【ROS2实体机械臂驱动】rokae xCoreSDK Python测试使用
【ROS2实体机械臂驱动】rokae xCoreSDK Python测试使用
文章目录
- 前言
- 正文
- 配置环境
- 下载源码
- 配置环境变量
- 测试运行
- 修改点说明
- 实际运行情况
- 参考
前言
本文用来记录 xCoreSDK-Python的调用使用1。
正文
配置环境
配置开发环境,这里使用conda做python环境管理,安装可以参考
anaconda、miniconda、conda的关系及miniconda安装-CSDN博客2
初始化python环境,根据sdk的说明,依赖于python3.8环境
# 创建环境
$ conda create --name xCorePy python=3.8# 激活虚拟环境
$ conda activate xCorePy# 配置镜像源加速
$ pip config set global.index-url https://mirrors.aliyun.com/pypi/simple
下载源码
这里一定要使用git lfs下载源码,内部有几个so文件是使用lfs保存的。
$ mkdir -p ~/workspace/rokae_projects
$ cd ~/workspace/rokae_projects
$ git lfs clone https://github.com/RokaeRobot/xCoreSDK-Python.git
$ cd xCoreSDK-Python
配置环境变量
$ export PYTHONPATH=/home/dev/workspace/rokae_projects/xCoreSDK-Python/rokae_SDK_linux_v0.1.6_py38/lib:$PYTHONPATH
测试运行
注意: 应将库文件所在路径添加至运行脚本可识别的路径中。将脚本中的ip修改为连接机器人所设置的ip。
提醒: 到这一步发现robot.connectToRobot(ec)没有权限,需要找厂家要license,可以找买机械臂的代理,拿到后自行插入优盘导入即可。
# 运行 firstexample.py
$ cd ~/workspace/rokae_projects/xCoreSDK-Python/rokae_SDK_linux_v0.1.6_py38/example
$ python firstexample.py
修改点说明
from robot import *
from convert_tools import *
import timefrom math import pi # 增加导入pi定义def waitRobot(robot):running = Truewhile running:time.sleep(0.1)ec = {}st = robot.operationState(ec)if st == rokae.OperationState.idle.value or st == rokae.OperationState.unknown.value:running = Falsedef main():ip = "192.168.8.160" # 修改本地机械臂对应的IP. BingLee 2025.5.28ec = {}# 下述类根据实际机械臂情况自行修改. BingLee 2025.5.28## XMateRobot(ip) # 协作机械臂# xMateErProRobot(ip) # 协作7轴机型# StandardRobot(ip) # 连接工业6轴机型# PCB4Robot(ip) # 连接PCB4轴机型# PCB3Robot(ip) # 连接PCB3轴机型with StandardRobot(ip) as robot: # 这里修改为博主使用的工业臂. BingLee 2025.5.28# 连接机器人robot.connectToRobot(ec)# 设置机器人上下电状态-上电robot.setPowerState(True, ec)# 查询机器人状态power = robot.powerState(ec)print("当前上下电状态为:", power)time.sleep(2)# 设置机器人上下电状态-下电robot.setPowerState(False, ec)power = robot.powerState(ec)print("当前上下电状态为:", power)################################################ 2. 查询信息 ########################################################## 获取机器人的基本信息info = robot.robotInfo(ec)print("机器人轴数:", info["joint_num"], "机型:", info["type"], "控制器版本:", info["version"])# 获取SDK版本print("SDK版本:", robot.sdkVersion(ec))# 获取机器人的上下电状态power = robot.powerState(ec)print("当前上下电状态为:", power)# 获取机器人的操作模式mode = robot.operateMode(ec)print("当前机器人的操作模式为:", mode)# 获取机器人运行状态state = robot.operationState(ec)print("当前机器人的运行状态为:", state)######################################## 3. 获取机器人当前位姿,轴角度,基坐标系等信息 ###################################### 获取关节位置joint_pos = robot.jointPos(ec)print("当前关节位置:", joint_pos)# 获取关节速度joint_vel = robot.jointVel(ec)print("当前关节速度:", joint_vel)# 获取关节力矩joint_torque = robot.jointTorque(ec)print("当前关节力矩:", joint_torque)# 获取法兰位姿posture = robot.flangePos(ec)print("当前法兰位姿:", posture)# 获取基坐标系-----原model()类base = robot.baseFrame(ec)print("当前基坐标系:", base)# 获取当前的工具坐标系toolset = robot.toolset(ec)print("当前的工具坐标系为:", toolset)# 设置新的坐标系# coor_new = {'end': {'rot': [0, 0, 0], 'trans': [0.0, 0.0, -0.01]}, 'load': {'cog': [0.0, 0.0, 0.0],# 'inertia': [0.0, 0.0, 0.0], 'mass': 0.0},# 'ref': {'rot': [0.0, -0.0, 0.0], 'trans': [0.0, 0.0, 0.0]}}# robot.setToolset(coor_new, ec)# 获取当前的工具坐标系# toolset = robot.toolset(ec)# print("修改后的工具坐标系为:", toolset)# 获取法兰位姿posture_ = robot.flangePos(ec)print("修改坐标系后的法兰位姿:", posture_)# zero = zeroToolset()# robot.setToolset(zero, ec)############################################## 4. 