python 实现一个完整的基于Python的多视角三维重建系统,包含特征提取与匹配、相机位姿估计、三维重建、优化和可视化等功能
多视角三维重建系统
下面我将实现一个完整的基于Python的多视角三维重建系统,包含特征提取与匹配、相机位姿估计、三维重建、优化和可视化等功能。
1. 环境准备与数据加载
首先安装必要的库:
pip install opencv-python opencv-contrib-python numpy matplotlib plotly scipy
import cv2
import numpy as np
import matplotlib.pyplot as plt
from scipy.sparse import lil_matrix
from scipy.optimize import least_squares
import os
from mpl_toolkits.mplot3d import Axes3D
import plotly.graph_objects as go
import time
from tqdm import tqdmclass MultiViewReconstruction:def __init__(self, image_dir, focal_length=2000, principal_point=None):"""初始化多视角三维重建系统参数:image_dir: 图像目录路径focal_length: 相机焦距(像素单位)principal_point: 主点坐标(cx, cy), 默认为图像中心"""self.image_dir = image_dirself.images = []self.image_names = []self.focal_length = focal_lengthself.principal_point = principal_pointself.keypoints = []self.descriptors = []self.matches = {}self.camera_poses = {} # 相机位姿字典 {image_id: (R, t)}self.point_cloud = [] # 三维点云 [(x, y, z, r, g, b), ...]self.point_visibility = {} # 点可见性 {point_id: [image_id1, image_id2, ...]}# 加载图像self._load_images()# 如果没有指定主点,使用图像中心if self.principal_point is None:h, w = self.images[0].shape[:2]self.principal_point = (w/2, h/2)# 相机内参矩阵self.K = np.array([[self.focal_length, 0, self.principal_point[0]],[0, self.focal_length, self.principal_point[1]],[0, 0, 1]])def _load_images(self):"""加载目录中的所有图像"""print("Loading images...")for img_name in sorted(os.listdir(self.image_dir)):if img_name.lower().endswith(('.png', '.jpg', '.jpeg')):img_path = os.path.join(self.image_dir, img_name)img = cv2.imread(img_path)if img is not None:self.images.append(img)self.image_names.append(img_name)print(f"Loaded {len(self.images)} images.")
2. 特征提取与匹配
def extract_features(self, method='SIFT', n_features=5000):"""从所有图像中提取特征点参数:method: 特征提取方法 ('SIFT', 'SURF', 'ORB')n_features: 要提取的最大特征点数"""print(f"Extracting features using {method}...")# 选择特征提取器if method == 'SIFT':detector = cv2.SIFT_create(nfeatures=n_features)elif method == 'SURF':detector = cv2.xfeatures2d.SURF_create(hessianThreshold=400)elif method == 'ORB':detector = cv2.ORB_create(nfeatures=n_features)else:raise ValueError(f"Unsupported feature method: {method}")self.keypoints = []self.descriptors = []for img in tqdm(self.images):# 转换为灰度图gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 检测特征点和计算描述子kp, des = detector.detectAndCompute(gray, None)self.keypoints.append(kp)self.descriptors.append(des)def match_features(self, method='FLANN', ratio_test=0.7):"""匹配不同图像之间的特征点参数:method: 匹配方法 ('FLANN' 或 'BF')ratio_test: Lowe's ratio test的阈值"""print("Matching features between images...")# 初始化匹配器if method == 'FLANN':if self.descriptors[0].dtype == np.uint8: # ORB描述子flann_params = dict(algorithm=6, # FLANN_INDEX_LSHtable_number=6,key_size=12,multi_probe_level=1)matcher = cv2.FlannBasedMatcher(flann_params, {})else: # SIFT/SURF描述子flann_params = dict(algorithm=1, trees=5) # FLANN_INDEX_KDTREEmatcher = cv2.FlannBasedMatcher(flann_params, {})elif method == 'BF':if self.descriptors[0].dtype == np.uint8: # ORB描述子matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=False)else: # SIFT/SURF描述子matcher = cv2.BFMatcher(cv2.NORM_L2, crossCheck=False)else:raise ValueError(f"Unsupported matching method: {method}")self.matches = {}n_images = len(self.images)# 匹配所有图像对for i in tqdm(range(n_images)):for j in range(i+1, n_images):# 匹配描述子matches = matcher.knnMatch(self.descriptors[i], self.descriptors[j], k=2)# 应用Lowe's ratio test筛选好的匹配good_matches = []for m, n in matches:if m.distance < ratio_test * n.distance:good_matches.append(m)if len(good_matches) > 20: # 只保留足够多的匹配对self.matches[(i, j)] = good_matchesdef visualize_matches(self, img_idx1, img_idx2):"""可视化两个图像之间的匹配点"""if (img_idx1, img_idx2) not in self.matches:print(f"No matches found between image {img_idx1} and {img_idx2}")returnimg1 = self.images[img_idx1]img2 = self.images[img_idx2]matches = self.matches[(img_idx1, img_idx2)]# 绘制匹配结果matched_img = cv2.drawMatches(img1, self.keypoints[img_idx1],img2, self.keypoints[img_idx2],matches, None,flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)plt.figure(figsize=(20, 10))plt.imshow(cv2.cvtColor(matched_img, cv2.COLOR_BGR2RGB))plt.title(f"Feature matches between image {img_idx1} and {img_idx2}")plt.axis('off')plt.show()
3. 相机位姿估计与三维重建
def estimate_initial_pose(self):"""估计初始相机位姿"""print("Estimating initial camera poses...")if not self.matches:raise ValueError("No feature matches found. Run match_features() first.")# 选择有最多匹配点的图像对作为初始对best_pair = max(self.matches.keys(), key=lambda x: len(self.matches[x]))img_idx1, img_idx2 = best_pairmatches = self.matches[best_pair]# 获取匹配点的像素坐标kp1 = self.keypoints[img_idx1]kp2 = self.keypoints[img_idx2]pts1 = np.float32([kp1[m.queryIdx].pt for m in matches])pts2 = np.float32([kp2[m.trainIdx].pt for m in matches])# 计算基础矩阵和本质矩阵E, mask = cv2.findEssentialMat(pts1, pts2, self.K, method=cv2.RANSAC, prob=0.999, threshold=1.0)# 从本质矩阵恢复相对位姿_, R, t, mask = cv2.recoverPose(E, pts1, pts2, self.K, mask=mask)# 设置第一个相机的位姿为世界坐标系self.camera_poses[img_idx1] = (np.eye(3), np.zeros((3, 1))) # R, tself.camera_poses[img_idx2] = (R, t)# 三角测量初始点云self._triangulate_initial_points(img_idx1, img_idx2)# 逐步添加更多视图self._incremental_sfm()def _triangulate_initial_points(self, img_idx1, img_idx2):"""三角测量初始点云"""matches = self.matches[(img_idx1, img_idx2)]kp1 = self.keypoints[img_idx1]kp2 = self.keypoints[img_idx2]# 获取匹配点的像素坐标pts1 = np.float32([kp1[m.queryIdx].pt for m in matches])pts2 = np.float32([kp2[m.trainIdx].pt for m in matches])# 获取相机投影矩阵R1, t1 = self.camera_poses[img_idx1]R2, t2 = self.camera_poses[img_idx2]P1 = np.dot(self.K, np.hstack((R1, t1)))P2 = np.dot(self.K, np.hstack((R2, t2)))# 三角测量points_4d = cv2.triangulatePoints(P1, P2, pts1.T, pts2.T)points_3d = points_4d[:3] / points_4d[3] # 齐次坐标转3D坐标# 获取点的颜色colors = []img1 = self.images[img_idx1]for pt in pts1:x, y = int(round(pt[0])), int(round(pt[1]))colors.append(img1[y, x][::-1]) # BGR转RGB# 保存点云for i in range(points_3d.shape[1]):self.point_cloud.append((*points_3d[:, i], *colors[i]))point_id = len(self.point_cloud) - 1self.point_visibility[point_id] = [img_idx1, img_idx2]def _incremental_sfm(self):"""增量式运动恢复结构"""print("Running incremental structure from motion...")n_images = len(self.images)registered_images = set(self.camera_poses.keys())# 继续添加视图直到所有视图都注册while len(registered_images) < n_images:# 找到与已注册视图有最多匹配点的未注册视图best_img = Nonebest_matches = 0best_registered_img = Nonebest_matches_list = []for unreg_img in set(range(n_images)) - registered_images:for reg_img in registered_images:pair = (min(unreg_img, reg_img), max(unreg_img, reg_img))if pair in self.matches and len(self.matches[pair]) > best_matches:best_matches = len(self.matches[pair])best_img = unreg_imgbest_registered_img = reg_imgbest_matches_list = self.matches[pair]if best_img is None:print("No more images can be registered")breakprint(f"Registering image {best_img} using matches with image {best_registered_img}")# 2D-3D对应关系kp_reg = self.keypoints[best_registered_img]kp_unreg = self.keypoints[best_img]# 找到已重建的3D点pts3d = []pts2d = []colors = []for match in best_matches_list:# 在已注册图像中找到对应的3D点point_found = Falsefor point_id, img_list in self.point_visibility.items():if best_registered_img in img_list:# 检查是否是同一个特征点img_pos = img_list.index(best_registered_img)kp_idx = match.queryIdx if img_pos == 0 else match.trainIdx# 这里简化处理,实际应该建立特征点与3D点的对应关系# 为了简化,我们假设匹配是正确的pts3d.append(self.point_cloud[point_id][:3])pts2d.append(kp_unreg[match.trainIdx if img_pos == 0 else match.queryIdx].pt)colors.append(self.point_cloud[point_id][3:6])point_found = Truebreakif not point_found:continueif len(pts3d) < 6:print(f"Not enough 2D-3D correspondences for image {best_img}")registered_images.add(best_img) # 标记为已注册但无法重建continuepts3d = np.array(pts3d, dtype=np.float32)pts2d = np.array(pts2d, dtype=np.float32)# 使用PnP算法估计新视图的相机位姿_, rvec, tvec, inliers = cv2.solvePnPRansac(pts3d, pts2d, self.K, None,iterationsCount=1000,reprojectionError=8.0,confidence=0.99)# 转换旋转向量为旋转矩阵R, _ = cv2.Rodrigues(rvec)t = tvec# 保存新视图的相机位姿self.camera_poses[best_img] = (R, t)registered_images.add(best_img)# 三角测量新的点self._triangulate_new_points(best_img, registered_images)def _triangulate_new_points(self, new_img_idx, registered_images):"""三角测量新的3D点"""# 找到与新视图有匹配的已注册视图for reg_img in registered_images:if reg_img == new_img_idx:continuepair = (min(new_img_idx, reg_img), max(new_img_idx, reg_img))if pair not in self.matches:continuematches = self.matches[pair]kp_new = self.keypoints[new_img_idx]kp_reg = self.keypoints[reg_img]# 获取匹配点pts_new = []pts_reg = []match_indices = []for i, match in enumerate(matches):# 检查这些匹配点是否已经存在于点云中exists = Falsefor point_id, img_list in self.point_visibility.items():if reg_img in img_list:# 简化处理,实际应该建立特征点与3D点的对应关系img_pos = img_list.index(reg_img)kp_idx = match.queryIdx if img_pos == 0 else match.trainIdx# 如果这个特征点已经有对应的3D点,跳过exists = Truebreakif not exists:# 新点,准备三角测量query_pt = kp_reg[match.queryIdx].pttrain_pt = kp_new[match.trainIdx].ptpts_reg.append(query_pt)pts_new.append(train_pt)match_indices.append(i)if len(pts_new) < 8:continuepts_new = np.float32(pts_new).Tpts_reg = np.float32(pts_reg).T# 获取相机投影矩阵R_reg, t_reg = self.camera_poses[reg_img]R_new, t_new = self.camera_poses[new_img_idx]P_reg = np.dot(self.K, np.hstack((R_reg, t_reg)))P_new = np.dot(self.K, np.hstack((R_new, t_new)))# 三角测量新点points_4d = cv2.triangulatePoints(P_reg, P_new, pts_reg, pts_new)points_3d = points_4d[:3] / points_4d[3] # 齐次坐标转3D坐标# 检查点的深度是否为正(在两个相机前方)valid_points = []for i in range(points_3d.shape[1]):point = points_3d[:, i]# 在第一个相机坐标系下的深度depth_reg = np.dot(R_reg, point) + t_reg.flatten()# 在新相机坐标系下的深度depth_new = np.dot(R_new, point) + t_new.flatten()if depth_reg[2] > 0 and depth_new[2] > 0:valid_points.append(i)if not valid_points:continue# 获取点的颜色(取两个视图的平均)img_new = self.images[new_img_idx]img_reg = self.images[reg_img]for i in valid_points:match_idx = match_indices[i]# 获取两个视图中的颜色kp_new_idx = matches[match_idx].trainIdxkp_reg_idx = matches[match_idx].queryIdxx_new, y_new = map(int, map(round, kp_new[kp_new_idx].pt))x_reg, y_reg = map(int, map(round, kp_reg[kp_reg_idx].pt))color_new = img_new[y_new, x_new][::-1] # BGR转RGBcolor_reg = img_reg[y_reg, x_reg][::-1]avg_color = ((np.array(color_new) + np.array(color_reg)) / 2).astype(int)# 添加到点云self.point_cloud.append((*points_3d[:, i], *avg_color))point_id = len(self.point_cloud) - 1self.point_visibility[point_id] = [reg_img, new_img_idx]
4. 光束法平差优化
