OpenCv高阶(十八)——dlib人脸检测与识别
文章目录
- 一、dlib库是什么?
- 二、opencv库与dlib库的优缺点对比
- 1、opencv优缺点
- 2、dlib库优缺点
- 三、dlib库的安装
- 1、在线安装
- 2、本地安装
- 四、dlib库的人脸检测器
- 1. 基于 HOG 的检测器
- 2. 基于 CNN 的检测器
- 五、dlib人脸检测的简单使用
- 1、导入必要库
- 2、初始化人脸检测器
- 3、读取图像文件
- 4、执行人脸检测
- 5、 遍历检测结果并标注
- 6、显示检测结果
- 总结
一、dlib库是什么?
dlib是一个适用于C++和Python的第三方库。包含机器学习、计算机视觉和图像处理的工具包,被广泛的应用于机器人、嵌入式设备、移动电话和大型高性能计算环境。是开源许可用户免费使用。
二、opencv库与dlib库的优缺点对比
1、opencv优缺点
优点
1)可以在CPU上实时工作;
2)简单的架构;
3)可以检测不同比例的人脸。
缺点
1)会出现大量的把非人脸预测为人脸的情况;
2)不适用于非正面人脸图像;
3)不抗遮挡。
2、dlib库优缺点
优点
1)适用于正面和略微非正面的人脸;
2)语法极简单
3)再小的遮挡下仍可工作。
缺点
1)不能检测小脸,因为它训练数据的最小人脸尺寸为80×80,较小尺寸的人脸数据需自己训练检测器;
2)边界框通常排除前额的一部分甚至下巴的一部分;
3)不适用于侧面和极端非正面,如俯视或仰视。
三、dlib库的安装
1、在线安装
pip install dlib –i 镜像地址
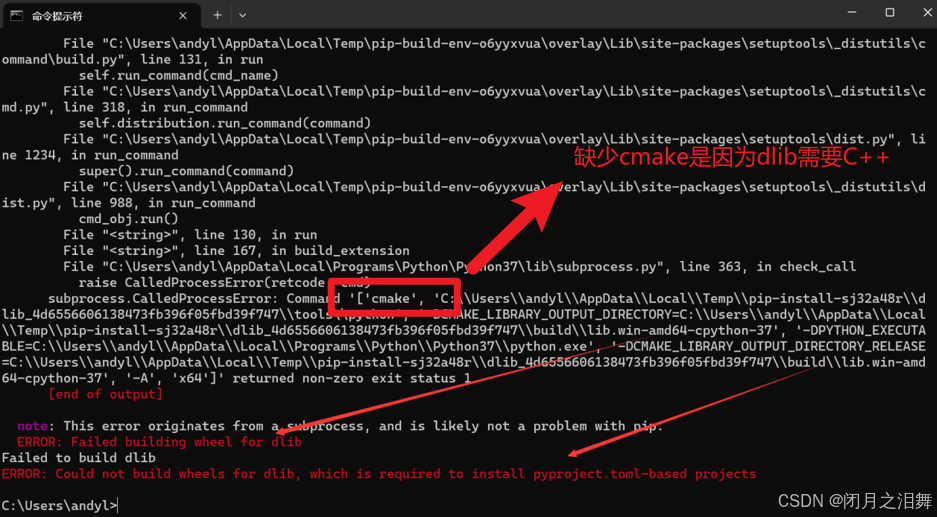
dlib官网:https://dlib.net/compile.html

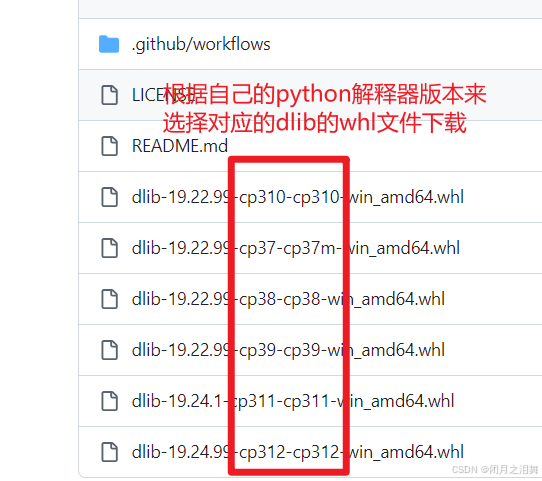
2、本地安装
找到dlib库的whl文件进行安装,将whl文件下载到本地安装。
dlib资源: https://github.com/z-mahmud22/Dlib_Windows_Python3.x
四、dlib库的人脸检测器
dlib 提供 两种主流人脸检测器,适用于不同场景:
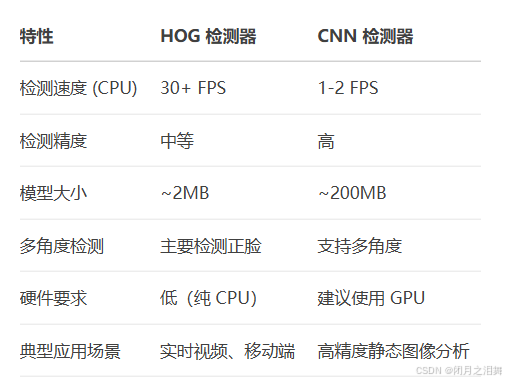
1. 基于 HOG 的检测器
detector = dlib.get_frontal_face_detector() # 默认使用此方法
算法原理:
使用 方向梯度直方图 (HOG) 特征描述图像局部区域的梯度方向分布
结合 线性分类器 (SVM) 进行人脸判别
通过 图像金字塔 和 滑动窗口 实现多尺度检测
特点:
✅ 速度快:适合实时检测(CPU 上可达 30+ FPS)
✅ 轻量级:模型文件小(约 2MB)
⚠️ 局限性:对侧脸、遮挡人脸检测效果较差
2. 基于 CNN 的检测器
cnn_detector = dlib.cnn_face_detection_model_v1("mmod_human_face_detector.dat")
算法原理:
使用 卷积神经网络 (CNN) 进行端到端的人脸检测
需要预训练权重文件(需单独下载)
特点:
✅ 高精度:对侧脸、部分遮挡、复杂背景鲁棒性强
⚠️ 资源消耗大:需要 GPU 加速(CPU 上较慢)
⚠️ 模型文件较大(约 200MB)
五、dlib人脸检测的简单使用
1、导入必要库
import cv2 # OpenCV库,用于图像处理和显示
