目标检测预测框置信度(Confidence Score)计算方式
预测框的置信度(Confidence Score)是目标检测模型输出的一个关键部分,它衡量了模型对一个预测框中包含特定类别对象的确定程度。
不同的目标检测模型(如Faster R-CNN、SSD、YOLO、DETR等)在计算置信度时有其特有的机制,但核心思想都是将对象存在性和类别概率结合起来。
常见的置信度计算方式
以下是几种主流目标检测模型中置信度的计算方式:
1. 基于分类和目标性评分(如Faster R-CNN, SSD, RetinaNet)
这类模型通常会为每个预测框(或预定义的锚框/先验框)输出两部分信息:
- 目标性评分 (Objectness Score / Objectness Probability):表示该预测框中存在一个对象的可能性。这通常是一个二分类问题(前景 vs 背景),通过一个sigmoid激活函数输出0到1之间的值。
- 类别概率 (Class Probabilities):表示该预测框中对象属于各个类别的概率分布。这通常通过一个softmax激活函数输出,所有类别的概率和为1。
置信度计算公式:
对于某个预测框,其最终的置信度通常是:
Confidence Score=Objectness Score×Max Class Probability
例子:
假设一个预测框:
- 目标性评分:0.95 (模型认为这个框里有东西的概率是95%)
- 类别概率:
- 人 (Person): 0.8
- 车 (Car): 0.1
- 狗 (Dog): 0.05
- 背景 (Background): 0.05 (如果模型也预测背景类)
那么,这个预测框的最终置信度会是:
Confidence Score=0.95×0.8=0.76
这个0.76就是该预测框是“人”且“确实是一个对象”的置信度。当我们在NMS后设置阈值(例如0.5)时,就是用这个0.76与0.5进行比较。
具体模型中的体现:
- Faster R-CNN:
- RPN (Region Proposal Network) 会预测每个锚框的objectness score (是否是前景)。
- Fast R-CNN Head 会对每个RoI(Region of Interest)进行分类,输出class probabilities。
- 最终的置信度结合了RPN的objectness和Fast R-CNN Head的分类概率。
- SSD (Single Shot MultiBox Detector):
- SSD为每个预设的default box(类似锚框)在不同特征图层上同时预测class probabilities和bounding box offsets。
- 在SSD中,通常会有一个背景类,因此class probabilities本身就包含了是否是目标的含义。模型会为每个default box预测num_classes + 1 (包括背景) 的概率。
- 置信度就是某个非背景类别的最高概率。例如,如果模型预测一个框是“猫”的概率是0.7,背景是0.3,那么这个框的置信度就是0.7。
- RetinaNet:
- RetinaNet使用Focal Loss来解决前景背景类别不平衡问题。
- 它为每个锚框预测objectness score (通过二分类) 和class probabilities (通过多分类)。
- 置信度计算方式类似Faster R-CNN,是objectness score乘以max class probability。
2. 直接预测置信度(如YOLO系列 - 早期版本)
早期的YOLO(如YOLOv1)模型会直接预测每个网格单元(grid cell)是否包含一个对象以及该对象的类别。