def bundle_adjustment(self, n_iterations=10):"""执行光束法平差优化相机位姿和3D点"""print("Running bundle adjustment...")if not self.camera_poses or not self.point_cloud:raise ValueError("No camera poses or point cloud available")# 准备数据n_cameras = len(self.camera_poses)n_points = len(self.point_cloud)# 获取相机参数和点参数camera_params = []camera_indices = {img_idx: i for i, img_idx in enumerate(self.camera_poses.keys())}for img_idx in self.camera_poses:R, t = self.camera_poses[img_idx]# 将旋转矩阵转换为旋转向量rvec, _ = cv2.Rodrigues(R)camera_params.extend([*rvec.flatten(), *t.flatten()])camera_params = np.array(camera_params, dtype=np.float64)points_3d = np.array([p[:3] for p in self.point_cloud], dtype=np.float64)# 准备观测数据(2D点)observations = []camera_idx_for_obs = []point_idx_for_obs = []for point_id, img_list in self.point_visibility.items():for img_idx in img_list:# 找到这个点在图像中的位置# 这里简化处理,实际应该建立特征点与3D点的对应关系# 为了简化,我们假设点云中的点顺序与特征点顺序一致kp_list = self.keypoints[img_idx]for i, kp in enumerate(kp_list):# 简化处理,实际应该使用更精确的匹配关系if (img_idx, i) in [(img_idx, m.queryIdx) for m in self.matches.get((min(img_idx, other), max(img_idx, other)), []) for other in self.camera_poses if (min(img_idx, other), max(img_idx, other)) in self.matches]:observations.append(kp.pt)camera_idx_for_obs.append(camera_indices[img_idx])point_idx_for_obs.append(point_id)breakobservations = np.array(observations, dtype=np.float64)# 优化函数def fun(params, n_cameras, n_points, camera_indices, point_indices, observations):"""计算残差"""camera_params = params[:n_cameras * 6].reshape((n_cameras, 6))points_3d = params[n_cameras * 6:].reshape((n_points, 3))residuals = []for i in range(len(observations)):camera_idx = camera_indices[i]point_idx = point_indices[i]rvec = camera_params[camera_idx, :3]tvec = camera_params[camera_idx, 3:6]point = points_3d[point_idx]# 投影点projected, _ = cv2.projectPoints(point.reshape(1, 1, 3),rvec,tvec,self.K,None)projected = projected.reshape(-1)# 计算残差residual = observations[i] - projectedresiduals.extend(residual)return np.array(residuals)# 将参数合并为一个数组x0 = np.hstack((camera_params.ravel(), points_3d.ravel()))# 调用最小二乘优化res = least_squares(fun, x0,jac='3-point',method='trf',max_nfev=n_iterations,verbose=2,args=(n_cameras, n_points, camera_idx_for_obs, point_idx_for_obs, observations))# 更新优化后的参数optimized_params = res.xcamera_params_opt = optimized_params[:n_cameras * 6].reshape((n_cameras, 6))points_3d_opt = optimized_params[n_cameras * 6:].reshape((n_points, 3))# 更新相机位姿for i, img_idx in enumerate(self.camera_poses.keys()):rvec = camera_params_opt[i, :3]tvec = camera_params_opt[i, 3:6]R, _ = cv2.Rodrigues(rvec)t = tvec.reshape(3, 1)self.camera_poses[img_idx] = (R, t)# 更新点云for i in range(n_points):x, y, z = points_3d_opt[i]r, g, b = self.point_cloud[i][3:6]self.point_cloud[i] = (x, y, z, r, g, b)
5. 可视化与结果展示
def visualize_point_cloud(self, method='matplotlib'):"""可视化重建的点云"""if not self.point_cloud:print("No point cloud to visualize")returnprint("Visualizing point cloud...")# 提取点坐标和颜色points = np.array([p[:3] for p in self.point_cloud])colors = np.array([p[3:6] for p in self.point_cloud]) / 255.0if method == 'matplotlib':fig = plt.figure(figsize=(10, 8))ax = fig.add_subplot(111, projection='3d')ax.scatter(points[:, 0], points[:, 1], points[:, 2],c=colors, s=1, alpha=0.6, marker='.')# 绘制相机位置for img_idx, (R, t) in self.camera_poses.items():camera_center = -R.T @ tax.scatter(camera_center[0], camera_center[1], camera_center[2],c='red', s=50, marker='^')ax.text(camera_center[0], camera_center[1], camera_center[2],f'Cam {img_idx}', color='black')ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')ax.set_title('Reconstructed 3D Point Cloud')plt.show()elif method == 'plotly':fig = go.Figure()# 添加点云fig.add_trace(go.Scatter3d(x=points[:, 0],y=points[:, 1],z=points[:, 2],mode='markers',marker=dict(size=2,color=colors,opacity=0.8),name='Point Cloud'))# 添加相机for img_idx, (R, t) in self.camera_poses.items():camera_center = -R.T @ tfig.add_trace(go.Scatter3d(x=[camera_center[0]],y=[camera_center[1]],z=[camera_center[2]],mode='markers+text',marker=dict(size=5,color='red',symbol='diamond'),text=f'Cam {img_idx}',textposition="top center",name=f'Camera {img_idx}'))fig.update_layout(title='Reconstructed 3D Point Cloud',scene=dict(xaxis_title='X',yaxis_title='Y',zaxis_title='Z',aspectmode='data'),margin=dict(l=0, r=0, b=0, t=0))fig.show()else:raise ValueError(f"Unsupported visualization method: {method}")
6. 完整流程示例
# 使用示例
if __name__ == "__main__":# 初始化重建系统image_dir = "path/to/your/images" # 替换为你的图像目录reconstructor = MultiViewReconstruction(image_dir, focal_length=2000)# 1. 特征提取reconstructor.extract_features(method='SIFT')# 2. 特征匹配reconstructor.match_features(method='FLANN', ratio_test=0.7)# 可视化一些匹配reconstructor.visualize_matches(0, 1)# 3. 相机位姿估计与三维重建reconstructor.estimate_initial_pose()# 4. 光束法平差优化reconstructor.bundle_adjustment(n_iterations=20)# 5. 可视化结果reconstructor.visualize_point_cloud(method='plotly')
系统说明
这个多视角三维重建系统实现了以下功能:
-
数据准备:加载多视角图像数据集,设置相机内参。
-
特征提取与匹配:
- 支持SIFT、SURF和ORB特征提取算法
- 使用FLANN或暴力匹配进行特征匹配
- 应用Lowe’s ratio test筛选优质匹配
-
相机位姿估计:
- 从特征匹配计算本质矩阵
- 使用RANSAC去除异常值
- 恢复相机相对位姿
-
三维重建:
- 通过三角测量生成初始点云
- 增量式运动恢复结构逐步添加更多视图
- 处理新视图的注册和新增点的三角测量
-
模型优化:
- 实现光束法平差(Bundle Adjustment)优化相机位姿和3D点
- 使用Scipy的最小二乘优化器
-
可视化展示:
- 支持Matplotlib和Plotly两种可视化方式
- 显示点云和相机位置
技术要点
-
特征选择:SIFT特征对旋转、尺度变化和光照变化具有较好的不变性。
-
鲁棒估计:使用RANSAC算法处理匹配中的异常值。
-
增量式重建:逐步添加视图,保证重建的稳定性。
-
全局优化:光束法平差同时优化所有相机参数和3D点坐标,提高重建精度。
-
效率优化:使用稀疏矩阵和高效的最小二乘算法处理大规模优化问题。
扩展方向
-
稠密重建:在稀疏点云基础上进行稠密重建,获取更完整的表面。
-
纹理映射:将原始图像纹理映射到重建的3D模型上。
-
并行计算:利用GPU加速特征提取和匹配过程。
-
实时重建:优化算法实现实时三维重建。
这个系统提供了多视角三维重建的基础框架,可以根据具体应用需求进行进一步扩展和优化。
相关文章:

python 实现一个完整的基于Python的多视角三维重建系统,包含特征提取与匹配、相机位姿估计、三维重建、优化和可视化等功能
多视角三维重建系统 下面我将实现一个完整的基于Python的多视角三维重建系统,包含特征提取与匹配、相机位姿估计、三维重建、优化和可视化等功能。 1. 环境准备与数据加载 首先安装必要的库: pip install opencv-python opencv-contrib-python numpy…...

行列式中某一行的元素与另一行对应元素的代数余子式乘积之和等于零
问题陈述 为什么行列式中某一行(列)的元素与另一行(列)对应元素的代数余子式乘积之和等于零?即: ∑ k 1 n a i k C j k 0 ( i ≠ j ) \sum_{k1}^{n} a_{ik} C_{jk} 0 \quad (i \ne j) k1∑naikCjk…...

【时时三省】Python 语言----字符串,列表,元组,字典常用操作异同点
目录 1,字符串常用操作 1,创建 2,访问 3,常用方法 4,内置方法 2,列表 1,创建列表 2,访问列表 3,内置方法 3,元组 1,创建 2,访问 3,内置方法 4,字典 1,创建 2,访问 3,内置方法 5,集合 1,创建 2,访问 3,内置方法 山不在高,有仙则名。水不在深,有龙则…...

基于cornerstone3D的dicom影像浏览器 第二十二章 mpr + vr
系列文章目录 第一章 下载源码 运行cornerstone3D example 第二章 修改示例crosshairs的图像源 第三章 vitevue3cornerstonejs项目创建 第四章 加载本地文件夹中的dicom文件并归档 第五章 dicom文件生成png,显示检查栏,序列栏 第六章 stack viewport 显…...