import dlib # 机器学习库,用于人脸特征检测2、初始化人脸检测器
# 使用dlib内置的基于HOG特征的方向梯度直方图人脸检测器
# 该检测器对正脸检测效果较好,返回人脸矩形坐标
detector = dlib.get_frontal_face_detector()
3、读取图像文件
# 从指定路径加载图像文件,OpenCV默认读取为BGR格式
img = cv2.imread("../data/pd.png") 4、执行人脸检测
# 参数说明:
# 1. 输入图像(img)
# 2. 图像放大系数(4):通过上采样图像4次来检测更小的人脸
# 返回值:dlib.rectangle对象组成的可迭代对象,包含人脸区域坐标
faces = detector(img, 4) 5、 遍历检测结果并标注
for face in faces:# 解析人脸矩形坐标:x1 = face.left() # 人脸框左侧x坐标y1 = face.top() # 人脸框顶部y坐标x2 = face.right() # 人脸框右侧x坐标y2 = face.bottom() # 人脸框底部y坐标# 在图像上绘制绿色矩形框标注人脸# 参数说明:# 1. 目标图像# 2. 左上角坐标 (x1, y1)# 3. 右下角坐标 (x2, y2)# 4. 颜色 (BGR格式,此处为绿色)# 5. 线宽(2像素)cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
6、显示检测结果
cv2.imshow('Face Detection Result', img) # 创建显示窗口
cv2.waitKey(0) # 等待任意按键(0表示无限等待)
cv2.destroyAllWindows() # 关闭所有OpenCV窗口

总结
Dlib的人脸检测技术通过提供双引擎解决方案,在计算机视觉领域展现了独特的平衡艺术:其HOG检测器以轻量高效的特性(2MB模型、30+ FPS实时性)成为移动端和实时视频的首选,而CNN检测器凭借深度学习带来的高精度(支持多角度、复杂光照),在静态图像分析中树立了行业标杆。这种“鱼与熊掌兼得”的设计哲学,既解决了传统方法对硬件依赖的桎梏(HOG纯CPU运行),又通过模块化架构实现了从基础检测到人脸识别、姿态分析的生态延伸,堪称轻量级框架中兼顾速度与精度的典范。
相关文章:
OpenCv高阶(十八)——dlib人脸检测与识别
文章目录 一、dlib库是什么?二、opencv库与dlib库的优缺点对比1、opencv优缺点2、dlib库优缺点 三、dlib库的安装1、在线安装2、本地安装 四、dlib库的人脸检测器1. 基于 HOG 的检测器2. 基于 CNN 的检测器 五、dlib人脸检测的简单使用1、导入必要库2、初始化人脸检…...

中山大学无人机具身导航新突破!FlightGPT:迈向通用性和可解释性的无人机视觉语言导航
作者:Hengxing Cai 1 , 2 ^{1,2} 1,2, Jinhan Dong 2 , 3 ^{2,3} 2,3, Jingjun Tan 1 ^{1} 1, Jingcheng Deng 4 ^{4} 4, Sihang Li 2 ^{2} 2, Zhifeng Gao 2 ^{2} 2, Haidong Wang 1 ^{1} 1, Zicheng Su 5 ^{5} 5, Agachai Sumalee 6 ^{6} 6, Renxin Zhong 1 ^{1} …...