- YOLOv1: 每个网格单元预测一个 confidence score (C),表示该网格包含对象的置信度以及预测框的准确性(IoU)。同时预测 conditional class probabilities (
)。
- 最终的类别特异性置信度 (Conditional Class Probability with Confidence) 是:
- 这里的 Confidence 本身就包含了IoU的含义,即
。
- YOLOv2/v3/v4: 这些版本中,confidence score 通常指的是目标性分数 (Objectness Score),即预测框中存在一个对象的概率。
- 模型为每个锚框预测一个objectness score (通过sigmoid激活函数)。
- 同时预测class probabilities (通过softmax或多个独立的sigmoid)。
- 最终的置信度仍然是objectness score乘以max class probability。
- YOLOv5/v8(及更新版本):
- 这些现代YOLO版本通常输出num_classes + 5个值:4个边界框坐标,1个目标性分数 (objectness),以及num_classes个类别分数。
- 最终的置信度计算方式与上面类似,即objectness score与max class probability的乘积。
3. 基于Transformer的直接预测(如DETR)
DETR (DEtection TRansformer) 模型的置信度计算方式与传统基于锚框的方法有所不同,因为它直接输出一个固定数量的检测结果集,并且通过二分图匹配来处理重复检测。
- DETR的输出: 对于每个对象查询(Object Query),DETR的解码器头会直接预测:
- 类别概率 (Class Probabilities):包括一个特殊的“无对象”(no object)类别 ∅。这通过Softmax输出,所有类别的概率和为1。
- 边界框坐标。
- 置信度计算: 对于一个预测框,其置信度就是该预测框属于某个非 ∅ 类别的最高概率。
- 如果某个预测框的最高类别概率是 ∅ 类别,那么它的置信度就被认为是0(或低于某个极低阈值,从而被丢弃)。
- 如果最高类别概率是非 ∅ 的某个物体类别(例如“人”),那么这个概率就是该预测框的置信度。
DETR中的“无对象”类别 ∅ 和二分图匹配是其处理置信度和假阳性的关键:
- 在训练时,DETR通过匈牙利算法进行二分图匹配,将每个预测框与一个真实目标(或 ∅ )唯一匹配。这使得模型直接学习到如何抑制冗余预测,而不是依赖NMS。
- 在推理时,如果模型预测某个查询的类别概率中 ∅ 的概率最高,就表示该查询没有检测到任何对象,这个预测会被忽略,从而自然地减少了假阳性。
总结
尽管不同模型有细节差异,但预测框置信度的核心思想是衡量一个边界框中确实存在一个特定类别对象的概率。这个概率通常是通过将对象存在性的评估和类别分类的评估相结合而得到的。在实际应用中,我们会根据这个置信度来过滤预测结果,并通过调整置信度阈值来平衡模型的精度和召回率。
相关文章:
目标检测预测框置信度(Confidence Score)计算方式
预测框的置信度(Confidence Score)是目标检测模型输出的一个关键部分,它衡量了模型对一个预测框中包含特定类别对象的确定程度。 不同的目标检测模型(如Faster R-CNN、SSD、YOLO、DETR等)在计算置信度时有其特有的机制…...
【题解-洛谷】B4295 [蓝桥杯青少年组国赛 2022] 报数游戏
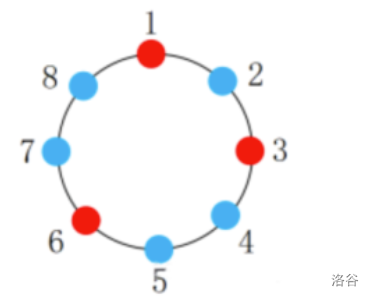
题目:B4295 [蓝桥杯青少年组国赛 2022] 报数游戏 题目描述 某班级男生人数为 X X X 人,女生人数为 Y Y Y 人,现全班同学围成一个圆圈,并按照顺时针方向为每名同学编号(从 1 1 1 到 X Y XY XY)。现给…...