优启通添加自定义浏览器及EXLOAD使用技巧分享
文章目录 优启通添加自定义浏览器及EXLOAD使用技巧分享🚩问题描述🔧解决方案概述📁自定义软件添加方法汇总🧩快捷方式配置:exload.cfg 用法大全🧷基础用法🗂分类菜单🖥创建桌面快捷方…...
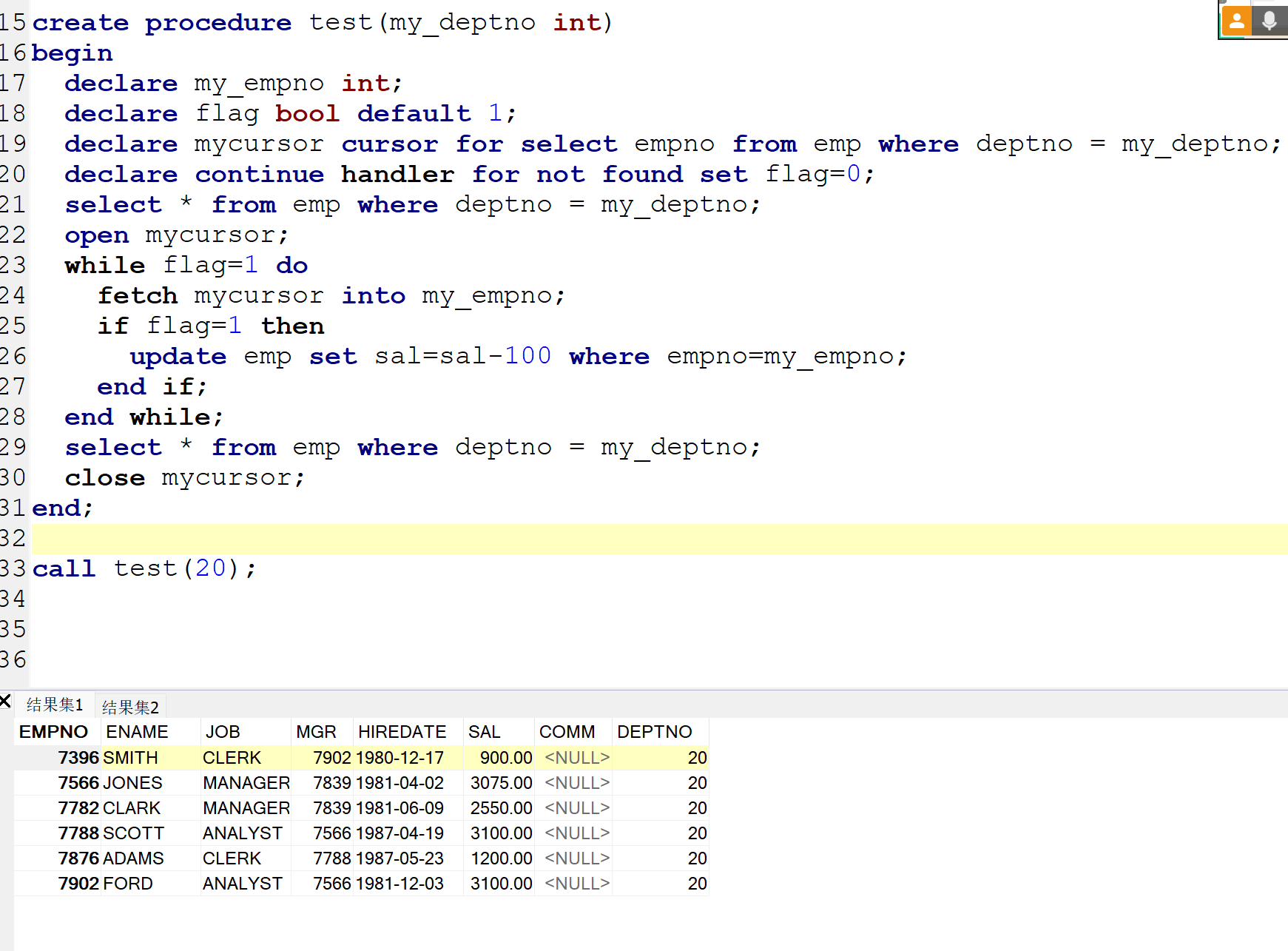
MySQL:游标 cursor 句柄
当我们select * from emp 可以查看所有的数据 这个数据就相当于一个数据表 游标的作用相当于一个索引 一个指针 指向每一个数据 假设说我要取出员工中薪资最高的前五名成员 就要用到limit关键字 但是这样太麻烦了 所以这里用到了游标 游标的声明: declare my…...