计算正解和逆解 ###################################################### 计算正解->输入一个与当前机型轴数相同的List,返回一个当前位姿的listpoint = [10, 20, 30, 40, 50, 10]point = degree2rad(point)print(point)fk = robot.calcFK(point, ec)print("计算正解为:", fk)# 计算逆解->输入一个位姿,返回一个轴角的list# pos = [0.5930779237738772, -0.060094684364914094, 0.4260427869095114, 3.110893947990362, 0.04429035357891989, -2.9729572573550245]# ik = robot.calcIK(pos, ec)# # ik = rad2degree(ik)# print("计算逆解为:", ik)############################################## 5. 查询DO和DI ######################################################### 查询端口1_0的DO值do = robot.getDO(1, 0, ec)print(message(ec))print("DO1_0当前的信号值为:", do)# 查询端口1_0的DI值di = robot.getDI(0, 0, ec)print("DI1_0当前的信号值为:", di)# 将DO1_0的值设为falserobot.setDO(0, 0, False, ec)# 查询端口1_0的DO值do = robot.getDO(0, 0, ec)print("DO0_0修改后信号值为:", do)robot.setDO(0, 0, True, ec)############################################## 6. 断开连接再重连 ###################################################### 机器人断开连接robot.disconnectFromRobot(ec)time.sleep(2)# 机器人再次连接robot.connectToRobot(ec)############################################## 7. 打开和关闭拖动 ####################################################### # 机器人下电,因机器人拖动模式自动上电# robot.setPowerState(False, ec)# # 将机器人操作模式设为手动# robot.setOperateMode(rokae.OperateMode.manual, ec)# # 开启拖动# robot.enableDrag(rokae.DragParameter.Space.cartesianSpace.value, rokae.DragParameter.Type.freely.value, ec)# print("机器人状态:", robot.operationState(ec))# time.sleep(2)# # 关闭拖动# robot.disableDrag(ec)# print("机器人状态:", robot.operationState(ec))# print("非Drag模式下的上下电模式为:", robot.powerState(ec))# time.sleep(2)############################################## 8. 查询工件/工具信息 #################################################### 查询所有工具的信息# tool = robot.toolsInfo(ec)# print(tool)# for name in tool.keys():# print(name, "质量:", tool[str(name)]["load"]["mass"])# # 查询所有工件的信息# wobj = robot.wobjsInfo(ec)# print("查询工件名信息为:")# for name in wobj.keys():# print(name)############################################### 9. 运动指令 ########################################################robot.setOperateMode(rokae.OperateMode.automatic, ec)robot.setPowerState(True, ec)robot.moveReset(ec)# robot.setDefaultZone(100, ec)# robot.setDefaultSpeed(100, ec)# p0 = robot.flangePos(ec)# print(p0)# ############################################### 10. Move L 点位测试/ NB4 运动指令 ######################################################### 这里博主均改为使用 MoveAbsJCommand命令,数值使用弧度描述. BingLee 2025.5.28p1 = MoveAbsJCommand([0, -pi/4, 0, 0, pi/2, pi],1000, 0)# p1.offset = [0.1, 0, 0, 0, 0, 0]p2 = MoveAbsJCommand([pi/2, 0, pi/4, 0, 0, 0],1000, 0)# p2.offset = [0, 0, 0.01, 0, 0, 0]p3 = MoveAbsJCommand([-pi/2, -pi/4, 0, 0, pi/2, pi],1000, 0)p4 = MoveAbsJCommand([0, -pi/4, pi/4, 0, 0, 0],1000, 0)# p1.offset = [0.1, 0, 0, 0, 0, 0]p5 = MoveAbsJCommand([0, 0, 0, 0, pi/2, 0],500, 0)while True:cmd = input("please input"" 'm(start move)', 'p(pause)', 'c(continue)', 'q(break)', 'i(check)', 's(stop)','a(adjust)',""'r(reset)', d(drag), k(stop_drag) ")if cmd == 'm':print("start move")robot.executeCommand([p1, p2, p3, p4, p5], ec)robot.moveStart(ec)print(ec)elif cmd == 'p':print("suspend")robot.pause(ec)elif cmd == 'd':print("drag")robot.setOperateMode(rokae.OperateMode.manual, ec)robot.enableDrag(rokae.DragParameter.Space.jointSpace.value, rokae.DragParameter.Type.freely.value, ec)elif cmd == 'k':print("kill drag")robot.disableDrag(ec)elif cmd == 'c':print("continue move")robot.moveStart(ec)elif cmd == 'a':print("adjust speed percentage 0.5")robot.adjustSpeedOnline(0.1, ec)elif cmd == 'i':print("current pos id:", robot.getPointPos(ec))elif cmd == 'r':robot.moveReset(ec)elif cmd == 's':robot.stop(ec)else:print("stop")breakrobot.stop(ec)time.sleep(1)robot.setPowerState(False, ec)robot.disconnectFromRobot(ec)#
if __name__ == '__main__':main()
运行输出结果:
$ python3 firstexample.py
