Jetson Orin Nano - SONY imx415 camera驱动开发
目录
前言:
调试准备工作:
修改内核默认打印等级
一、imx415驱动开发
1、硬件接线
2、设备树修改
2.1 创建 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 文件
2.2 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 添加到设备树
2.3 编译设备树
3、imx415驱动开发
3.1 imx415寄存器
1)mclk 时钟
2)lane数量
3)lane速率
4)分辨率
5)像素深度
6)Master/Slave模式
7)启流、停流相关
8)增益
编辑
9)曝光
编辑
10)All pixel模式 4lane 配置表
3.2 imx415驱动
1)Linux_for_Tegra/source/nvidia-oot/drivers/media/i2c/imx415_mode_tbls.h 源码
2)Linux_for_Tegra/source/nvidia-oot/include/media/imx415.h 源码
3)Linux_for_Tegra/source/nvidia-oot/drivers/media/i2c/nv_imx415.c 驱动文件
4)将 nv_imx415 添加到Makefile
二、编译调试
1、编译imx415驱动
2、安装 v4l-utils 并查看 /dev/video0信息
2.1 安装 v4l-utils
2.2 查看 /dev/video0 信息
3、抓拍
3.1 v4l2-ctl 命令验证vi抓拍
3.2 gstreamer英伟达命令抓拍
1)gst-launch-1.0 自动曝光、自动增益抓拍
2)gst-launch-1.0 设置曝光、增益抓拍
三、imx415驱动开发遇到的问题及解决方法
1、Jetson orin nano开发板的CAM0不支持4lane模式
2、使用 CSI0/1 时,需要将lane_polarity改为 6
3、v4l2-ctl 抓图命令报错
4、v4l2-ctl 抓图不成功,vi能收到数据,但数据不对
5、gstreamer抓图偏红色
四、曝光、增益、格式、焦距对拍照效果的影响
前言:
nvidia相机开发参考链接:相机软件开发解决方案 — NVIDIA Jetson Linux 开发者指南
可加载内核模块 (LKM)其实就是就是编译成ko模块。nvidia将所有模块都放在 nvidia-oot 目录下。参考链接:传感器软件驱动程序编程 — NVIDIA Jetson Linux 开发者指南
说明:博主使用野火的imx415摄像头模块,在 Jetson Orin Nano开发板上开发imx415驱动
调试准备工作:
修改内核默认打印等级
$ vi /etc/sysctl.conf
#
# /etc/sysctl.conf - Configuration file for setting system variables
# See /etc/sysctl.d/ for additional system variables.
# See sysctl.conf (5) for information.
##kernel.domainname = example.com# Uncomment the following to stop low-level messages on console
kernel.printk = 8 8 8 8 #打印等级###################################################################
# Functions previously found in netbase
## Uncomment the next two lines to enable Spoof protection (reverse-path filter)
# Turn on Source Address Verification in all interfaces to
# prevent some spoofing attacks
#net.ipv4.conf.default.rp_filter=1
#net.ipv4.conf.all.rp_filter=1# Uncomment the next line to enable TCP/IP SYN cookies
# See http://lwn.net/Articles/277146/一、imx415驱动开发
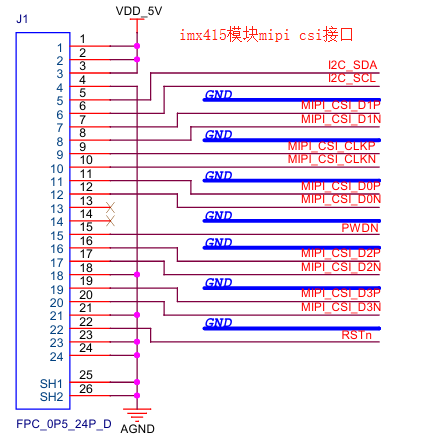
1、硬件接线
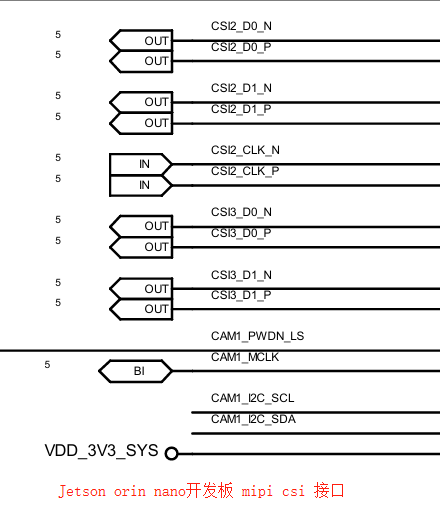
imx415模块和 Jetson orin nano开发板的csi接口中间有转接板。2 lane模式下,仅 CSI_D0 P/N 和 CSI_D1 P/N 有数据。我使用的是 4 lane 模式。
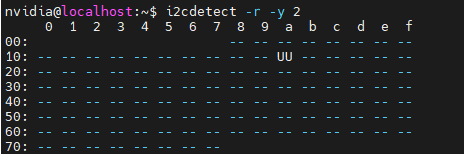
硬件接上后,用 i2cdetect 工具探测 I2C通不通。cam_i2cmux挂在i2c3下,因此命令如下:
$ i2cdetect -r -y 2
可以看到 imx415 的设备地址为 0x1a
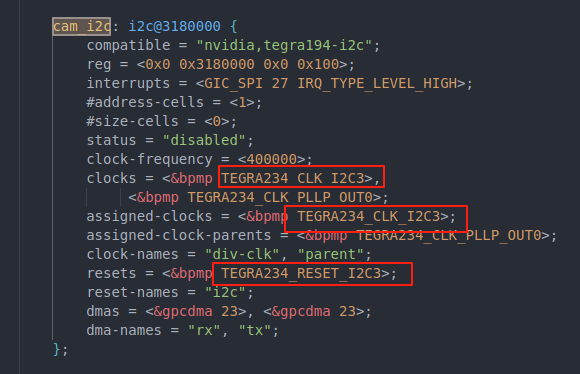
问题:如何知道 CAM1_I2C 挂在 i2c3下?
查看 Linux_for_Tegra/source/hardware/nvidia/t23x/nv-public/tegra234.dtsi
cam_i2c 为I2C3节点, 因此cam_i2cmux在I2C3节点下
2、设备树修改
设备树增加sensor参考文档:Sensor Software Driver Programming — NVIDIA Jetson Linux Developer Guide
2.1 创建 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 文件
1)将 Linux_for_Tegra/source/hardware/nvidia/t23x/nv-public/overlay 目录下的 tegra234-p3767-camera-p3768-imx477-C.dts 作为模板拷贝一份 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi
imx415 模块 4 lane差分线接在CSI2上,CSI2对应"serial_c"(CSI0对应serial_a,依此类推),因此命名 "tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi"
2)修改 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi
关键参数计算过程:
-
compatible = "ridgerun,imx415" 要和imx415驱动对应上
-
mclk_khz:imx415模块外接 37.125M晶振,因此 mclk_khz = "37125"
-
4 lane模式:因此 num_lanes = "4", bus-width = <4>;
-
CSI2:因此 tegra_sinterface = "serial_c",port-index = <2>
-
分辨率:根据 imx415分辨率设置 "active_w = 3864",active_h = "2192"
-
pixel_phase:像素格式,pixel_phase = "gbrg",调试时设置为 "rggb" 导致图像偏红色
-
csi_pixel_bit_depth:像素深度,imx415使用RAW12模式,因此 csi_pixel_bit_depth = "12"
-
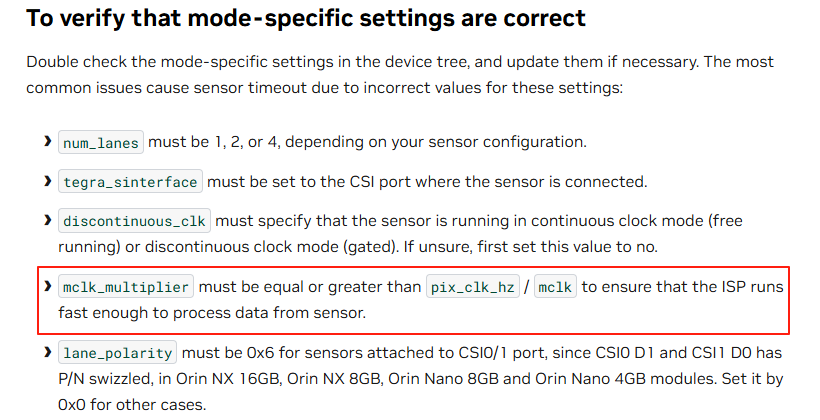
pix_clk_hz:imx415 配置 lane频率为 891 Mbps,4lane,像素深度为12bit,pix_clk_hz = 891 Mbps × 4 / 12 = 297000000,我理解只要不小于此值即可。
-
mclk_multiplier :mclk_multiplier ≥ pix_clk_hz / mclk = 297000000 / 37125000 = 8,因此mclk_multiplier = "8"。从nvidia官方手册可知,
mclk_multiplier必须大于等于pix_clk_hz / mclk,以确保ISP运行得足够快,能够处理来自传感器的数据。
-
增益,查看imx415手册
GAIN_PCG_0计算公式:GAIN_PCG_0 = Gain[dB] x 10 /3