Bootstrap项目 - 个人作品与成就展示网站
文章目录 前言一、项目整体概述1. 项目功能介绍1.1 导航栏1.2 首页模块1.3 关于我模块1.4 技能模块1.5 作品模块1.6 成就模块1.7 博客模块1.8 联系我模块 2. 技术选型说明 二、项目成果展示1. PC端展示1.1 首页1.2 关于我1.3 技能1.4 作品1.5 成就1.6 博客1.7 联系我 2. 移动端…...

新能源汽车霍尔线束介绍
新能源汽车作为传统燃油车的重要替代方案,其核心驱动系统依赖于高效、精准的电子控制技术。在这一体系中,霍尔线束作为关键传感器组件,承担着电机转速、位置信号的实时采集与传输任务,其性能直接影响整车动力输出的稳定性和能量利…...

2023网络应用专业-Python程序设计复习题目
2023技校网络应用专业-Python程序设计复习题目 须知: 个人信息要填写正确,在线答题时间不限,可以反复作答,次数不限,最后取最高分。 第一部分:单选题 1. 在Python交互模式下,输入下面代码: >>> “{0:.2f}”.format(12345.6789) 回车后显示的结果为: [单选…...

Termux可用中间人网络测试工具Xerosploit
Termux可用中间人网络测试工具Xerosploit。 Xerosploit 是一款基于 MITM 的本地网络渗透测试工具包。 食用方法: git clone https://github.com/LionSec/xerosploit cd xerosploit sudo python3 install.py 运行: sudo xerosploit 使用备注࿱…...

气镇阀是什么?
01、阀门介绍: 油封机械真空泵的压缩室上开一小孔,并装上调节阀,当打开阀并调节入气量,转子转到某一位置,空气就通过此孔掺入压缩室以降低压缩比,从而使大部分蒸汽不致凝结而和掺入的气体一起被排除泵外起此…...
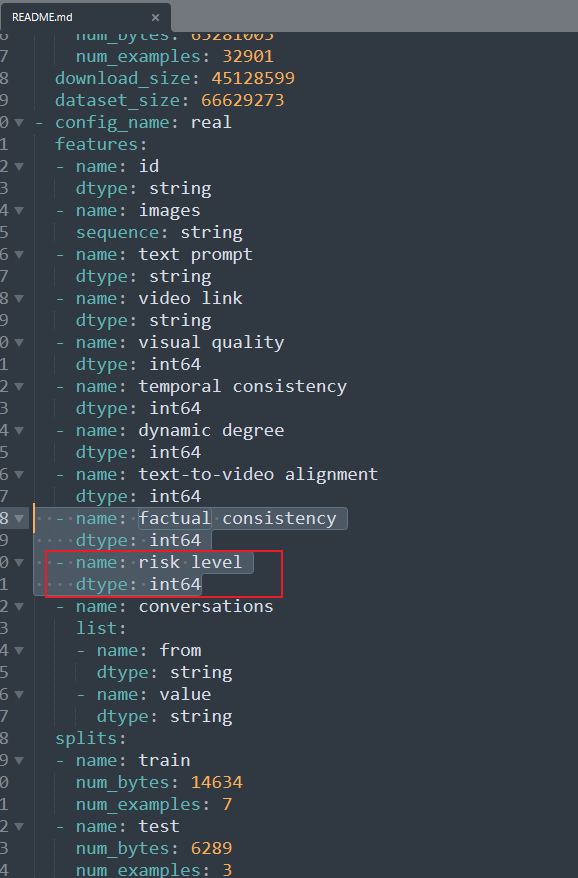
SmolVLM2: The Smollest Video Model Ever(七)
编写测试代码与评价指标 现在的数据集里面只涉及tool的分类和手术phase的分类,所以编写的评价指标还是那些通用的,但是: predicted_labels:[The current surgical phase is CalotTriangleDissection, Grasper, Hook tool exists., The curre…...
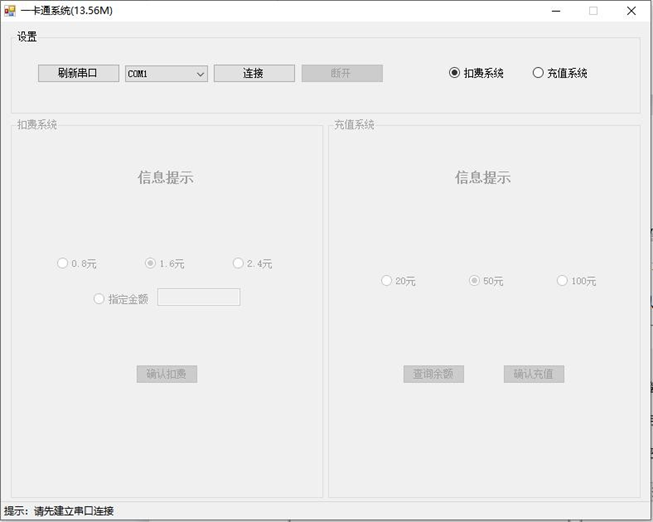
RFID综合项目实训 | 基于C#的一卡通管理系统
目录 基于C#的一卡通管理系统 【实验目的】 【实验设备】 【实验内容】 【实验步骤】 实验准备 第一部分 界面布局设计 第二部分 添加串口通讯函数及高频标签操作功能函数(部分代码) 第五部分 实验运行效果 基于C#的一卡通管理系统 【实验目的】 熟悉 …...

mysql如何设置update时间字段自动更新?
之前在给网站做表设计的时候时间字段都是用的datetime类型,初始值都是设置的CURRENT_TIMESTAMP。 由于给文章表设计的有创建时间和更新时间两个字段,但是更新时间字段需要在更新文章后再次更新,当时由于不了解mysql还可以设置自动更新时间戳…...

