stm32——SPI协议
stm32——SPI协议
STM32的SPI(Serial Peripheral Interface,串行外设接口)协议是一种高速、全双工、同步的串行通信协议,广泛评估微控制器与各种外设(如传感器、器件、显示器、模块等)之间的数据传输。STM32微控制器内置的SPI外设具有高度可配置性,支持多种操作模式和数据格式。
1. SPI协议概述
- 主从架构(Master-Slave Architecture):SPI通信采用主从模式。通常有一个主设备(Master)和多个从设备(Slave)。主设备负责发起通信、提供时钟信号,并选择通信的从设备。从设备在被选中时响应主设备的请求。
- 同步通信(Synchronous Communication):数据传输由一个共享的时钟信号(SCK)同步。主设备产生并控制SCK信号。
- 全双工(Full-Duplex):SPI支持同时进行数据发送和接收,即发送和接收通道是独立的。
2. SPI的四根基本信号线
典型的SPI通信使用四根信号线:
- SCK (Serial Clock):串行时钟线。由主设备生成,用于同步主设备和从设备之间的数据传输。
- MOSI (Master Out Slave In):主设备输出,从设备输入。主设备通过此线向从设备发送数据。
- MISO(Master In Slave Out):主设备输入,从设备输出。从设备通过此线向主设备发送数据。
- SS/ CS (Slave Select / Chip Select) :从设备选择/片选线。由主设备控制,用于选择通信的从设备。当SS/CS线为低电平(通常为活动低电平)时,对应的从设备被选中并准备好进行通信;当为高电平时,从设备在非选中状态,其MISO线通常会呈高阻态,允许从其他设备共享MISO线。
图1:SPI通信基本连接图(单主多从)
+---------------------+ +---------------------+| Master | | Slave 1 || | | |SCK <---|---------------------|------> SCK <---| |MOSI <---|---------------------|------> MOSI <---| |MISO <---|---------------------|<------ MISO <---| |CS1 <---|---------------------|------> SS/CS <---| |CS2 <---|---------------------+ +---------------------+| Master || | +---------------------+| | | Slave 2 || | | |SCK <---|---------------------|------> SCK <---| |MOSI <---|---------------------|------> MOSI <---| |MISO <---|---------------------|<------ MISO <---| |CS1 <---| | | |CS2 <---|---------------------|------> SS/CS <---| |+---------------------+ +---------------------+
说明:
SCK、MOSI、MISO线路在多个从设备之间是共享的。- 每个从设备都需要布线独立的
SS/CS线路,主设备通过将对应从设备的SS/CS线路拉低来选择通信的从设备。
3. STM32 SPI工作模式(CPOL和CPHA)
SPI协议的灵活体现在其四种工作模式上,这由时钟时钟(CPOL)和时钟相位(CPHA)两个参数决定。
-
CPOL (Clock Polarity)
:时钟按钮。定义了SCK信号在空闲状态时的电平。
CPOL=0:SCK闲置时间为低水平。CPOL=1:SCK闲暇时间为高档次。
-
CPHA (Clock Phase)
:时钟相位。定义了数据在SCK的哪个边沿被采样。
CPHA=0:数据在SCK的第一个时钟边沿(上升沿或下降沿,CPOL)进行采样。CPHA=1:数据在SCK的第二个时钟边沿(上升沿或下降沿,CPOL)进行采样。
这四个组合组成了四种SPI模式:
- Mode 0 : CPOL=0, CPHA=0 (闲置低电平,第一个边沿采样)
- 模式1:CPOL=0,CPHA=1(闲置低水平,第二个边沿采样)
- 模式2:CPOL=1,CPHA=0(闲置高水平,第一个边沿采样)
- 模式3:CPOL=1,CPHA=1(闲置高水平,第二个边沿采样)
图2:SPI四种工作模式的交互图
SCK (CPOL=0, CPHA=0)
空闲低电平____ ____ ____
_____| |______| |______| |____^ ^| |采样点 移位点 (数据输出)SCK (CPOL=0, CPHA=1)
空闲低电平____ ____ ____
_____| |______| |______| |____^ ^| |移位点 采样点SCK (CPOL=1, CPHA=0)
空闲高电平
____ ____ ____|______| |______| |____^ ^| |采样点 移位点 (数据输出)SCK (CPOL=1, CPHA=1)
空闲高电平
____ ____ ____|______| |______| |____^ ^| |移位点 采样点
说明:
- 采样点(Sampling Edge):接收设备读取数据位的时钟边沿。
- 升降点(Shift Edge):发送设备将数据位输出到数据线的时钟边沿。
在通信过程中,主设备和从设备必须配置为相同的SPI模式,否则通信将无法正常进行。
4. STM32 SPI数据传输流程
SPI通信是基于移位寄存器的。主设备和从设备内部都有一个移位寄存器。当主设备启动通信时,它会拉低目标从设备的SS/CS线,然后开始生成SCK时钟信号。
在每个时钟周期:
- 主设备将要发送的数据位从其MOSI线上移出。
- 从设备将要发送的数据位从其MISO线路移出。
- 同时,主设备从MISO线接收数据位,从设备从MOSI线接收数据位。
这个过程就像两个升降台首尾相连,数据在主从设备之间“循环”移动。即使只需要单向传输数据,SPI也通常会进行双向数据交换(例如,主设备发送数据时,从设备会发送一些无效数据或初始数据)。
图3:SPI数据传输地图(全双工)
+-----------+ +-----------+| Master | | Slave || Shift | | Shift || Register | | Register |+-----------+ +-----------+| |MOSI <-----|-------------------------|-----> 数据从主设备发送到从设备(Master Out, Slave In)MISO <-----|-------------------------|<---- 数据从从设备发送到主设备(Master In, Slave Out)SCK <-----|-------------------------|-----> 时钟信号 (由主设备提供)SS/CS<-----|------------[选择从设备]------> 片选信号 (由主设备控制)
说明:
- 在每个时钟边沿,主设备和从设备同时进行数据的发送和接收。
- 数据通常为MSB ( Most Significant Bit) First(最高有效位优先)传输,但STM32也支持LSB First(最低有效位优先)传输。
5. STM32 SPI高级特性
STM32的SPI外设还支持以下高级功能,以提高通信效率和可靠性:
- 数据帧格式:支持Motorola和TI帧格式。
- 数据大小:可配置4位到16位数据帧。
- 预分频器(Prescaler):SPI时钟可以通过预分频器进行分频,以调整通信速度。SPI时钟速度不能超过内部中断频率的一半。