GAIN_PCG_0 范围为 0 - 240d,因此 Gain范围为 0 - 72 [dB],我这里增益因子配置为 gain_factor = "10" ,Gain范围 0 - 72 [dB] 乘上增益因子,得到 min_gain_val = "0", max_gain_val = "720",step为 0.3dB 乘增益因子,因此 step_gain_val = "3"
-
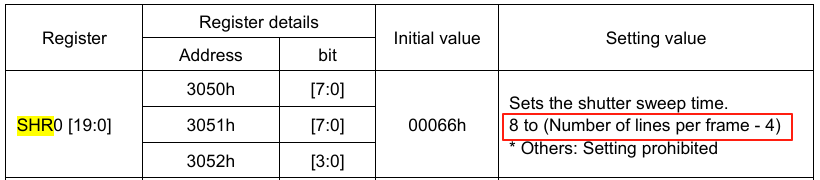
曝光:
曝光参数单位为us,需要根据帧率(30fps)、VMAX(2250)、 SHR0 值范围(8 到 Number oflines per frame - 4),按照下面公式倒推 exposure 最小值、最大值、step,我算得结果图下:
min_exp_time = "15"; /* 单位:us */
max_exp_time = "33214"; /* 单位:us */
step_exp_time = "15"; /* 单位:us */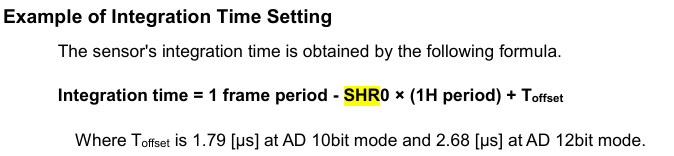
-
embedded_metadata_height:根据imx415手册来配置为 "1",如下图
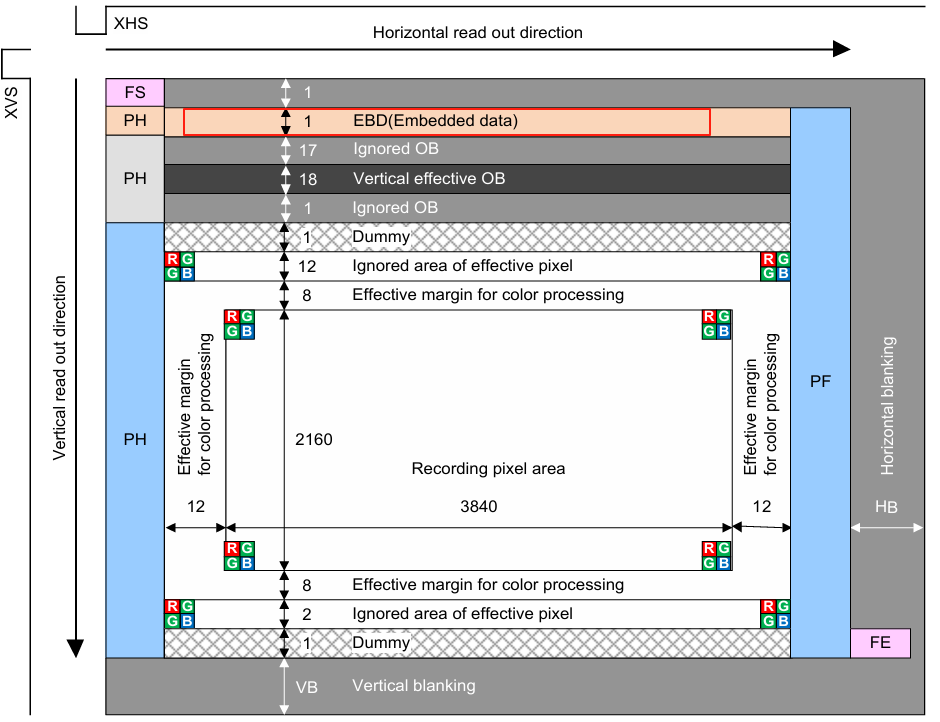
最终 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 文件内容如下:
设备树描述了 VI(视频输入)、NvCSI 、传感器模块 的端口绑定关系
// SPDX-License-Identifier: GPL-2.0-only
// SPDX-FileCopyrightText: Copyright (c) 2023-2024, NVIDIA CORPORATION & AFFILIATES. All rights reserved.///dts-v1/;
///plugin/;#define CAM0_RST TEGRA234_MAIN_GPIO(Q, 6) /* add */
#define CAM0_PWDN TEGRA234_MAIN_GPIO(H, 6)
#define CAM1_PWDN TEGRA234_MAIN_GPIO(AC, 0)
#define CAM_I2C_MUX TEGRA234_AON_GPIO(CC, 3)#include <dt-bindings/tegra234-p3767-0000-common.h>/ {overlay-name = "Camera IMX415-C 4 lane";jetson-header-name = "Jetson 24pin CSI Connector";compatible = JETSON_COMPATIBLE_P3768;/*IMX415 connected on cam0 port */fragment@0 {target-path = "/";__overlay__ {tegra-capture-vi {num-channels = <1>;ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;rbpcv3_imx415_vi_in1: endpoint {port-index = <2>;bus-width = <4>;remote-endpoint = <&rbpcv3_imx415_csi_out1>;};};};};tegra-camera-platform {compatible = "nvidia, tegra-camera-platform";/*** Physical settings to calculate max ISO BW** num_csi_lanes = <>;* Total number of CSI lanes when all cameras are active** max_lane_speed = <>;* Max lane speed in Kbit/s** min_bits_per_pixel = <>;* Min bits per pixel** vi_peak_byte_per_pixel = <>;* Max byte per pixel for the VI ISO case** vi_bw_margin_pct = <>;* Vi bandwidth margin in percentage** max_pixel_rate = <>;* Max pixel rate in Kpixel/s for the ISP ISO case** isp_peak_byte_per_pixel = <>;* Max byte per pixel for the ISP ISO case** isp_bw_margin_pct = <>;* Isp bandwidth margin in percentage*/num_csi_lanes = <4>;max_lane_speed = <1500000>;min_bits_per_pixel = <10>;vi_peak_byte_per_pixel = <2>;vi_bw_margin_pct = <25>;max_pixel_rate = <7500000>;isp_peak_byte_per_pixel = <5>;isp_bw_margin_pct = <25>;/*** The general guideline for naming badge_info contains 3 parts, and is as follows,* The first part is the camera_board_id for the module; if the module is in a FFD* platform, then use the platform name for this part.* The second part contains the position of the module, ex. "rear" or "front".