第四十一天打卡
简单CNN
知识回顾
数据增强
卷积神经网络定义的写法
batch归一化:调整一个批次的分布,常用与图像数据
特征图:只有卷积操作输出的才叫特征图
调度器:直接修改基础学习率
卷积操作常见流程如下:
1. 输入 → 卷积层 → Batch归一化层(可选) → 池化层 → 激活函数 → 下一层
Flatten -> Dense (with Dropout,可选) -> Dense (Output)
简单 CNN
1. 数据增强
数据增强就像是在餐厅的食材上应用各种处理方法,以增加菜品的多样性和丰富性。例如,可以通过旋转、翻转、裁剪等方法来扩充食材的种类和形态,使模型在训练过程中看到更多的“菜品”变化,从而提高模型的泛化能力。
2. 卷积神经网络定义的写法
卷积神经网络(CNN)的定义就像是餐厅的高级菜谱,其中包含了多种复杂的烹饪步骤和技巧。CNN 通过卷积层、池化层、激活函数等组件来提取图像的特征,从而实现对图像的分类或识别。
3. Batch 归一化
Batch 归一化就像是在厨房中对食材进行标准化处理,确保每一批次的食材在烹饪前都有相同的均值和方差。这有助于加快模型的训练速度,并提高模型的稳定性。
4. 特征图
特征图就像是厨师在烹饪过程中创建的中间产物,这些中间产物包含了食材经过初步处理后的信息。在 CNN 中,特征图是由卷积层生成的,它们捕捉了图像的不同特征,如边缘、纹理等。
5. 调度器
调度器就像是餐厅的经理,根据餐厅的运营情况(如顾客流量、食材供应等)动态调整厨师的工作强度和节奏。在训练模型时,调度器会根据训练进度动态调整学习率,以加快收敛速度并提高模型性能。
6. 卷积操作常见流程
卷积操作的常见流程可以比喻为餐厅制作一道复杂菜品的步骤:
输入:就像厨师接到顾客的订单,开始准备食材。
卷积层:厨师对食材进行初步处理,如切割、搅拌等,提取出食材的基本特征。
Batch 归一化层(可选):厨师对处理后的食材进行标准化,确保每一批次的食材质量一致。
池化层:厨师对食材进行进一步处理,如浓缩、提纯等,减少数据量并突出重要特征。
激活函数:厨师根据菜谱添加特定的调料,使菜品具有独特的风味,激活函数为模型引入非线性。
下一层:处理后的食材传递给下一位厨师,进行下一步烹饪。
7. Flatten -> Dense (with Dropout,可选) -> Dense (Output)
Flatten:将多维的特征图展平成一维向量,类似于将复杂菜品的所有成分混合在一起,形成一个统一的混合物。
Dense (with Dropout):对混合物进行进一步加工,添加 Dropout 就像是在烹饪过程中随机丢弃一些成分,以防止过度依赖某些特定成分(防止过拟合)。
Dense (Output):最终输出菜品,类似于将所有成分组合成一个完整的菜品,呈现给顾客。
作业:尝试手动修改下不同的调度器和CNN的结构,观察训练的差异。
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 1. 数据预处理
# 训练集:使用多种数据增强方法提高模型泛化能力
train_transform = transforms.Compose([# 随机裁剪图像,从原图中随机截取32x32大小的区域transforms.RandomCrop(32, padding=4),# 随机水平翻转图像(概率0.5)transforms.RandomHorizontalFlip(),# 随机颜色抖动:亮度、对比度、饱和度和色调随机变化transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),# 随机旋转图像(最大角度15度)transforms.RandomRotation(15),# 将PIL图像或numpy数组转换为张量transforms.ToTensor(),# 标准化处理:每个通道的均值和标准差,使数据分布更合理transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 测试集:仅进行必要的标准化,保持数据原始特性,标准化不损失数据信息,可还原
test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=train_transform # 使用增强后的预处理
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=test_transform # 测试集不使用增强
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 4. 定义CNN模型的定义(替代原MLP)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # 继承父类初始化# ---------------------- 第一个卷积块 ----------------------# 卷积层1:输入3通道(RGB),输出32个特征图,卷积核3x3,边缘填充1像素self.conv1 = nn.Conv2d(in_channels=3, # 输入通道数(图像的RGB通道)out_channels=32, # 输出通道数(生成32个新特征图)kernel_size=3, # 卷积核尺寸(3x3像素)padding=1 # 边缘填充1像素,保持输出尺寸与输入相同)# 批量归一化层:对32个输出通道进行归一化,加速训练self.bn1 = nn.BatchNorm2d(num_features=32)# ReLU激活函数:引入非线性,公式:max(0, x)self.relu1 = nn.ReLU()# 最大池化层:窗口2x2,步长2,特征图尺寸减半(32x32→16x16)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # stride默认等于kernel_size# ---------------------- 第二个卷积块 ----------------------# 卷积层2:输入32通道(来自conv1的输出),输出64通道self.conv2 = nn.Conv2d(in_channels=32, # 输入通道数(前一层的输出通道数)out_channels=64, # 输出通道数(特征图数量翻倍)kernel_size=3, # 卷积核尺寸不变padding=1 # 保持尺寸:16x16→16x16(卷积后)→8x8(池化后))self.bn2 = nn.BatchNorm2d(num_features=64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:16x16→8x8# ---------------------- 第三个卷积块 ----------------------# 卷积层3:输入64通道,输出128通道self.conv3 = nn.Conv2d(in_channels=64, # 输入通道数(前一层的输出通道数)out_channels=128, # 输出通道数(特征图数量再次翻倍)kernel_size=3,padding=1 # 保持尺寸:8x8→8x8(卷积后)→4x4(池化后))self.bn3 = nn.BatchNorm2d(num_features=128)self.relu3 = nn.ReLU() # 复用激活函数对象(节省内存)self.pool3 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:8x8→4x4# ---------------------- 全连接层(分类器) ----------------------# 计算展平后的特征维度:128通道 × 4x4尺寸 = 128×16=2048维self.fc1 = nn.Linear(in_features=128 * 4 * 4, # 输入维度(卷积层输出的特征数)out_features=512 # 输出维度(隐藏层神经元数))# Dropout层:训练时随机丢弃50%神经元,防止过拟合self.dropout = nn.Dropout(p=0.5)# 输出层:将512维特征映射到10个类别(CIFAR-10的类别数)self.fc2 = nn.Linear(in_features=512, out_features=10)def forward(self, x):# 输入尺寸:[batch_size, 3, 32, 32](batch_size=批量大小,3=通道数,32x32=图像尺寸)# ---------- 卷积块1处理 ----------x = self.conv1(x) # 卷积后尺寸:[batch_size, 32, 32, 32](padding=1保持尺寸)x = self.bn1(x) # 批量归一化,不改变尺寸x = self.relu1(x) # 激活函数,不改变尺寸x = self.pool1(x) # 池化后尺寸:[batch_size, 32, 16, 16](32→16是因为池化窗口2x2)# ---------- 卷积块2处理 ----------x = self.conv2(x) # 卷积后尺寸:[batch_size, 64, 16, 16](padding=1保持尺寸)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x) # 池化后尺寸:[batch_size, 64, 8, 8]# ---------- 卷积块3处理 ----------x = self.conv3(x) # 卷积后尺寸:[batch_size, 128, 8, 8](padding=1保持尺寸)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x) # 池化后尺寸:[batch_size, 128, 4, 4]# ---------- 展平与全连接层 ----------# 将多维特征图展平为一维向量:[batch_size, 128*4*4] = [batch_size, 2048]x = x.view(-1, 128 * 4 * 4) # -1自动计算批量维度,保持批量大小不变x = self.fc1(x) # 全连接层:2048→512,尺寸变为[batch_size, 512]x = self.relu3(x) # 激活函数(复用relu3,与卷积块3共用)x = self.dropout(x) # Dropout随机丢弃神经元,不改变尺寸x = self.fc2(x) # 全连接层:512→10,尺寸变为[batch_size, 10](未激活,直接输出logits)return x # 输出未经过Softmax的logits,适用于交叉熵损失函数# 初始化模型
model = CNN()
#model = model.to(device) # 将模型移至GPU(如果可用)
# 5. 定义损失函数和优化器
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数,适用于多分类任务
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器,学习率0.001
# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)
# scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=5, gamma=0.1)
# # 每5个epoch,LR = LR × 0.1 # scheduler = optim.lr_scheduler.MultiStepLR(optimizer, milestones=[10, 20, 30], gamma=0.5)
# # 当epoch=10、20、30时,LR = LR × 0.5 # scheduler = optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max=10, eta_min=0.0001)
# # LR在[0.0001, LR_initial]之间按余弦曲线变化,周期为2×T_max
# 5. 