- DMA(Direct Memory Access):支持DMA传输,可以将数据直接从内存传输到SPI外设或从SPI外设传输到内存,从而减少CPU的干预,提高数据吞吐量。
- CRC (Cyclic Redundancy Check):支持硬件CRC校验,提高数据传输的可靠性。
- 中断(Interrupts):SPI外设置可以生成多种中断请求,如串口中断、串口非空中断、错误中断等,方便软件进行事件处理。
- 半双工和只收/只发送模式:除了全双工模式,STM32 SPI还支持半双工(消耗毛发数据线)以及只接收或只发送模式。
6. STM32 SPI配置流程(HAL库示例)
使用STM32Cube HAL库配置SPI通常包括以下步骤:
-
使能时钟:使能SPI外部设置和相关GPIO端口的时钟。
-
GPIO配置:配置SPI引脚(SCK、MOSI、MISO、SS/CS)为复用功能或通用推挽输出(用于软件SS)。
-
SPI参数初始化
:配置SPI实例,包括:
- 模式(主/从)
- 数据方向(全双工、半双工等)
- 数据大小(8位、16位)
- CPOL、CPHA
- 波特率预分频器
- 软件/硬件 NSS 管理
- 主要传输顺序(MSB/LSB)
-
使能SPI外设: 启用SPI模块。
-
数据传输:调用HAL库函数进行数据发送、接收或收发,可以通过阻塞模式(Polling)、中断模式(Interrupt)或DMA模式。
代码示例(STM32)
1.STM32 SPI操作的整体流程
- GPIO初始化:配置SPI相关的GPIO引脚(SCK, MISO, MOSI, 以及任选的SS/CS)作为对应的复用功能。
- SPI外设时钟使能:使能SPI外设时钟。
- SPI初始化:配置SPI的工作模式(主/从)、数据方向、数据帧大小、时钟相位、时钟相位、波特率预分频参数等。
- SS/CS 引脚控制(如果使用软件 SS):如果不使用硬件 SS,则需要手动控制一个 GPIO 引脚作为片选信号。
- 数据传输:调用HAL库提供的发送、接收或收发函数。
- 错误处理与中断/DMA回调(如果使用):在中断或DMA模式下,处理中断回调函数中的数据和错误。
2.具体函数操作顺序(使用STM32CubeIDE生成的HAL库为例)
假设我们使用STM32CubeIDE生成了项目,并且已经配置好SPI外设。以下是核心的代码片段和函数调用顺序:
2.1. 物品工作(通常由CubeIDE自动生成)
在main.c文件中,你会看到以下结构:
// 定义一个SPI句柄
SPI_HandleTypeDef hspi1; // 假设使用SPI1// GPIO初始化函数声明
static void MX_GPIO_Init(void);
// SPI初始化函数声明
static void MX_SPI1_Init(void);int main(void)
{/* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init(); // 1. HAL库初始化/* Configure the system clock */SystemClock_Config(); // 2. 系统时钟配置/* Initialize all configured peripherals */MX_GPIO_Init(); // 3. GPIO初始化MX_SPI1_Init(); // 4. SPI外设初始化/* Infinite loop */while (1){/* Add user code here */}
}
2.2. GPIO 初始化函数 ( MX_GPIO_Init)
该函数通常由CubeIDE根据你在GPIO配置页面的设置自动生成。它使能GPIO时钟,并配置各个引脚的模式、上下拉、速度等。
// Example: GPIO init for SPI1 (Master, Full-Duplex, Software NSS)
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOA_CLK_ENABLE(); // Enable GPIOA clock (assuming SPI1 uses PA5, PA6, PA7)__HAL_RCC_GPIOC_CLK_ENABLE(); // Enable GPIOC clock (assuming PC4 for SS/CS)/*Configure GPIO pin : PC4 (CS pin) */GPIO_InitStruct.Pin = GPIO_PIN_4;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // Output Push-Pull for SS/CSGPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // Low speed for SS/CSHAL_GPIO_Init(GPIOC, &GPIO_InitStruct);/*Configure GPIO pins : PA5 (SCK), PA6 (MISO), PA7 (MOSI) */GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7; // SCK, MISO, MOSIGPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // Alternate Function Push-PullGPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; // High speed for SPI dataGPIO_InitStruct.Alternate = GPIO_AF5_SPI1; // Set alternate function to SPI1HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
2.3. SPI外设初始化函数 ( MX_SPI1_Init)
该函数也是由CubeIDE自动生成,负责配置SPI的各种工作参数。
static void MX_SPI1_Init(void)
{/* SPI1 parameter configuration*/hspi1.Instance = SPI1; // 选择SPI1外设hspi1.Init.Mode = SPI_MODE_MASTER; // 配置为SPI主模式hspi1.Init.Direction = SPI_DIRECTION_2LINES; // 双线全双工模式 (MOSI和MISO)hspi1.Init.DataSize = SPI_DATASIZE_8BIT; // 数据帧大小为8位hspi1.Init.CLKPolarity = SPI_POLARITY_LOW; // 时钟极性:空闲时SCK为低电平 (CPOL=0)hspi1.Init.CLKPhase = SPI_PHASE_1EDGE; // 时钟相位:数据在第一个时钟边沿采样 (CPHA=0)hspi1.Init.NSS = SPI_NSS_SOFT; // 软件片选管理 (如果使用硬件SS,改为SPI_NSS_HARD_INPUT/OUTPUT)hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16; // 波特率预分频,例如PCLK / 16hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB; // MSB优先传输hspi1.Init.TIMode = SPI_TIMODE_DISABLE; // 禁用TI模式hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; // 禁用CRC校验hspi1.Init.CRCPolynomial = 10; // CRC多项式 (如果CRC开启)// 调用HAL库函数进行SPI初始化if (HAL_SPI_Init(&hspi1) != HAL_OK){Error_Handler(); // 初始化失败,调用错误处理函数}
