(九)PMSM驱动控制学习---高阶滑膜观测器
在之前的文章中,我们介绍了永磁同步电机无感控制中的滑模观测器,但是同时我们也认识到了他的缺点:因符号函数带来的高频切换分量,使用低通滤波器引发相位延迟;在本篇文章,我们将会介绍高阶滑模观测器的无感控制策略,该种方案拥有不需要经过低通滤波器的优势,收敛速度更快,能够增强观测精度,通过构造更复杂的滑模面,引入额外的滑膜增益项,可以有效地抑制外部噪声、系统参数变化等不确定性,拥有更强的鲁棒性。
目录
一.高阶状态变量
(1)一阶状态变量
(2)“高阶”状态变量
二.永磁同步电机数学模型
(1)永磁同步电机在两相静止坐标系下的数学模型为:
(2)扩展电动势
三.高阶滑模观测器设计
六.Simulink仿真
一.高阶状态变量
状态变量是用来描述系统动态行为的一组变量,通常构成状态空间模型的基础。而状态变量本身都是通过一阶微分方程来描述的,不管原系统是几阶。
(1)一阶状态变量
一阶系统由单个一阶微分方程描述,仅需一个状态变量。例如:
仅含一个状态变量 x
(2)“高阶”状态变量
高阶系统(如n阶微分方程)通过引入多个一阶状态变量来简化。例如二阶系统可简化:
![]()
可分解为:
对应的状态方程:
这里的“高阶”指原系统的微分方程阶数(如二阶、三阶),而非状态变量本身。指通过增加状态变量的数量来处理高阶系统,其每个状态变量仍是一阶的,但数量与系统阶数相等。
在传统的滑膜观测器设计中,其状态估计变量是电流,而在我们的高阶滑膜观测器中,其状态估计变量除了电流,还有我们的反电动势。在后面会对其原理和设计进行介绍。
二.永磁同步电机数学模型
(1)永磁同步电机在两相静止坐标系下的数学模型为:
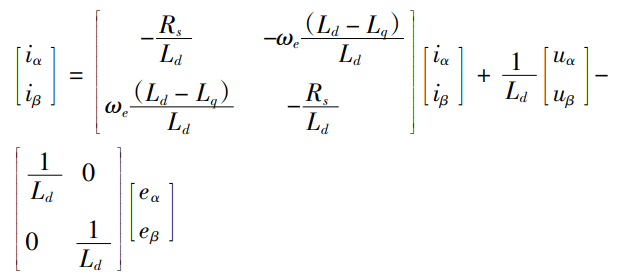
---式(1)
(2)扩展电动势(electromotive force,EMF)可以写为如下形式:

---式(2)
三.高阶滑模观测器设计
设计我们高阶滑膜观测器的前提是,机械时间常数远大于电气时间常数,故ωe的导等于0;或者可以这么理解,在mcu的一个很短的控制周期内,速度变化量小,ωe的导约等于0。
所以我们可将式(2)求导并化简得到:


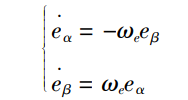
---式(3)
将式(1)的电流状态变量和式(3)的EMF作为高阶状态变量描述如下:
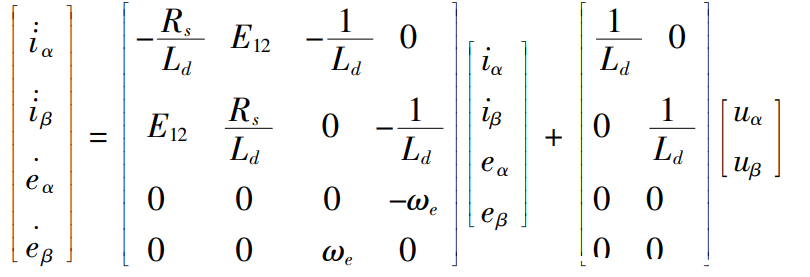
---式(4)
式(4)中![]()
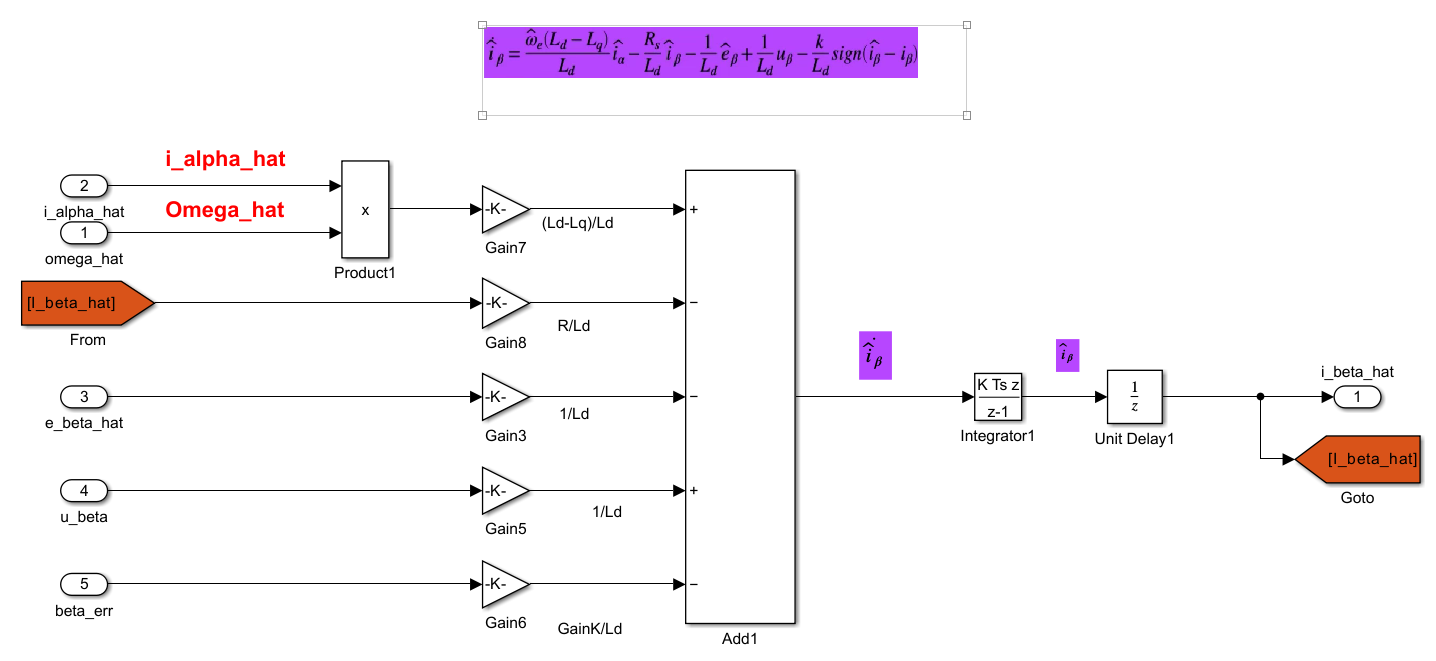
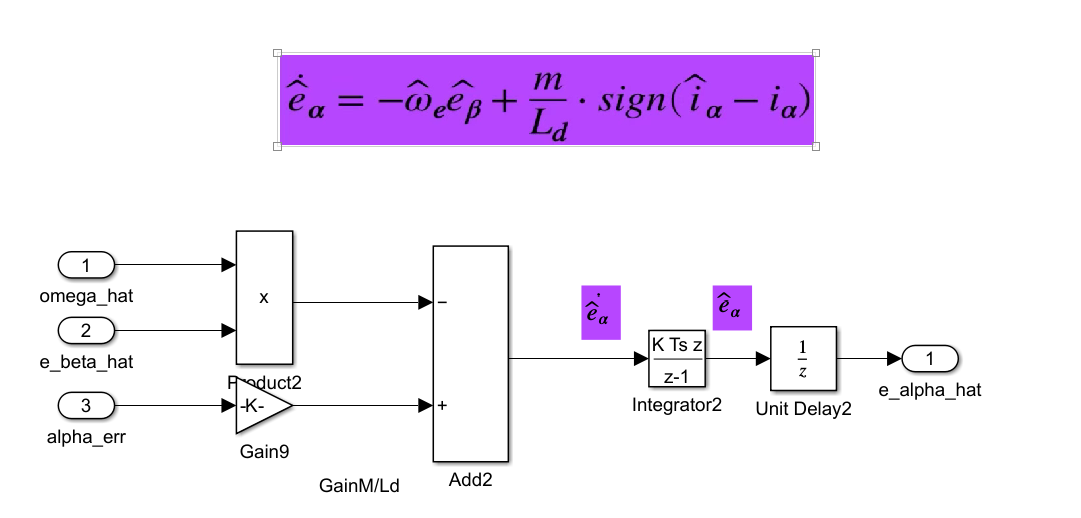
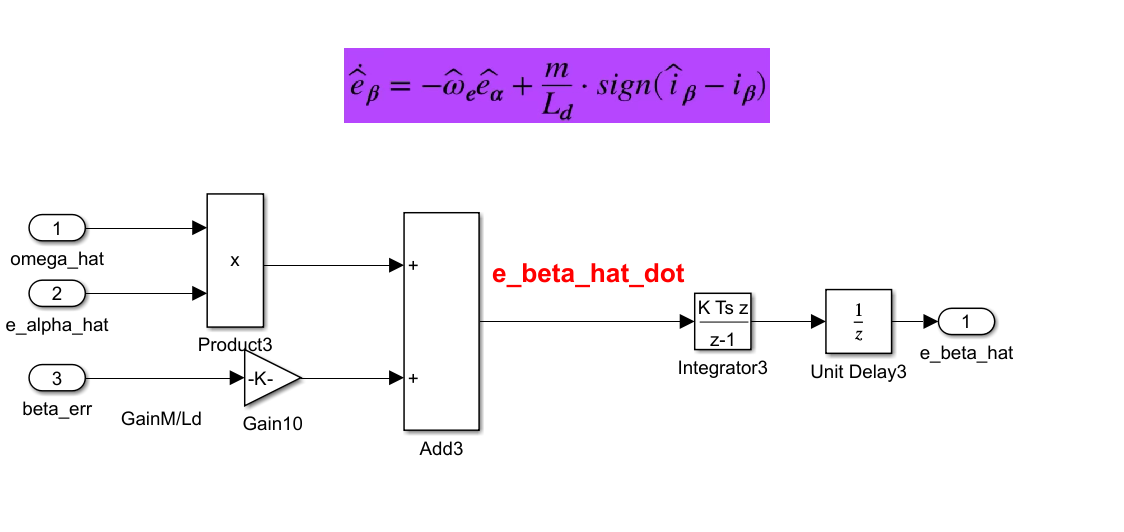
基于上式,我们设计高阶滑膜观测器为:
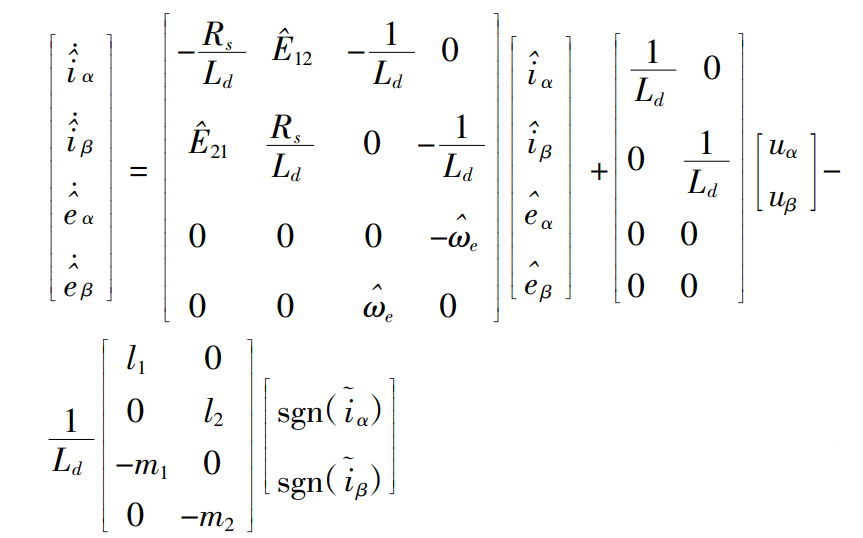
将上矩阵展开得到:
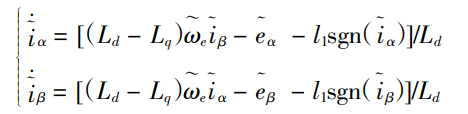
---式(5)
在滑模面附近,有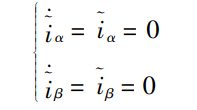 ,所以带入式(5)中,两个不连续的高频切换控制分量可以等效表示为:
,所以带入式(5)中,两个不连续的高频切换控制分量可以等效表示为:
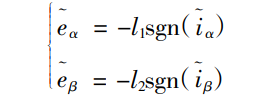
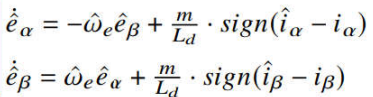
将上式代入式(5)的后两式,可得:
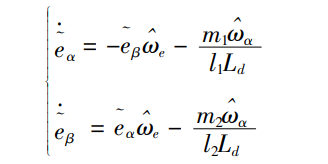
---式(6)
由此可见,由于我们将符号函数用等效表示替代,式中没有出现因符号函数带来的高频切换分量。因此,使用高阶滑模观测器估计的角速度不需要经过低通滤波器,简化了控制系统结构。
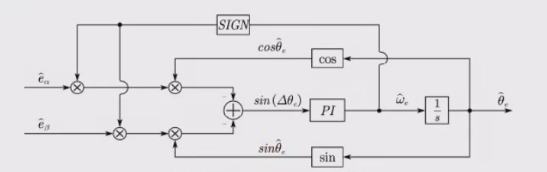
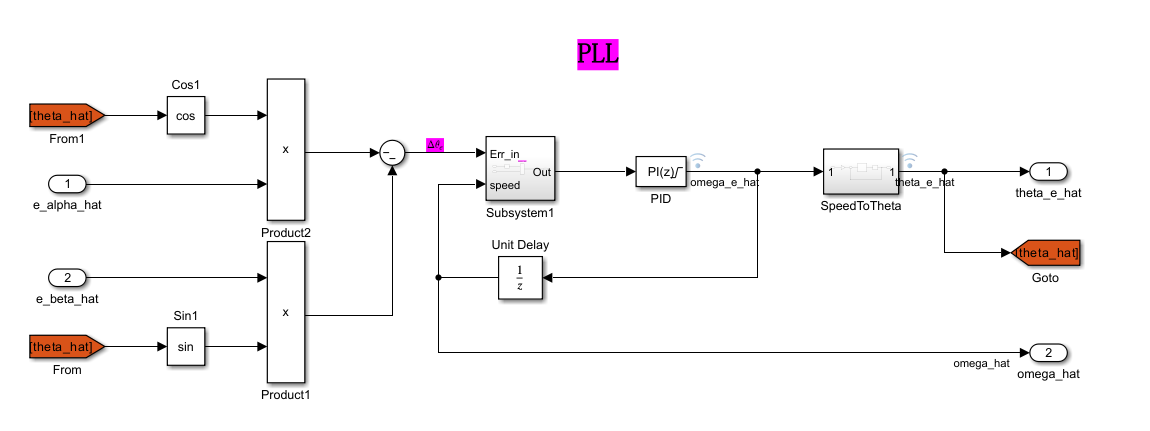
将公式编码到MCU迭代计算,调整增益矩阵中的参数使得观测器收敛,可得到反电动势矩阵![]() 反电动势中包含θe的信息,对其提取可得到速度与角度。当采用id=0控制时,有:
反电动势中包含θe的信息,对其提取可得到速度与角度。当采用id=0控制时,有:

根据反电动势求解出电角度:![]()
在经过PLL角度速度提取,即可得到角速度和电角度:
注:EEMF的收敛速度与转速密切相关,固定的滑模增益不能确定固定的系统阻尼。

后续还可以归一化PLL,使得观测角度与实际角度的传递函数根轨迹不再与转速相关,在本篇文章中暂且不予说明。
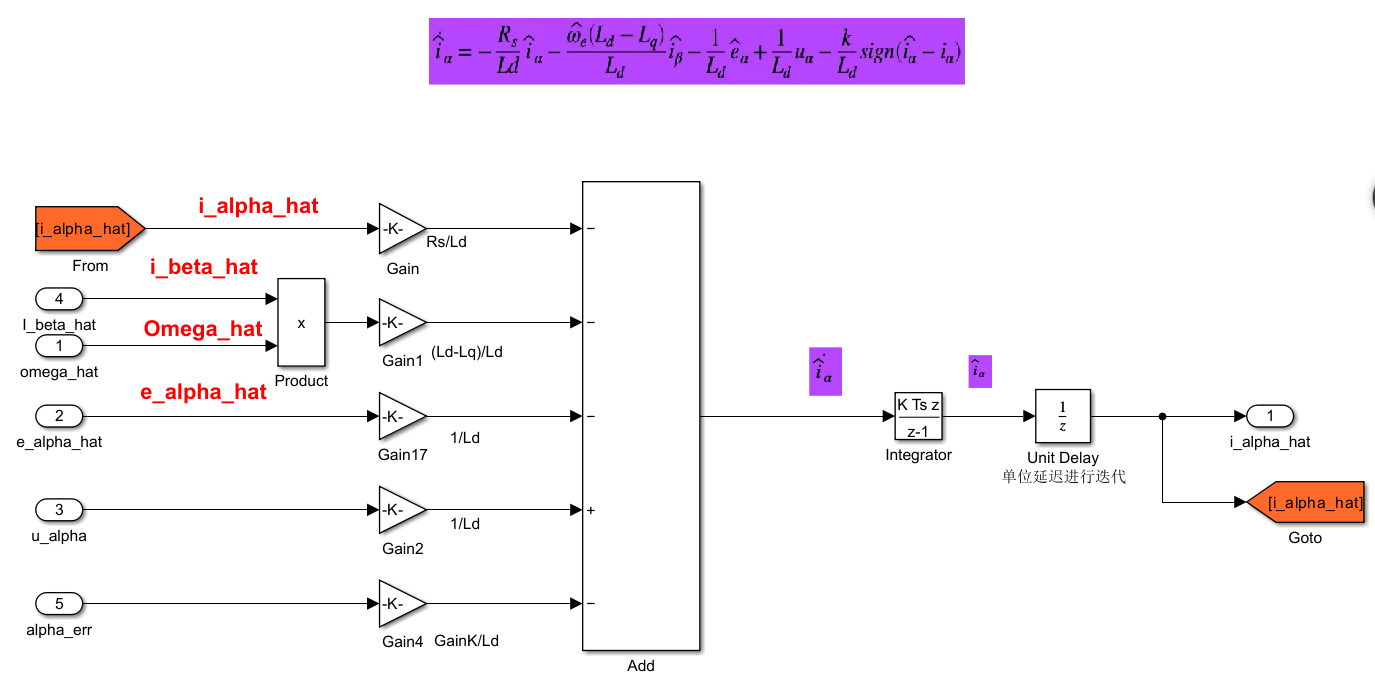
六.Simulink仿真
我们对式(5)式(6)进行建模,并在离散状态下迭代计算:
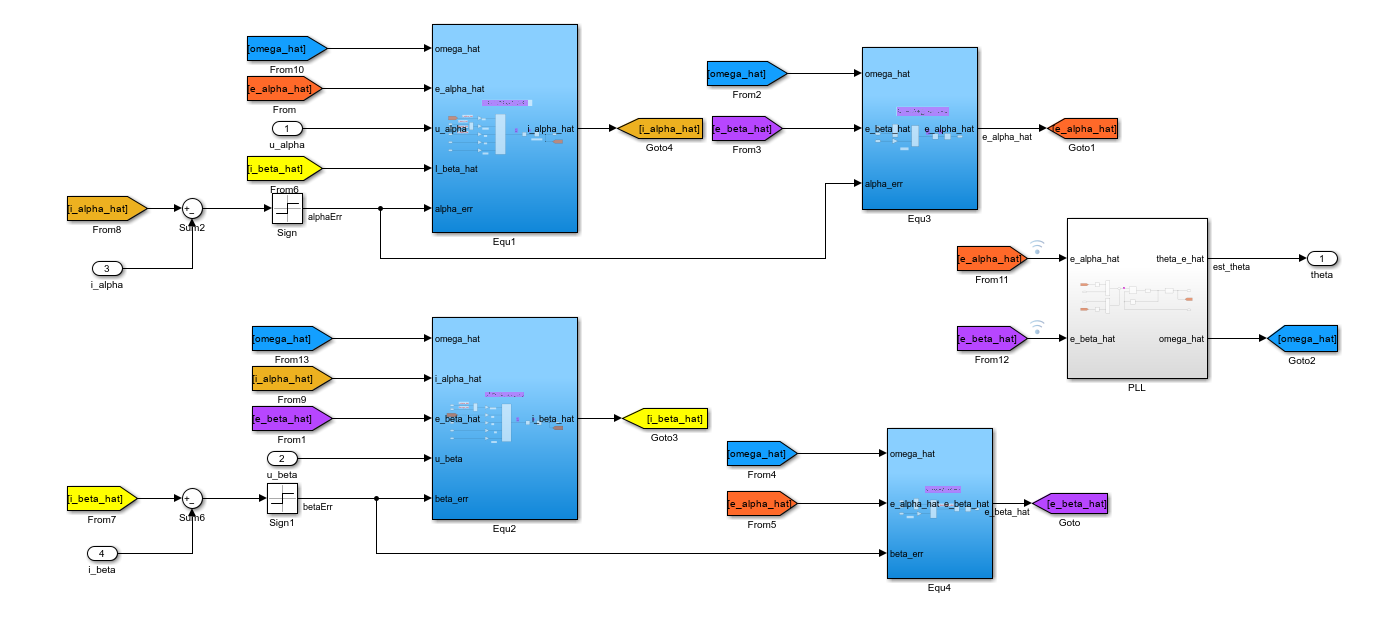
仿真中的模型Equ1-4分别对应着4个公式
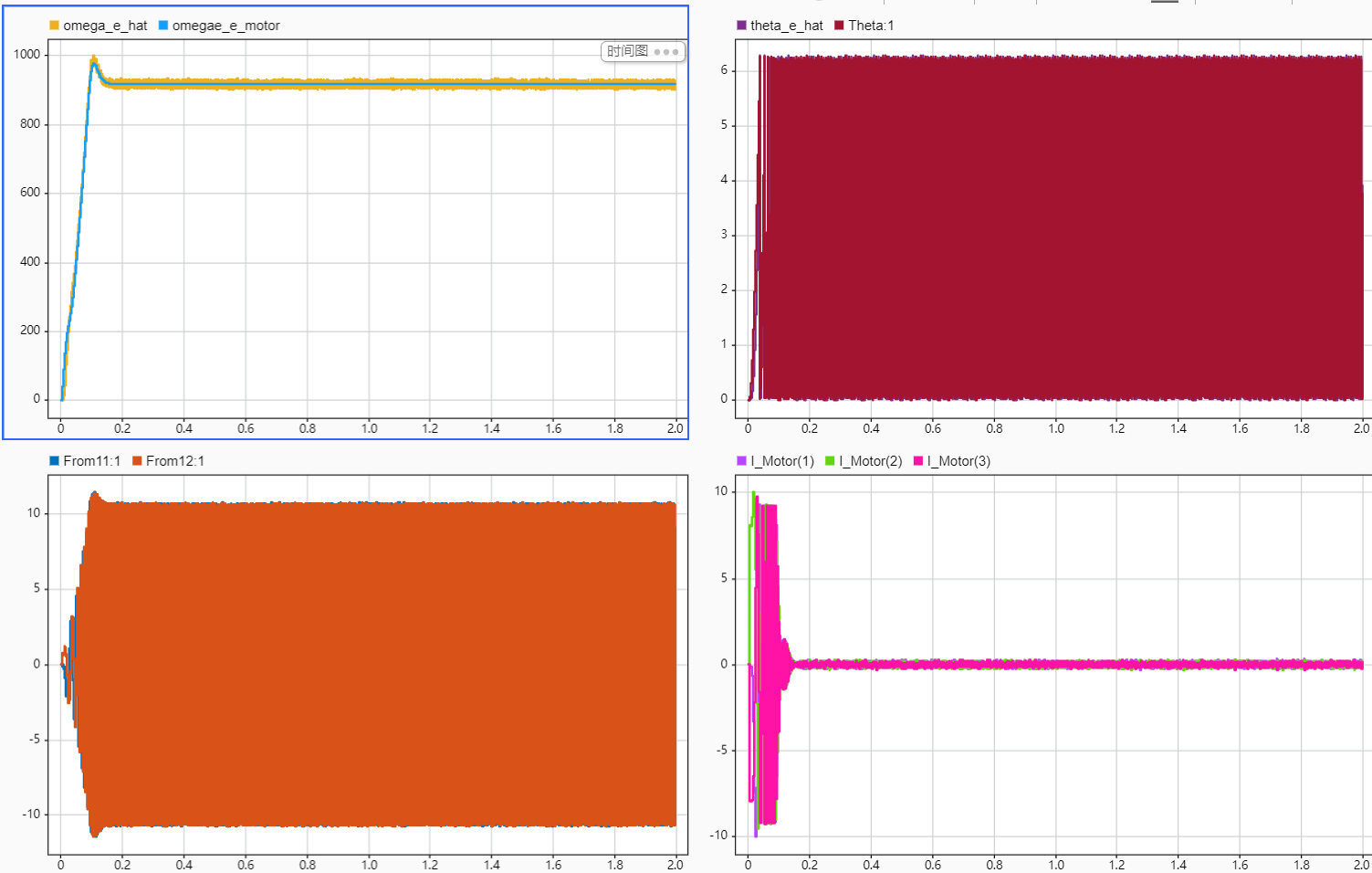
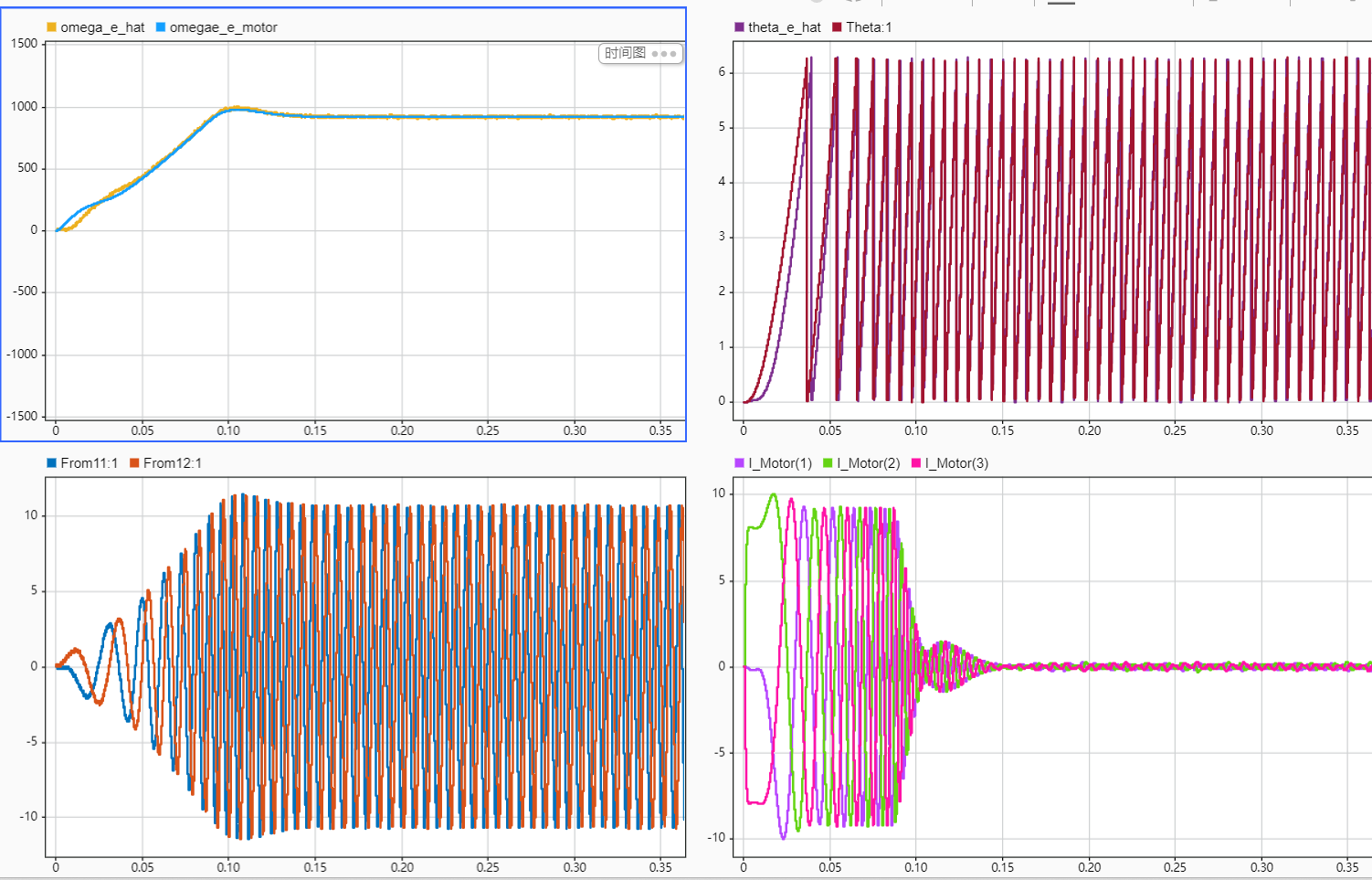
其仿真数据检查器分别是:
1.估计角速度---真实角速度
2.估计电角度和真实电角度
3.αβ反电动势
4.电机三相电流
相关文章:
(九)PMSM驱动控制学习---高阶滑膜观测器
在之前的文章中,我们介绍了永磁同步电机无感控制中的滑模观测器,但是同时我们也认识到了他的缺点:因符号函数带来的高频切换分量,使用低通滤波器引发相位延迟;在本篇文章,我们将会介绍高阶滑模观测器的无感…...
25年上半年五月之软考之设计模式
目录 一、单例模式 二、工厂模式 三、 抽象工厂模式 四、适配器模式 五、策略模式 六、装饰器模式 编辑 考点:会挖空super(coffeOpertion); 七、代理模式 为什么必须要使用代理对象? 和装饰器模式的区别 八、备忘录模式 一、单例模式 这个…...