当前上下电状态为: 0
当前上下电状态为: 1
机器人轴数: 6 机型: XB10s-R1206-3B 控制器版本: 2.3.2
SDK版本: 0.1.7(Beta)
当前上下电状态为: 1
当前机器人的操作模式为: 0
当前机器人的运行状态为: 0
当前关节位置: [-1.1489009000176548e-05, 1.4887235907275245e-06, 1.6342124870940784e-05, 3.834951969714103e-06, 1.5708015998538547, -5.086011055912068e-05]
当前关节速度: [0.00010657046279474108, -0.0, 0.000355366933557185, 0.0, -0.0, -0.0]
当前关节力矩: [0.0, -0.0, 0.0, 0.0, -0.0, -0.0]
当前法兰位姿: [0.6140099673622327, -6.736065028031115e-06, 0.9639800086642404, 3.1415888174476487, -2.3400841886472892e-05, -3.141553282467999]
当前基坐标系: [0.0, 0.0, 0.0, 0.0, -0.0, 0.0]
当前的工具坐标系为: {'end': {'name': '', 'rot': [0.0, -0.0, 0.0], 'trans': [0.0, 0.0, 0.0]}, 'load': {'cog': [0.0, 0.0, 0.0], 'inertia': [0.0, 0.0, 0.0], 'mass': 0.0}, 'ref': {'name': '', 'rot': [0.0, -0.0, 0.0], 'trans': [0.0, 0.0, 0.0]}}
修改坐标系后的法兰位姿: [0.6140099530347417, -6.7360648634224415e-06, 0.9639798350653594, 3.141588817432537, -2.369797142919661e-05, -3.1415532824679984]
[0.17453292222222222, 0.34906584444444444, 0.5235987666666666, 0.6981316888888889, 0.8726646111111112, 0.17453292222222222]
计算正解为: [0.6142222356255438, 0.14980394927718851, 0.47920904205188103, 2.749132677334611, -0.3447416415079533, 2.705140663241381]
操作成功完成
DO1_0当前的信号值为: False
DI1_0当前的信号值为: None
DO0_0修改后信号值为: None
please input 'm(start move)', 'p(pause)', 'c(continue)', 'q(break)', 'i(check)', 's(stop)','a(adjust)','r(reset)', d(drag), k(stop_drag) - m
输入下述指令控制:
- m:启动运动轨迹
- p:暂停
- c:继续
- q:中断程序
- i:输出当前位置信息
- r:清理robot运动点寄存
- s:停止
这里博主常用的是m、p、c、q、i指令。
实际运行情况

参考
中间还涉及官方的其它库,也一并附上345。
RokaeRobot/xCoreSDK-Python: Software development Python interfaces for Rokae robots all series ↩︎
anaconda、miniconda、conda的关系及miniconda安装-CSDN博客 ↩︎
RokaeRobot/xCoreSDK-CPP: Software development C++ interfaces for Rokae robots all series, compatible with Linux and Windows. ↩︎
RokaeRobot/xCoreSDK-CSharp: Software development C# interfaces for Rokae robots all series ↩︎
RokaeRobot/xCoreSDK-Android: Software development interfaces for Rokae robots all series, supports Android platform ↩︎
相关文章:
【ROS2实体机械臂驱动】rokae xCoreSDK Python测试使用
【ROS2实体机械臂驱动】rokae xCoreSDK Python测试使用 文章目录 前言正文配置环境下载源码配置环境变量测试运行修改点说明实际运行情况 参考 前言 本文用来记录 xCoreSDK-Python的调用使用1。 正文 配置环境 配置开发环境,这里使用conda做python环境管理&…...

c/c++的opencv椒盐噪声
在 C/C 中实现椒盐噪声 椒盐噪声(Salt-and-Pepper Noise),也称为脉冲噪声(Impulse Noise),是数字图像中常见的一种噪声类型。它的特点是在图像中随机出现纯白色(盐)或纯黑色&#x…...

C++ TCP程序增加TLS加密认证
TCP为什么要增加TLS TCP程序添加TLS主要是为了解决TCP协议本身的安全缺陷。TCP作为传输层协议,虽然提供了可靠的数据传输,但它是明文传输,存在几个关键的安全问题: 数据泄露风险:TCP传输的数据完全暴露在网络中,任何能够监听网络流量的人都可以直接读取传输内容。这对于…...

构建一个“论文检索 + 推理”知识库服务,支持用户上传 PDF/LATEX 源码后,秒级检索并获得基于内容的问答、摘要、引用等功能
文章目录 1 总体目标 / Overall Goal2 数据管线 / Data Pipeline3 检索策略 / Retrieval Strategy4 服务切分 / Service Decomposition5 Agent & Prompt 设计 / Agent & Prompt6 核心功能 / Core Features7 评测与监控 / Evaluation & Monitoring8 面试亮点 / Inte…...
VLC-QT 网页播放RTSP
先看效果图,代码在文章末尾,包含源码,vlc-qt完整的库 环境说明:VS 2017 QTQt5.13.0 MSVC2017 32位 将vlc_install 目录下的bin,include,lib里所有的东西分别放在qt目录下 bin -> C:\Qt\Qt5.13.0\5.13.0\msvc2017\bin include->C:\Qt\Qt5.13.0\5.13.0\msvc201…...
和for(auto a:b)的区别)
for(auto a:b)和for(auto a:b)的区别
#include<iostream> using namespace std; int main() {string s( "hello world" );for (auto c:s)c t ;cout<<s<<endl; //结果为hello worldfor (auto &c:s)c t ;cout<<s<<endl; //结果为ttttttttttt }for(auto a:b)中b为一…...
)
第2章-12 输出三角形面积和周长(走弯路解法)
本题要求编写程序,根据输入的三角形的三条边a、b、c,计算并输出面积和周长。注意:在一个三角形中, 任意两边之和大于第三边。三角形面积计算公式:areas(s−a)(s−b)(s−c),其中s(abc)/2。 import math de…...

Caddy如何在测试环境中使用IP地址配置HTTPS服务
前言 在开发和测试环境中,我们经常需要搭建HTTPS服务进行测试。但通常Let’s Encrypt等证书颁发机构要求使用有效域名,不直接支持IP地址。本文将详细介绍如何使用Caddy在测试环境中通过IP地址配置HTTPS服务,使用自签名证书解决这一问题。 环…...