}
函数操作顺序总结(初始化阶段):
-
HAL_Init():初始化HAL库,包括系统时钟、Systick等。 -
SystemClock_Config():配置系统时钟(通常由CubeIDE生成)。 -
MX_GPIO_Init()__HAL_RCC_GPIOx_CLK_ENABLE():使能所有相关GPIO端口的时钟。HAL_GPIO_Init():配置每个SPI引脚的模式、速度、上下拉、复用功能等。
-
MX_SPI1_Init()__HAL_RCC_SPIx_CLK_ENABLE():使能SPI外部设定的时钟。- 配置
hspi1结构体成员(Instance,Mode,Direction,DataSize,CLKPolarity,CLKPhase,NSS,BaudRatePrescaler,FirstBit,TIMode,CRCCalculation,CRCPolynomial)。 HAL_SPI_Init(&hspi1): 调用HAL库函数执行SPI硬件初始化。
2.4. 数据传输操作
在main函数的while(1)循环中,可以执行数据传输操作。在每次通信之前,确保将目标设备的SS/CS引脚拉低,通信结束后再拉高。
使用软件NSS(推荐):
#define SLAVE_CS_PORT GPIOC
#define SLAVE_CS_PIN GPIO_PIN_4// 示例:发送数据
uint8_t txData[] = {0x01, 0x02, 0x03};
uint8_t rxData[3];
HAL_StatusTypeDef status;// 1. 拉低片选信号,选择从设备
HAL_GPIO_WritePin(SLAVE_CS_PORT, SLAVE_CS_PIN, GPIO_PIN_RESET); // CS low// 2. 发送数据 (阻塞模式)
status = HAL_SPI_Transmit(&hspi1, txData, sizeof(txData), HAL_MAX_DELAY); // 发送3个字节
if (status != HAL_OK)
{// Handle Error
}// 或者:接收数据 (阻塞模式)
status = HAL_SPI_Receive(&hspi1, rxData, sizeof(rxData), HAL_MAX_DELAY); // 接收3个字节
if (status != HAL_OK)
{// Handle Error
}// 或者:发送和接收数据 (阻塞模式)
status = HAL_SPI_TransmitReceive(&hspi1, txData, rxData, sizeof(txData), HAL_MAX_DELAY); // 同时发送和接收3个字节
if (status != HAL_OK)
{// Handle Error
}// 3. 拉高片选信号,释放从设备
HAL_GPIO_WritePin(SLAVE_CS_PORT, SLAVE_CS_PIN, GPIO_PIN_SET); // CS high// 4. 等待一段时间或执行其他操作
HAL_Delay(10); // 例如,等待10ms
函数操作顺序总结(数据传输阶段 - 支撑模式):
HAL_GPIO_WritePin(SLAVE_CS_PORT, SLAVE_CS_PIN, GPIO_PIN_RESET):拉低 SS/CS从设备中选中。- 选择传输函数
HAL_SPI_Transmit(&hspi1, pTxData, Size, Timeout): 发送数据。HAL_SPI_Receive(&hspi1, pRxData, Size, Timeout): 接收数据(发送空字节)。HAL_SPI_TransmitReceive(&hspi1, pTxData, pRxData, Size, Timeout):同时发送和接收数据。
HAL_GPIO_WritePin(SLAVE_CS_PORT, SLAVE_CS_PIN, GPIO_PIN_SET):拉高SS/CS以从设备释放。
2.5. 中断和DMA模式(高级应用)
如果使用中断或DMA模式,数据传输函数此时非阻塞的,并且需要处理回调函数:
中断模式:
-
使能SPI中断
MX_SPI1_Init()之后,通常会包含以下代码(或在CubeIDE中勾选):
HAL_NVIC_SetPriority(SPI1_IRQn, 0, 0); // 设置中断优先级 HAL_NVIC_EnableIRQ(SPI1_IRQn); // 使能SPI1中断 -
传输函数
HAL_SPI_Transmit_IT(&hspi1, pTxData, Size)HAL_SPI_Receive_IT(&hspi1, pRxData, Size)HAL_SPI_TransmitReceive_IT(&hspi1, pTxData, pRxData, Size)
-
中断回调函数
HAL_SPI_TxCpltCallback(&hspi1): 发送完成回调HAL_SPI_RxCpltCallback(&hspi1): 接收完成回调HAL_SPI_TxRxCpltCallback(&hspi1): 收发完成回调HAL_SPI_ErrorCallback(&hspi1): 错误回调
DMA模式:
- 配置DMA通道:在CubeIDE中配置DMA(Tx和Rx)。
- 传输函数
HAL_SPI_Transmit_DMA(&hspi1, pTxData, Size)HAL_SPI_Receive_DMA(&hspi1, pRxData, Size)HAL_SPI_TransmitReceive_DMA(&hspi1, pTxData, pRxData, Size)
- DMA中断回调函数:与中断模式类似,DMA传输完成后会触发对应的SPI回调函数。
函数操作顺序总结(中断/DMA模式):
- 初始化阶段
- 确定中断或DMA配置正确(使能中断/DMA通道,设置优先级)。
HAL_SPI_Init()内部会处理中断使能(如果是中断模式)或DMA关联。
- 传输等级
HAL_GPIO_WritePin()(SS/CS 低)- 调用
HAL_SPI_Transmit_IT/DMA()或HAL_SPI_Receive_IT/DMA()或HAL_SPI_TransmitReceive_IT/DMA()。这些函数会立即返回。 - 在主程序中,可以执行其他任务。
- 等待或响应回调:在
HAL_SPI_TxCpltCallback、HAL_SPI_RxCpltCallback或HAL_SPI_TxRxCpltCallback中处理数据完成的逻辑。 - 在这些回调函数中,通常会执行
HAL_GPIO_WritePin()(SS/CS high)来从设备释放,或者触发下一个传输。 - 处理
HAL_SPI_ErrorCallback中的错误。
3、注意事项
- 时钟匹配:确保STM32主设备和从设备的SPI模式(CPOL和CPHA)完全匹配。
- SS/CS管理:这是SPI通信的关键。一定要在每次通信前拉低SS/CS,结束通信后拉高,以确保从设备正确响应。如果是多从设备,每次只能选中一个从设备。
- 数据蜡烛图:确定发送和接收蜡烛图的大小足以容纳所有数据。
- 错误处理:经常检查HAL函数的返回值,并在出现
HAL_ERROR或HAL_TIMEOUT时进行适当的错误处理。 - 同步与异步:阻塞模式(轮询)简单但效率低;中断和DMA模式更复杂但能提高CPU利用率和数据吞吐量。
- 数据字节顺序:默认为MSB First,如果从设备为LSB First,需要在初始化时修改
FirstBit成员。
以上是使用STM32 HAL库进行SPI通信的典型函数操作顺序。实际项目中,可能会根据具体的设备和应用需求进行参数。
总结:
STM32的SPI协议是一种强大而灵活的串行通信方式。了解其主从架构、四线连接、CPOL/CPHA定义的工作模式以及数据传输机制,对于在STM32项目中有效地应用SPI关键。STM32提供了丰富的硬件特性和灵活的软件配置选项,能够满足各种应用场景下的高速、可靠的通信需求。
相关文章:

stm32——SPI协议
stm32——SPI协议 STM32的SPI(Serial Peripheral Interface,串行外设接口)协议是一种高速、全双工、同步的串行通信协议,广泛评估微控制器与各种外设(如传感器、器件、显示器、模块等)之间的数据传输。STM3…...

Linux 下如何查看进程的资源限制信息?
简介 Linux 上的 cat /proc/$pid/limits 命令提供有关特定进程的资源限制的信息,其中 $pid 是相关进程的进程 ID (pid)。该文件是 /proc 文件系统的一部分,该文件系统是一个虚拟文件系统,提供有关进程和系统资源的信息…...

【备忘】php命令行异步执行超长时间任务
环境说明: 操作系统:windows10 IDE:phpstorm 开发语言:php7.4 框架:thinkphp5.1 测试环境:linuxwindows均测试通过。 初级方法: function longRunningTask() {$root_path Tools::get_ro…...

对于ARM开发各种手册的分类
手册名称全称主要内容适用范围是不是讲SysTick?Cortex-M3 Technical Reference Manual (TRM)Cortex-M3 Technical Reference Manual描述 Cortex-M3内核架构,如寄存器模型、总线接口、指令集、异常模型只适合 Cortex-M3 内核,不含外设❌ 没有C…...

java开发中#和$的区别
在Spring框架中,$ 和 # 是两种不同的表达式前缀,用于从不同的来源获取值或执行计算。下面详细解释它们的区别和用法: 一、$ 占位符(Property Placeholder) 1. 作用 从配置文件(如 application.propertie…...
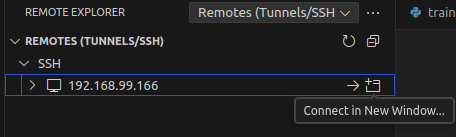
在 RK3588 上通过 VSCode 远程开发配置指南
在 RK3588 上通过 VSCode 远程开发配置指南 RK3588 设备本身不具备可视化编程环境,但可以通过 VSCode 的 Remote - SSH 插件 实现远程代码编写与调试。以下是完整的配置流程。 一、连接 RK3588 1. 安装 Debian 系统 先在 RK3588 上安装 Debian 操作系统。 2. 安…...

OpenHarmony标准系统-HDF框架之音频驱动开发
文章目录 引言OpenHarmony音频概述OpenHarmony音频框图HDF音频驱动框架概述HDF音频驱动框图HDF音频驱动框架分析之音频设备驱动HDF音频驱动框架分析之supportlibs实现HDF音频驱动框架分析之hdi-passthrough实现HDF音频驱动框架分析之hdi-bindev实现HDF音频驱动加载过程HDF音频驱…...

HTML Day03
Day03 0. 引言1. CSS1.1 CSS的3种使用方法1.2 内联样式1.3 内部样式表1.4 外部CSS文件 2. 图像3. 表格3.1单元格间距和单元格边框 4. 列表4.1 有序表格的不同类型4.2 不同类型的无序表格4.3 嵌套列表 5. 区块6. 布局6.1 div布局6.2 表格布局 0. 引言 HELLO ^ _ ^大家好…...

篇章六 数据结构——链表(二)
目录 1. LinkedList的模拟实现 1.1 双向链表结构图编辑 1.2 三个简单方法的实现 1.3 头插法 1.4 尾插法 1.5 中间插入 1.6 删除 key 1.7 删除所有key 1.8 clear 2.LinkedList的使用 2.1 什么是LinkedList 5.2 LinkedList的使用 1.LinkedList的构造 2. LinkedList的…...