二、ZooKeeper 集群部署搭建
作者:IvanCodes 日期:2025年5月24日 专栏:Zookeeper教程 我们这次教程将以 hadoop01 (192.168.121.131), hadoop02 (192.168.121.132), hadoop03 (192.168.121.133) 三台Linux服务器为例,搭建一个ZooKeeper 3.8.4集群。 一、下载…...
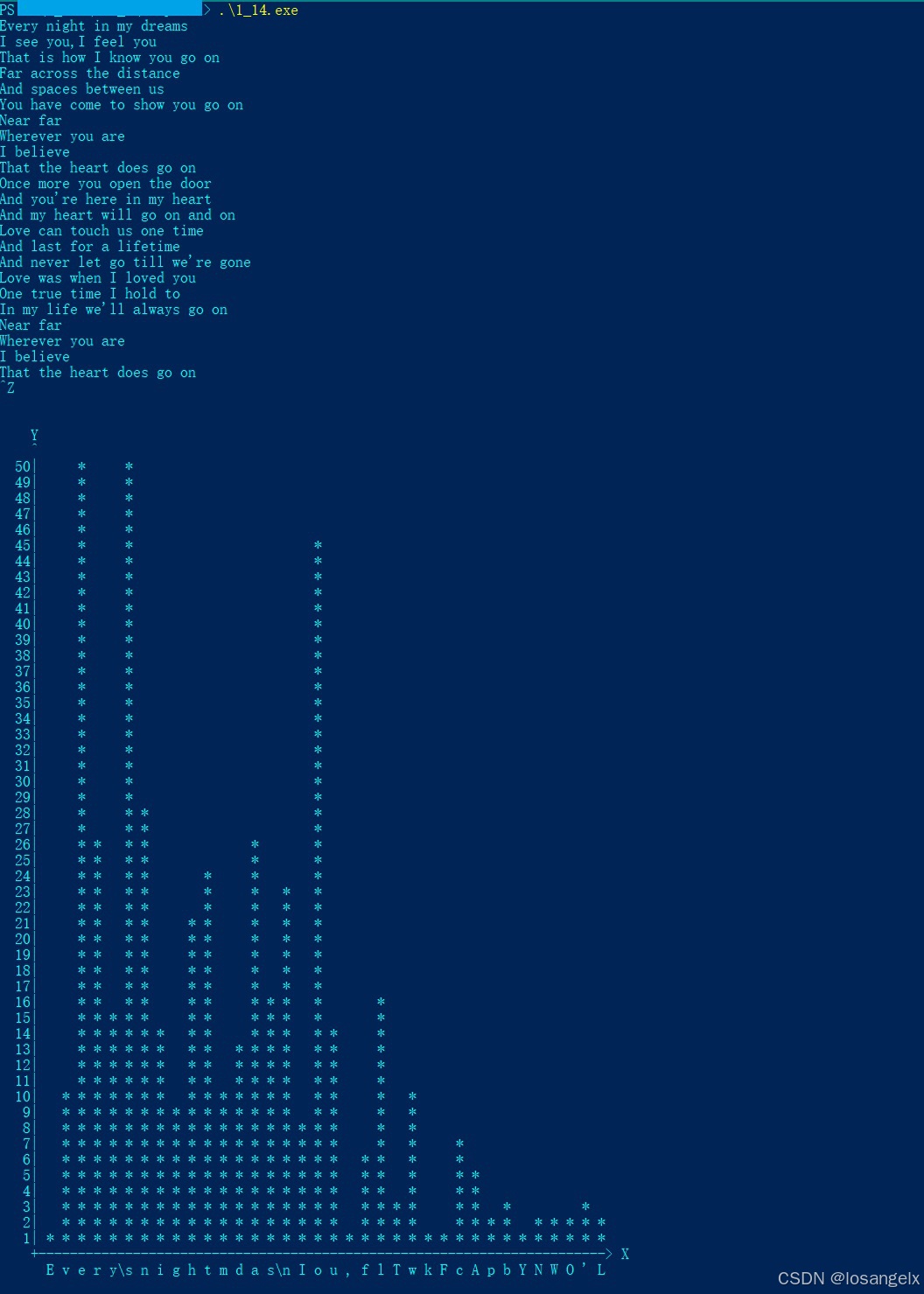
<< C程序设计语言第2版 >> 练习1-14 打印输入中各个字符出现频度的直方图
1. 前言 本篇文章是<< C程序设计语言第2版 >> 的第1章的编程练习1-14, 个人觉得还有点意思, 所以写一篇文章来记录下. 希望可以给初学C的同学一点参考. 尤其是自学的同学, 或者觉得以前学得不好, 需要自己补充学习的同学. 和我的很多其它文章一样, 不建议自己还没实…...
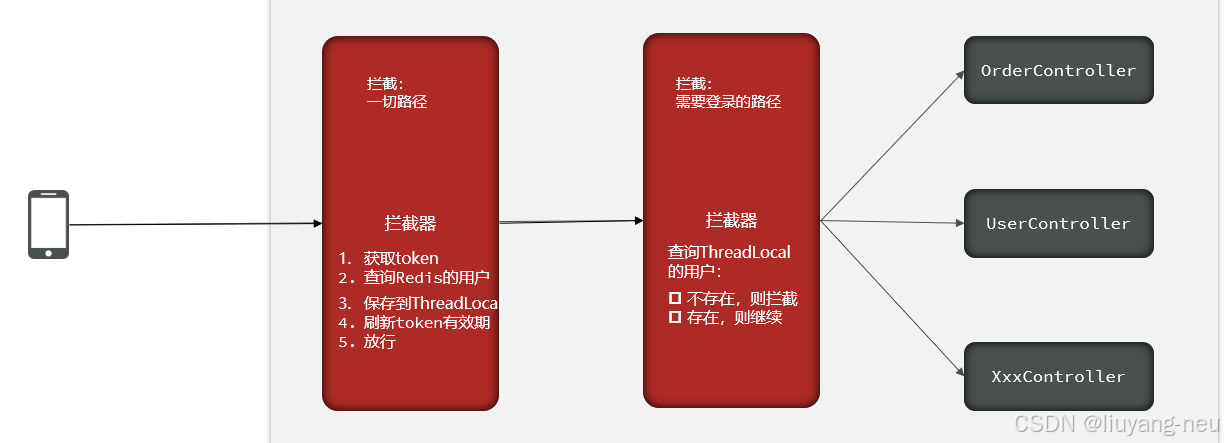
黑马点评双拦截器和Threadlocal实现原理
文章目录 双拦截器ThreadLocal实现原理 双拦截器 实现登录状态刷新的原因: 防止用户会话过期:通过动态刷新Token有效期,确保活跃用户不会因固定过期时间而被强制登出 提升用户体验:用户无需频繁重新登录,只要…...