shell中与>和<相关的数据流重定向操作符整理
shell中与>和<相关的数据流重定向操作符整理 输出重定向操作符>>>2>2>>&> 或 >&&>> 输入重定向操作符<<<<<< 组合重定向2>&1 文件描述符相关重定向[n]< file 和 [n]> file>&- 和 <&…...
【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix
【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix 文章目录 【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix一、资料准备1.去畸变影像2.相机文件3.外方位元素二、创建工程1.新建工程2.导入照片3.编辑相机文件4.编辑外方位元素文件,导入外方位元…...
创建型设计模式之Prototype(原型)
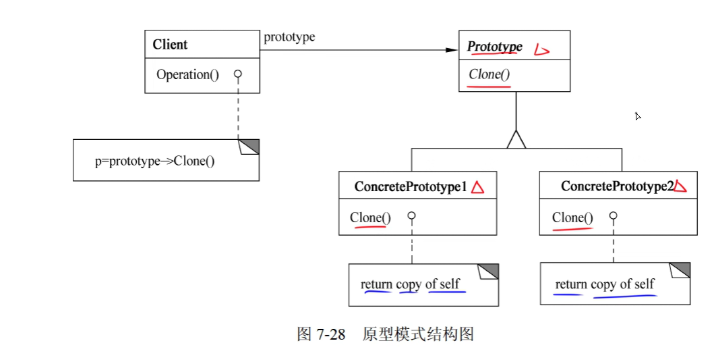
创建型设计模式之Prototype(原型) 摘要: Prototype(原型)设计模式通过复制现有对象来创建新对象,避免重复初始化操作。该模式包含Prototype接口声明克隆方法、ConcretePrototype实现具体克隆逻辑ÿ…...
JNI开发流程
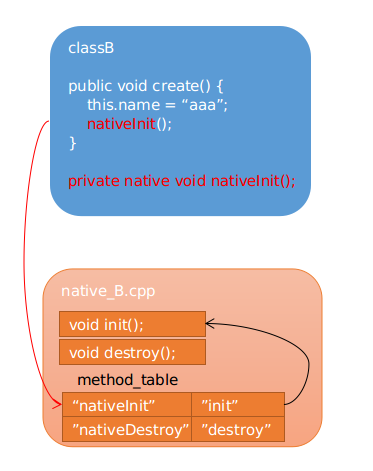
一. 引言 最近在做一个自己的项目,就是基于FastDDS封装一套JAVA库,让android和java应用可以使用dds的功能。 由于FastDDS是使用C编写的开源库,因此java的类库想要调用FastDDS的接口,需要额外编写一个JNI层的动态库对FastDDS的接口…...
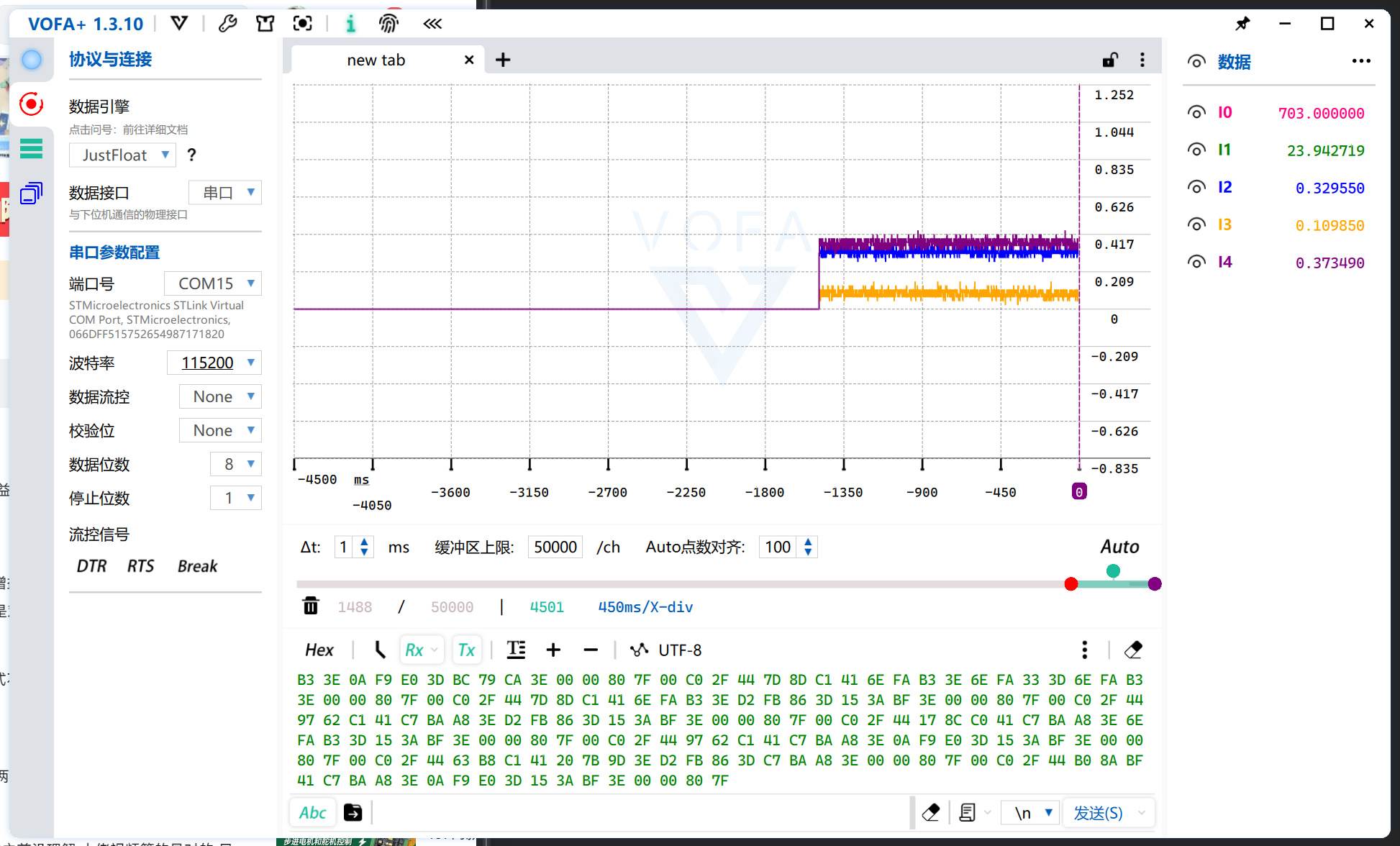
STM32G4 电机外设篇(二) VOFA + ADC + OPAMP
目录 一、STM32G4 电机外设篇(二) VOFA ADC OPAMP1 VOFA1.1 VOFA上位机显示波形 2 ADC2.1 用ADC规则组对板载电压和电位器进行采样 3 OPAMP(运放)3.1 结合STM32内部运放和ADC来完成对三相电流的采样3.2 运放电路分析 附学习参考…...