数据库备份与恢复专业指南
数据库备份与恢复专业指南 一、备份与恢复核心概念 关键结论:数据库备份是数据安全的最后防线,恢复能力才是真正的备份有效性检验标准。 AI大模型专栏:https://duoke360.com/tutorial/path/ai-lm 1.1 备份类型 物理备份:直接复制数据库文件(如MySQL的.ibd文件、Oracle的.d…...

【第4章 图像与视频】4.5 操作图像的像素
文章目录 前言示例-获取和修改图像数据图像数据的遍历方式图像滤镜负片滤镜黑白滤镜浮雕滤镜filter滤镜属性 前言 getImageData() 与 putImageData() 这两个方法分别用来获取图像的像素信息,以及向图像中插入像素。与此同时,如果有需要,也可…...
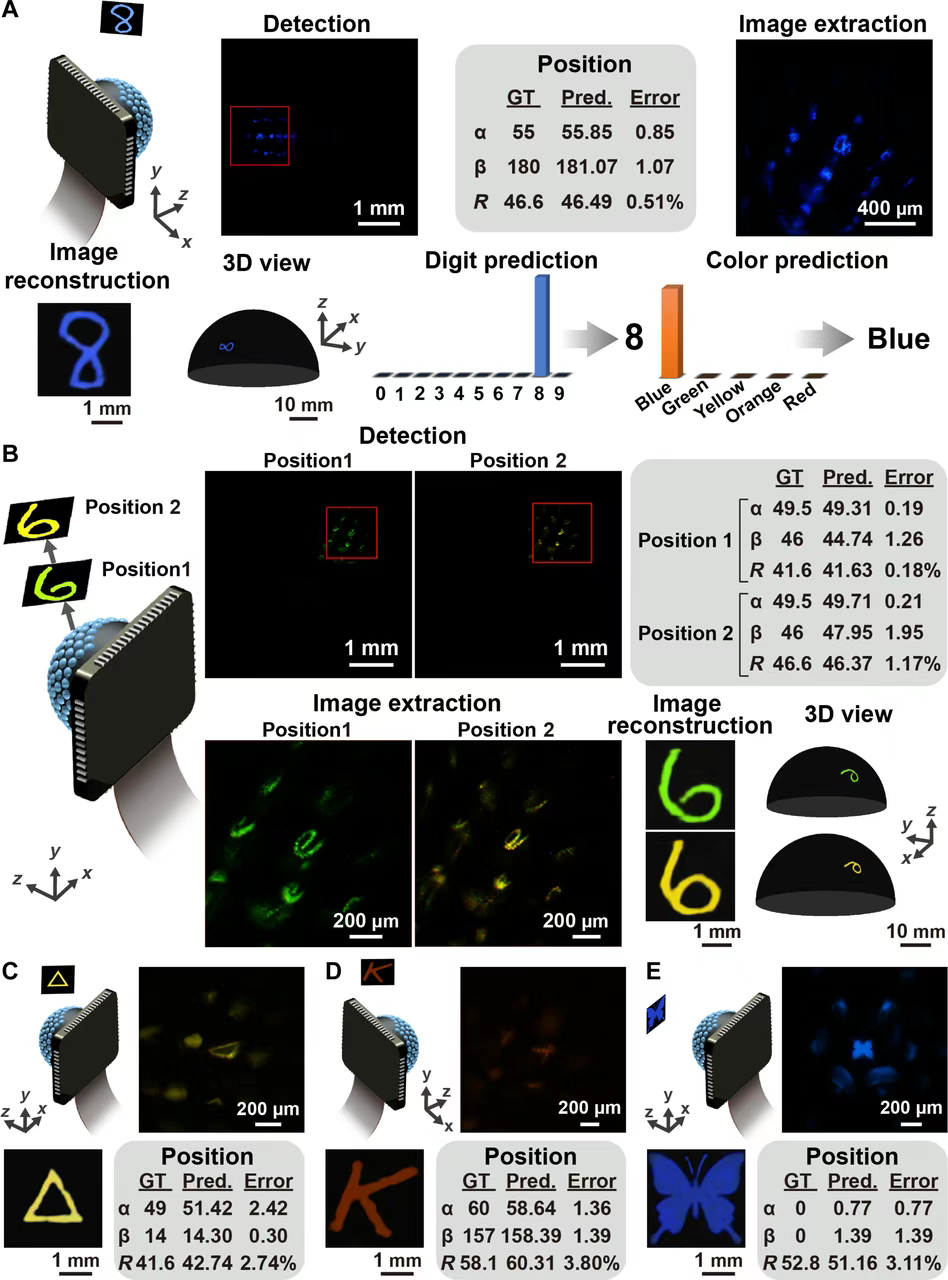
Science Advances 上海理工大学与美国杜克大学(Duke University)共同开发了一种仿生复眼相机
编辑丨%科学家开发了一种 AI 辅助的仿生复眼相机。炎炎夏日,相信各位读者都有被蚊子骚扰过的恼火记忆。但往往想要清剿蚊子的时候,却被它灵巧地躲开,再难找到。诸如蚊子这种节肢动物的视觉系统已经进化了 5 亿多年,从寒武纪一直到…...

