STM32中的SPI通信协议
IIC和SPI的对比
- IIC是半双工的通信,无法同时收发信息;SPI是全双工通讯,可以同时收发信息;
- IIC的通讯协议较复杂,而SPI通讯协议较简单;
- IIC需要通过地址选择从机,而SPI只主要一个引脚即可选中从机;
- IIC的通讯速率一般是100kH左右,而SPI可达50MHz;
- IIC的通讯线较少,而SPI需要较多。
SPI的介绍
什么是SPI ?
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速 全双工 同步的通信总线,并且在芯片上只有四个引脚,同时PCB布线上节省空间,比较方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议,比如 AT91RM9200 。
SPI的物理架构
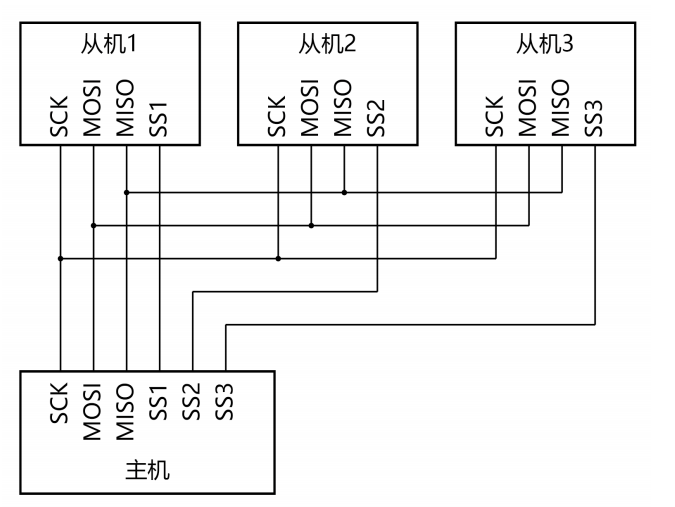
SPI总线包含4个通讯线,分别是 SS , MISO , MOSI , SCL 。他们的 作用 如下:
- MISO – Master Input Slave Output,主设备数据输入,从设备数据输出
- MOSI – Master Output Slave Input,主设备数据输出,从设备数据输入
- SCK – Serial Clock,时钟信号,由主设备产生
- CS – Chip Select,片选信号,由主设备控制
STM32F1 系列芯片有 3 个SPI 接口。
SPI工作原理
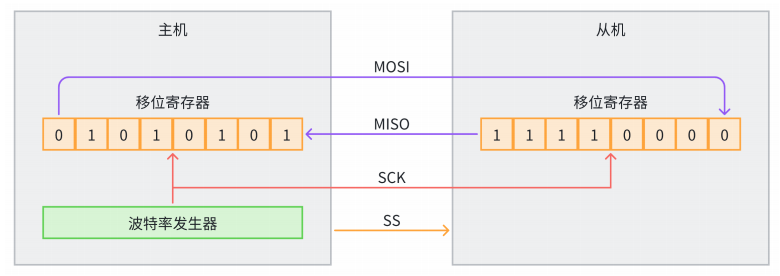
- 上述中是高位先行;
- 习惯上利用0XFF将从机上的数据交换出来。
SPI通信只有主模式和从模式,没有明确的读和写操作之分。实际上,外设的写操作和读操作是同步完成的。在SPI通信中,发送一个数据必然会收到一个数据;如果要接收一个数据,就必须先发送一个数据。
如果只进行写操作,主机可以忽略从设备传输过来的字节,因为主机不需要接收数据。
如果主机要读取从设备的一个字节,那么主机必须发送一个空字节来引发从设备的传输。
说明:(狸猫换太子)
上述中主机和从机 高位先行,主机移位寄存器中,高位移出,其余整体向左移一位;同时,从机中的高位移到主机的低位中的空位,从机其余位向左移一位;主机的高位放到从机移位寄存器中空出来的低位。通过波特率发生器:一个时钟信号主从机中数据交换一位,8个时钟信号后,数据全部交换完成。
具体流程:
SPI 通信中,主机和从机都有一个串行移位寄存器。主机通过向自己的 SPI 串行寄存器写入一个字节来发起传输。
- 首先,拉低相应的 SS 信号线,表示与特定的从机进行通信。
- 主机通过发送 SCLK 时钟信号告诉从机进行数据的读写操作。
- 注意,SCLK 时钟信号可以是低电平有效或高电平有效,因为SPI有不同的模式(下文将介绍)。
- 主机将要发送的数据写入发送数据缓冲区,然后通过移位寄存器逐位地将数据传输给从机的串行移位寄存器,使用 MOSI 信号线进行传输。同时,从机的 MOSI 接口接收到的数据也经过移位寄存器一位一位地移到接收缓冲区。
- 从机也通过 MISO 信号线将自己串行移位寄存器中的内容返回给主机。同时,从机通过MOSI 信号线接收主机发送的数据。这样,两个移位寄存器中的内容就被交换。
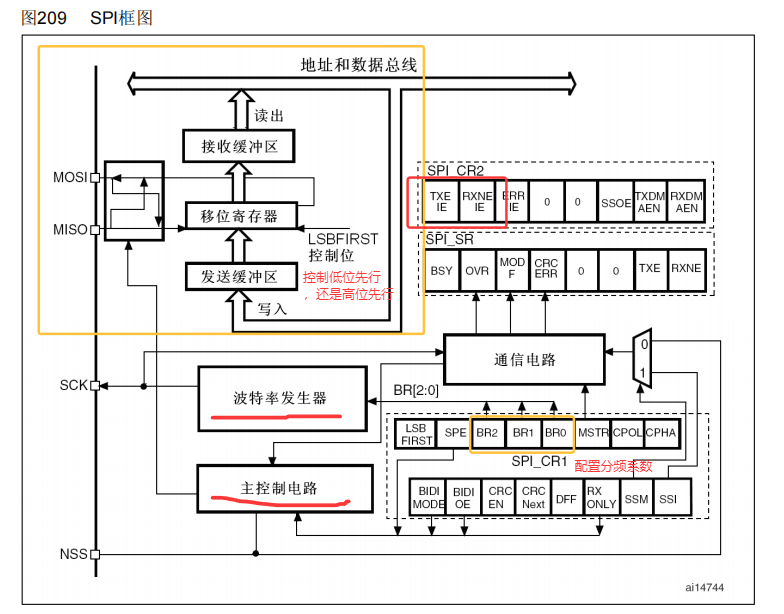
- 框图(参考手册):
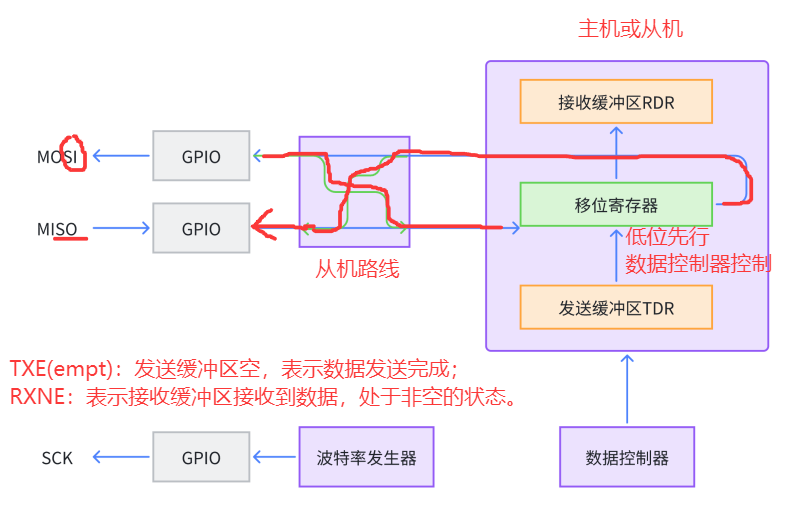
- 简图:
SPI工作模式
时钟极性(CPOL)
没有数据传输时时钟线SCL的空闲状态电平
0:SCK在空闲状态保持低电平
1:SCK在空闲状态保持高电平
时钟相位(CPHA)
时钟线(SCK)在第几个时钟边沿采样数据
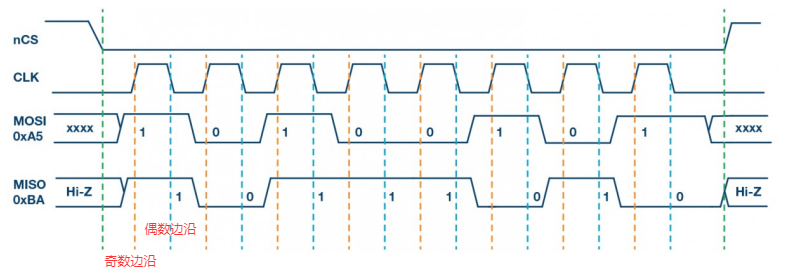
0:SCK在第一个(奇数)边沿进行数据位采样,数据在第一个时钟边沿被锁存;
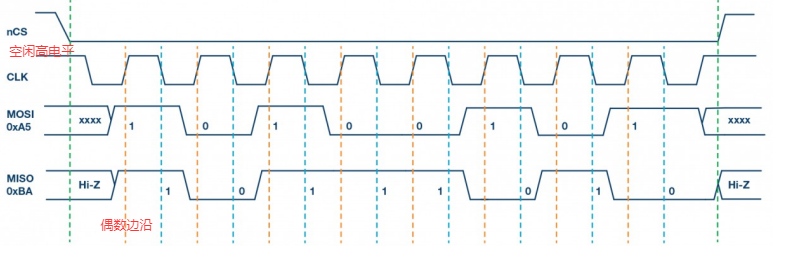
1:SCK的第二个(偶数)边沿进行数据位采样,数据在第二个时钟边沿被锁村。
| SPI 工作模式 | CPOL | CPHA | SCL 空闲状态 | 采样边沿 | 采样时刻 |
| 0 | 0 | 0 | 低电平 | 上升沿 | 奇数边沿 |
| 1 | 0 | 1 | 低电平 | 下降沿 | 偶数边沿 |
| 2 | 1 | 0 | 高电平 | 下降沿 | 奇数边沿 |
| 3 | 1 | 1 | 高电平 | 上升沿 | 偶数边沿 |
注:红色字体是常用的:模式0和模式3
时序图
- 模式0时序图:
- 模式3时序图 :
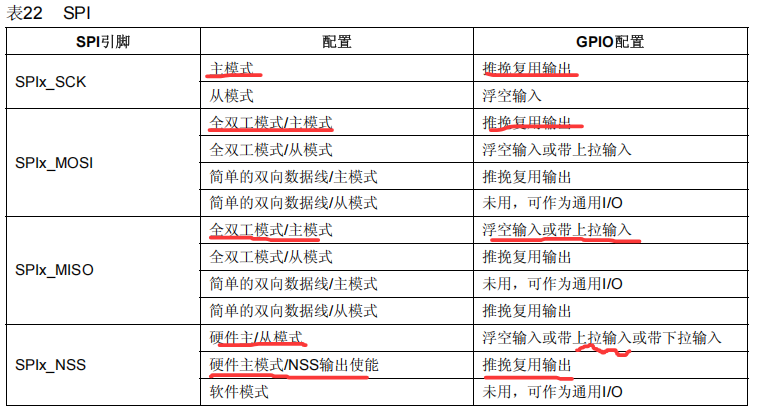
STM32F103板上SPI的引脚
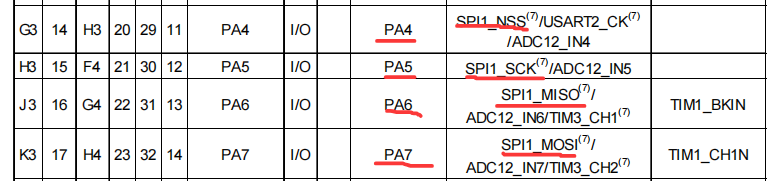
- SPI1引脚:
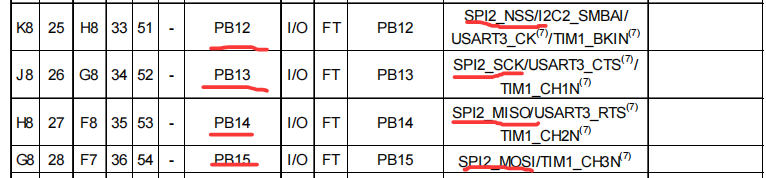
- SPI2引脚:
- SP3引脚
-
STM32F1系列根据Flash和RAM容量分为不同型号:
-
低/中容量(Low/Medium-density):如STM32F103C8T6(64KB Flash),仅支持SPI1和SPI2。
-
高容量(High-density):如STM32F103ZE(512KB Flash),额外支持SPI3。
-
-
SPI3是高容量型号的专属外设,STM32F103C8T6作为中容量型号,硬件上未集成SPI3模块。
SPI寄存器(控制、状态、数据)
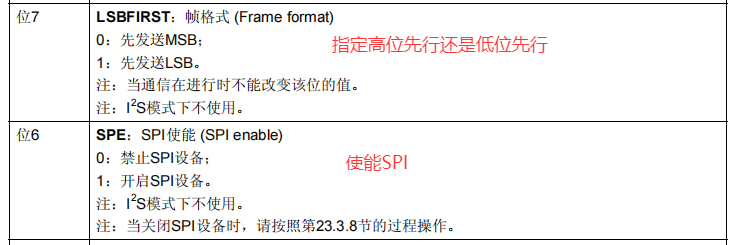
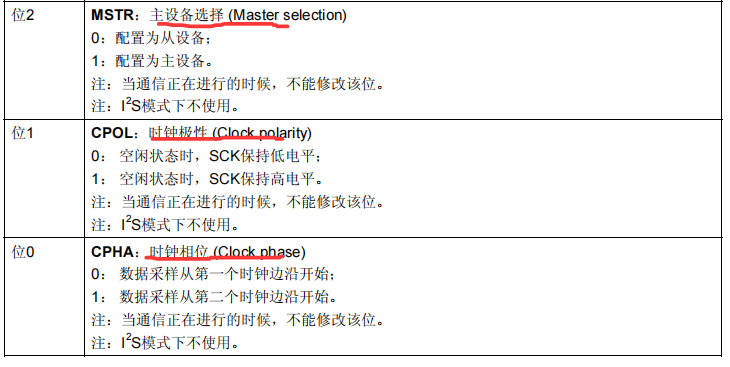
SPI控制寄存器 1(SPI_CR1)(I2 S模式下不使用)





