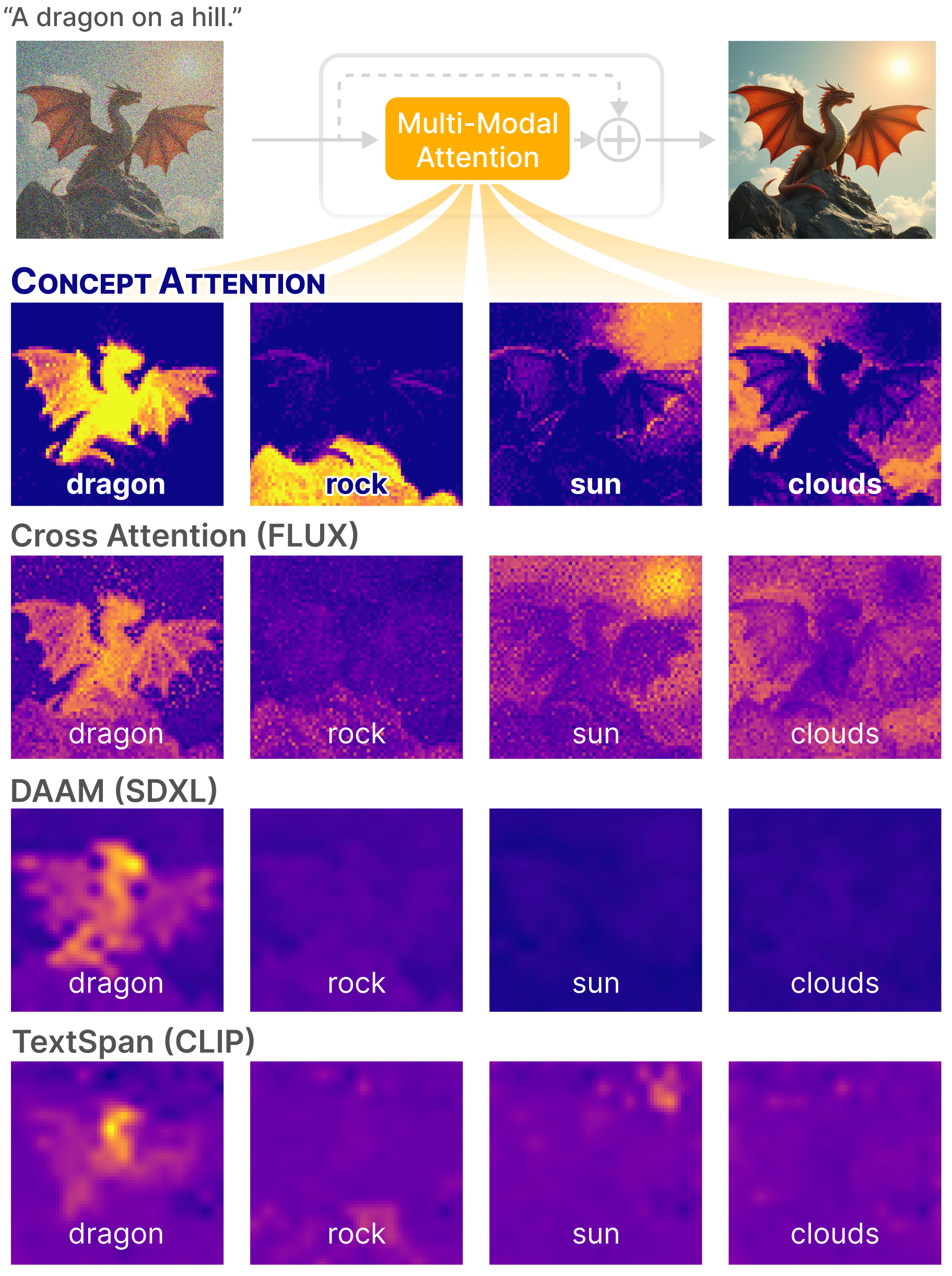
ConceptAttention:Diffusion Transformers learn highly interpretable features
ConceptAttention: Diffusion Transformers Learn Highly Interpretable Featureshttps://arxiv.org/html/2502.04320?_immersive_translate_auto_translate=1用flux的attention来做图文的显著性分析。 1.i...
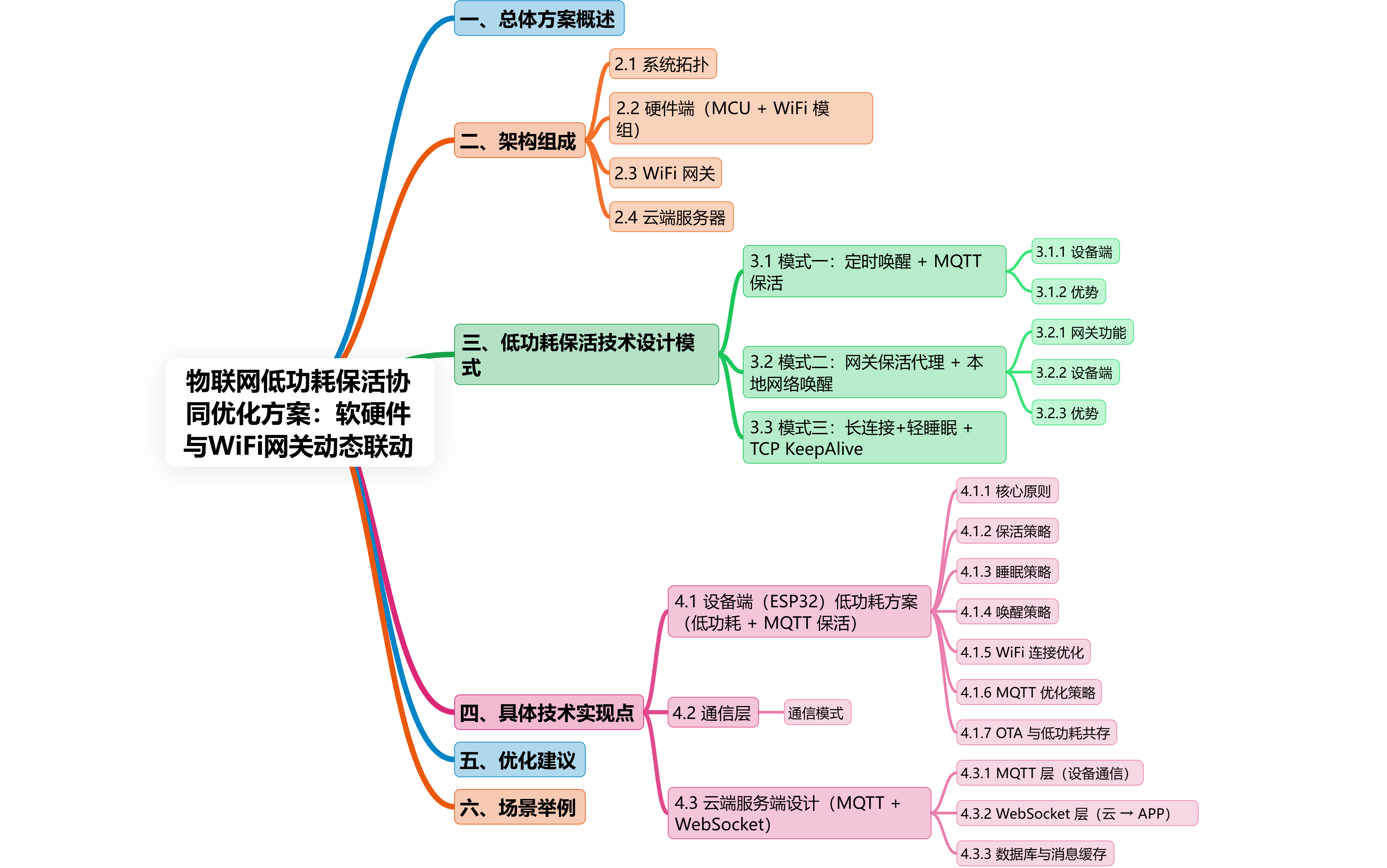
物联网低功耗保活协同优化方案:软硬件与WiFi网关动态联动
目录 一、总体方案概述 二、架构组成 2.1 系统拓扑 2.2 硬件端(MCU + WiFi 模组) 2.3 WiFi 网关 2.4 云端服务器 三、低功耗保活技术设计模式 3.1 模式一:定时唤醒 + MQTT 保活 3.1.1 设备端 3.1.2 优势 3.2 模式二:网关保活代理 + 本地网络唤醒 3.2.1 网关功能…...