* The third part contains the last 6 characters of a part number which is found* in the module's specsheet from the vendor.*/modules {module1 {badge = "jakku_rear_RBPCV3";position = "rear";orientation = "1";drivernode0 {pcl_id = "v4l2_sensor";sysfs-device-tree = "/sys/firmware/devicetree/base/bus@0/cam_i2cmux/i2c@1/rbpcv3_imx415_c@1a";};};};};bus@0 {host1x@13e00000 {nvcsi@15a00000 {num-channels = <1>;#address-cells = <1>;#size-cells = <0>;channel@0 {reg = <0>;ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;rbpcv3_imx415_csi_in1: endpoint@0 {port-index = <2>;bus-width = <4>;remote-endpoint = <&rbpcv3_imx415_out1>;};};port@1 {reg = <1>;rbpcv3_imx415_csi_out1: endpoint@1 {remote-endpoint = <&rbpcv3_imx415_vi_in1>;};};};};};};cam_i2cmux {status = "okay";compatible = "i2c-mux-gpio";#address-cells = <1>;#size-cells = <0>;mux-gpios = <&gpio_aon CAM_I2C_MUX GPIO_ACTIVE_HIGH>;i2c-parent = <&cam_i2c>;i2c@0 {rbpcv2_imx219_a@10 {status = "disabled";};};i2c@1 {status = "okay";reg = <1>;#address-cells = <1>;#size-cells = <0>;rbpcv2_imx219_c@10 {status = "disabled";};rbpcv3_imx415_c@1a {reset-gpios = <&gpio CAM1_PWDN GPIO_ACTIVE_HIGH>;compatible = "ridgerun,imx415";/* I2C device address */reg = <0x1a>;/* V4L2 device node location */devnode = "video0";/* Physical dimensions of sensor */physical_w = "9.3";physical_h = "4.65";sensor_model = "imx415";use_sensor_mode_id = "true";mode0 { /* IMX415_MODE_3864x2192 */mclk_khz = "37125"; //"24000";num_lanes = "4";tegra_sinterface = "serial_c";phy_mode = "DPHY";discontinuous_clk = "no";dpcm_enable = "false";cil_settletime = "0"; // 0表示自动校准 lane_polarity = "0";active_w = "3864";active_h = "2192";mode_type = "bayer";pixel_phase = "gbrg"; //"rggb";csi_pixel_bit_depth = "12"; //12readout_orientation = "0"; //90line_length = "4400"; //0x08CA "11200";inherent_gain = "1";mclk_multiplier = "8"; //pix_clk_hz / mclk_khz = 297000000 / 37125000 = 8pix_clk_hz = "297000000"; //891 Mbps × 4 / 12gain_factor = "10";framerate_factor = "1000000";exposure_factor = "1000000";min_gain_val = "0"; /* 0dB */max_gain_val = "720"; /* 72dB */step_gain_val = "3"; /* 0.3dB step */default_gain = "10"; /* 1dB */min_hdr_ratio = "1";max_hdr_ratio = "1";min_framerate = "2000000"; /* 2.0 fps */max_framerate = "60000000"; //"30000000"; /* 30.0 fps */step_framerate = "1";default_framerate = "30000000"; /* 30.0 fps */min_exp_time = "15"; /* us, 1H时间 = line_length / pix_clk_hz */max_exp_time = "33214"; //"33334"; /* us */step_exp_time = "15";default_exp_time = "5000"; /* us */embedded_metadata_height = "1"; set_mode_delay_ms = "500"; //dongao 等待8帧};mode1 { /* IMX415_MODE_3864x2192 */mclk_khz = "37125"; //"24000";num_lanes = "4";tegra_sinterface = "serial_c";phy_mode = "DPHY";discontinuous_clk = "no";dpcm_enable = "false";cil_settletime = "0"; // 0表示自动校准 lane_polarity = "0";active_w = "3864";active_h = "2192";mode_type = "bayer";pixel_phase = "gbrg"; //"rggb";csi_pixel_bit_depth = "12"; //10readout_orientation = "0"; //90line_length = "4400"; //0x08CA "11200";inherent_gain = "1";mclk_multiplier = "8";pix_clk_hz = "297000000"; //"356400000";gain_factor = "10";framerate_factor = "1000000";exposure_factor = "1000000";min_gain_val = "0"; /* 0dB */max_gain_val = "720"; /* 72dB */step_gain_val = "3"; /* 0.3dB step */default_gain = "10"; /* 1dB */min_hdr_ratio = "1";max_hdr_ratio = "1";min_framerate = "2000000"; /* 2.0 fps */max_framerate = "60000000"; /* 60.0 fps */step_framerate = "1";default_framerate = "30000000"; /* 60.0 fps */min_exp_time = "15"; /* us */max_exp_time = "33214"; /* us */step_exp_time = "15";default_exp_time = "5000"; /* us */embedded_metadata_height = "1";};ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;rbpcv3_imx415_out1: endpoint {port-index = <2>;bus-width = <4>;remote-endpoint = <&rbpcv3_imx415_csi_in1>;};};};};};};gpio@2200000 { //addcamera-control-output-low {gpio-hog;output-low;gpios = <CAM0_RST 0>;label = "cam0-rst";};};gpio@6000d000 {camera-control-output-low {gpio-hog;output-low;gpios = <CAM1_PWDN 0 CAM0_PWDN 0>;label = "cam1-pwdn", "cam0-pwdn";};};};};};
};
2.2 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 添加到设备树
在 tegra234-p3768-0000+p3767-0000-dynamic.dts 中新增 "#include "tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi"",如下:
// SPDX-License-Identifier: GPL-2.0-only
// SPDX-FileCopyrightText: Copyright (c) 2023-2024, NVIDIA CORPORATION & AFFILIATES. All rights reserved./dts-v1/;
/plugin/;/ {overlay-name = "Tegra234 p3768-0000+p3767-xxxx Dynamic Overlay";
};/** Include this file last in the device tree. It manages run-time*相关文章:
Jetson Orin Nano - SONY imx415 camera驱动开发
目录 前言: 调试准备工作: 修改内核默认打印等级 一、imx415驱动开发 1、硬件接线 2、设备树修改 2.1 创建 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 文件 2.2 tegra234-p3767-camera-p3768-imx415-C-4lane.dtsi 添加到设备树 2.3 编译设备树 3、imx415驱动…...
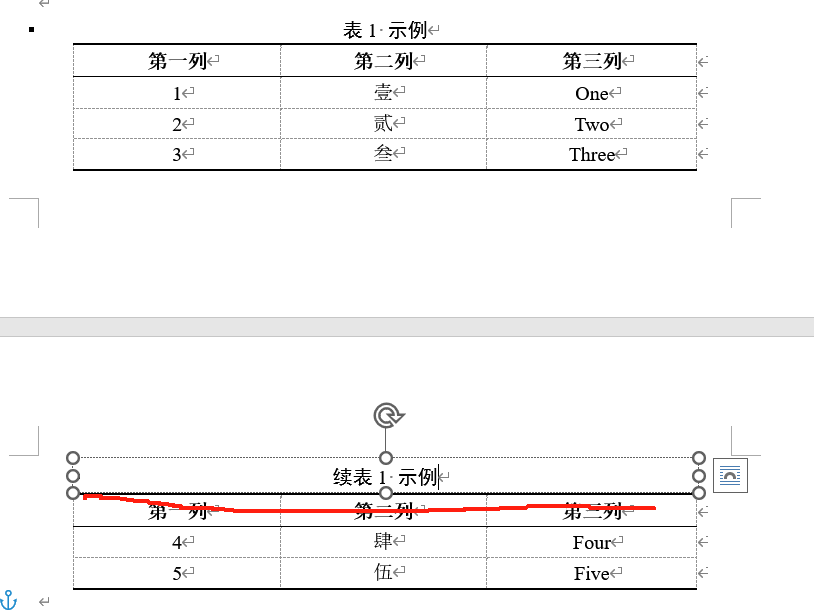
word为跨页表格新加表头和表名
问题: 当表格过长需要跨页时(如下图所示),某些格式要求需要转页接排加续表。 方法一: 1、选中表格,在“表布局”区域点开“自动调整”,选择“固定列宽”(防止后续拆分表格后表格变…...
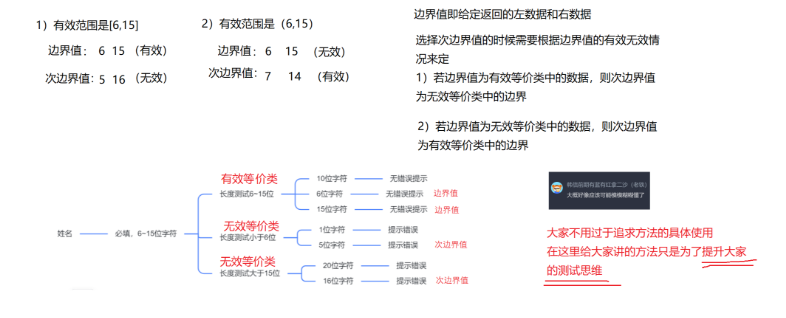
测试用例篇章
本节概要: 测试⽤例的概念 设计测试⽤例的万能思路 设计测试⽤例的⽅法 一、测试用例 1.1 概念 什么是测试用例? 测试⽤例(Test Case)是为了实施测试⽽向被测试的系统提供的⼀组集合,这组集合包含:测…...
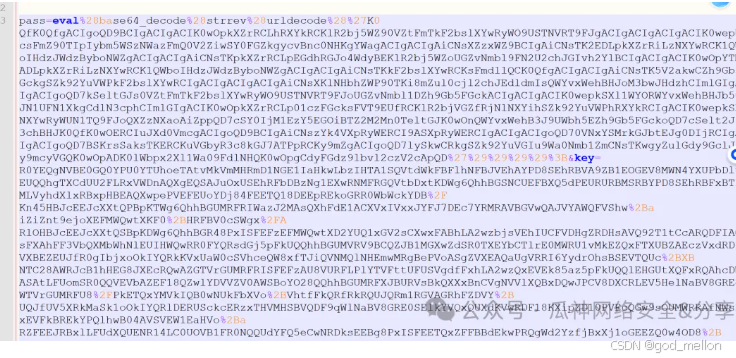
2025年北京市职工职业技能大赛第六届信息通信行业网络安全技能大赛复赛CTF部分WP-哥斯拉流量分析
2025年北京市职工职业技能大赛第六届信息通信行业网络安全技能大赛复赛CTF部分WP-哥斯拉流量分析 一、流量分析 题目没有任何提示,附件gzl.pcap 解题哥斯拉流量300多KB包很多,没啥经验只能挨个看回来之后又狠狠得撸了一把哥斯拉流量分析我这里用的是哥斯拉4.0.1 测试链接…...