和重排序(rerank))
RAG应用:交叉编码器(cross-encoder)和重排序(rerank)
文章目录 Sentence Transformers交叉编码器交叉编码器使用示例检索和重排序Sentence Transformers Sentence Transformers 支持两种类型的模型: Bi-encoders 和 Cross-encoders。Bi-encoders 更快更可扩展,但 Cross-encoders 更准确。虽然两者都处理类似的高水平任务,但何时…...

微服务难题?Nacos服务发现来救场
文章目录 前言1.什么是服务发现2.Nacos 闪亮登场2.1 服务注册2.2 服务发现 3.Nacos 的优势3.1 简单易用3.2 高可用3.3 动态配置 4.实战演练4.1安装 Nacos4.2 服务注册与发现示例代码(以 Spring Boot 为例) 总结 前言 大家好,我是沛哥儿。今天…...
C# 结合PaddleOCRSharp搭建Http网络服务
Windows打开端口: 控制面板 > 系统和安全 > 防火墙> 高级设置 → 入站规则 → 右侧选择 → 新建规则 → 端口 → 协议类型 TCP→ 端口 using System; using System.Drawing; using System.IO; using System.Net; using System.Text; using System.Threadi…...
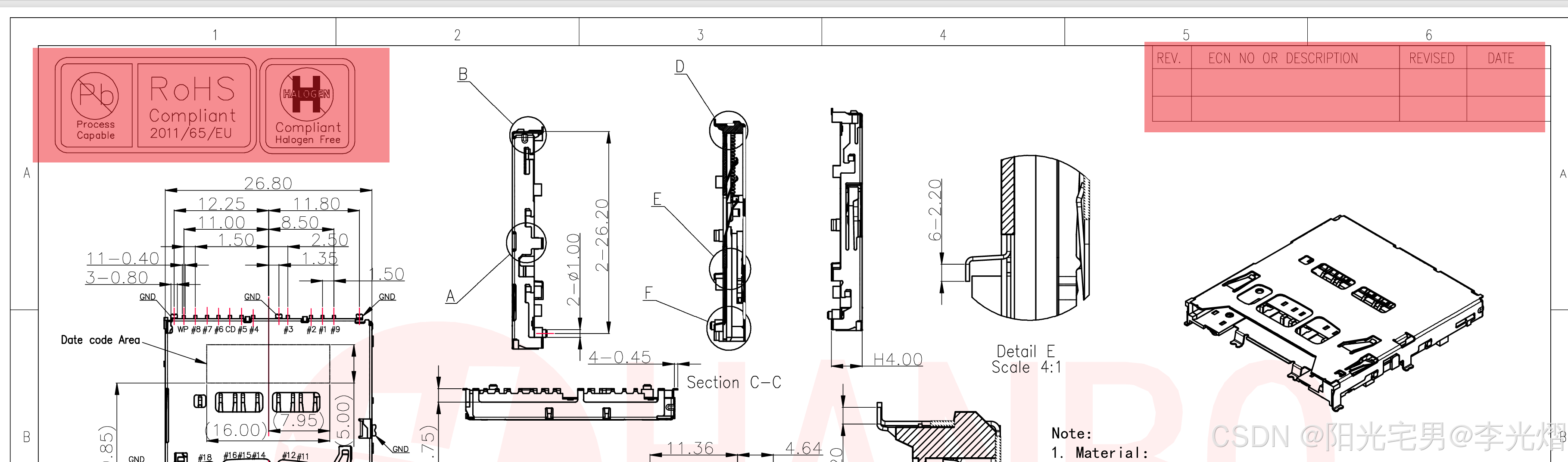
【连接器专题】SD卡座规格书审查需要审哪些方面?
在审查SD卡座规格书时,我们需要考虑哪些方面? 首先在拿到一份SD卡座的详细规格书时,一般供应商给到的规格书中包括了一些基础信息、产品图纸信息、技术参数信息,同时有些供应商会给出产品可靠性测试报告。因此我们会从这几个要素去看规格书。 基础信息 基础信息一般会给变更…...