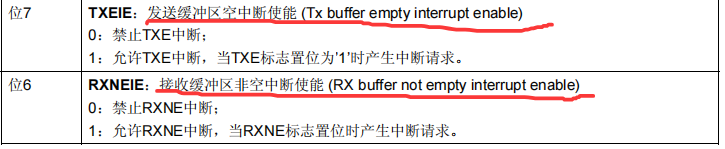
SPI控制寄存器 2(SPI_CR2)

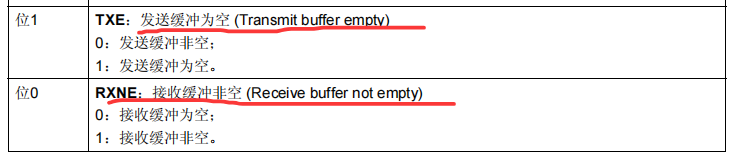
SPI 状态寄存器(SPI_SR)

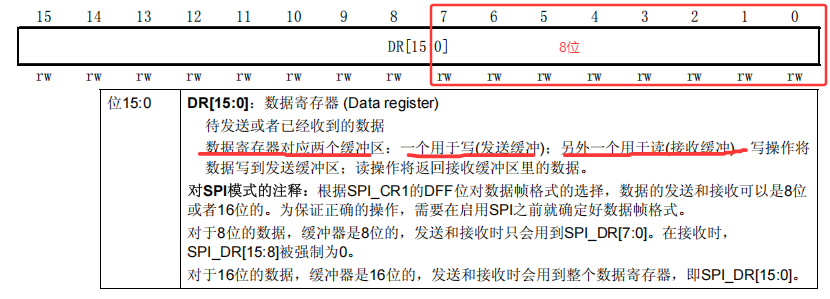
SPI 数据寄存器(SPI_DR)
SPI的库函数(常用的有三个)
初始化SPI的函数:
![]()
![]()
数据发送的函数 :

数据接收的函数:

常用的是:既发送又接受的函数

模块:W25Q128存储器介绍
电脑保存数据的有RAM、ROM、FLASH (类似于硬盘,断电保存的数据不丢失)
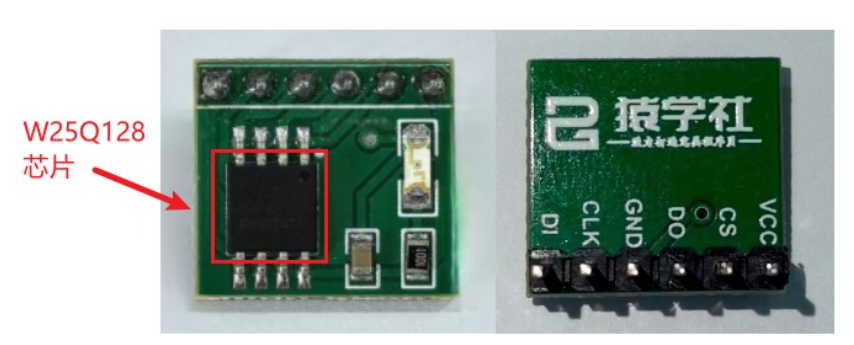
W25Q128是华邦公司推出的一款容量为 128M-bit(相当于 16M-byte)的 SPI 接口的 NOR Flash 芯片。
- NOR Flash:一种非易失性存储器,它可以在断电或掉电后仍然保持存储的数据,因此被广泛应用于长期数据存储。它具有容量大,可重复擦写、按“扇区/块”擦除的特性。Flash 是有一个物理特性:只能写 0 ,不能写 1 ,写 1 靠擦除。(读、改、写)