WIN11+CUDA11.8+VS2019配置BundleFusion
参考: BundleFusion:VS2019 2017 ,CUDA11.5,win11,Realsense D435i离线数据包跑通,环境搭建 - 知乎 Win10VS2017CUDA10.1环境下配置BundleFusion - 知乎 BundleFusionWIN11VS2019 CUDA11.7环境配置-CSDN博客 我的环境:Win 11…...
WPF prism
Prism Prism.Dryloc 包 安装 Nuget 包 - Prism.DryIoc 1. 修改 App.xaml 修改 App.xaml 文件,添加 prism 命名空间, 继承由 Application → PrismApplication,删除默认启动 url, StartupUri“MainWindow.xaml” <dryioc:PrismApplicationx:Class…...

实时同步缓存,与阶段性同步缓存——补充理解《补充》
根据 Redis 缓存的数据与 DBMS 中数据的同步性划分,缓存一般可划分为两类:实时同步缓存,与阶段性同步缓存。 实时同步缓存是指,DBMS 中数据更新后,Redis 缓存中的存放的相关数据会被立即清 除,以促使再有对…...

[Redis] Redis:高性能内存数据库与分布式架构设计
标题:[Redis] 浅谈分布式系统 水墨不写bug 文章目录 一、什么是Redis?一、核心定位二、核心优势三、典型应用场景四、Redis vs 传统数据库 二、架构选择与设计1、单机架构(应用程序 数据库服务器)2、应用程序和数据库服务器分离3…...

Mobaxterm解锁Docker
Mobaxterm是一款功能强大的终端模拟器和SSH客户端,它支持Windows、Linux和Mac操作系统,对于使用Docker的开发者和运维人员来说,Mobaxterm是一个非常有用的工具。本文将深入解析Mobaxterm,并分享一些使用Docker时的高效技巧。 Mob…...
React 第四十九节 Router中useNavigation的具体使用详解及注意事项
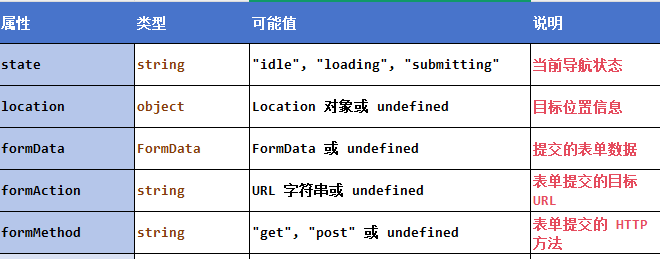
前言 useNavigation 是 React Router 中一个强大的钩子,用于获取当前页面导航的状态信息。 它可以帮助开发者根据导航状态优化用户体验,如显示加载指示器、防止重复提交等。 一、useNavigation核心用途 检测导航状态:判断当前是否正在进行…...
【JavaEE】Spring事务
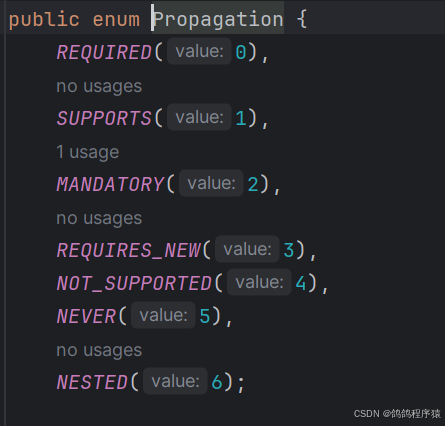
目录 一、事务简介二、Spring事务的实现2.1 事务的操作2.2 分类2.2.1 Spring编程式事务2.2.2 Spring 声明式事务 Transactional2.2.2.1 Transactional 详解2.2.2.1.1 rollbackFor2.2.2.1.2 Isolation2.2.2.1.3 propagation 一、事务简介 事务:事务是⼀组操作的集合…...

Flink 状态管理深度解析:类型与后端的全面探索
在流处理场景中,数据往往是连续且无界的,为了准确处理这些数据并维持计算的连续性,Flink 引入了状态管理机制。Flink 的状态管理包含状态类型和状态后端两大部分,它们相辅相成,共同为作业的可靠性、容错性和性能提供保障。接下来,我们将深入探究 Flink 状态管理中状态类型…...