Mongo DB | 多种修改数据库名称的方式
目录 方法一:使用 mongodump 和 mongorestore 命令 方法二:使用 db.copyDatabase() 方法 方法三:使用 MongoDB Compass 在 MongoDB 中,更改数据库名称并不是一个直接的操作,因为 MongoDB 不提供直接重命名数据库的命…...
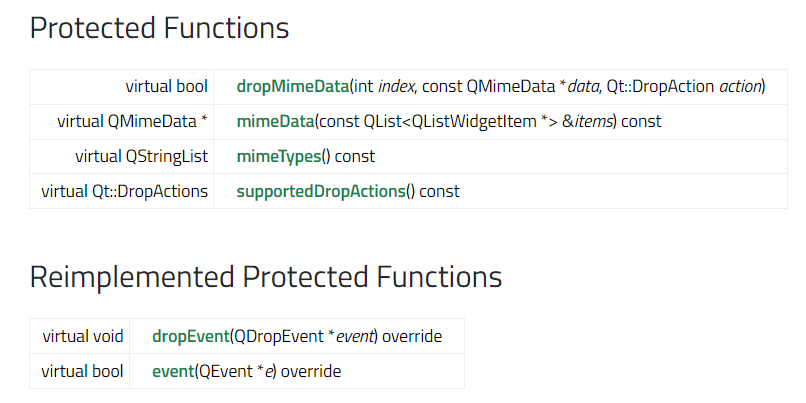
QListWidget的函数,信号介绍
前言 Qt版本:6.8.0 该类用于列表模型/视图 QListWidgetItem函数介绍 作用 QListWidget是Qt框架中用于管理可交互列表项的核心组件,主要作用包括: 列表项管理 支持动态添加/删除项:addItem(), takeItem()批量操作:addItems()…...

Python类属性与实例属性的覆盖机制:从Vector2d案例看灵活设计
类属性与实例属性的交互机制 Python中类属性与实例属性的关系体现了语言的动态特性。当访问一个实例属性时,Python会首先查找实例自身的__dict__,如果找不到,才会去查找类的__dict__。这种机制使得类属性可以优雅地作为实例属性的默认值。 …...