训练模型(记录每个 iteration 的损失)
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train() # 设置为训练模式# 记录每个 iteration 的损失all_iter_losses = [] # 存储所有 batch 的损失iter_indices = [] # 存储 iteration 序号# 记录每个 epoch 的准确率和损失train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 记录当前 iteration 的损失iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)# 统计准确率和损失running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次打印一次训练信息if (batch_idx + 1) % 100 == 0:print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {iter_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / totaltrain_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_testtest_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)# 更新学习率调度器scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 绘制所有 iteration 的损失曲线plot_iter_losses(all_iter_losses, iter_indices)# 绘制每个 epoch 的准确率和损失曲线plot_epoch_metrics(train_acc_history, test_acc_history, train_loss_history, test_loss_history)return epoch_test_acc # 返回最终测试准确率# 6. 绘制每个 iteration 的损失曲线
def plot_iter_losses(losses, indices):plt.figure(figsize=(10, 4))plt.plot(indices, losses, 'b-', alpha=0.7, label='Iteration Loss')plt.xlabel('Iteration(Batch序号)')plt.ylabel('损失值')plt.title('每个 Iteration 的训练损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 7. 绘制每个 epoch 的准确率和损失曲线
def plot_epoch_metrics(train_acc, test_acc, train_loss, test_loss):epochs = range(1, len(train_acc) + 1)plt.figure(figsize=(12, 4))# 绘制准确率曲线plt.subplot(1, 2, 1)plt.plot(epochs, train_acc, 'b-', label='训练准确率')plt.plot(epochs, test_acc, 'r-', label='测试准确率')plt.xlabel('Epoch')plt.ylabel('准确率 (%)')plt.title('训练和测试准确率')plt.legend()plt.grid(True)# 绘制损失曲线plt.subplot(1, 2, 2)plt.plot(epochs, train_loss, 'b-', label='训练损失')plt.plot(epochs, test_loss, 'r-', label='测试损失')plt.xlabel('Epoch')plt.ylabel('损失值')plt.title('训练和测试损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 8. 执行训练和测试
epochs = 20 # 增加训练轮次以获得更好效果
print("开始使用CNN训练模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cnn_model.pth')
# print("模型已保存为: cifar10_cnn_model.pth")1. 数据预处理和增强
训练集数据增强:使用了随机裁剪、随机水平翻转、随机颜色抖动和随机旋转等操作来扩充训练数据的多样性,帮助模型更好地泛化。
测试集预处理:仅进行了标准化处理,以保持数据的一致性。
2. 数据加载
使用 DataLoader 将 CIFAR-10 数据集加载为批次数据,方便模型训练和测试。
3. CNN 模型定义
卷积块:包括卷积层、批量归一化层、ReLU 激活函数和最大池化层,用于提取图像特征。
全连接层:将卷积层提取的特征展平后,通过全连接层进行分类,最后输出分类结果。
4. 模型训练
损失函数:使用交叉熵损失函数,适用于多分类任务。
优化器:使用 Adam 优化器,学习率为 0.001。
学习率调度器:使用 ReduceLROnPlateau 调度器,根据验证损失动态调整学习率。
5. 训练和测试函数
训练函数:记录每个 iteration 的损失,并在每个 epoch 结束后计算训练和测试的准确率及损失。
测试函数:在测试集上评估模型的性能。
6. 结果可视化
绘制损失曲线:展示每个 iteration 的训练损失变化。
绘制准确率和损失曲线:展示每个 epoch 的训练和测试准确率及损失变化。
7. 执行训练和测试
设置训练轮次为 20,开始训练模型,并在训练结束后输出最终的测试准确率。
这段代码通过 CNN 模型在 CIFAR-10 数据集上实现了图像分类任务,包含了数据预处理、模型定义、训练、测试和结果可视化的完整流程。通过数据增强和学习率调度等技巧,提高了模型的泛化能力和训练效果。
相关文章:

第四十一天打卡
简单CNN 知识回顾 数据增强 卷积神经网络定义的写法 batch归一化:调整一个批次的分布,常用与图像数据 特征图:只有卷积操作输出的才叫特征图 调度器:直接修改基础学习率 卷积操作常见流程如下: 1. 输入 → 卷积层 →…...

C++中指针常量和常量指针的区别
C中指针常量和常量指针的区别 前言 在 C/C 编程中,指针是一个非常重要的概念,而指针常量和常量指针又是指针的两种特殊形式,它们在实际开发中有着不同的应用场景和语义,理解它们的区别对于编写高质量的代码至关重要。本文将详细…...

深入解析向量数据库:基本原理与主流实现
向量数据库(Vector Database)是专门用于存储和检索高维向量的数据库系统。近年来,随着机器学习和深度学习的发展,文本、图像、音频等非结构化数据常被转换为向量表示,用于语义搜索和推荐等场景。这篇博客将面向 Java/P…...

VectorNet:自动驾驶中的向量魔法
在自动驾驶的世界里,车辆需要像超级英雄一样,拥有“透视眼”和“预知未来”的能力,才能在复杂的交通环境中安全行驶。今天,我们要介绍一个神奇的工具——VectorNet,它就像是给自动驾驶车辆装上了一双智能的眼睛&#x…...

PostgreSQL性能监控双雄:深入解析pg_stat_statements与pg_statsinfo
在PostgreSQL的运维和优化工作中,性能监控工具的选择直接关系到问题定位的效率和数据库的稳定性。今天我们将深入探讨两款核心工具:pg_stat_statements(SQL执行统计)和pg_statsinfo(系统级监控),…...

【Linux系列】Linux/Unix 系统中的 CPU 使用率
博客目录 多核处理器时代的 CPU 使用率计算为什么要这样设计? 解读实际案例:268.76%的 CPU 使用率性能分析的意义 相关工具与监控实践1. top 命令2. htop 命令3. mpstat 命令4. sar 命令 实际应用场景容量规划性能调优故障诊断 深入理解:CPU …...
C++语法系列之模板进阶
前言 本次会介绍一下非类型模板参数、模板的特化(特例化)和模板的可变参数,不是最开始学的模板 一、非类型模板参数 字面意思,比如: template<size_t N 10> 或者 template<class T,size_t N 10>比如:静态栈就可以用到&#…...
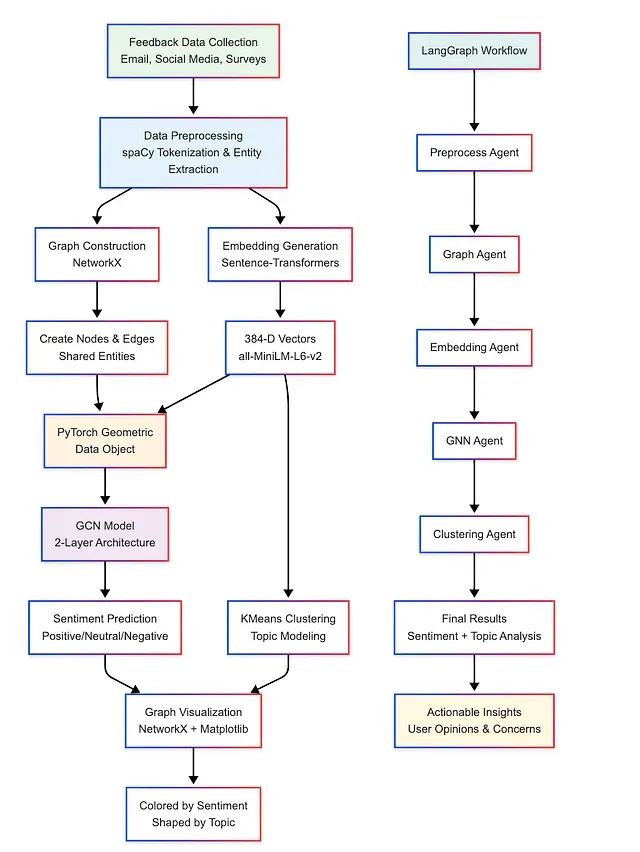
基于图神经网络的自然语言处理:融合LangGraph与大型概念模型的情感分析实践
在企业数字化转型进程中,非结构化文本数据的处理与分析已成为核心技术挑战。传统自然语言处理方法在处理客户反馈、社交媒体内容和内部文档等复杂数据集时,往往难以有效捕获文本间的深层语义关联和结构化关系。大型概念模型(Large Concept Mo…...
R 语言科研绘图 --- 热力图-汇总
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。 为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式: R 语言科研绘图模板 --- sciRplothttps://mp.…...

基于DFT码本的波束方向图生成MATLAB实现
基于DFT码本的波束方向图生成MATLAB实现,包含参数配置、方向图生成和可视化模块: %% 基于DFT码本的波束方向图生成 clc; clear; close all;%% 参数配置 params struct(...N, 8, % 阵元数d, 0.5, % 阵元间距(λ/2)theta_sc…...
)
vBulletin未认证API方法调用漏洞(CVE-2025-48827)
免责声明 本文档所述漏洞详情及复现方法仅限用于合法授权的安全研究和学术教育用途。任何个人或组织不得利用本文内容从事未经许可的渗透测试、网络攻击或其他违法行为。使用者应确保其行为符合相关法律法规,并取得目标系统的明确授权。 对于因不当使用本文信息而造成的任何直…...
解决访问网站提示“405 很抱歉,由于您访问的URL有可能对网站造成安全威胁,您的访问被阻断”问题
一、问题描述 本来前几天都可以正常访问的网站,但是今天当我们访问网站的时候会显示“405 很抱歉,由于您访问的URL有可能对网站造成安全威胁,您的访问被阻断。您的请求ID是:XXXX”,而不能正常的访问网站,如…...