Python60日基础学习打卡Day39
昨天我们介绍了图像数据的格式以及模型定义的过程,发现和之前结构化数据的略有不同,主要差异体现在2处 模型定义的时候需要展平图像由于数据过大,需要将数据集进行分批次处理,这往往涉及到了dataset和dataloader来规范代码的组织…...
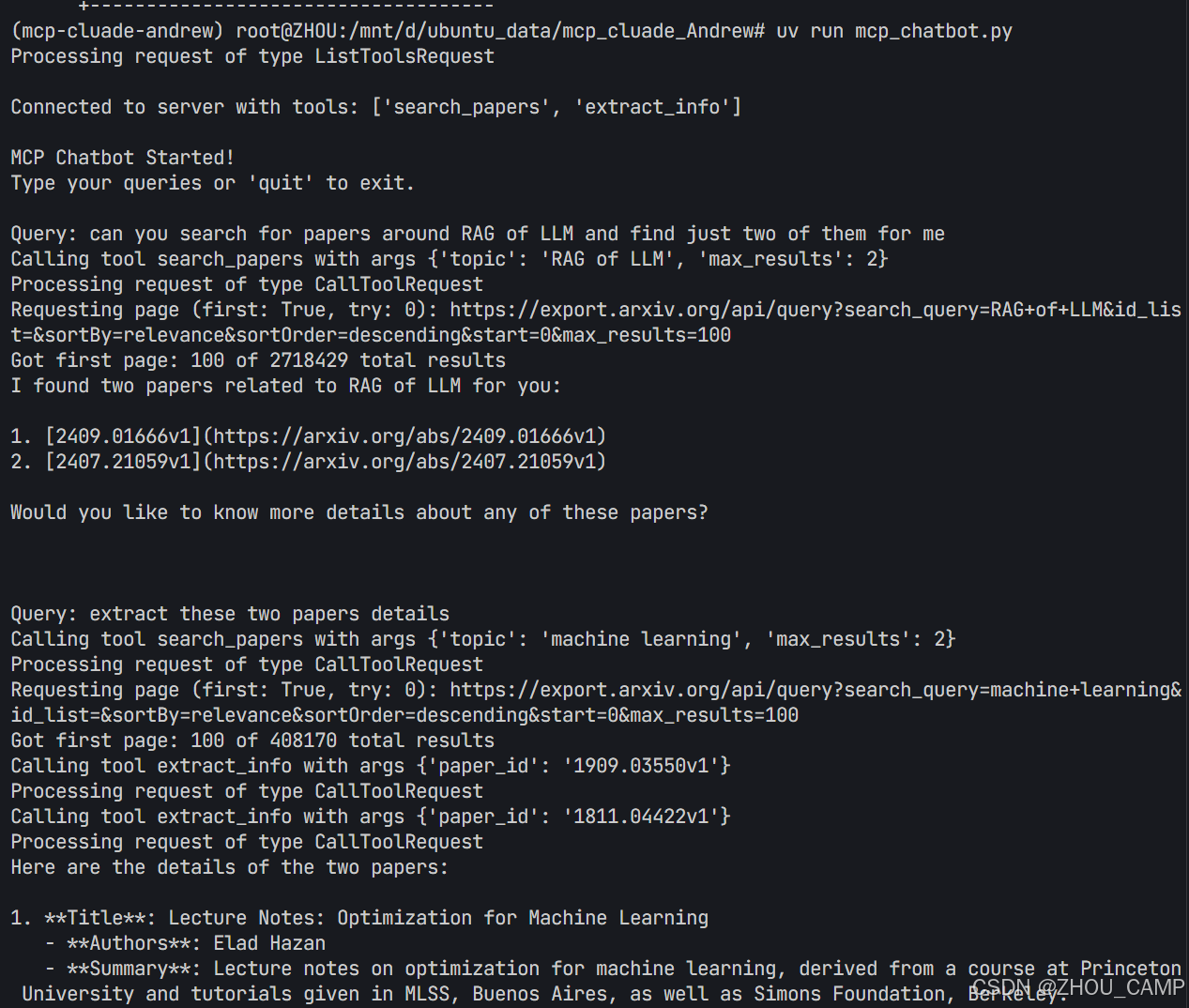
吴恩达MCP课程(3):mcp_chatbot
原课程代码是用Anthropic写的,下面代码是用OpenAI改写的,模型则用阿里巴巴的模型做测试 .env 文件为: OPENAI_API_KEYsk-xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx OPENAI_API_BASEhttps://dashscope.aliyuncs.com/compatible-mode…...

MySQL访问控制与账号管理:原理、技术与最佳实践
MySQL的安全体系建立在精细的访问控制和账号管理机制上。本文基于MySQL 9.3官方文档,深入解析其核心原理、关键技术、实用技巧和行业最佳实践。 一、访问控制核心原理:双重验证机制 连接验证 (Connection Verification) 客户端发起连接时,MyS…...

AWS 创建VPC 并且添加权限控制
AWS 创建VPC 并且添加权限控制 以下是完整的从0到1在AWS中创建VPC并配置权限的步骤(包含网络配置、安全组权限和实例访问): 1. 创建VPC 步骤: 登录AWS控制台 访问 AWS VPC控制台,点击 创建VPC。 配置基础信息 名称…...

langchain学习 01
dotenv库:可以从.env文件中加载配置信息。 from dotenv import load_dotenv # 加载函数,之后调用这个函数,即可获取配置环境.env里面的内容: deep_seek_api_key<api_key>getpass库:从终端输入password性质的内…...
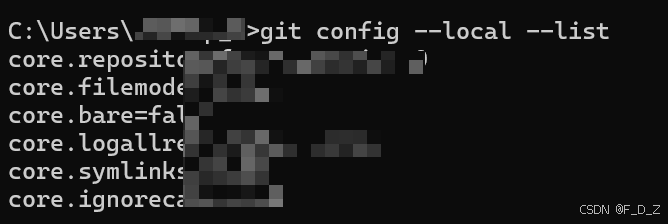
【清晰教程】查看和修改Git配置情况
目录 查看安装版本 查看特定配置 查看全局配置 查看本地仓库配置 设置或修改配置 查看安装版本 打开命令行工具,通过version命令检查Git版本号。 git --version 如果显示出 Git 的版本号,说明 Git 已经成功安装。 查看特定配置 如果想要查看特定…...