LW-CTrans:一种用于三维医学图像分割的轻量级CNN与Transformer混合网络|文献速递-深度学习医疗AI最新文献
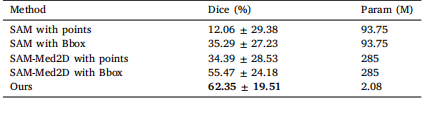
Title 题目 LW-CTrans: A lightweight hybrid network of CNN and Transformer for 3Dmedical image segmentation LW-CTrans:一种用于三维医学图像分割的轻量级CNN与Transformer混合网络 01 文献速递介绍 三维医学图像分割旨在从计算机断层扫描(CT…...
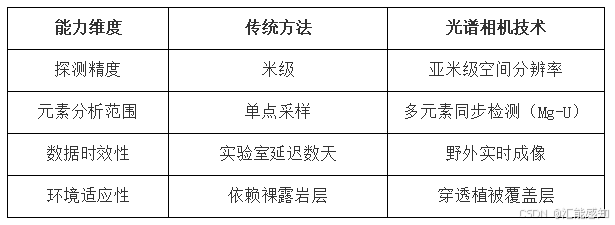
光谱相机在地质勘测中的应用
一、矿物识别与蚀变带分析 光谱特征捕捉 通过可见光至近红外(400-1000nm)的高光谱分辨率(可达3.5nm),精确识别矿物的“光谱指纹”。例如: 铜矿:在400-500nm波段反射率显著低于围…...