正点原子Z20 ZYNQ 开发板发布!板载FMC LPC、LVDS LCD和WIFI蓝牙等接口,资料丰富!
正点原子Z20 ZYNQ 开发板发布!板载FMC LPC、LVDS LCD和WIFI&蓝牙等接口,资料丰富! 正点原子新品Z20 ZYNQ开发板来啦!核心板全工业级设计,主控芯片型号是XC7Z020CLG484-2I。开发板由核心板底板组成&…...
软件测评中心如何确保软件品质?需求分析与测试计划很关键
软件测评中心承担着对软件进行评估、测试和审查的任务,它有一套规范的流程来确保软件的品质,并且能够向客户和开发者提供详实的软件状况分析报告。 需求分析环节 这一环节至关重要,必须与客户和开发团队保持密切交流。我们需要从他们那里精…...
)
004 flutter基础 初始文件讲解(3)
之前,我们正向的学习了一些flutter的基础,如MaterialApp,Scaffold之类的东西,那么接下来,我们将正式接触原代码: import package:flutter/material.dart;void main() {runApp(const MyApp()); }class MyAp…...
2025LitCTF 复现
easy_file 登录界面 尝试admin 和密码1 没成功 结果尝试了弱口令 admin 用户和 password 密码就登录成功了 文件上传 新建一个空的 新建木马.txt 文件发现上传成功 然后写入一句话木马 <?php eval($_POST[a]); ?> 上传失败 说明可能是有字符被过滤了,猜…...

英语中最难学的部分是时态
英语中最难学的部分是时态。英语的时态体系包含16种时态,每种时态都有其独特的用法和规则,这使得时态成为英语学习中的一个难点 。 时态的定义和分类 时态可以分为时间和体态两个维度: 时间:现在时、过去时、将来时、过…...