JAVA 常用 API 正则表达式
1 正则表达式作用 作用一:校验字符串是否满足规则作用二:在一段文本中查找满足要求的内容 2 正则表达式规则 2.1 字符类 package com.bjpowernode.test14;public class RegexDemo1 {public static void main(String[] args) {//public boolean matche…...

光电设计大赛智能车激光对抗方案分享:低成本高效备赛攻略
一、赛题核心难点与备赛痛点解析 全国大学生光电设计竞赛的 “智能车激光对抗” 赛题,要求参赛队伍设计具备激光对抗功能的智能小车,需实现光电避障、目标识别、轨迹规划及激光精准打击等核心功能。从历年参赛情况看,选手普遍面临三大挑战&a…...
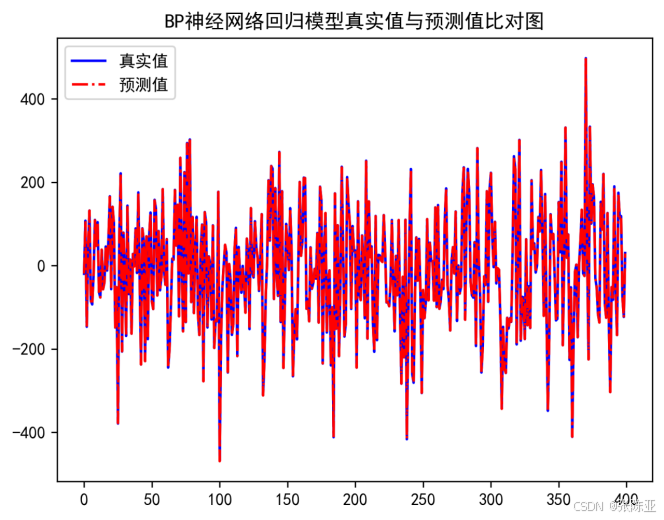
Python实现P-PSO优化算法优化BP神经网络回归模型项目实战
说明:这是一个机器学习实战项目(附带数据代码文档),如需数据代码文档可以直接到文章最后关注获取。 1.项目背景 在当今数据驱动的时代,回归分析作为预测和建模的重要工具,在科学研究和工业应用中占据着重要…...
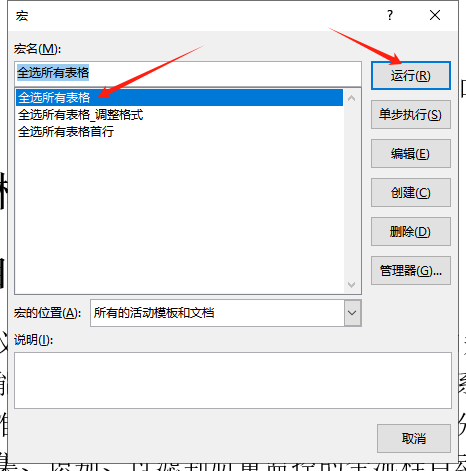
Microsoft的在word中选择文档中的所有表格进行字体和格式的调整时的解决方案
找到宏 创建 并粘贴 使用 Sub 全选所有表格() Dim t As Table an MsgBox("即将选择选区内所有表格,若无选区,则选择全文表格。", vbYesNo, "reboot提醒您!") If an - 6 Then Exit Sub Set rg IIf(Selection.Type wdSelectionIP, …...

C++23:关键特性与最新进展深度解析
文章目录 范围的新功能与增强元组的优化与新特性字符与字符串的转义表示优化std::thread::id的改进与扩展栈踪迹的格式化支持结论 C23作为C标准的最新版本,带来了许多令人瞩目的改进和新特性。从新的范围和元组功能到对字符和字符串转义表示的优化,再到 …...

Rust并发编程实践指南
Rust并发编程实践指南 一、Rust并发编程哲学 mindmaproot((Rust并发))Ownership System▶ 移动语义▶ 借用规则Type Safety▶ Send Trait▶ Sync TraitZero-Cost Abstraction▶ 无运行时开销▶ 编译期检查Fearless Concurrency▶ 数据竞争预防▶ 死锁检测工具二、核心并发模型…...