JS手写代码篇---手写节流函数
8、节流函数 什么是节流函数? 指规定一个单位时间,在这个单位时间内,只能有一次触发事件的回调函数执行,如果在同一个单位时间内某事件被触发多次,只有一次能生效。 与防抖函数有什么区别? 防抖函数是延…...

UE5 C++动态调用函数方法、按键输入绑定 ,地址前加修饰符
UE5 C动态调用函数方法、按键输入绑定 ,地址前加修饰符&,这个符号忘记输入的话,编译一直报错不通过 void ASnakeHead::SetupPlayerInputComponent(UInputComponent* PlayerInputComponent) { Super::SetupPlayerInputComponent(PlayerIn…...

eBest智能价格引擎系统 助力屈臣氏饮料落地「价格大脑」+「智慧通路」数字基建
从价格策略到终端执行,数字化正在重构饮料行业竞争壁垒! 近日,eBest为屈臣氏饮料提供的智能价格引擎系统已正式上线并投入运营。同时,基于eBest SFA方案且与屈臣氏饮料业务场景深度耦合的Smart Field Operation智慧通路项目正式启…...

ubuntu mysql 8.0.42 基于二进制日志文件位置和GTID主从复制配置
目录 1 操作系统信息 2 MySql数据库版本 3 主机列表 4 MySQL服务器都安装依赖 5 主库服务器安装mysql软件步骤: 6 从服务器安装mysql软件步骤 7 基于二进制日志文件位置的主从复制配置 8 使用全局事务标识符进行主从复制(GTID) 9 部署过程遇到问题 1 操作系…...
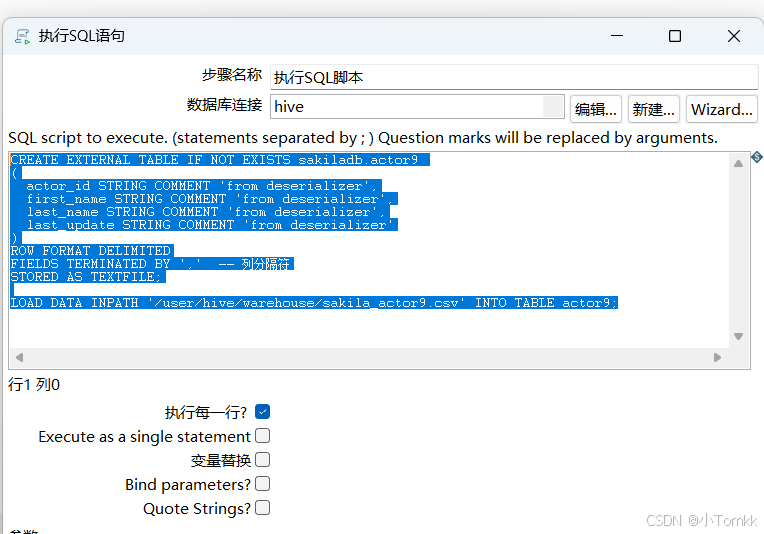
Kettle 远程mysql 表导入到 hadoop hive
kettle 远程mysql 表导入到 hadoop hive (教学用 ) 文章目录 kettle 远程mysql 表导入到 hadoop hive创建 对象 执行 SQL 语句 -mysql 导出 CSV格式CSV 文件远程上传到 HDFS运行 SSH 命令远程登录 run SSH 并执行 hadoop fs -put 建表和加载数据总结 创…...
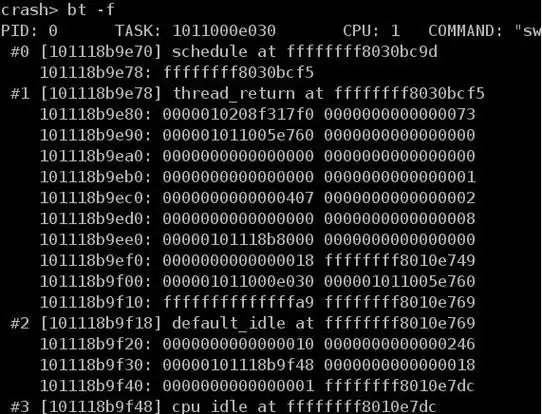
完整解析 Linux Kdump Crash Kernel 工作原理和实操步骤
完整解析 Linux Kdump Crash Kernel 工作原理和实操步骤 一、前言 在使用 Linux 操作系统进行内核开发或者系统维护时,内核 panic 是最常见的系统崩溃环节。如果想要在内核崩溃后立即分析环境和输出内核内存 dump,Kdump crashkernel 是最接近完美的解…...

菜鸟之路Day36一一Web开发综合案例(部门管理)
菜鸟之路Day36一一Web开发综合案例(部门管理) 作者:blue 时间:2025.5.28 文章目录 菜鸟之路Day36一一Web开发综合案例(部门管理)一.环境搭建二.开发规范三.部门管理3.1查询3.2删除3.3新增3.3修改根据id来…...

LangChain实战:MMR和相似性搜索技术应用
导读:在当今大数据和人工智能快速发展的背景下,向量数据库的搜索技术正成为技术人员必须掌握的核心技能。本文将深入探讨LangChain框架与Milvus向量数据库的整合实践,重点对比分析相似度搜索与最大边际相关性(MMR)搜索…...