Android15 userdebug版本不能remount
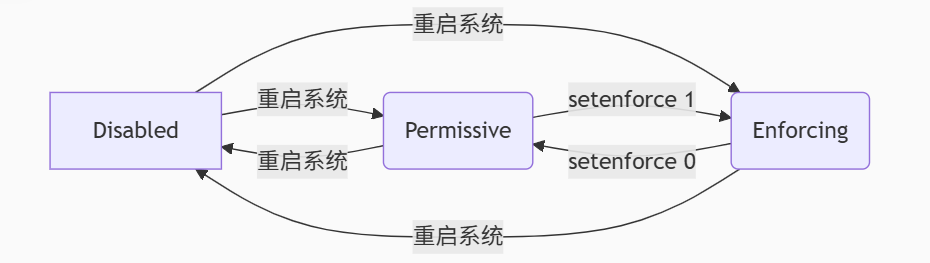
背景描述: 最近调试Android Vendor Hal的时候发现一个奇怪的现象: android userdebug版本刷到设备中,执行adb root没提示错误,但是没有获取到root权限。 Android设备运行的系统版本有三种情况:user版本、userdebug版本和eng版本…...
R包安装报错解决案例系列|R包使用及ARM架构解决data.table安装错误问题
有不少同学是Mac系统的,分析过程中会发现部分R包总是安装不成功,这是因为部分R包基于windowsx86架构编译的,最常见的就是含 C/C/Fortran 的包,对于初学者都是建议linux和win去做,Windows 通常直接安装预编译好的二进制…...

k8s Headless Service
Kubernetes 无头服务(Headless Service)配置与使用场景 1.无头服务概述 无头服务(Headless Service)是 Kubernetes 中的一种特殊服务类型,它**不分配集群 IP(ClusterIP),而是直接暴露…...
Linux上安装MongoDB
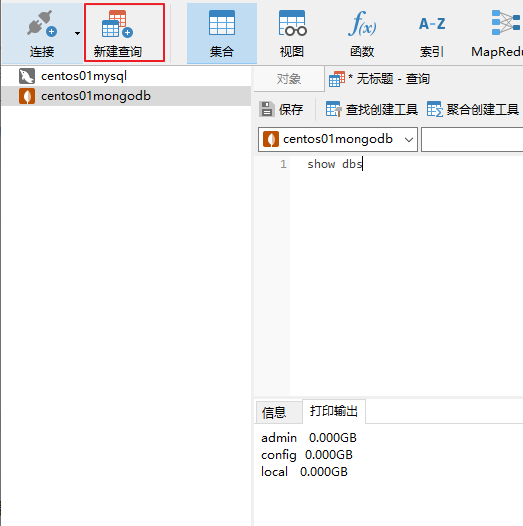
目录 一、在Linux系统安装MongoDB服务器 1、下载MongoDB 2、上传MongoDB并解压 3、创建必要目录 4、配置环境变量 5、创建配置文件 6、启动命令 7、验证安装 二、在Linux系统安装MongoDB客户端Shell 1、下载MongoDB Shell 2、上传MongoDB Shell并解压 3、配置环境变…...

Redis最佳实践——安全与稳定性保障之访问控制详解
Redis 在电商应用的安全与稳定性保障之访问控制全面详解 一、安全访问控制体系架构 1. 多层级防护体系 #mermaid-svg-jpkDj2nKxCq9AXIW {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-jpkDj2nKxCq9AXIW .error-ico…...
【华为开发者空间 x DeepSeek】服务器运行Ollama并在本地调用
文章概述 本文介绍了如何在 华为开发者空间 中快速部署并使用 Ollama 模型运行框架,并结合 deepseek-r1 模型进行本地或远程交互推理。内容涵盖环境准备、模型配置、网卡绑定、内网穿透、API调用等多个环节,适合希望在华为云上快速搭建本地类大模型推理…...

Halcon
regiongrowing — Segment an image using regiongrowing. get_obj_class:获取图像的类别名 get_region_points:获取区域的像素 get_contour_xld:获取xld像素点坐标 get_polygon_xld:获取多边形的数据 get_region_polygon:计算一个区域的…...
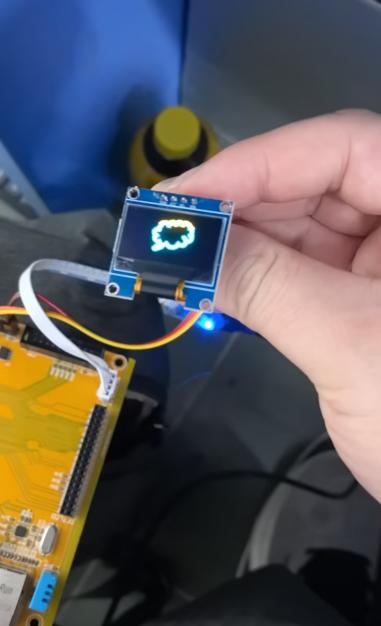
STM32之IIC(重点)和OLED屏
内部集成电路概述 基本概念 内部集成电路(Inter Integrated Circuit)的简称叫做IIC或者I2C,是一种简单的、半双工同步通信的串行通信接口,IIC总线是上世纪80年代(1982年)由飞利浦公司设计出来,…...