Kubernetes资源申请沾满但是实际的资源占用并不多,是怎么回事?
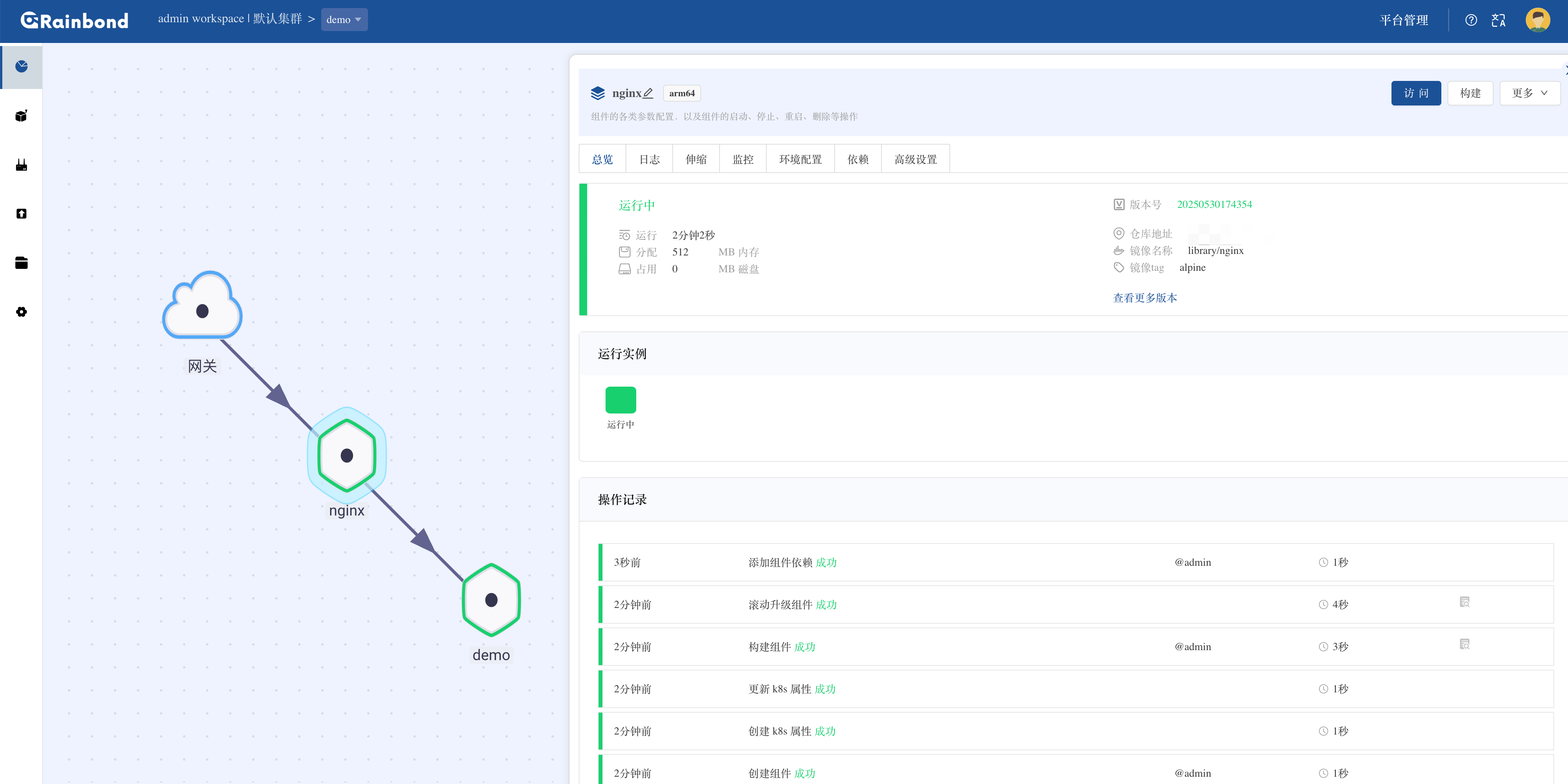
Kubernetes资源申请沾满但是实际的资源占用并不多是Kubernetes资源管理中的一个常见误解。 K8s资源管理机制 资源请求(Requests) vs 实际使用量 从你的截图可以看到: K8s节点资源状态(第一张图): CPU请求量:13795…...
鲲鹏Arm+麒麟V10 K8s 离线部署教程
针对鲲鹏 CPU 麒麟 V10 的离线环境,手把手教你从环境准备到应用上线,所有依赖包提前打包好,步骤写成傻瓜式操作指南。 一、环境规划# 准备至少两台机器。 架构OS作用Arm64任意,Mac 也可以下载离线包Arm64麒麟 V10单机部署 K8s…...

PGSQL结合linux cron定期执行vacuum_full_analyze命令
VACUUM FULL ANALYZE 详解 一、核心功能 空间回收与重组 完全重写表数据文件,将碎片化的存储空间合并并返还操作系统(普通 VACUUM 仅标记空间可重用)。彻底清理死元组(已删除或更新的旧数据行),解…...