Python 如何让自动驾驶的“眼睛”和“大脑”真正融合?——传感器数据融合的关键技术解析
Python 如何让自动驾驶的“眼睛”和“大脑”真正融合?——传感器数据融合的关键技术解析 自动驾驶技术从来都不是“单兵作战”。如果你细看一辆自动驾驶汽车,它其实是一个传感器的集合体:摄像头、激光雷达(LiDAR)、毫米波雷达、超声波传感器、GPS……这些传感器各自发挥作…...
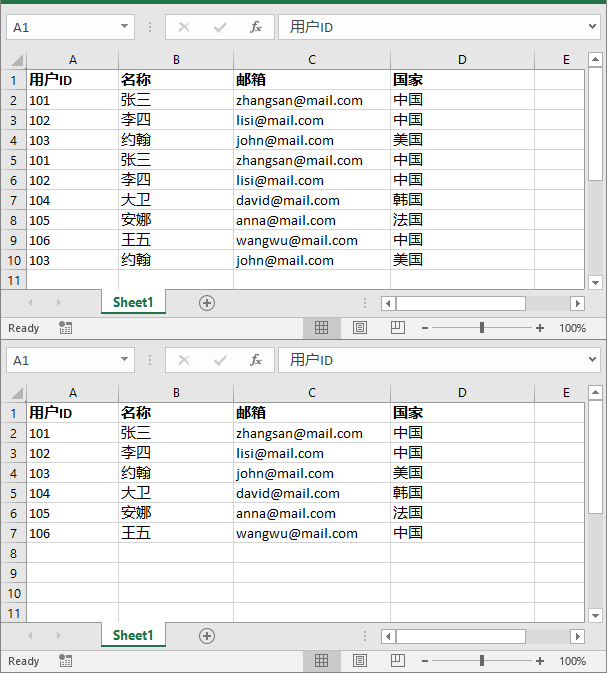
使用C# 快速删除Excel表格中的重复行数据-详解
目录 简介 使用工具 C# 删除Excel工作表中的重复行 C# 删除指定Excel单元格区域中的重复行 C# 基于特定列删除重复行 RemoveDuplicates 方法快速比较 简介 重复行是指在Excel表格中完全相同的多行数据。这些冗余行的存在可能源于多种原因,例如: …...
WPF-Prism学习笔记之 “导航功能和依赖注入“
新建空白模板(Prism) 新建好后会有自动创建ViewModels和Views 在"MainWindow.xaml"文件里面标题去绑定了一个属性"Title",而"MainWindowViewModel.cs"里面继承一个非常重要的"BindbleBase"(prism框架里面非常重要的)。所以…...
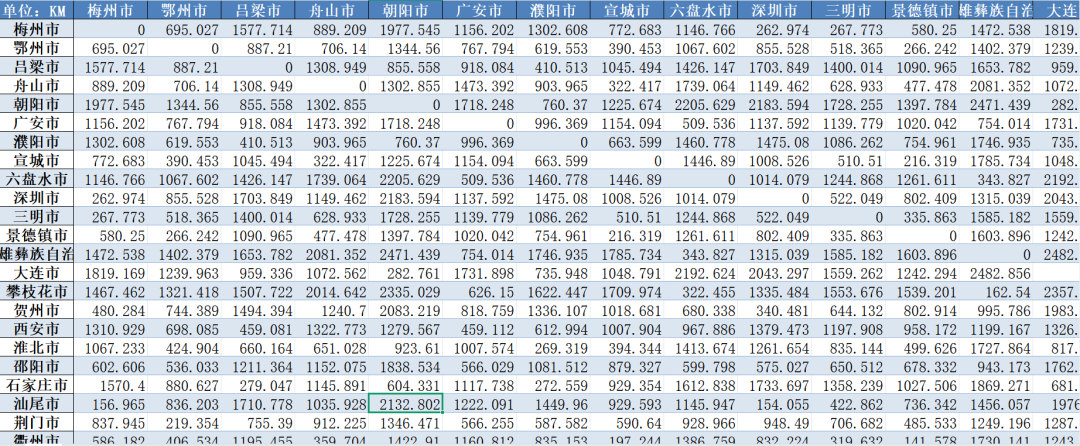
中国城市间地理距离矩阵(2024)
1825 中国城市间地理距离矩阵(2024) 数据简介 中国城市间地理距离矩阵数据集,通过审图号GS(2024)0650的中国城市地图在Albers投影坐标系中进行计算得出矩阵表格,单位为KM,方便大家研究使用。 中国城市地理距离矩阵数据通过计算城市中心距离…...

【孙悟空喝水】2022-2-7
缘由C编程问题求解:9634: 孙悟空喝水-编程语言-CSDN问答 void 孙悟空喝水() {//缘由https://ask.csdn.net/questions/7639865?spm1005.2025.3001.5141int x 2, n 0; double s 0, ss 0;std::cin >> n;while ((int)s < n)s 1.0 / x, ss (x - 1.0) / …...

`sysctl`命令深度剖析:如何优化内核参数以提升服务器网络/IO性能?
更多服务器知识,尽在hostol.com 嘿,各位Linux服务器的“老司机”和“赛车手”们!咱们把服务器比作一辆高性能跑车,日常跑起来是很快,但你有没有想过,这辆“跑车”出厂时的默认设置,可能只是为了…...