Django ToDoWeb 服务
我们的任务是使用 Django 创建一个简单的 ToDo 应用程序,允许用户添加、查看和删除笔记。我们将通过设置 Django 项目、创建 Todo 模型、设计表单和视图来处理用户输入以及创建模板来显示任务来构建它。我们将逐步实现核心功能以有效地管理 todo 项。 Django ToDoWeb 服务 …...

【软件】在 macOS 上安装 Postman
在 macOS 上安装 Postman 是一个简单的过程,以下是详细的步骤: 一、下载 Postman • 访问 Postman 官方网站: 打开浏览器,访问Postman 官方下载页面。 • 下载安装包: 页面会自动识别你的系统,点击“Dow…...
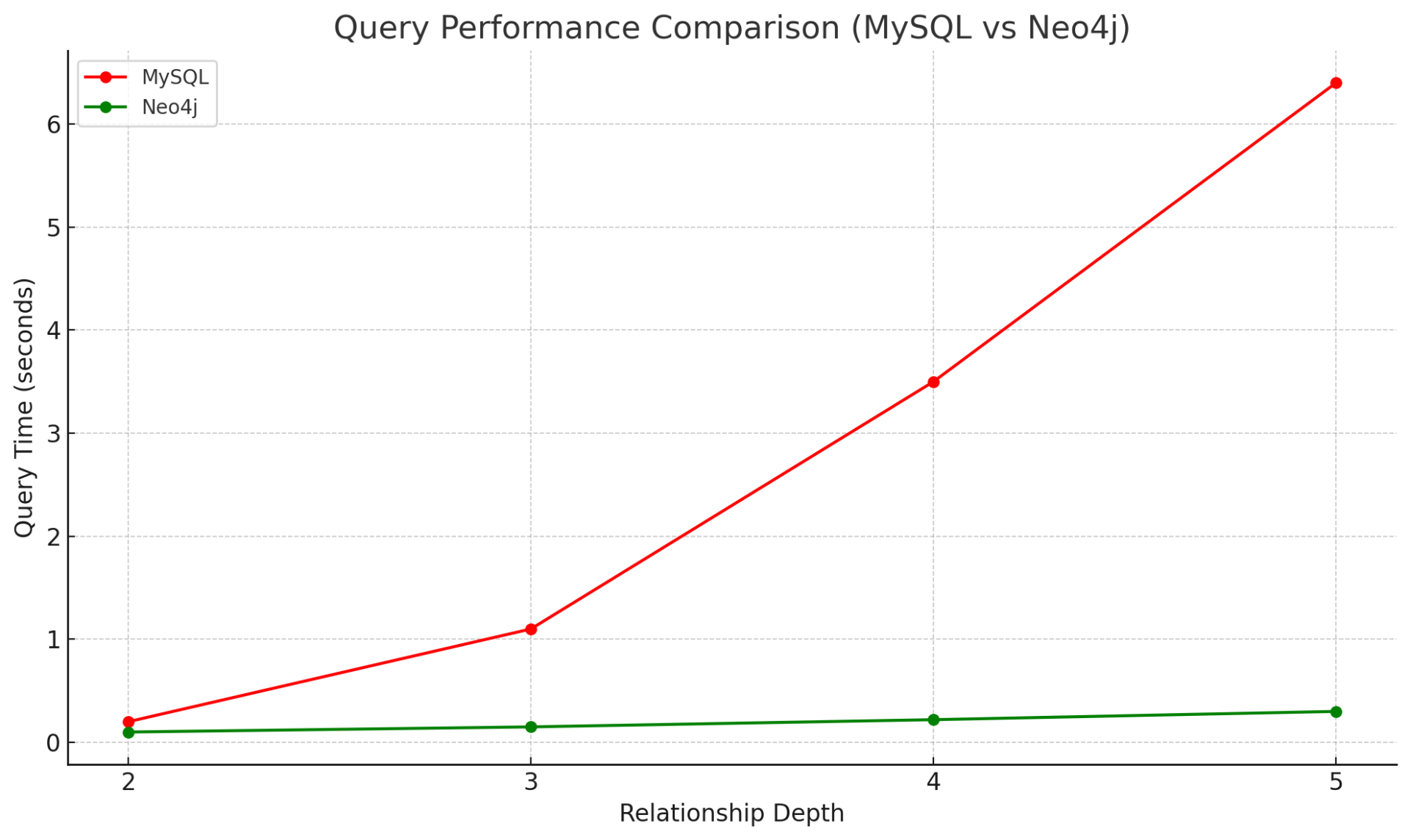
各种数据库,行式、列式、文档型、KV、时序、向量、图究竟怎么选?
慕然回首,发现这些年来涌现出了许多类型的数据库,今天抽空简单回顾一下,以便于后面用到时能快速选择。 1. 关系型数据库(行式) 关系型数据库(RDBMS),我们常说的数据库就是指的关系型数据库。 它的全称是关…...