它还有很多不同容量的好兄弟:
| 型号 | 容量 |
|---|---|
| W25Q256 | 256M bits = 32M bytes |
| W25Q128 | 128M bits = 16M bytes |
| W25Q64 | 64M bits = 8M bytes |
| W25Q32 | 32M bits = 4M bytes |
| W25Q16 | 16M bits = 2M bytes |
| W25Q80 | 8M bits = 1M bytes |
W25Q128模块参数及引脚介绍
参数:
- 产品容量:128M-bit(16M-byte)
- 时钟频率:<=104MHz
- 工作电压:2.7V ~ 3.6V
- 工作温度:-40℃ ~ +85℃
- 支持 SPI 接口
参考接线:
| W25Q128 | STM32 | 备注 |
|---|---|---|
| VCC | 3.3(5.5v会烧掉) | 电源正极 |
| CS | A4 / B12 | 片选信号 |
| DO | A6 / B14 | 输出 |
| GND | G | 电源负极 |
| CLK | A5 / B13 | 时钟信号 |
| DI | A7 / B15 | 输入 |
W25Q128存储架构
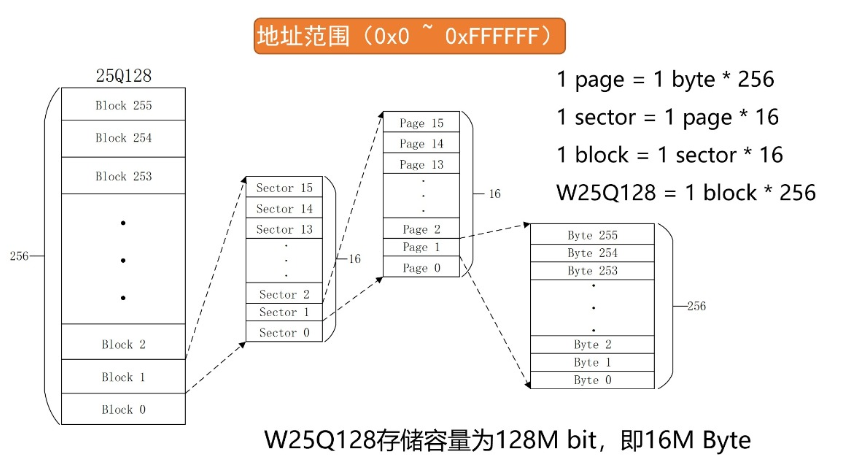
W25Q128 将 16M 的容量分为 256 个块(block),每块 64K 字节;每块分为 16 个扇区(sector),一扇区 4K 字节;每扇区分为 16 个页(page),一页 256 字节。
这里不好理解的话,和书进行类比:
| W25Q128 | 256 个块(block):每块 64K 字节 | 每块16 个扇区:4K 字节 | 每扇区分为 16 个页(page) | 一页 256 字节 |
| 书 | 256 章: 每章64K字 | 每章 16小节:4K 字 | 每一小节有16 页 | 一页 256 字 |
地址范围:
128M-bit = 16M-byte = 16 x 2^10K-byte = 16 x 2^10 x 2^10 byte = 2^24 byte = 16,777,216 个字节。
上述中,一个字节代表一个地址,总共是24位的地址,将2^24的字节数量转化成16进制就是0xFFF FFF。所以,地址范围(0x0~0xFFF FFF)。
W25Q128 的最小擦除单位为一个扇区,也就是每次必须擦除 4K 个字节。这样我们需要给 W25Q128 开辟一个至少 4K 的缓存区。
W25Q128常用指令
| 指令(HEX) | 名称 | 作用 |
|---|---|---|
| 0x06 | 写使能 | 写入数据/擦除之前,必须先发送该指令 |
| 0x05 | 读 SR1 | 判定 FLASH 是否处于空闲状态,擦除用 |
| 0x03 | 读数据 | 读取数据 |
| 0x02 | 页写 | 写入数据,最多写256字节 |
| 0x20 | 扇区擦除 | 扇区擦除指令,最小擦除单位 |
具体工作时序如下:
- 写使能 (06H)
执行页写,扇区擦除,块擦除,片擦除,写状态寄存器等指令前,需要写使能。
拉低 CS 片选 → 发送 06H → 拉高 CS 片选
- 读SR1(05H)
拉低 CS 片选 → 发送 05H → 返回SR1的值 → 拉高 CS 片选
- 读数据(03H)
拉低 CS 片选 → 发送 03H → 发送24位地址 (封装函数)→ 读取数据(1~n)→ 拉高 CS 片选
- 页写 (02H)
页写命令最多可以向FLASH传输256个字节的数据。
写使能->拉低 CS 片选 → 发送 02H → 发送24位地址 → 发送数据(1~n)→ 拉高 CS 片选
- 扇区擦除(20H)
写入数据前,检查内存空间是否全部都是 0xFF ,不满足需擦除。
写使能 - 等待空闲-拉低 CS 片选 → 发送擦除 20H→ 发送24位地址 → 拉高 CS 片选-等待空闲
W25Q128状态寄存器
W25Q128 一共有 3 个状态寄存器,它们的作用是跟踪芯片的状态。
这里我们只介绍常用的状态寄存器 1:
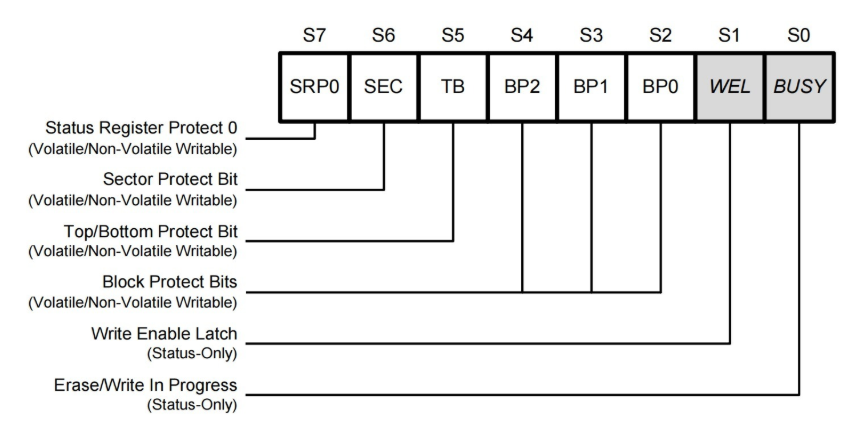
我们需要记住的是在状态寄存器 1 中:
BUSY:指示当前的状态,0 表示空闲;1 表示忙碌。
WEL:写使能锁定,为 1 时,可以操作页/扇区/块;为 0 时,写禁止。
小实验1:W25Q128的实验(封装SPI接口)
实验目的:
读写W25Q128
硬件清单:
W25Q128、开发板、ST-Link、USB转TTL
硬件接线:
| STM32 | W25Q128 |
| PA4 | CS |
| PA5 | CLK |
| PA6 | DO |
| PA7 | DI |
| 3V3 | VCC |
| GND | GND |
w25q128.c文件代码:
流程:
- 初始化SPI的函数;
- 初始化SPI各个引脚的函数;注意各引脚要求的输入输出模式。
- 封装一个发送和接受一个字节的函数:利用HAL_SPI_TransmitRecive()函数实现。
#include "w25q128.h"SPI_HandleTypeDef spi_handle = {0};
void w25q128_spi_init(void){spi_handle.Instance = SPI1;spi_handle.Init.Mode = SPI_MODE_MASTER; //配置成主模式还是从模式spi_handle.Init.Direction = SPI_DIRECTION_2LINES; //配置全双工还是半双工spi_handle.Init.DataSize = SPI_DATASIZE_8BIT; //数据的长度:8bitspi_handle.Init.CLKPolarity = SPI_POLARITY_LOW; //CPOL = 0spi_handle.Init.CLKPhase = SPI_PHASE_1EDGE; //CPHA = 奇数边沿检测spi_handle.Init.NSS = SPI_NSS_SOFT; //软件控制SS引脚配置spi_handle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //波特率分频 :256spi_handle.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位先行还是低位先行:高位先行//下面这三个先不需要考虑spi_handle.Init.TIMode = SPI_TIMODE_DISABLE;spi_handle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;spi_handle.Init.CRCPolynomial = 7;HAL_SPI_Init(&spi_handle);
}void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi){if(hspi->Instance == SPI1){__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_SPI1_CLK_ENABLE();GPIO_InitTypeDef gpio_initstruct;//NSS引脚gpio_initstruct.Pin = GPIO_PIN_4;gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;gpio_initstruct.Pull = GPIO_PULLUP;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//SCL引脚和输出引脚gpio_initstruct.Pin = GPIO_PIN_5 |GPIO_PIN_7;gpio_initstruct.Mode = GPIO_MODE_AF_PP;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//输入引脚gpio_initstruct.Pin = GPIO_PIN_6;gpio_initstruct.Mode = GPIO_MODE_INPUT;HAL_GPIO_Init(GPIOA,&gpio_initstruct);}
}uint8_t w25q128_spi_swap_byte(uint8_t data){uint8_t recv_data = 0;HAL_SPI_TransmitReceive(&spi_handle,&data, &recv_data,1,1000); ///size:尺寸代表是多少个字节return recv_data;
}
小实验2:封装读取芯片ID接口
文件代码:(在实验1的基础上添加)
- 发送的指令:
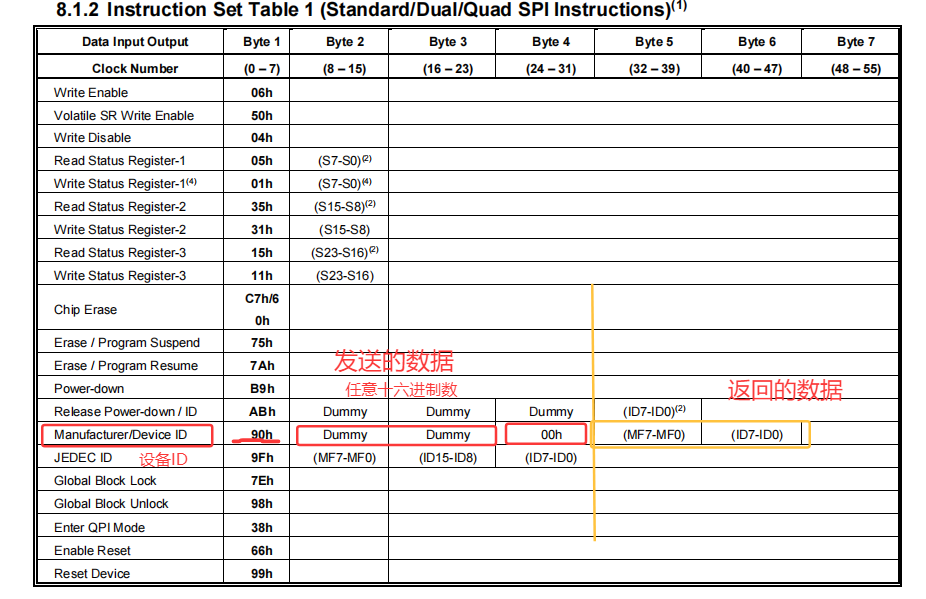
- 返回的数据
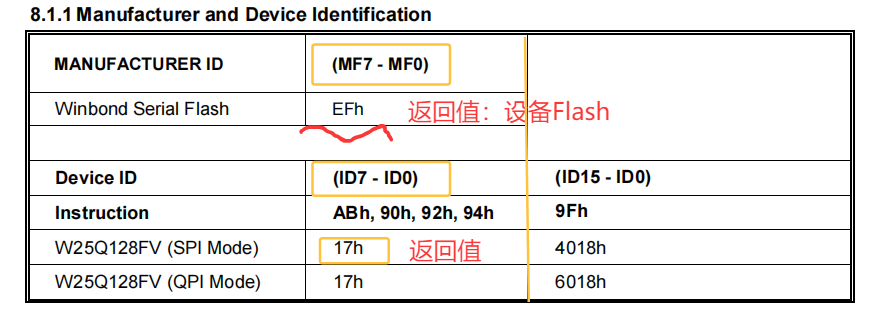
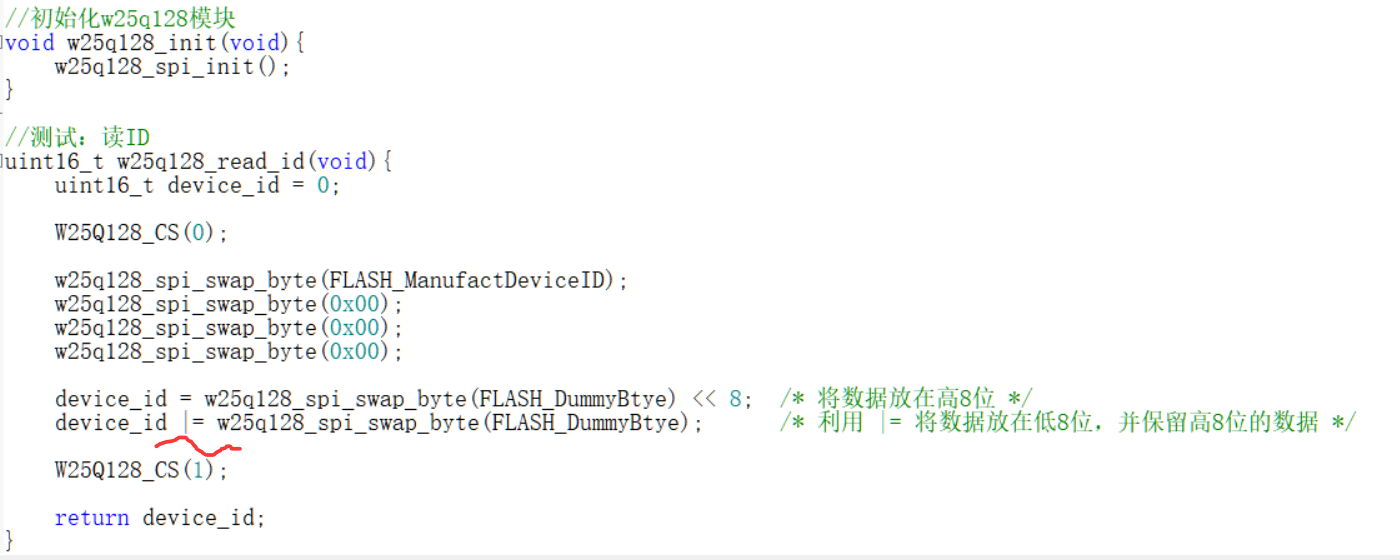
- 上述中,发送的字节:FLASH_ManufactureDivceID是 0x90。
- 上述,由于返回的是两个八位的数,将其保存在一个16位的变量中,因此使用位运算符。
小实验3:读写W25Q128(封装命令接口)
文件代码:
- w25q128.c文件代码:
代码配置流程:
- 初始化spi函数;
- 初始化GPIO的函数MspInit();
- 封装数据交换的函数;HAL_SPI_TransmitRecive ( )。
- 接下来封装指令的函数:使能、读状态寄存器1(判断busy位,封装等待空闲的函数while())、读数据、页写、擦除等指令。
- 在主函数中:擦除、写数据、读数据。
#include "w25q128.h"SPI_HandleTypeDef spi_handle = {0};
void w25q128_spi_init(void){spi_handle.Instance = SPI1;spi_handle.Init.Mode = SPI_MODE_MASTER; //配置成主模式还是从模式spi_handle.Init.Direction = SPI_DIRECTION_2LINES; //配置全双工还是半双工spi_handle.Init.DataSize = SPI_DATASIZE_8BIT; //数据的长度:8bitspi_handle.Init.CLKPolarity = SPI_POLARITY_LOW; //CPOL = 0spi_handle.Init.CLKPhase = SPI_PHASE_1EDGE; //CPHA = 奇数边沿检测spi_handle.Init.NSS = SPI_NSS_SOFT; //软件控制SS引脚配置spi_handle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //波特率分频 :256spi_handle.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位先行还是低位先行:高位先行//下面这三个先不需要考虑spi_handle.Init.TIMode = SPI_TIMODE_DISABLE;spi_handle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;spi_handle.Init.CRCPolynomial = 7;HAL_SPI_Init(&spi_handle);
}void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi){if(hspi->Instance == SPI1){__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_SPI1_CLK_ENABLE();GPIO_InitTypeDef gpio_initstruct;//NSS引脚gpio_initstruct.Pin = GPIO_PIN_4;gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;gpio_initstruct.Pull = GPIO_PULLUP;gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//SCL引脚和输出引脚gpio_initstruct.Pin = GPIO_PIN_5 |GPIO_PIN_7;gpio_initstruct.Mode = GPIO_MODE_AF_PP;HAL_GPIO_Init(GPIOA,&gpio_initstruct);//输入引脚gpio_initstruct.Pin = GPIO_PIN_6;gpio_initstruct.Mode = GPIO_MODE_INPUT;HAL_GPIO_Init(GPIOA,&gpio_initstruct);}
}uint8_t w25q128_spi_swap_byte(uint8_t data){uint8_t recv_data = 0;HAL_SPI_TransmitReceive(&spi_handle,&data, &recv_data,1,1000); ///size:尺寸代表是多少个字节return recv_data;
}//初始化w25q128模块
void w25q128_init(void){w25q128_spi_init();
}//测试:读ID
uint16_t w25q128_read_id(void){uint16_t device_id = 0;W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_ManufactDeviceID);w25q128_spi_swap_byte(0x00);w25q128_spi_swap_byte(0x00);w25q128_spi_swap_byte(0x00);device_id = w25q128_spi_swap_byte(FLASH_DummyBtye) << 8; /* 将数据放在高8位 */device_id |= w25q128_spi_swap_byte(FLASH_DummyBtye); /* 利用 |= 将数据放在低8位,并保留高8位的数据 */W25Q128_CS(1);return device_id;
}//写使能void w25q128_write_enable(void)
{W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_WriteEable);W25Q128_CS(1);
}//读SR1寄存器
uint8_t w25q128_read_sr1(void){uint8_t recv_data = 0;W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_ReadStatusReg1);recv_data = w25q128_spi_swap_byte(FLASH_DummyBtye);W25Q128_CS(1);return recv_data;
}//发送地址的函数
void w25q128_send_address(uint32_t address){ //地址是3个字节,先发送高位,在发送中位,最后发送低位w25q128_spi_swap_byte(address >> 16);//高位w25q128_spi_swap_byte(address >> 8); //中位:由于函数是一个8位的,因此,移动后数据后,高位自动去掉。w25q128_spi_swap_byte(address);
}//忙等待的函数
void w25q128_wait_busy(void){while ((w25q128_read_sr1() & 0x01) == 0x01); //判断最后一位是不是1
}//读数据
void w25q128_read_data(uint32_t address,uint8_t *data,uint32_t size){uint32_t i = 0;W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_ReadDate);w25q128_send_address(address);for(i = 0;i< size; i++)data[i] = w25q128_spi_swap_byte(FLASH_DummyBtye);W25Q128_CS(1);}
//页写:写的是256个字节,
void w25q128_write_page(uint32_t address,uint8_t *data,uint16_t size){ //代表的是字节数量uint16_t i = 0;w25q128_write_enable();W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_PageProgram);w25q128_send_address(address);for(i = 0;i < size; i++)w25q128_spi_swap_byte(data[i]);W25Q128_CS(1);//忙等待,写入数据是需要花费时间的;看状态寄存器的最后一位是0还是1w25q128_wait_busy();
}
//扇区擦除
void w25q128_erase_sector(uint32_t address){w25q128_write_enable();w25q128_wait_busy();W25Q128_CS(0);w25q128_spi_swap_byte(FLASH_SectorErase);w25q128_send_address(address);W25Q128_CS(1);w25q128_wait_busy();
}
//如何指定变量的数据类型是多少
- w25128.h文件代码
- 定义一个宏函数:读取CS引脚的电平,是高电平还是低电平;
- 将指令表进行宏定义,便于读写方便。
#ifndef __W25Q128_H__
#define __W25Q128_H__
#include "stm32f1xx.h"#define W25Q128_CS(x) do{x ? \HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET): \HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);\}while(0)/* 指令表 */
#define FLASH_ManufactDeviceID 0x90
#define FLASH_WriteEable 0x06
#define FLASH_ReadStatusReg1 0x05
#define FLASH_ReadDate 0x03
#define FLASH_PageProgram 0x02
#define FLASH_SectorErase 0x20
#define FLASH_DummyBtye 0xFF void w25q128_init(void);
uint16_t w25q128_read_id(void);
void w25q128_read_data(uint32_t address,uint8_t *data,uint32_t size);
void w25q128_write_page(uint32_t address,uint8_t *data,uint16_t size);
void w25q128_erase_sector(uint32_t address);
#endif- main.c文件代码
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "uart1.h"
#include "w25q128.h"
uint8_t data_write[4] = {0xAA,0xBB,0xEE,0xDD};
uint8_t data_read[4] = {0};int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */uart1_init(115200);printf("hello,world\r\n");w25q128_init();uint16_t device_id = w25q128_read_id();printf("device_id = %X \r\n",device_id); /* %X是16进制,返回EF17 */w25q128_erase_sector(0x000000);w25q128_write_page(0x000000,data_write,4);w25q128_read_data(0x000000,data_read,4);printf("data_read: %X,%X,%X,%X\r\n",data_read[0],data_read[1],data_read[2],data_read[3]);while(1){}
}总结:
- 相关的位运算符的使用:判断第一位是0 还是 1: & = 0x01、<<、将数据放在高8位 << 8、将数据放在低八位利用 “| =” ;
- 熟悉模块的相关指令;读、写、擦除、读寄存器状态、使能。
相关文章:
STM32中的SPI通信协议
IIC和SPI的对比 IIC是半双工的通信,无法同时收发信息;SPI是全双工通讯,可以同时收发信息;IIC的通讯协议较复杂,而SPI通讯协议较简单;IIC需要通过地址选择从机,而SPI只主要一个引脚即可选中从机…...