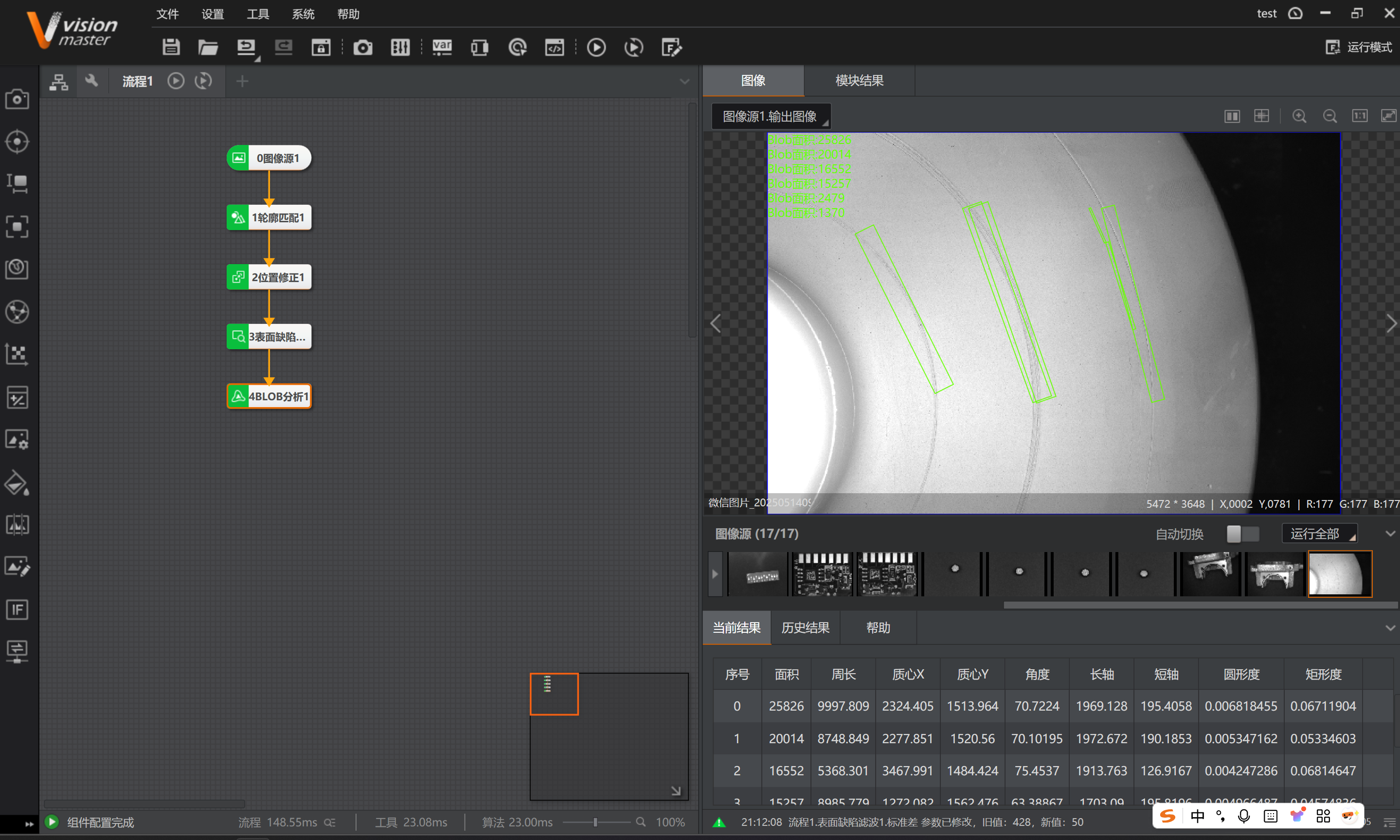
学习海康VisionMaster之表面缺陷滤波
一:进一步学习了 今天学习下VisionMaster中的表面缺陷滤波:简单、无纹理背景的表面缺陷检测,可以检测表面的异物,缺陷,划伤等 二:开始学习 1:什么表面缺陷滤波? 表面缺陷滤波的核心…...

游戏引擎学习第314天:将精灵拆分成多个层
回顾并为今天的工作做准备 我们今天继续昨天开始的工作,现在我们要回到渲染中处理 Z 值的最终环节。我们目前已经有一个我们认为还算合理的排序方式,虽然可能还需要在接下来的过程中进行一些调整,但总体上已经有了一个明确的方向。 我们已经…...