全志科技携飞凌嵌入式T527核心板亮相OpenHarmony开发者大会
近日,OpenHarmony开发者大会2025(OHDC.2025,以下简称“大会”)在深圳举办,全志科技作为OpenHarmony生态的重要合作伙伴受邀参会,并进行了《全志科技行业智能芯片OpenHarmony方案适配与认证经验分享》的主题…...

AI+微信小程序:智能客服、个性化推荐等场景的落地实践
在移动互联网流量红利逐渐见顶的今天,微信小程序凭借“即用即走”的轻量化特性,已成为企业连接用户的核心阵地。而AI技术的融入,正让小程序从工具型应用进化为“懂用户、会思考”的智能服务终端。本文将结合实际案例,解析AI在微信小程序中的两大核心场景——智能客服与个性…...
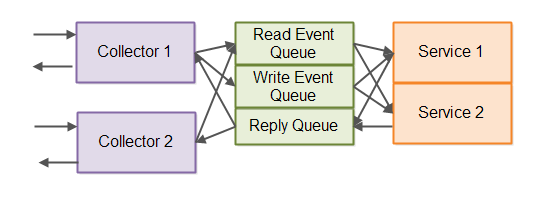
事件驱动架构入门
主要参考资料: 软件架构-事件驱动架构: https://blog.csdn.net/liuxinghao/article/details/113923639 目录 简介事件队列事件日志事件收集器响应队列读事件 vs. 写事件 简介 事件驱动架构是一种系统或组件之间通过发送事件和响应事件彼此交互的架构风格。当某个事…...