从版本控制到协同开发:深度解析 Git、SVN 及现代工具链
前言:在当今软件开发的浪潮中,版本控制与协同开发无疑扮演着举足轻重的角色。从最初的单兵作战到如今大规模团队的高效协作,一套成熟且得力的版本控制系统以及围绕其构建的现代工具链,已然成为推动软件项目稳步前行的关键引擎。今…...
)
redis Pub/Sub 简介 -16 (PUBLISH、SUBSCRIBE、PSUBSCRIBE)
Redis Pub/Sub 简介:PUBLISH、SUBSCRIBE、PSUBSCRIBE Redis Pub/Sub 是一种强大的消息传递范例,可在应用程序的不同部分之间实现实时通信。它是构建可扩展和响应式系统的基石,允许组件在没有直接依赖的情况下进行交互。本章将全面介绍 Redis…...
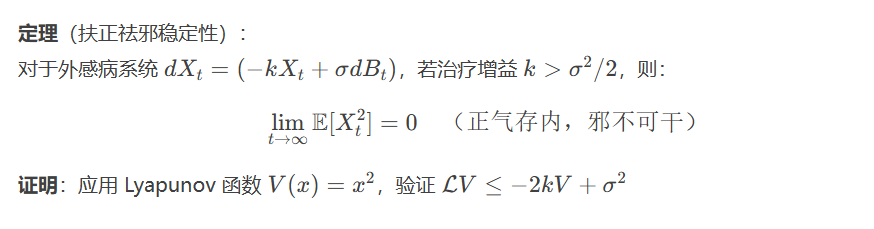
《黄帝内经》数学建模与形式化表征方式的重构
黄帝内经的数学概括:《黄帝内经》数学建模与形式化表征方式的重构 摘要:《黄帝内经》通过现代数学理论如动力系统、代数拓扑和随机过程,被重构为一个形式化的人体健康模型。该模型包括阴阳动力学的微分几何、五行代数的李群结构、经络拓扑与同…...
 技术指南)
PyTorch Image Models (timm) 技术指南
timm PyTorch Image Models (timm) 技术指南功能概述 一、引言二、timm 库概述三、安装 timm 库四、模型加载与推理示例4.1 通用推理流程4.2 具体模型示例4.2.1 ResNeXt50-32x4d4.2.2 EfficientNet-V2 Small 模型4.2.3 DeiT-3 large 模型4.2.4 RepViT-M2 模型4.2.5 ResNet-RS-1…...