港股IPO市场火爆 没有港卡如何参与港股打新?
据Wind资讯数据统计,今年1月1日至5月20日,港股共有23家企业IPO,较去年同期增加6家;IPO融资规模达600亿港元,较去年同期增长626.54%,IPO融资规模重回全球首位。 港股IPO市场持续火爆,不少朋友没有…...
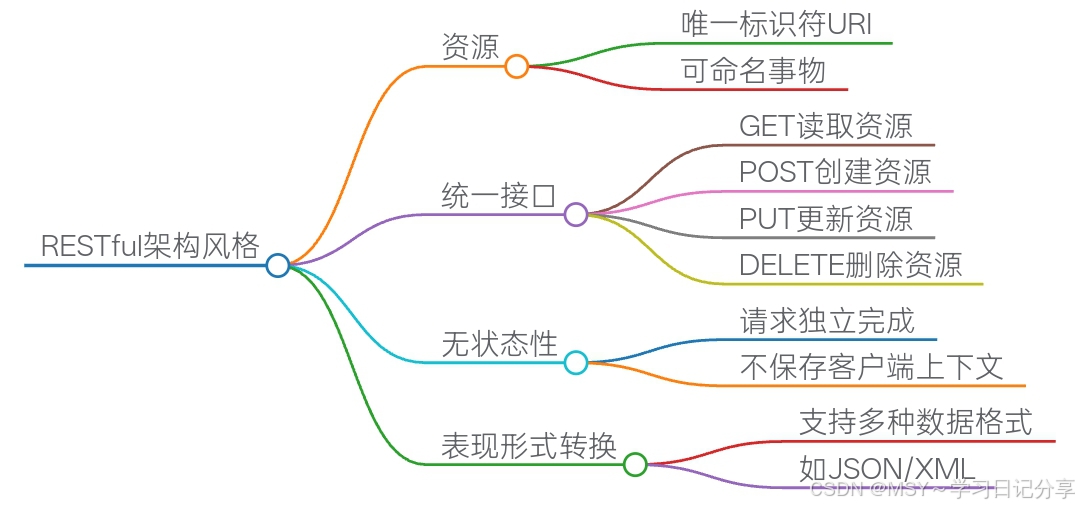
RESTful API 在前后端交互中的作用与实践
一、RESTful API 概述 RESTful(Representational State Transfer)API 是一种基于 HTTP 协议、面向资源的架构风格,旨在实现前后端的松散耦合和高效通信。它通过定义统一的资源标识、操作方法以及数据传输格式,为前后端提供了一种…...

Jenkins+Docker+Harbor快速部署Spring Boot项目详解
JenkinsDockerHarbor快速部署Spring Boot项目详解 Jenkins、Docker和Harbor是现代DevOps流程中的核心工具,结合使用可以实现自动化构建、测试和部署。下面我将详细介绍如何搭建这个集成环境。 一、各工具的核心作用 Jenkins 自动化CI/CD工具,负责拉取代…...
python打卡训练营打卡记录day35
知识点回顾: 三种不同的模型可视化方法:推荐torchinfo打印summary权重分布可视化进度条功能:手动和自动写法,让打印结果更加美观推理的写法:评估模式 作业:调整模型定义时的超参数,对比下效果 1…...

如何评价OpenRouter这样的大模型API聚合平台?
OpenRouter通过统一接口简化多模型访问与集成的复杂性,实现一站式调用。然而,这种便利性背后暗藏三重挑战:成本控制、服务稳定性、对第三方供应商的强依赖性。 现在AI大模型火得一塌糊涂,新模型层出不穷,各有各的长处。但是对于开发者来说,挨个去对接OpenAI、谷歌、Anthr…...

恢复二叉搜索树:递归与中序遍历的智慧应用
恢复二叉搜索树:递归与中序遍历的智慧应用 二叉搜索树(BST)是一种在算法世界里相当重要的数据结构,它的特性——左子树的节点值小于根节点,而右子树的节点值大于根节点——让它在查找、插入和删除操作上都能高效运行。然而,现实总是充满意外,有时候由于错误的操作或数据…...

从零开始构建一个区块链应用:技术解析与实践指南
区块链技术自比特币诞生以来,已经逐渐从金融领域扩展到更多行业,如供应链管理、物联网、智能合约等。它以其去中心化、不可篡改和透明性等特点,吸引了众多开发者的关注。然而,对于初学者来说,区块链技术的学习曲线可能…...
5.2.4 wpf中MultiBinding的使用方法
在 WPF 中,MultiBinding 允许将多个绑定(Binding)组合成一个逻辑结果,并通过一个转换器(IMultiValueConverter)处理这些值,最终影响目标属性。以下是其核心用法和示例: 核心组件: MultiBinding:定义多个绑定源的集合。 IMultiValueConverter:实现逻…...

技术服务业-首套运营商网络路由5G SA测试专网搭建完成并对外提供服务
为了更好的服务蜂窝无线技术及运营商测试认证相关业务,搭建了技术服务业少有的5G测试专网,可独立灵活配置、完整端到端5G(含RedCap、LAN)的网络架构。 通过走真正运营商网络路由的方式,使终端设备的测试和运营商网络兼…...
仿腾讯会议——音频服务器部分
1、中介者定义处理音频帧函数 2、 中介者实现处理音频帧函数 3、绑定函数映射 4、服务器定义音频处理函数 5、 服务器实现音频处理函数...

大文件上传,对接阿里oss采用前端分片技术。完成对应需求!
最近做了一个大文件分片上传的功能,记录下 1. 首先是安装阿里云 oss 扩展 composer require aliyuncs/oss-sdk-php 去阿里云 oss 获取配置文件 AccessKey ID *** AccessKey Secret *** Bucket名称 *** Endpoint *** 2. 前端上传,对文件进行分片…...
【场景分析】基于概率距离快速削减法的风光场景生成与削减方法
目录 1 主要内容 场景消减步骤 2 部分代码 3 程序结果 1 主要内容 该程序参考文献《含风光水的虚拟电厂与配电公司协调调度模型》场景消减部分模型,程序对风电场景进行生成并采用概率距离方法进行消减,程序先随机生成200个风电出力场景,然…...