基于Web的濒危野生动物保护信息管理系统设计(源码+定制+开发)濒危野生动物监测与保护平台开发 面向公众参与的野生动物保护与预警信息系统
博主介绍: ✌我是阿龙,一名专注于Java技术领域的程序员,全网拥有10W粉丝。作为CSDN特邀作者、博客专家、新星计划导师,我在计算机毕业设计开发方面积累了丰富的经验。同时,我也是掘金、华为云、阿里云、InfoQ等平台…...

索引的选择与Change Buffer
1. 索引选择与Change Buffer 问题引出:普通索引 vs 唯一索引 ——如何选择? 在实际业务中,如果一个字段的值天然具有唯一性(如身份证号),并且业务代码已确保无重复写入,那就存在两种选择&…...
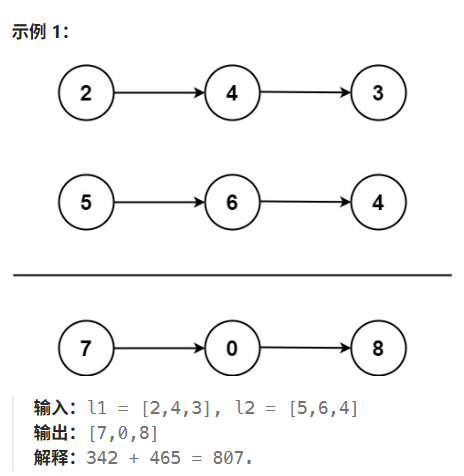
leetcode hot100刷题日记——30.两数之和
解答: 方法一:迭代 迭代大致过程就是: 算两条链表的当前位的和,加上上一位留下来的进位,就是新链表的当前位的数字。计算当前的进位。 这样,我们迭代需要的东西是:链表1,链表2&…...
Fastapi 学习使用
Fastapi 学习使用 Fastapi 可以用来快速搭建 Web 应用来进行接口的搭建。 参考文章:https://blog.csdn.net/liudadaxuexi/article/details/141062582 参考文章:https://blog.csdn.net/jcgeneral/article/details/146505880 参考文章:http…...

Ollama:本地大模型推理与应用的创新平台
引言 随着大语言模型(LLM)和生成式AI的快速发展,越来越多的开发者和企业希望在本地或私有环境中运行AI模型,以满足数据隐私、安全、低延迟和定制化的需求。Ollama 正是在这一背景下诞生的创新平台。它让大模型的本地部署、推理和集成变得前所未有的简单和高效。本文将系统…...

rtpinsertsound:语音注入攻击!全参数详细教程!Kali Linux教程!
简介 2006年8月至9月期间,我们创建了一个用于将音频插入指定音频(即RTP)流的工具。该工具名为rtpinsertsound。 该工具已在Linux Red Hat Fedora Core 4平台(奔腾IV,2.5 GHz)上进行了测试,但预…...

django项目开启debug页面操作有数据操作记录
在项目的主文件中setting中配置 """ Django settings for ProjectPrictice project.Generated by django-admin startproject using Django 3.0.1.For more information on this file, see https://docs.djangoproject.com/en/3.0/topics/settings/For the ful…...

【Vim】高效编辑技巧全解析
本篇将从光标移动技巧、常用快捷操作、组合命令运用等方面逐步讲解 vim 的使用。 📘 高效光标移动技巧 在 Vim 中,光标移动是编辑效率的核心之一。以下是一些必须掌握的移动命令,按使用频率和实用程度分类整理: 🔹 基…...