QML与C++交互2
在QML与C的交互中,主要有两种方式:在C中调用QML的方法和在QML中调用C的方法。以下是具体的实现方法。 在C中调用QML的方法 首先,我们需要在QML文件中定义一个函数,然后在C代码中调用它。 示例 //QML main.qml文件 import QtQu…...

EtherNet/IP机柜内解决方案在医疗控制中心智能化的应用潜能和方向分析
引言 在数智化转型浪潮席卷各行各业的今天,医疗领域同样面临着提升运营效率、改善患者体验和加强系统可靠性的多重挑战。Rockwell Automation于2025年5月20日推出的EtherNet/IP机柜内解决方案,为医疗中心的自动化升级提供了一种创新路径。本报告将深入分析这一解决方案的核心…...
)
springboot中各模块间实现bean之间互相调用(service以及自定义的bean)
springboot中各模块间实现bean之间互相调用(service以及自定义的bean) https://blog.csdn.net/qq_29477175/article/details/122827446?ops_request_misc&request_id&biz_id102&utm_termspringboot%E5%A4%9A%E6%A8%A1%E5%9D%97%E4%B9%8B%E…...
)
RabbitMQ 可靠性保障:消息确认与持久化机制(二)
四、持久化机制:数据安全的护盾 (一)交换机持久化 交换机持久化是确保消息路由稳定的重要保障 。在 RabbitMQ 中,交换机负责接收生产者发送的消息,并根据路由规则将消息路由到相应的队列 。如果交换机在 RabbitMQ 重…...

QML学习07Property
Property 1、Property1.1 定义控件1.2 给控件取别名,不向外暴露控件名字 2、总结 1、Property property int myTopMargin: 0 property int myBottomMargin: 0 property real myReal: 0.0 //双精度浮点数 property string myString: "test" property…...

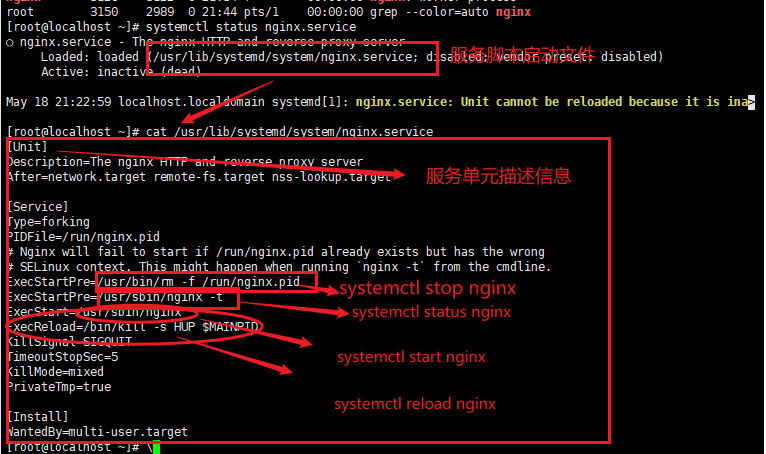
Skywalking安装部署使用教程
目录 核心功能 架构设计 安装与配置 使用场景 社区与支持 总结 官网 https:///apache/skywalking 部署Skywalking 添加报警配置 自定义告警规则如果您需要自定义告警规则,则需要编辑 alarm-settings.yml 文件并添加自定义的规则。具体来说,您需要按照 YAML 格式定义…...

网络编程与axios技术
网络编程技术是指通过计算机网络实现不同设备之间数据交互的技术。它基于网络通信协议(如TCP/IP、HTTP)和编程语言的支持,结合库和API实现高效的数据传输与通信。以下是几种主流技术栈(JavaScript、TypeScript、React、Next.js、P…...

【结构设计】以3D打印举例——持续更新
【结构设计】以立创EDA举例——持续更新 文章目录 [TOC](文章目录) 前言立创EDA官网教程一、3D外壳绘制二、3D外壳渲染三、3D外壳打印1.3D打印机——FDM2.3D打印机——光固化 四、3D外壳LOG设计1.激光雕刻机 总结 前言 提示:以下是本篇文章正文内容,下面…...
MySQL中的重要常见知识点(入门到入土!)
基础篇 基础语法 添加数据 -- 完整语法 INSERT INTO 表名 (字段名1, 字段名2, ...) VALUES (值1, 值2, ...);-- 示例 insert into employee(id,workno,name,gender,age,idcard,entrydate) values(1,1,Itcast,男,10,123456789012345678,2000-01-01) 修改数据 -- 完整语法 UPDA…...

理解全景图像拼接
1 3D到2D透视投影 三维空间上点 p 投影到二维空间 q 有两种方式:1)正交投影,2)透视投影。 正交投影直接舍去 z 轴信息,该模型仅在远心镜头上是合理的,或者对于物体深度远小于其到摄像机距离时的近似模型。…...