php 中使用MQTT
MQTT 是一种基于发布/订阅模式的 轻量级物联网消息传输协议 ,可以用极少的代码和带宽为联网设备提供实时可靠的消息服务,它广泛应用于物联网、移动互联网、智能硬件、车联网、电力能源等行业。 本文主要介绍如何在 PHP项目中使用composer require php-m…...
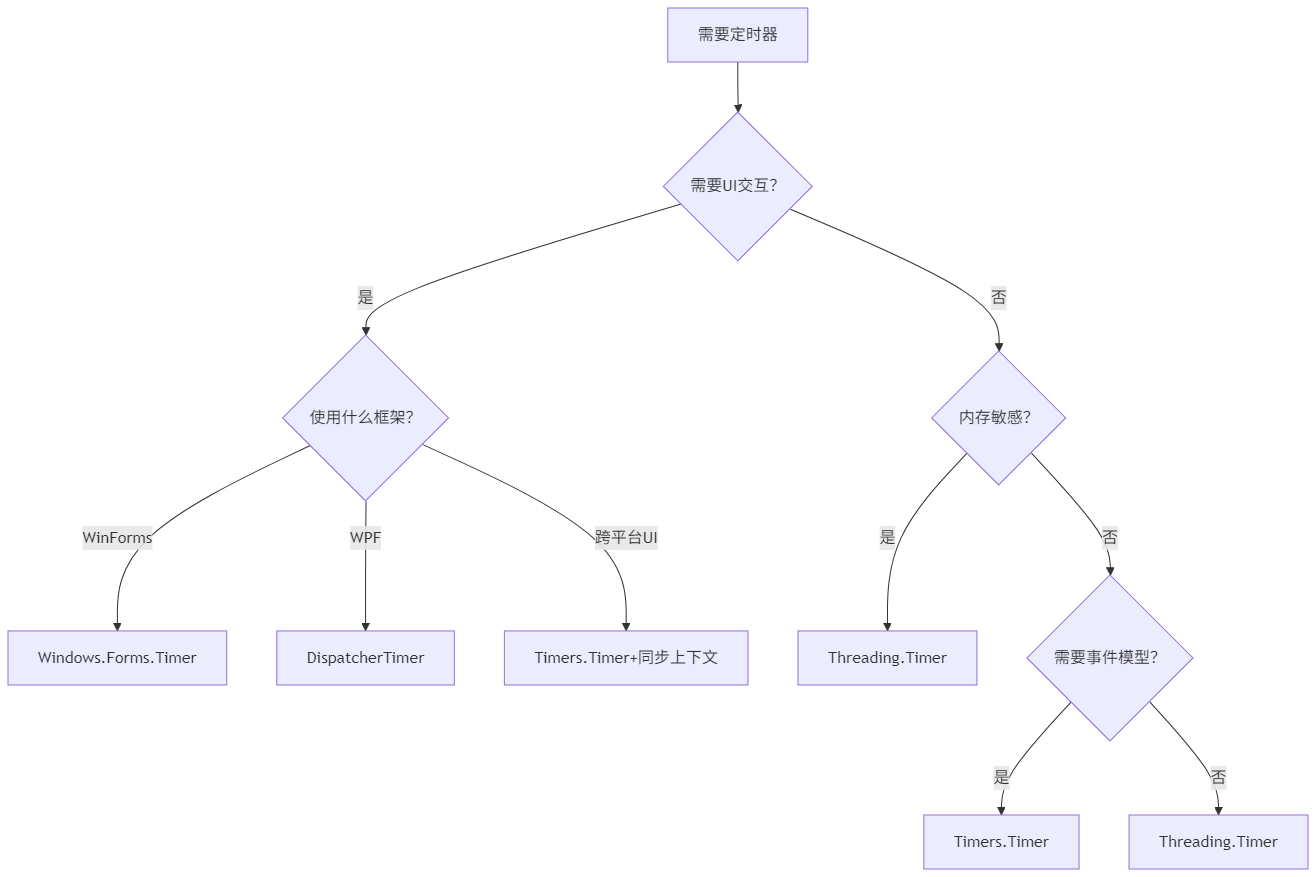
C#定时器深度对比:System.Timers.Timer vs System.Threading.Timer性能实测与选型指南
本文通过真实基准测试揭秘两种常用定时器的性能差异,助你做出最佳选择 一、C#定时器全景概览 在C#生态中,不同定时器适用于不同场景。以下是主流定时器的核心特性对比: 定时器类型命名空间适用场景触发线程精度内存开销依赖框架System.Wind…...

go的select多路复用
传统的方法在遍历管道时,如果不关闭会阻塞而导致 deadlock ,在实际开发中,可能我们不好确定什么关闭该管道。使用select来获取channel里面的数据的时候不需要关闭channel 你也许会写出如下代码使用遍历的方式来实现: for { //…...

深度理解与剖析:前端声明式组件系统
好的,我将根据您的要求,首先进行深度理解与多维思考,然后形成一个全面且有深度的综合性总结,其中包含针对初学者的简洁解释。 1. 核心概念解析:声明式与命令式编程 在深入理解前端的声明式组件系统之前,我…...
解决8080端口被占问题
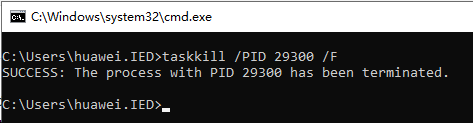
文章目录 1. 提出问题2. 解决问题2.1 查看占用8080端口的进程2.2 杀死占用8080端口的进程2.3 测试问题是否已解决3. 实战小结1. 提出问题 运行Spring Boot项目,报错8080端口被占 2. 解决问题 2.1 查看占用8080端口的进程 执行命令:netstat -ano | findstr :8080 2.2 杀死占用…...
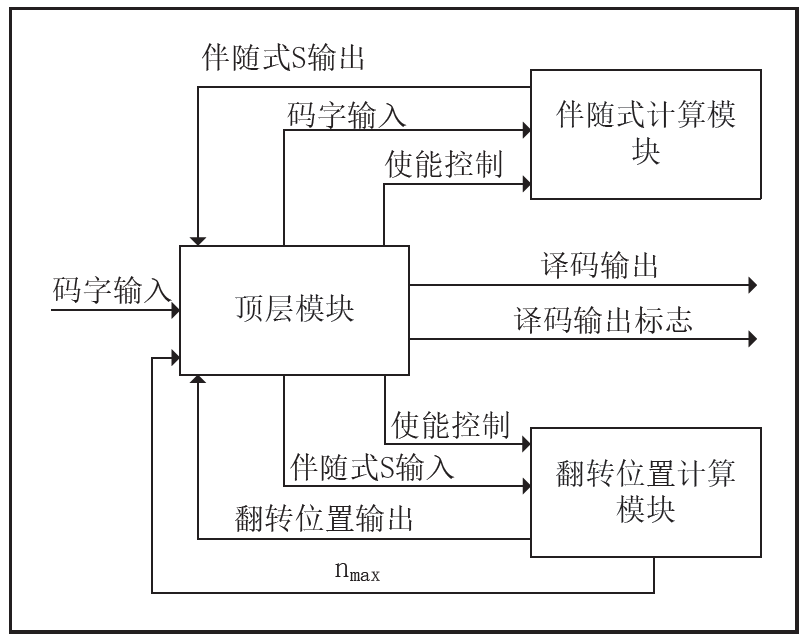
介绍一种LDPC码译码器
介绍比特翻转译码原理以及LDPC码译码器的设计。 1 译码理论 比特翻转(BF)译码算法是硬判决算法的一种。 主要译码思想是:当有一个校验矩阵出错时,BF 算法认为在这个校验矩阵中一定至少存在一个位置的码字信息是错误的࿱…...