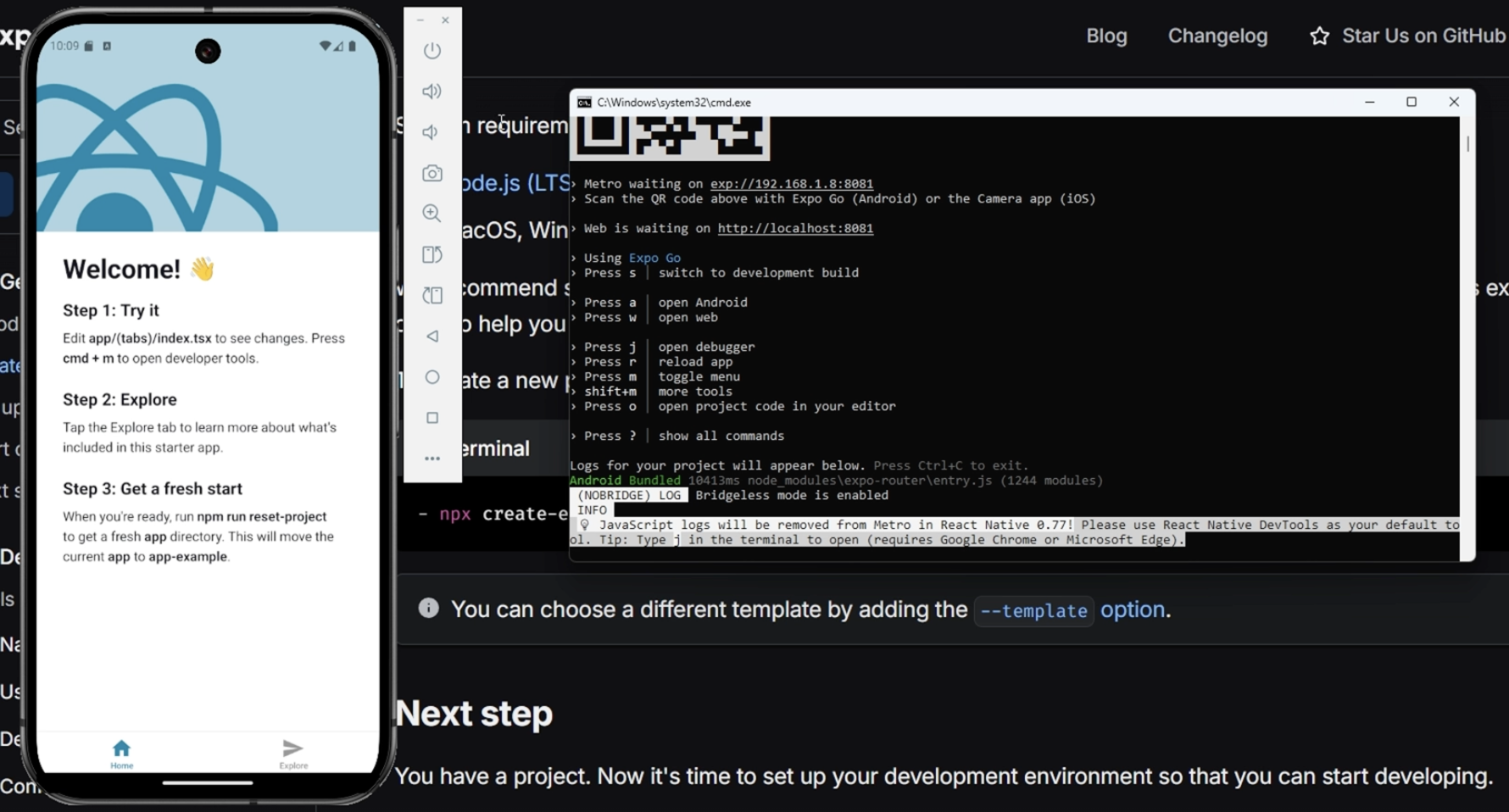
第 1 章:学习起步
1. React Native前置知识要求 在开始学习React Native之前,有一些前置知识你需要了解。不过别担心,我会带你逐步掌握这些内容,让你顺利入门。 1.1. JavaScript是必须掌握的 学习React Native,JavaScript是基础。你需要了解Java…...
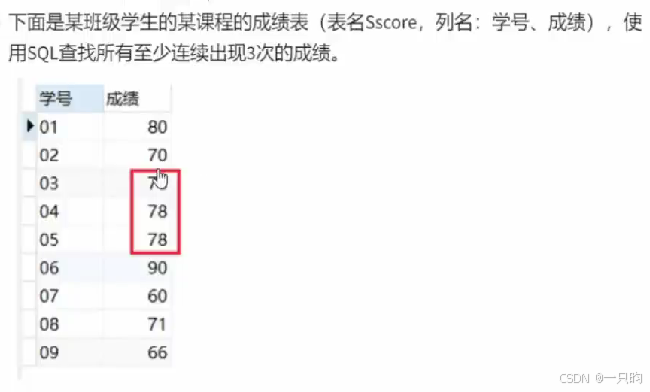
SQL查询——大厂面试真题
前言 本文总结了SQLite数据库的核心操作要点:1. 基础语法:SQL语句不区分大小写,多语句需用分号分隔,支持多种注释方式2. 表操作:包括创建表(定义主键、非空约束等)、插入/更新/删除数据、添加/…...