Autodl训练Faster-RCNN网络(自己的数据集)
参考文章: Autodl服务器中Faster-rcnn(jwyang)复现(一)_autodl faster rcnn-CSDN博客 Autodl服务器中Faster-rcnn(jwyang)训练自己数据集(二)_faster rcnn autodl-CSDN博客 环境配置 我到下载torch这一步老是即将结束的时候自动结束进程,所以还是自己…...
)
每日两道leetcode(今天开始刷基础题模块——这次是之前的修改版)
1768. 交替合并字符串 - 力扣(LeetCode) 题目 给你两个字符串 word1 和 word2 。请你从 word1 开始,通过交替添加字母来合并字符串。如果一个字符串比另一个字符串长,就将多出来的字母追加到合并后字符串的末尾。 返回 合并后的…...
)
服务器数据迁移终极指南:网站、数据库、邮件无缝迁移策略与工具实战 (2025)
嘿,各位服务器的“大管家”们!咱们在IT江湖闯荡,总有那么些时候,不得不面对一个既重要又可能让人头皮发麻的任务——服务器迁移!可能是因为旧服务器“年事已高”想给它换个“新家”,也可能是业务发展太快&a…...
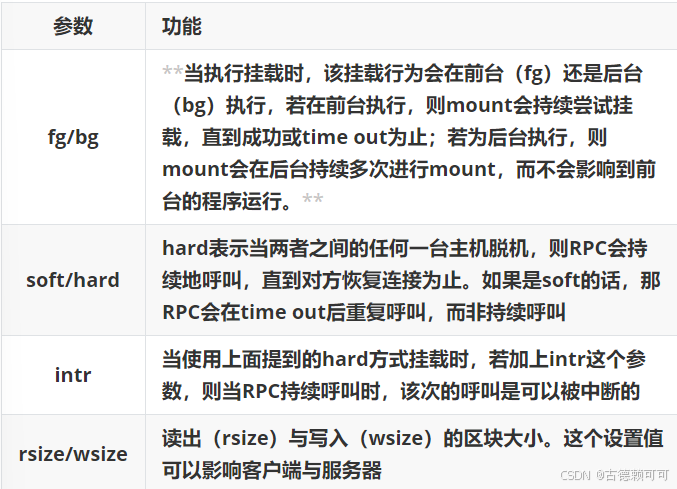
NFS服务小实验
实验1 建立NFS服务器,使的客户端顺序共享数据 第一步:服务端及客户端的准备工作 # 恢复快照 [rootserver ~]# setenforce 0 [rootserver ~]# systemctl stop firewalld [rootserver ~]# yum install nfs-utils -y # 服务端及客户端都安装 …...