基于Scikit-learn与Flask的医疗AI糖尿病预测系统开发实战
引言 在精准医疗时代,人工智能技术正在重塑临床决策流程。本文将深入解析如何基于MIMIC-III医疗大数据集,使用Python生态构建符合医疗AI开发规范的糖尿病预测系统。项目涵盖从数据治理到模型部署的全流程,最终交付符合DICOM标准的临床决策支…...

掌握聚合函数:COUNT,MAX,MIN,SUM,AVG,GROUP BY和HAVING子句的用法,Where和HAVING的区别
对于Java后端开发来说,必须要掌握常用的聚合函数:COUNT,MAX,MIN,SUM,AVG,掌握GROUP BY和HAVING子句的用法,掌握Where和HAVING的区别: ✅ 一、常用聚合函数(聚…...

【Node.js】高级主题
个人主页:Guiat 归属专栏:node.js 文章目录 1. Node.js 高级主题概览1.1 高级主题架构图 2. 事件循环与异步编程深度解析2.1 事件循环机制详解事件循环阶段详解 2.2 异步编程模式演进高级异步模式实现 3. 内存管理与性能优化3.1 V8 内存管理机制内存监控…...
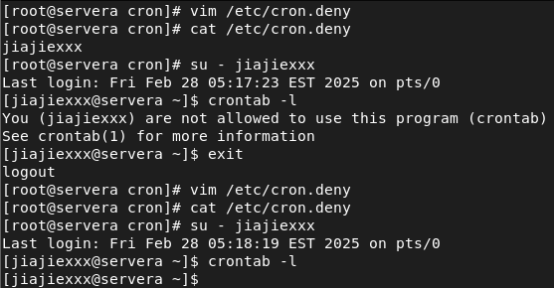
【Linux】定时任务 Crontab 与时间同步服务器
目录 一、用户定时任务的创建与使用 1.1 用户定时任务的使用技巧 1.2 管理员对用户定时任务的管理 1.3 用户黑白名单的管理 一、用户定时任务的创建与使用 1.1 用户定时任务的使用技巧 第一步:查看服务基本信息 systemctl status crond.service //查看周期性…...
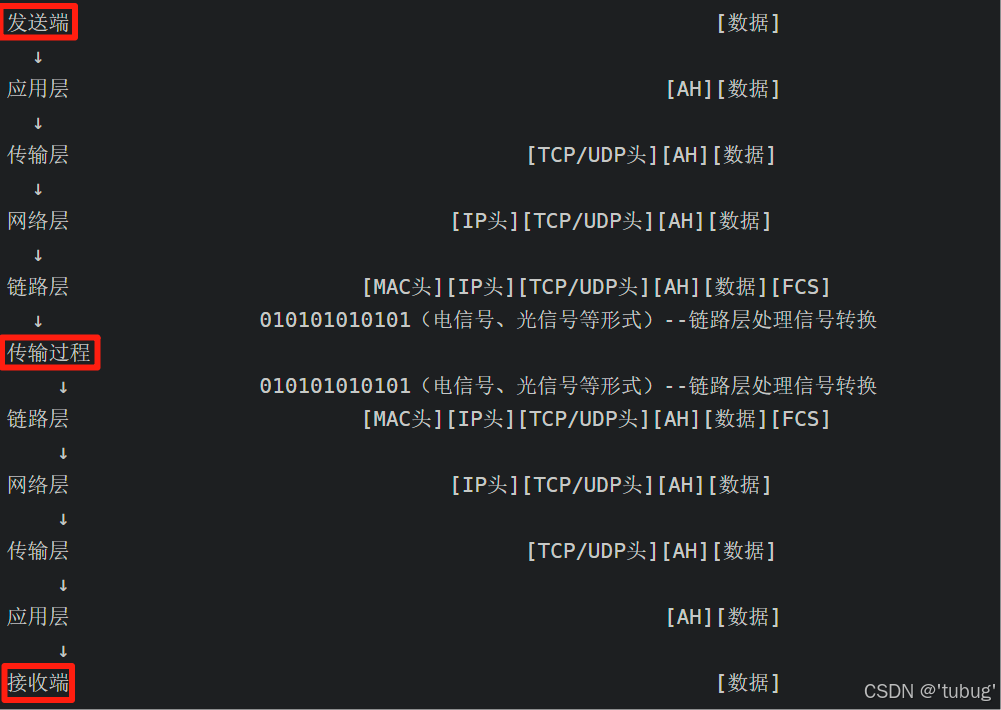
【TCP/IP协议族详解】
目录 第1层 链路/网络接口层—帧(Frame) 1. 链路层功能 2. 常见协议 2.1. ARP(地址解析协议) 3. 常见设备 第2层 网络层—数据包(Packet) 1. 网络层功能 2. 常见协议 2.1. ICMP(互联网…...
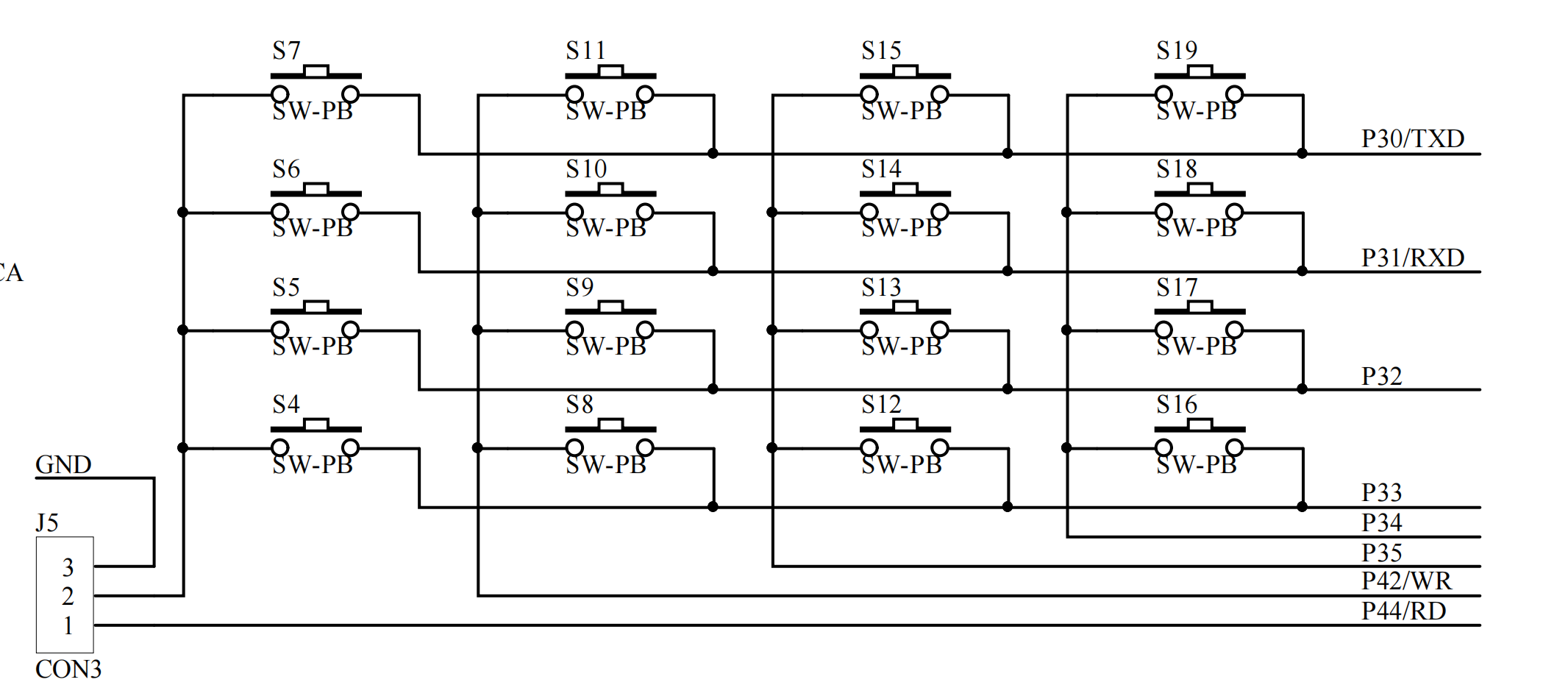
蓝桥杯电子赛_零基础利用按键实现不同数字的显现
目录 一、前提 二、代码配置 bsp_key.c文件 main.c文件 main.c文件的详细讲解 功能实现 注意事项 一、前提 按键这一板块主要是以记忆为主,我直接给大家讲解代码去实现我要配置的功能。本次我要做的项目是板子上的按键有S4~S19,我希望任意一个按键…...
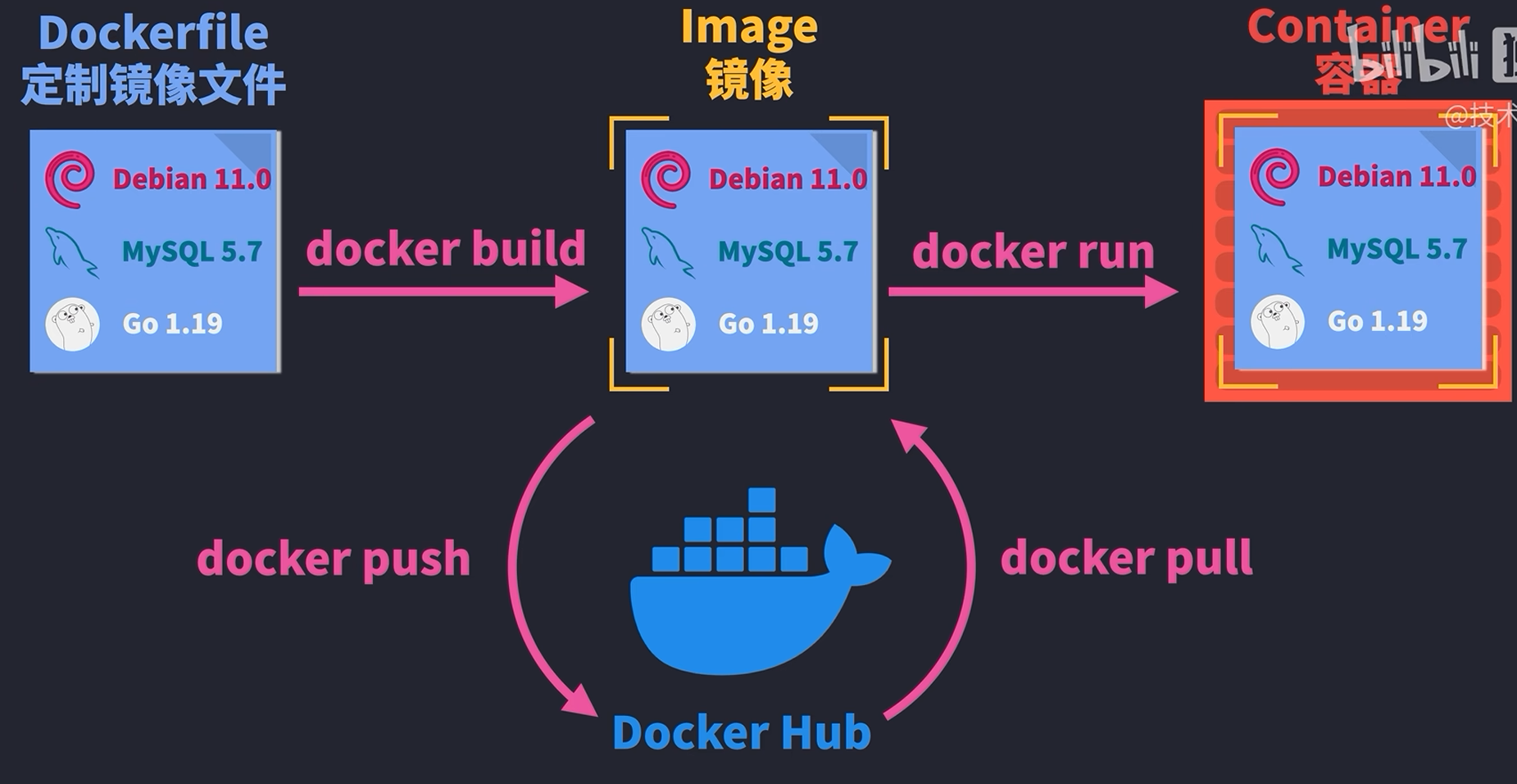
Docker架构详解
一,Docker的四大要素:Dockerfile、镜像(image)、容器(container)、仓库(repository) 1.dockerfile:在dockerfile文件中写构建docker的命令,通过dockerbuild构建image 2.镜像:就是一个只读的模板,镜像可以用来创建docker容器&…...
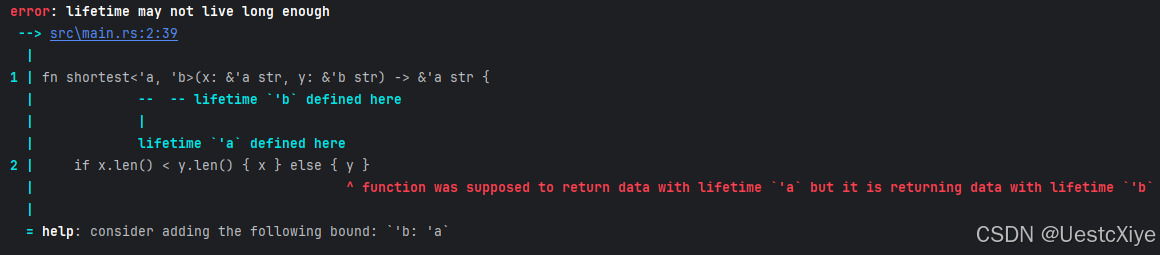
Rust 学习笔记:关于生命周期的练习题
Rust 学习笔记:关于生命周期的练习题 Rust 学习笔记:关于生命周期的练习题生命周期旨在防止哪种编程错误?以下代码能否通过编译?若能,输出是?如果一个引用的生命周期是 static,这意味着什么&…...
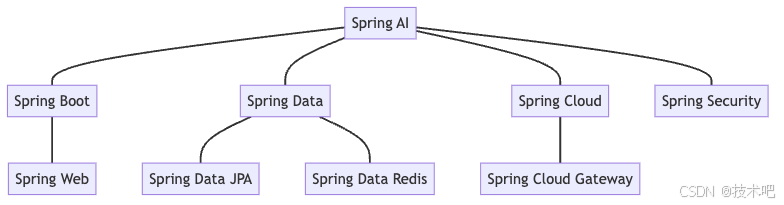
Spring AI 模块架构与功能解析
Spring AI 是 Spring 生态系统中的一个新兴模块,专注于简化人工智能和机器学习技术在 Spring 应用程序中的集成。本文将详细介绍 Spring AI 的核心组件、功能模块及其之间的关系,帮助具有技术基础的读者快速了解和应用 Spring AI。 Spring AI 的核心概念…...