基于 Node.js 的 Express 服务是什么?
Express 是基于 Node.js 的一个轻量级、灵活的 Web 应用框架,用于快速构建 HTTP 服务(如网站、API 接口等),以下是详细解析: 一、Express 的核心作用 简化 Node.js 原生开发 Node.js 原生 http 模块虽…...
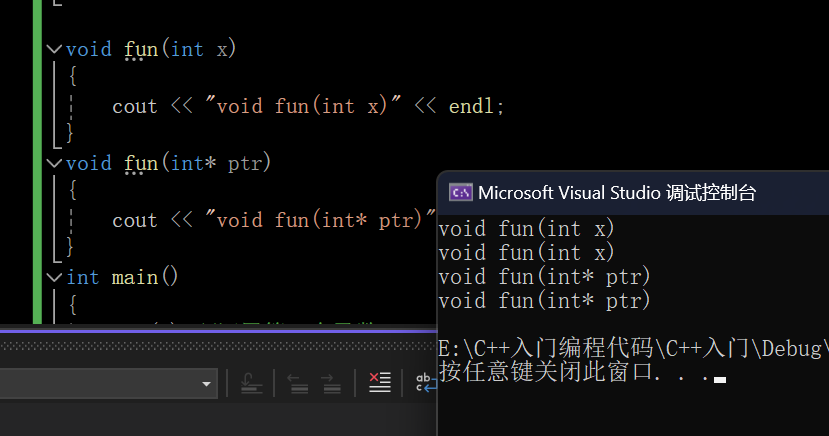
【C++】入门基础知识(1.5w字详解)
本篇博客给大家带来的是一些C基础知识!包含函数栈帧的详解! 🐟🐟文章专栏:C 🚀🚀若有问题评论区下讨论,我会及时回答 ❤❤欢迎大家点赞、收藏、分享! 今日思想࿱…...

Excel数据脱敏利器:自动保留格式的智能脱敏脚本
源码: import openpyxl import re import random import string from openpyxl.utils import get_column_letter from copy import copy from tqdm import tqdmdef mask_data(value):"""脱敏处理数据"""if isinstance(value, str):i…...

Photoshop2025(PS2025)软件及安装教程
在数字图像编辑领域,Adobe Photoshop 一直是无可争议的王者。如今,Photoshop 2025 重磅登场,再次为我们带来了惊喜与变革,进一步巩固了它在行业中的领先地位。 Photoshop 2025 在人工智能方面的升级令人瞩目。其全新的 “Magic Se…...

AI赋能开源:如何借助MCP快速解锁开源项目并提交你的首个PR
引子 很多同学都梦想为开源项目贡献力量,然而现实往往是——面对庞大复杂的项目,从入门到提交第一个有实质性代码的PR,时间跨度可能长达数年。传统路径通常是先从文档贡献开始,逐步深入理解项目架构,最终才能进行代码…...
)
计算机视觉---GT(ground truth)
在计算机视觉(Computer Vision, CV)领域,Ground Truth(GT,中文常译为“真值”或“ ground truth”) 是指关于数据的真实标签或客观事实,是模型训练、评估和验证的基准。它是连接算法与现实世界的…...

SQL进阶之旅 Day 9:高级索引策略
【SQL进阶之旅 Day 9】高级索引策略 在SQL查询性能调优中,索引是最为关键的优化手段之一。Day 3我们已经介绍了基础索引类型,今天我们将深入探讨高级索引策略,包括覆盖索引、索引选择性分析、强制使用索引等实用技巧。这些技术能显著提升复杂…...
R 语言科研绘图第 52 期 --- 网络图-分组
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。 为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式: R 语言科研绘图模板 --- sciRplothttps://mp.…...
姜老师的MBTI课程:MBTI是可以转变的
我们先来看内向和外向这条轴,I和E内向和外向受先天遗传因素的影响还是比较大的,因为它事关到了你的硬件,也就是大脑的模型。但是我们在大五人格的排雷避坑和这套课程里面都强调了一个观点,内向和外向各有优势,也各有不…...
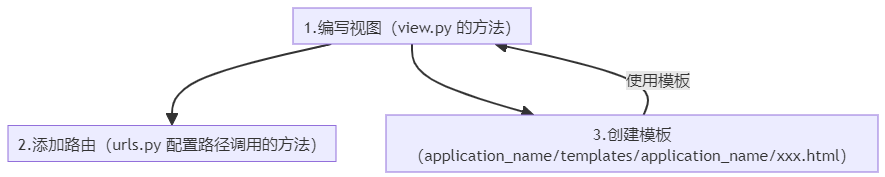
Django【应用 02】第一个Django应用开发流程图
第 1 部分 安装 Django创建项目初始化应用配置视图、路由 第 2 部分 数据库配置语言和时区配置应用设置表初始化模型创建、激活、表创建管理员账号创建应用加入管理页面 第 3 部分 更多视图(添加模板及模板调用、render、get_object_or_404、去除模板里的硬编码…...

湖北理元理律师事务所:用科学规划重塑债务人生
在债务问题日益普遍的当下,如何平衡还款压力与生活质量成为社会性难题。湖北理元理律师事务所通过“债务优化生活保障”的双轨服务模式,为债务人构建可持续的解决方案。其核心逻辑在于:债务处置不是剥夺生活,而是重建财务秩序。 …...

《江西棒球资讯》棒球运动发展·棒球1号位
联赛体系结构 | League Structure MLB模式 MLB采用分层体系(大联盟、小联盟),强调梯队建设和长期发展。 MLB operates a tiered system (Major League, Minor League) with a focus on talent pipelines and long-term development. 中国现…...