AxumStatusCode细化Rust Web标准格式响应
1. Axum 中的 StatusCode 概述 axum::http::StatusCode 提供了 HTTP 状态码的枚举,涵盖了从 100 到 599 的所有标准状态码。 通过使用这些状态码,您可以精确地控制 HTTP 响应的语义,例如成功、客户端错误、服务器错误等。 1.1 常用状态码 …...

【备战秋招】C++音视频开发经典面试题整理
1、简要介绍一下对 H.264 的了解? 1)基础描述 H.264 是由国际标准组织机构(ISO)下属的运动图象专家组(MPEG)和国际电传视讯联盟远程通信标准化组织(ITU-T)开发的系列编码标准之一。…...

【音频处理】java流式调用ffmpeg命令
今天发现一个ffmpeg的用法,用子进程直接从标准输入写入输入,就可以从标准流式输出获取转码结果。 这样的好处是不用去写ffmpeg的代码,只需要写对ffmpeg的命令、在输入输出的地方加缓存就能进行流式转码了,方便快捷。 但是也有坏处…...
《java创世手记》---java基础篇(下)
《Java 创世手记 - 基础篇(下)》 第五章:契约与规范 —— 接口 (Interfaces) 与抽象类 (Abstract Classes) 造物主,在你日益繁荣的世界里,你发现仅仅依靠“继承”来构建“物种体系”有时会遇到一些限制。比如&#x…...
【MySQL】C语言连接
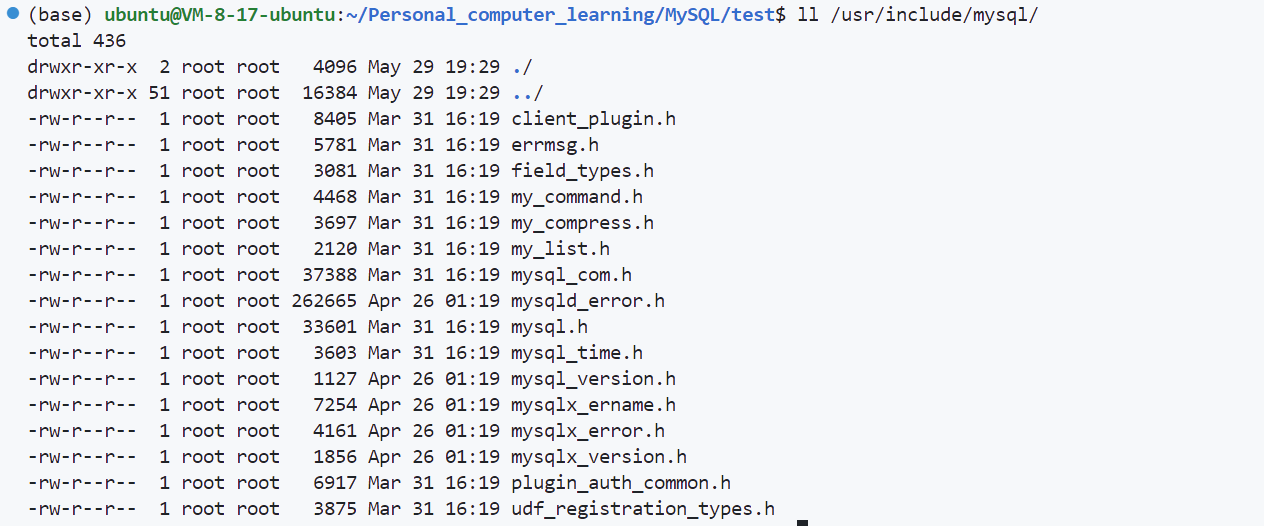
要使用C语言连接mysql,需要使用mysql官网提供的库,大家可以去官网下载 我们使用C接口库来进行连接 要正确使用,我们需要做一些准备工作: 保证mysql服务有效在官网上下载合适自己平台的mysql connect库,以备后用 下载开发库 s…...

How API Gateways handle raw TCP packets
How these gateways actually perform their roles at the HTTP packet level? Let’s break it down into something more concrete with examples of how these gateways perform their “unique entrance” function by requiring clients to follow specific protocols, …...