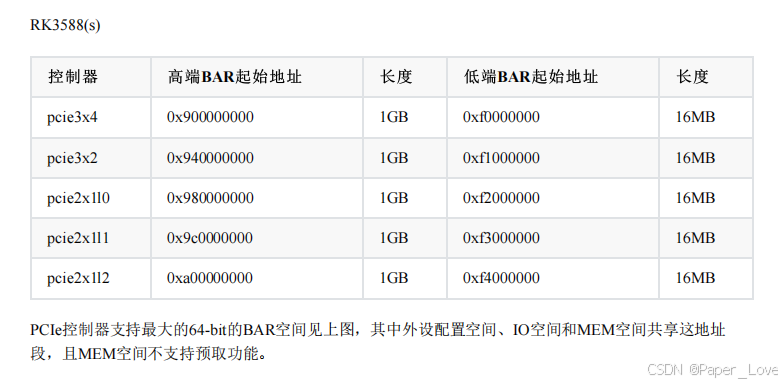
Linux-pcie ranges介绍
参考链接:https://elinux.org/Device_Tree_Usage#PCI_Host_Bridge pcie bar高低端BAR起始地址介绍 pcie设备树节点 / {compatible "rockchip,rk3588";interrupt-parent <&gic>;#address-cells <2>;#size-cells <2>;pcie3x4: p…...
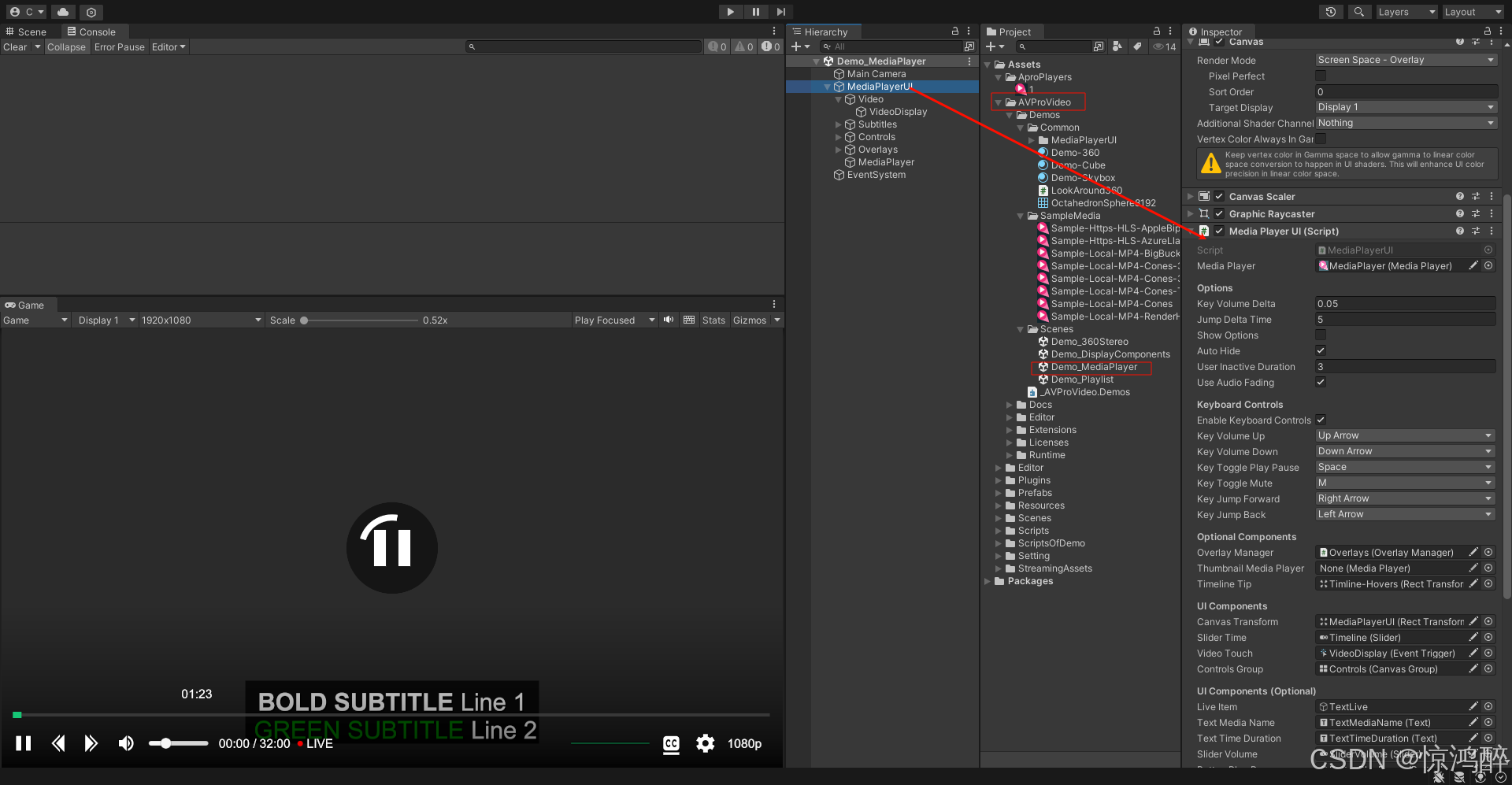
⭐ Unity AVProVideo插件自带播放器 脚本重构 实现视频激活重置功能
一、功能概述 本笔记记录直接修改插件自带的场景播放其中 原始的 MediaPlayerUI 脚本,实现激活时自动重置播放器的功能。 我用的插件版本是 AVPro Video - Ultra Edition 2.7.3 修改后的脚本将具备以下特性: 激活 GameObject 时自动重置播放位置到开头 可配置是否在重置后自…...

互联网大厂Java求职面试:云原生微服务架构设计与AI大模型集成实战
互联网大厂Java求职面试:云原生微服务架构设计与AI大模型集成实战 面试场景设定 人物设定: 李明(技术总监):拥有15年分布式系统架构经验,主导过多个亿级用户系统的重构,对云原生和AI融合有深…...