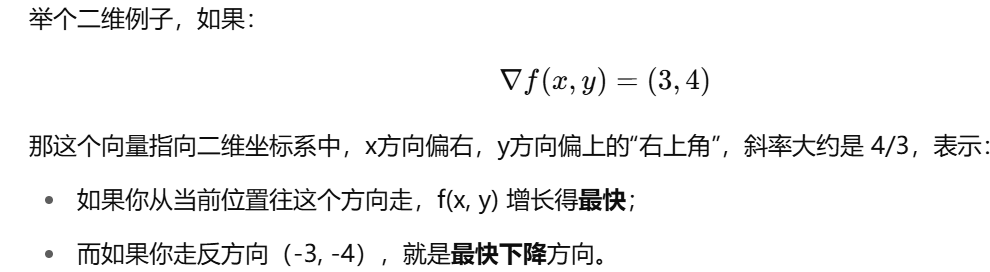
【学习笔记】深度学习-梯度概念
一、定义 梯度向量不仅表示函数变化的速度,还表示函数增长最快的方向 二、【问】为什么说它表示方向? 三、【问】那在深度学习梯度下降的时候,还要判断梯度是正是负来更新参数吗? 假设某个参数是 w,损失函数对它的…...
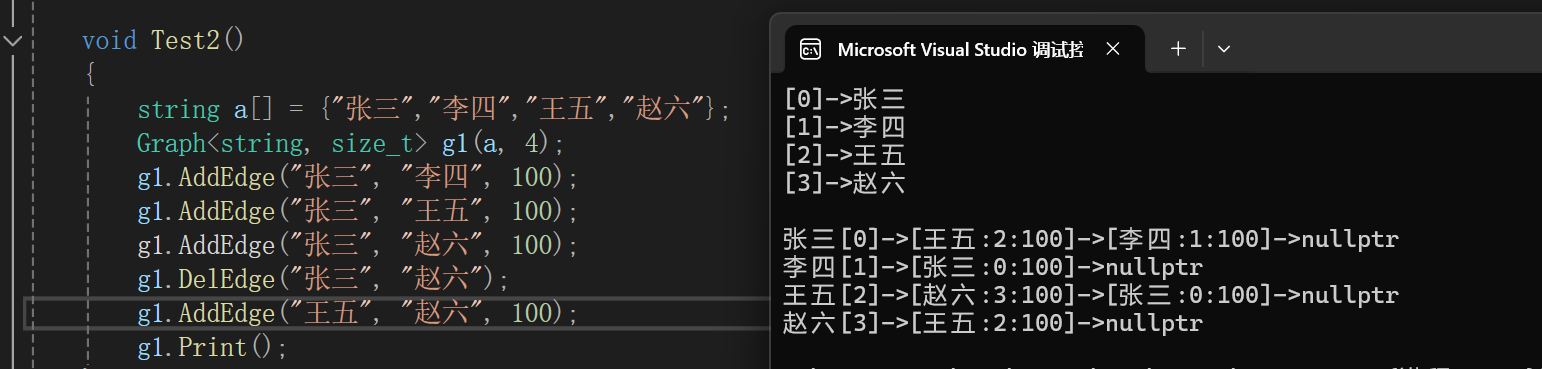
【数据结构】图的存储(邻接矩阵与邻接表)
图的存储结构 因为图中既有节点,又有边(节点与节点之间的关系),因此,在图的存储中,只需要保存:节点和边关系即可。 节点保存比较简单,只需要一段连续空间即可,那边关系该怎么保存呢࿱…...
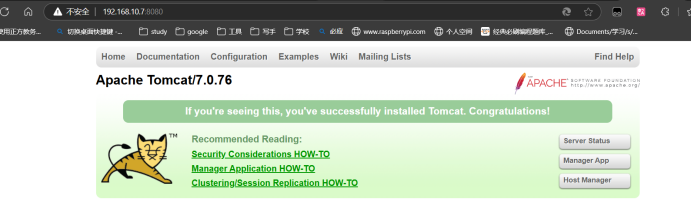
tomcat yum安装
使用yum安装 yum install -y java-1.7.0-openjdk* tomcat* --disablerepoepel## java-1.7.0-openjdk* 注意:最终安装的是java-1.8.0版本## --disablerepoepel 禁用:EPEL源,防止版本冲突 java -version (2) 启停:Tomcat 7 s…...

【Elasticsearch】suggest_mode
suggest_mode 是 Elasticsearch 中 term suggester 和 phrase suggester 的一个参数,用于控制建议的生成方式。它有以下三种模式: 1. missing:默认值。仅对索引中不存在的词项提供建议。如果输入的词已经在索引中存在,则不会生成建…...
-golang SQLx 实现代码(动态组织 SQL))
数据库只更新特定字段的两种方式(先读后写 vs. 动态组织 SQL)-golang SQLx 实现代码(动态组织 SQL)
文章目录 数据库只更新特定字段的两种方式(先读后写 vs. 动态组织 SQL)go语言例子使用GORM的示例(最常用的Go ORM库)使用SQLx的两种更新方式实现golang SQLx 实现代码(动态组织 SQL) 数据库只更新特定字段的…...