单元测试学习笔记
单元测试是软件测试的基础层级,主要针对代码的最小可测试单元进行验证。单元测试可以帮助快速定位问题边界,提升代码可维护性,支持安全的重构操作。 测试对象: 独立函数/方法纯工具类(如数据处理函数)UI组…...
多模态大语言模型arxiv论文略读(九十)
Hybrid RAG-empowered Multi-modal LLM for Secure Data Management in Internet of Medical Things: A Diffusion-based Contract Approach ➡️ 论文标题:Hybrid RAG-empowered Multi-modal LLM for Secure Data Management in Internet of Medical Things: A Di…...

(1-6-1)Java 集合
目录 0.知识概述: 1.集合 1.1 集合继承关系类图 1.2 集合遍历的三种方式 1.3 集合排序 1.3.1 Collections实现 1.3.2 自定义排序类 2 List 集合概述 2.1 ArrayList (1)特点 (2)常用方法 2.2 LinkedList 3…...

spring5-配外部文件-spEL-工厂bean-FactoryBean-注解配bean
spring配外部文件 我们先在Spring里配置一个数据源 1.导c3p0包,这里我们先学一下hibernate持久化框架,以后用mybites. <dependency><groupId>org.hibernate</groupId><artifactId>hibernate-core</artifactId><version>5.2.…...

[安全清单] Linux 服务器安全基线:一份可以照着做的加固 Checklist
更多服务器知识,尽在hostol.com 嘿,各位服务器的“守护者”们!当你拿到一台崭新的Linux服务器,或者接手一台正在运行的服务器时,脑子里是不是会闪过一丝丝关于安全的担忧?“我的服务器安全吗?”…...

企业级单元测试流程
企业级的单元测试流程不仅是简单编写测试用例,而是一整套系统化、自动化、可维护、可度量的工程实践,贯穿从代码编写到上线部署的全生命周期。下面是一个尽可能完善的 企业级单元测试流程设计方案,适用于 Java 生态(JUnit Mockit…...