云原生安全基石:Linux进程隔离技术详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 进程隔离是操作系统通过内核机制将不同进程的运行环境和资源访问范围隔离开的技术。其核心目标在于: 资源独占:确保…...
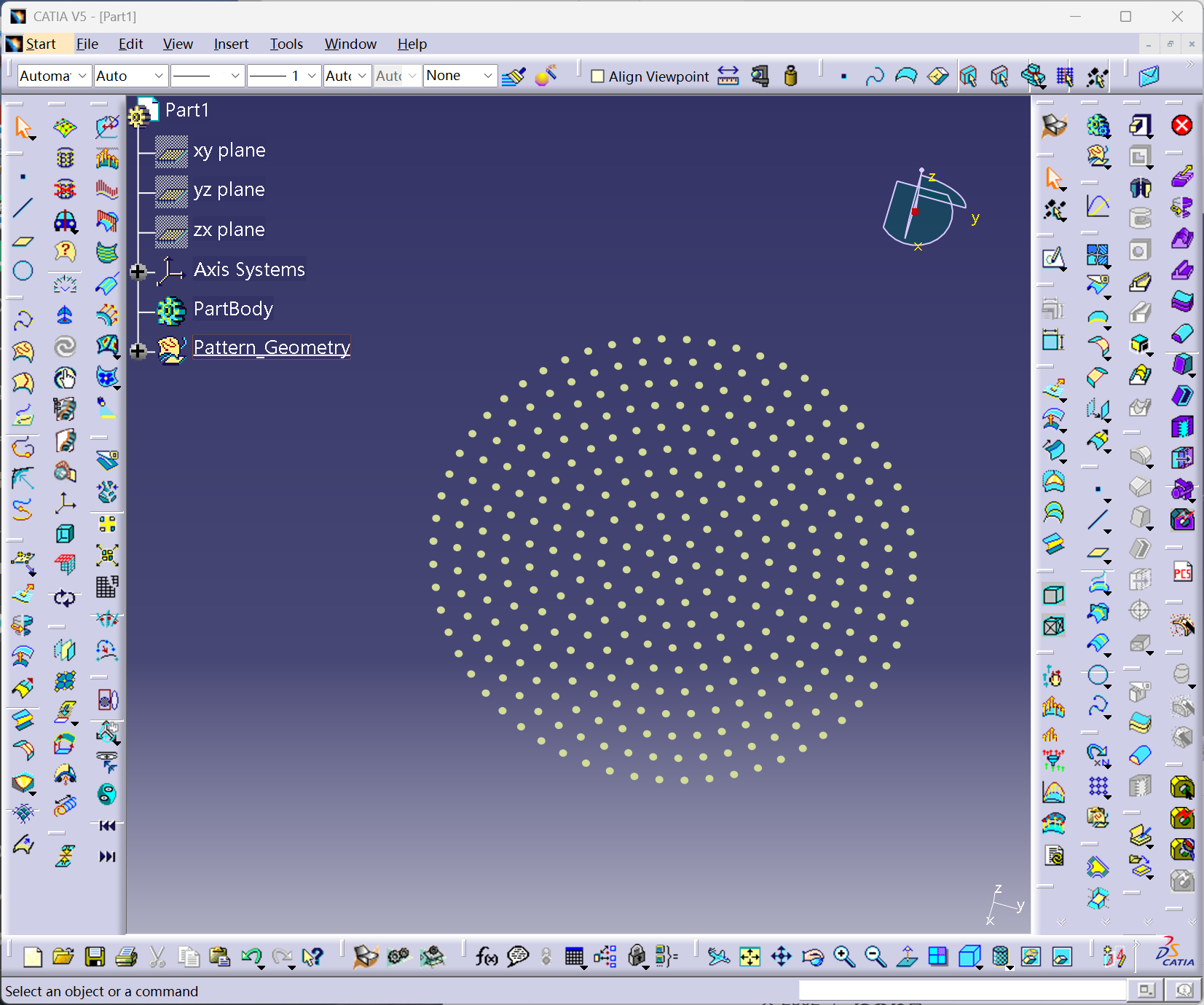
基于PySide6与pycatia的CATIA几何阵列生成器开发实践
引言:参数化设计的工业价值 在航空航天、汽车制造等领域,复杂几何图案的批量生成是模具设计与机械加工的核心需求。传统手动建模方式存在效率低下、参数调整困难等问题。本文基于PySide6+pycatia技术栈,实现了一套支持动态参数配置、智能几何阵列生成的自动…...
Linux学习心得问题总结(三)
day09 文件权限篇 文件权限的属性有哪些?我们应如何理解这些属性? 文件权限的属性包括可读(r)、可写(w)、可执行(x)三种权限,根据文件类型可分为普通文件(.…...

蓝桥杯国14 不完整的算式
!!!!!!!!!!!!!!!理清思路 然后一步步写 问题描述 小蓝在黑板上写了一个形如 AopBC 的算式&#x…...
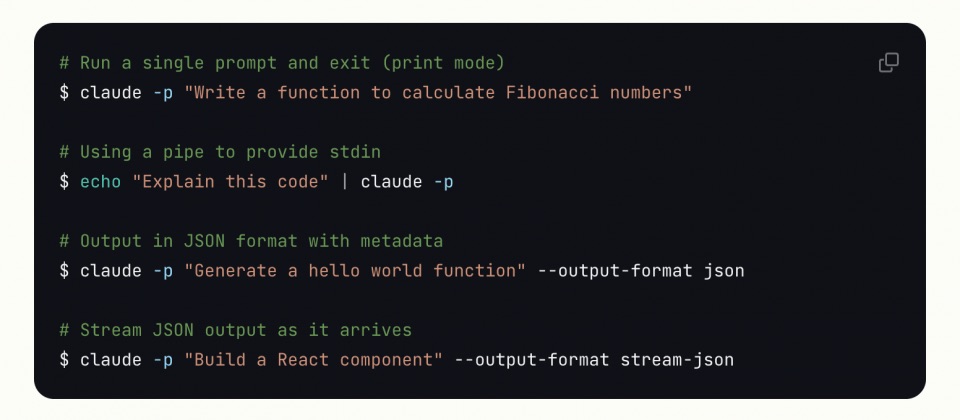
Anthropic推出Claude Code SDK,强化AI助理与自动化开发整合
Anthropic发布Claude Code SDK,协助开发团队将人工智慧助理整合进自动化开发流程,支援多轮对话、MCP协定及多元格式。 Anthropic推出Claude Code SDK,提供开发者与企业一套可程序化整合Claude AI助理至开发流程的工具。此SDK以命令列介面为基…...
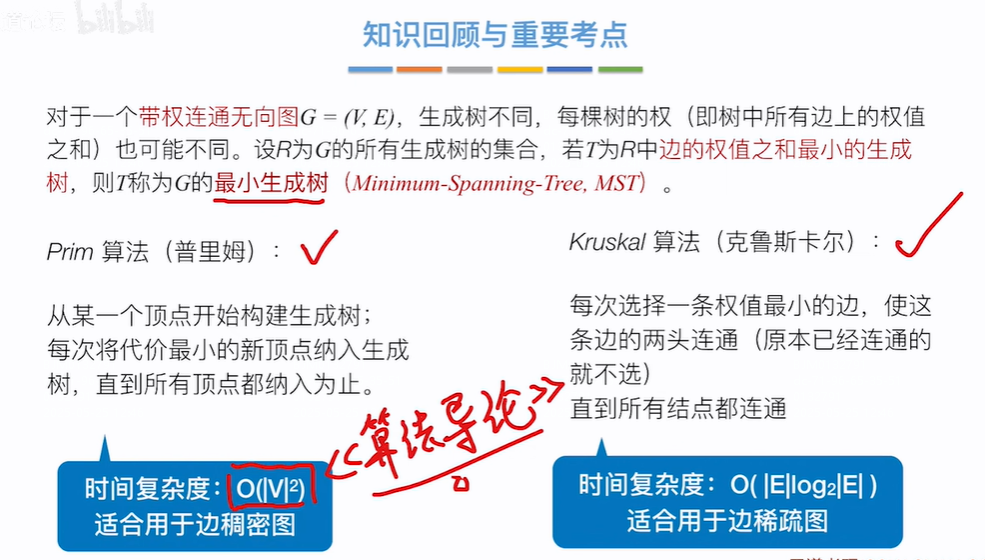
6.4.1最小生成树
知识总览 生成树(一定是连通的): 是连通的无向图的一个子图,子图包含这个无向图的所有顶点有n-1条边(少一条边,生成树就不连通了)即为生成树,一个连通图可能有多个生成树 最小生成树(最小代价树): 只有连通的无向图才…...