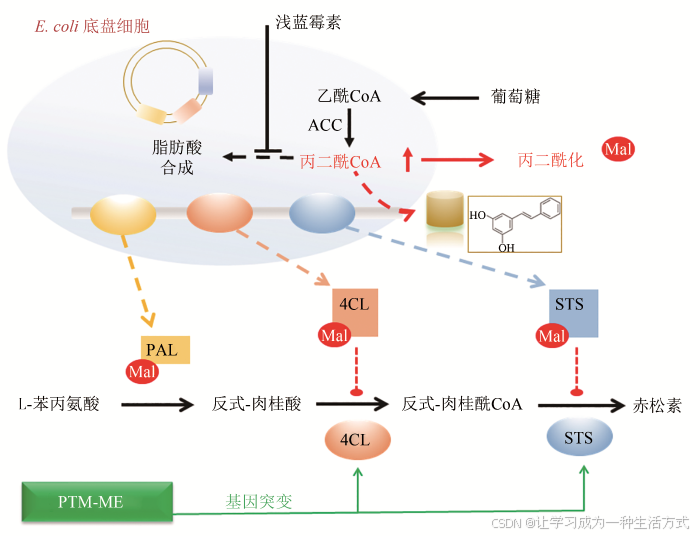
从翻译后修饰角度解析人工合成途径与底盘细胞的适配性-文献精读136
Compatibility between synthetic pathway and chassis cells from the viewpoint of post-translational modifications 从翻译后修饰角度解析人工合成途径与底盘细胞的适配性 摘要 揭示工程化设计的人工合成途径与底盘细胞整体代谢网络的交互作用及适配性机制是合成生物学研…...
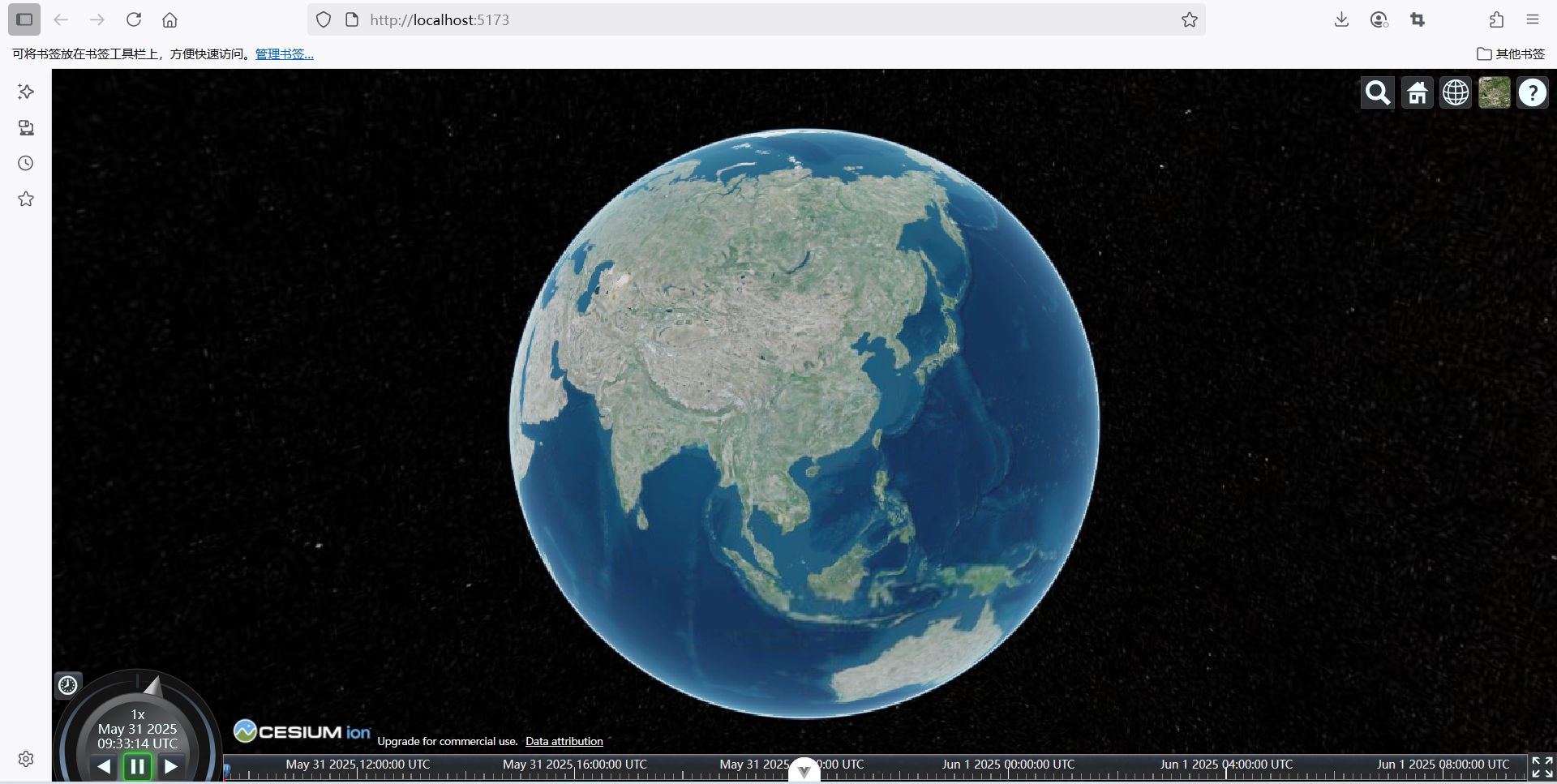
Cesium快速入门到精通系列教程一
一、打造第一个Cesium应用 1、官方渠道下载Cesium(可选择历史版本) GitHub Releases页面 访问 Cesium GitHub Releases,此处列出了所有正式发布的版本。 通过标签(如 v1.95.0)选择目标版本,下载…...