vue 中的v-once
🔰 基础理解 ✅ 语法: <span v-once>{{ msg }}</span>✅ 效果: • 只渲染一次,之后无论数据如何变化,该内容都不会更新。 • 非常适用于静态内容或首次加载后不需要变化的数据。🧪 示例&…...
鸿蒙ArkTS-发请求第三方接口显示实时新闻列表页面
发请求展示新闻列表 鸿蒙ArkTS-发请求第三方接口显示实时新闻列表页面 1. 效果图 新闻首页: 点击某一新闻的详情页面(需要使用模拟器才能查看详情页面): 2. 代码 1. key准备 首先需求到聚合网申请一个key,网址如下…...

2025年开源大模型技术全景图
迈向2025年,开源大型语言模型(LLM)生态系统已不再仅仅是闭源模型的补充,而是成为推动AI创新与民主化的核心引擎。其技术全景展现了一个高度模块化、协作共生且快速演进的复杂网络。以下是对提供的蓝图进行更细致的解读,…...

【创造型模式】工厂方法模式
文章目录 工厂方法模式工厂方法模式当中的角色和职责工厂方法模式的实现工厂方法模式的优缺点 工厂方法模式 今天我们继续学习一例创造型设计模式——工厂方法模式。参考的主要资料是刘丹冰老师的《Easy 搞定 Golang 设计模式》。 工厂方法模式当中的角色和职责 简单来说&…...
【MySQL】使用文件进行交互
目录 准备工作 1.从文本文件中读取数据(导入) 1.1.CSV 文件 1.2.设置导入导出的路径 1.3.导入文件 1.4.将数据写入文本文件(导出) 2.从文件中读取并执行SQL命令 2.1.通过mysql监视器执行编写在文件里面的SQL语句 2.2.通过…...
# 大模型的本地部署与应用:从入门到实战
大模型的本地部署与应用:从入门到实战 在当今人工智能飞速发展的时代,大模型(尤其是大型语言模型,LLMs)已经成为自然语言处理(NLP)领域的核心力量。从文本生成、机器翻译到问答系统,…...

布丁扫描高级会员版 v3.5.2.2| 安卓智能扫描 APP OCR文字识别小助手
布丁扫描高级会员版 v3.5.2.2| 安卓智能扫描 APP OCR文字识别小助手 布丁扫描APP是一款集成了先进图像处理与OCR文字识别技术的智能扫描软件。它旨在将纸质文档、照片、名片、书籍等各类实体资料快速…...

可视化大屏全屏后重载echarts图表
问题:可视化大屏点击全屏之后,但echarts图表还是之前的大小,并没有撑满该容器,所以这时候我们需要全屏之后重新加载echarts图表内容 代码如下: // 全屏或非全屏状态下重新加载图表window.onresize () > {//lineCh…...

20200201工作笔记常用命令要整理
工作笔记常用命令: 1.repo常用命令: repo sync -c -j10 2. 常用adb命令 错误: error: device unauthorized. This adbds $ADB_VENDOR_KEYS is not set; try adb kill-server if that seems wrong. Otherwise check for a confirmation dialog on your d…...

Java对象内存模型、如何判定对象已死亡?
一、Java对象内存模型 Java对象在内存中由三部分组成: 含类元数据指针(指向方法区的Class对象)和Mark Word(存储对象哈希码、锁状态、GC分代年龄等信息)。 若为数组对象,还包含数组长度数据。 1,…...

spark任务的提交流程
目录 spark任务的提交流程1. 资源申请与初始化2. 任务划分与调度3. 任务执行4. 资源释放与结果处理附:关键组件协作示意图扩展说明SparkContext介绍 spark任务的提交流程 用户创建一个 Spark Context;Spark Context 去找 Cluster Manager 申请资源同时说明需要多少 CPU 和内…...

ELK简介和docker版安装
使用场景 主要还是给开发人员“打捞日志”用的。 ELK 是由三个开源工具组成的套件(Elasticsearch、Logstash 和 Kibana),主要用于日志的收集、分析和可视化。以下是 ELK 常见的使用场景: 日志集中化管理 收集来自多个服务器或服…...