DAY 33
知识点回顾: 1. PyTorch和cuda的安装 2. 查看显卡信息的命令行命令(cmd中使用) 3. cuda的检查 4. 简单神经网络的流程 a. 数据预处理(归一化、转换成张量) b. 模型的定义 i. 继承nn.Module类 ii. 定义…...

基于ICEEMDAN-SSA-BP的混合预测模型的完整实现过程
以下将为您详细阐述基于ICEEMDAN-SSA-BP的混合预测模型的完整实现过程,包含原理说明、算法实现、代码解析及优化策略。本教程分为六个核心部分,采用Python 3.9环境开发。 基于ICEEMDAN-SSA-BP的混合时间序列预测模型 一、模型架构设计 1.1 整体流程 #mermaid-svg-o4UD3HaTm…...

常见排序算法详解及其复杂度分析
常见排序算法详解及其复杂度分析 排序算法是数据结构与算法学习中的基础内容,也是面试高频考点。本文将系统介绍几种常见的排序算法,包括它们的原理、时间复杂度、空间复杂度以及 Python 实现方法。 一、冒泡排序(Bubble Sort) …...

DARLR用于具有动态奖励的推荐系统的双智能体离线强化学习(论文大白话)
1. 概述 离线强化学习是现在强化学习研究的一个重点。相比与传统的强化学习它不需要大量的实时交互数据,仅仅依赖历史交互日志就可以进行学习。本文就是将离线强化学习用于推荐系统的一篇文章。 这篇文章主要解决的核心问题有以下几个: 1)…...

第35节:PyTorch与TensorFlow框架对比分析
引言 在深度学习领域,PyTorch和TensorFlow无疑是当前最受欢迎的两大开源框架。 自2015年TensorFlow由Google Brain团队发布,以及2016年Facebook的AI研究团队推出PyTorch以来,这两个框架一直在推动着深度学习研究和工业应用的发展。 本文将从多个维度对这两个框架进行详细对…...

企业级智能体 —— 企业 AI 发展的下一个风口?
在AI技术迅猛发展的当下,企业对AI的应用不断深入。企业级智能体逐渐受到关注,它会是企业AI发展的下一个风口吗?先来看企业典型的AI应用场景,再深入了解企业级智能体。 企业典型AI应用场景 1. 内容生成:2025年…...
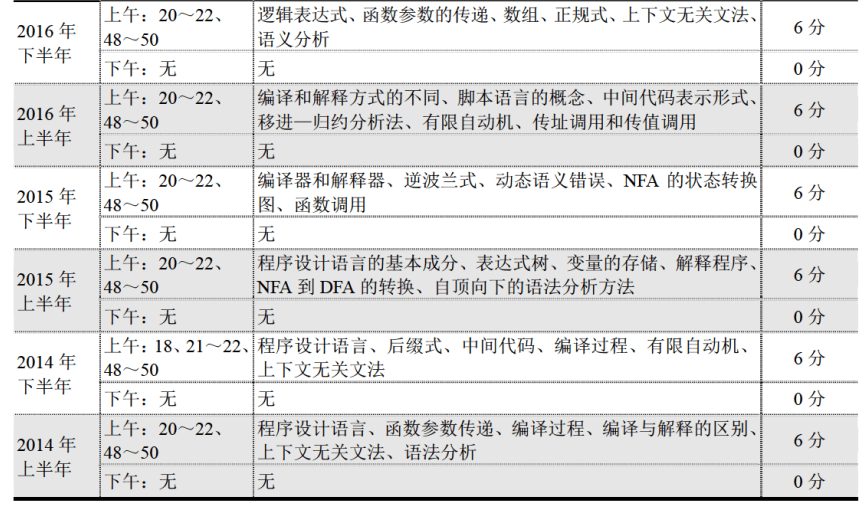
【软考向】Chapter 2 程序设计语言基础知识
程序设计语言概述低级语言 —— 机器指令、汇编语言高级语言 ——翻译:汇编、解释和编译语言处理程序基础 —— 翻译给计算机,汇编、编译、解释三类编译程序基本原理 —— 词法分析、语法分析、语义分析、中间代码生成、代码优化、目标代码生成文法和语言的形式描述确定的有限…...
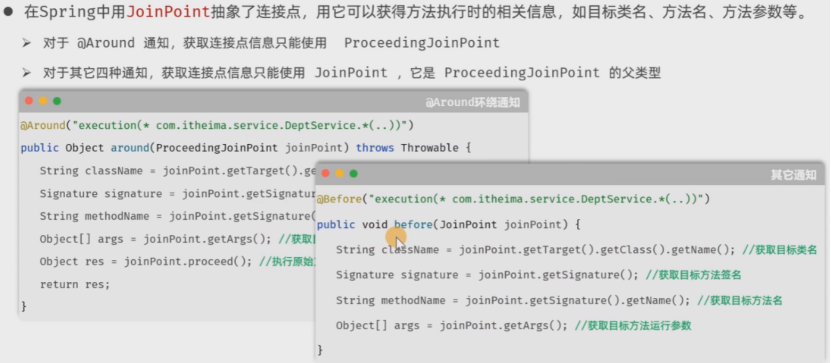
JavaWeb:SpringBootAOP切面实现统计方法耗时和源码解析
介绍 快速入门 1.导入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-aop</artifactId> </dependency>2.切面类java Slf4j Aspect Component public class RecordTimeApsect {/*** 统计耗…...
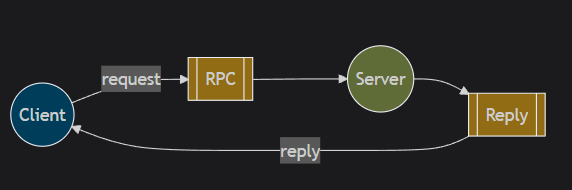
RabbitMQ的其中工作模式介绍以及Java的实现
文章目录 前文一、模式介绍1. 简单模式2. 工作队列模式3. 广播模式4. 路由模式5. 通配符模式6. RPC模式7. 发布确认模式 二、代码实现1、简单模式2、工作队列模式生产者消费者消费者 1消费者 2 3、广播模式 (Fanout Mode)生产者消费者 4、路由模式 (Direct Mode)生产者消费者 5…...