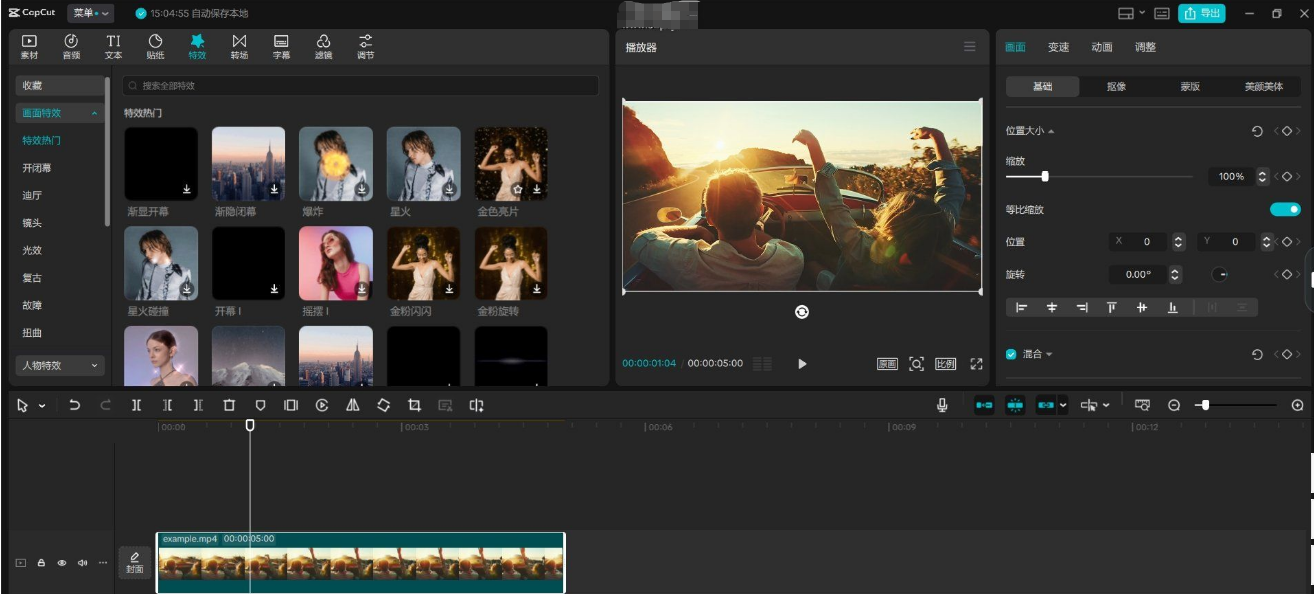
[Windows] 剪映 视频编辑处理
附链接:夸克网盘分享(点击蓝色字体自行保存下载)...
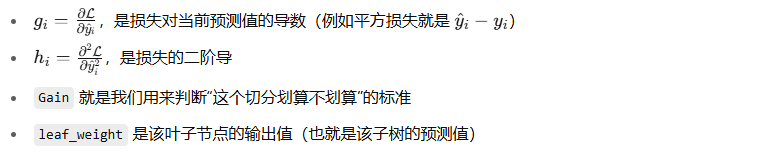
决策树 GBDT XGBoost LightGBM
一、决策树 1. 决策树有一个很强的假设: 信息是可分的,否则无法进行特征分支 2. 决策树的种类: 2. ID3决策树: ID3决策树的数划分标准是信息增益: 信息增益衡量的是通过某个特征进行数据划分前后熵的变化量。但是&…...
stm32 / arduino TPL0401A使用教程
这是在给英国的一个学生讲课时用到的一个芯片,做一个dcdc的反馈电路,刚开始用的不是这个,后来发现国内这个芯片用的挺成熟,就选择了这个。 芯片说明 首先我买的是TPL0401A,我发现淘宝上卖的都是A,其实想用C࿰…...