【Java Web】3.SpringBootWeb请求响应
📘博客主页:程序员葵安 🫶感谢大家点赞👍🏻收藏⭐评论✍🏻 文章目录 一、请求 1.1 postman 1.2 简单参数 1.3 实体参数 1.4 数组集合参数 1.5 日期参数 1.6 JSON参数 1.7 路径参数 二、响应 2…...
单片机中断系统工作原理及定时器中断应用
文件目录 main.c #include <REGX52.H> #include "TIMER0.H" #include "KEY.H" #include "DELAY.H"//void Timer0_Init() { // TMOD 0x01; // TL0 64536 % 256; // TH0 64536 / 256; // ET0 1; // EA 1; // TR0 1; //}unsigned char…...
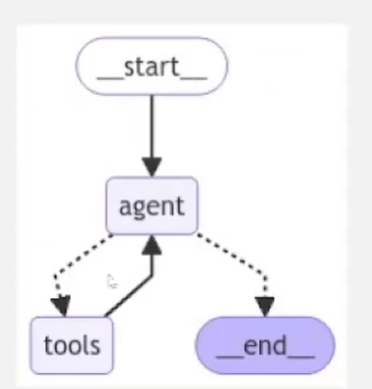
LangGraph-agent-天气助手
用于创建agent和多代理工作流 循环(有迭代次数)、可控、持久 安装langgraph包 conda create --name agent python3.12 conda activate agent pip install -U langgraph pip install langchain-openai设置 windows(>结尾) s…...
深度学习——超参数调优
第一部分:什么是超参数?为什么要调优? 一、参数 vs 超参数(Parameter vs Hyperparameter) 类型定义举例是否通过训练自动学习?参数(Parameter)是模型在训练过程中通过反向传播自动…...

阿里云API RAG全流程实战:从模型调用到多模态应用的完整技术链路
一、引言 在企业级智能应用开发中,如何让大模型高效利用动态数据并生成准确回答,是构建智能问答系统的核心挑战。阿里云提供的API RAG(检索增强生成)流程,通过整合通义千问大模型、百炼智能体平台与知识库管理体系&am…...
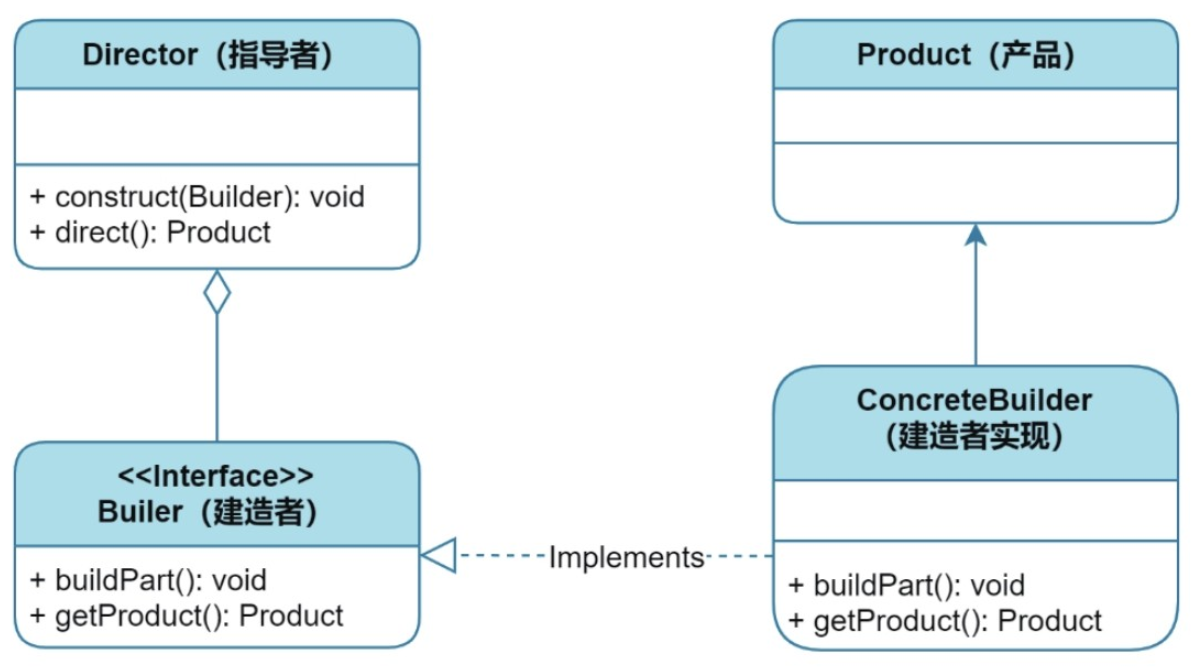
创建型:建造者模式
目录 1、核心思想 2、实现方式 2.1 模式结构 2.2 工作流程 2.3 实现案例 2.4 变体:链式建造者(常见于多参数对象,无需指挥者) 3、优缺点分析 4、适用场景 1、核心思想 目的:将复杂对象的构建过程与其表示分离…...

Jenkins集成Docker与K8S构建
Jenkins 是一个开源的持续集成和持续交付(CI/CD)工具,广泛用于自动化软件开发过程中的构建、测试和部署任务。它通过插件系统提供了高度的可扩展性,支持与多种开发工具和技术的集成。 Jenkins 的核心功能 Jenkins 的主要功能包括自动化构建、测试和部署。它能够监控版本控…...
)
redis缓存实战-19(使用 Pub/Sub 构建简单的聊天应用程序)
实践练习:使用 Pub/Sub 构建简单的聊天应用程序 Redis Pub/Sub 是一项强大的功能,可在应用程序的不同部分之间实现实时通信。这是一种消息传递范例,其中发送方(发布者)不直接向特定接收方(订阅者)发送消息,而是将消息发布到通道。订阅者对一个或多个通道表示兴趣,并且…...
UE4游戏查找本地角色数据的方法-SDK
UE4中,玩家的表示通常涉及以下几个类: APlayerController: 代表玩家的控制逻辑,处理输入等。 APawn: 代表玩家在世界中的实体(比如一个角色、一辆车)。APlayerController 控制一个 APawn。 ACharacter: APawn 的一个…...