安卓开发用到的设计模式(2)结构型模式
安卓开发用到的设计模式(2)结构型模式 文章目录 安卓开发用到的设计模式(2)结构型模式1. 适配器模式(Adapter Pattern)2. 装饰器模式(Decorator Pattern)3. 代理模式(Pro…...
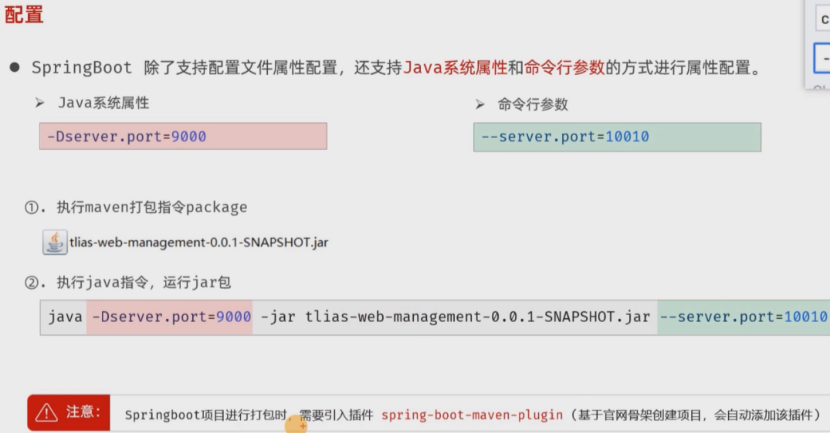
JavaWeb:SpringBoot配置优先级详解
3种配置 打包插件 命令行 优先级 SpringBoot的配置优先级决定了不同配置源之间的覆盖关系,遵循高优先级配置覆盖低优先级的原则。以下是详细的优先级排序及配置方法说明: 一、配置优先级从高到低排序 1.命令行参数 优先级最高,通过keyvalu…...
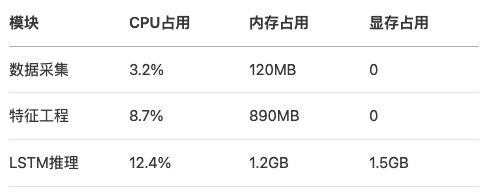
故障率预测:基于LSTM的GPU集群硬件健康监测系统(附Prometheus监控模板)
一、GPU集群健康监测的挑战与价值 在大规模深度学习训练场景下,GPU集群的硬件故障率显著高于传统计算设备。根据2023年MLCommons统计,配备8卡A100的服务器平均故障间隔时间(MTBF)仅为1426小时,其中显存故障占比达38%&…...
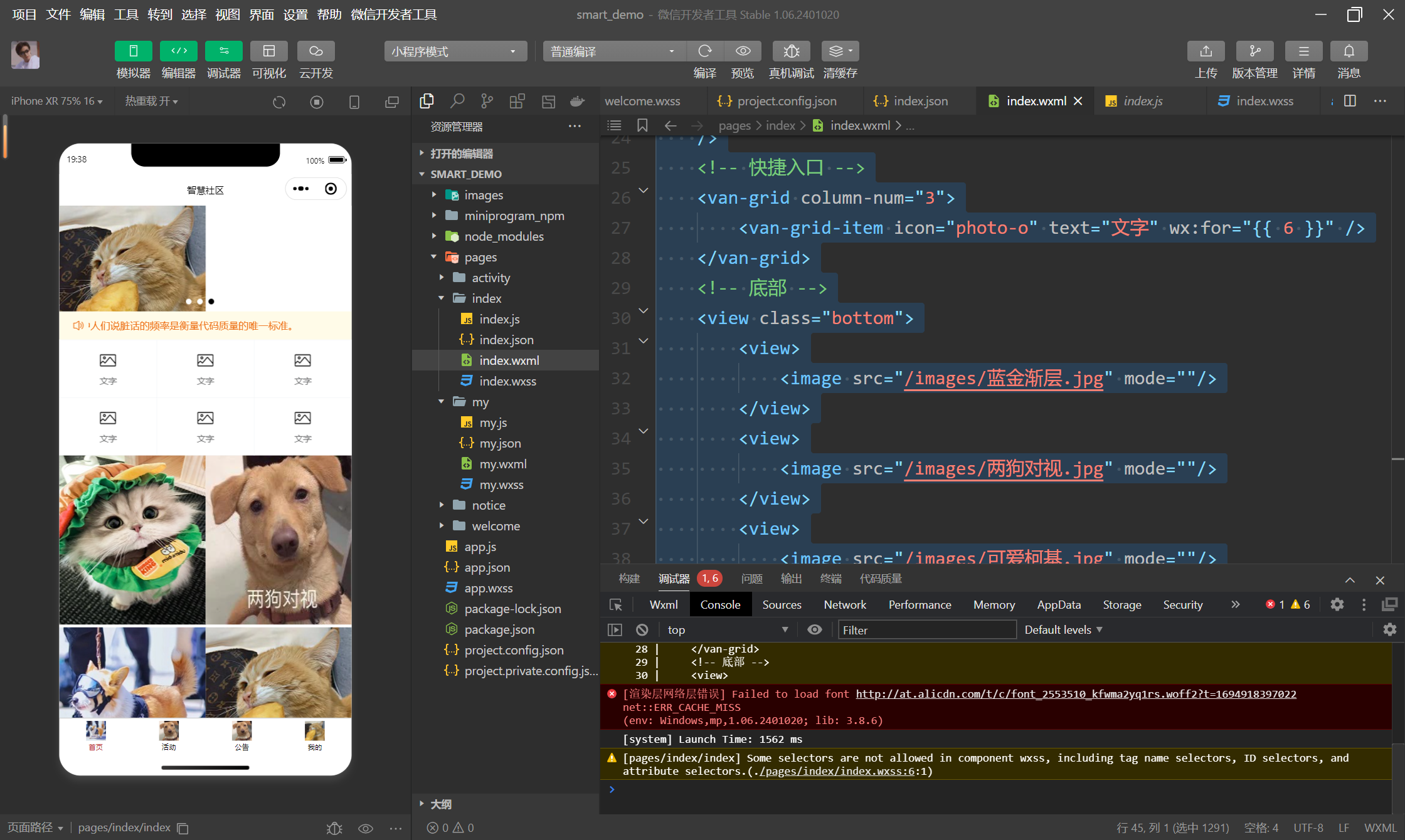
【b站计算机拓荒者】【2025】微信小程序开发教程 - chapter3 项目实践 -1 项目功能描述
1 项目功能描述 # 智慧社区-小程序-1 欢迎页-加载后端:动态变化-2 首页-轮播图:动态-公共栏:动态-信息采集,社区活动,人脸检测,语音识别,心率检测,积分商城-3 信息采集页面-采集人数…...

FFmpeg 安装包全攻略:gpl、lgpl、shared、master 区别详解
这些 FFmpeg 安装包有很多版本和变种,主要区别在于以下几个方面: ✅ 一、从名称中看出的关键参数: 1. 版本号 master:开发版,最新功能,但可能不稳定。n6.1 / n7.1:正式版本,更稳定…...

AI浪潮下,媒体内容运营的五重变奏
算法驱动的个性化推荐 在信息爆炸的时代,用户面临着海量的内容选择,如何让用户快速找到感兴趣的人工智能内容,成为媒体运营的关键。算法驱动的个性化推荐模式应运而生,它通过分析用户的行为数据,如浏览历史、点赞、评论、搜索关键词等,构建用户兴趣画像 ,再依据画像为用…...
WindTerm 以 SSH 协议的方式通过安恒明御堡垒机间接访问服务器
1. 配置堡垒机秘钥 创建公私钥ssh-keygen -t rsa -b 4096执行完该命令后按照提示一路回车就能够创建出公私钥注意:在创建过程中会让你指定秘钥的存储位置以及对应的密码,最好自行指定一下 id_rsa 是私钥id_rsa.pub 是公钥 在堡垒机中指定创建好的私钥 …...
通过现代数学语言重构《道德经》核心概念体系,形成一个兼具形式化与启发性的理论框架
以下是对《道德经》的数学转述尝试,通过现代数学语言重构其核心概念,形成一个兼具形式化与启发性的理论框架: 0. 基础公理体系 定义: 《道德经》是一个动态宇宙模型 U(D,V,Φ),其中: D 为“道”的无限维…...
邂逅Node.js
首先先要来学习一下nodejs的基础(和后端开发有联系的) 再然后的学习路线是学习npm,yarn,cnpm,npx,pnpm等包管理工具 然后进行模块化的使用,再去学习webpack和git(版本控制工具&…...
学习路线)
计算机视觉(图像算法工程师)学习路线
计算机视觉学习路线 Python基础 常量与变量 列表、元组、字典、集合 运算符 循环 条件控制语句 函数 面向对象与类 包与模块Numpy Pandas Matplotlib numpy机器学习 回归问题 线性回归 Lasso回归 Ridge回归 多项式回归 决策树回归 AdaBoost GBDT 随机森林回归 分类问题 逻辑…...