FeignClient发送https请求时的证书验证原理分析
背景 微服务之间存在调用关系,且部署为 SSL 协议时,Feignt 请求报异常: Caused by: javax.net.ssl.SSLHandshakeException: PKIX path building failed: sun.security.provider.certpath.SunCertPathBuilderException: unable to find vali…...

UDP组播套接字与URI/URL/URN技术详解
UDP组播套接字基础 Java通过MulticastSocket类提供对UDP组播通信的支持,该机制允许单个数据报同时发送给多个接收者。组播套接字的工作机制与标准DatagramSocket类似,但核心区别在于其基于组播组成员关系的通信模型。 组播组成员管理 创建并绑定组播套接字后,必须调用joi…...
机器学习中的关键术语及其含义
神经元及神经网络 机器学习中的神经网络是一种模仿生物神经网络的结构和功能的数学模型或计算模型。它是指按照一定的规则将多个神经元连接起来的网络。 神经网络是一种运算模型,由大量的节点(或称神经元)之间相互联接构成。每个节点代表一…...

点云识别模型汇总整理
点云识别模型主要分类: 目前主流的点云识别模型主要分为 基于点直接处理的方法:PointNet、PointNet 、DGCNN、 PointCNN、 Point Transformer、 RandLA-Net、 PointMLP、 PointNeXt ;基于体素化的方法:VoxelNet、SECOND、PV-RCN…...

项目更改权限后都被git标记为改变,怎么去除
❗问题描述: 当你修改了项目中的文件权限(如使用 chmod 改了可执行权限),Git 会把这些文件标记为“已更改”,即使内容并没有发生任何改变。 ✅ 解决方法: ✅ 方法一:告诉 Git 忽略权限变化&am…...
网络编程1_网络编程引入
为什么需要网络编程? 用户再在浏览器中,打开在线视频资源等等,实质上说通过网络,获取到从网络上传输过来的一个资源。 与打开本地的文件类似,只是这个文件的来源是网络。相比本地资源来说,网络提供了更为…...

【Day38】
DAY 38 Dataset和Dataloader类 对应5. 27作业 知识点回顾: Dataset类的__getitem__和__len__方法(本质是python的特殊方法)Dataloader类minist手写数据集的了解 作业:了解下cifar数据集,尝试获取其中一张图片 import …...

HTML Day04
Day04 0.引言1. HTML字符实体2. HTML表单2.1 表单标签2.2 表单示例 3. HTML框架4. HTML颜色4.1 16进制表示法4.2 rgba表示法4.3 名称表达法 5. HTML脚本 0.引言 刚刚回顾了前面几篇博客,感觉写的内容倒是很详细,每个知识点都做了说明。但是感觉在知识组织…...

佳能 Canon G3030 Series 打印机信息
基本参数 连接方式:Hi-Speed USB 接口,支持 IEEE802.11n/802.11g/802.11b/802.11a/802.11ac 无线连接,可同时使用 USB 和网络连接。尺寸重量:外观尺寸约为 416337177mm,重量约为 6.0kg。电源规格:AC 100-2…...
云原生安全基石:Kubernetes 核心概念与安全实践指南
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. Kubernetes 架构全景 Kubernetes(简称 K8s)采用主从架构,由控制平面(Control Plane&…...

图像修复的可视化demo代码
做项目的时候需要用到一个windows窗口可视化来展示我们的工作,我们的工作是一个文本指导的人脸图像修复,所以窗口需要包括输入图像,文本指导输入和修复结果,并且提供在输入图像上画mask的功能,使用tkinter来实现&#…...

autodl 安装了多个conda虚拟环境 选择合适虚拟环境的语句
1.conda env list 列出所有虚拟环境 可以看到,我有两个虚拟环境,一个是joygen,一个是base conda activate base 或者 conda activate joygen 激活对应的环境。我选择激活 joygen 环境 然后就可以在joygen环境下进行操作了 base环境也是同理…...

【AI工具应用】使用 trae 实现 word 转成 html
假如我们要实现某个网站的《隐私协议》等静态页面,产品给了一个 word 文档,以前我都是手动从 word 文档复制一行的文字,然后粘贴到一个html文件中,还得自己加各种标签,很麻烦。 我们可以使用 trae 等 ai 工具实现 wor…...
ansible-playbook 进阶 接上一章内容
1.异常中断 做法1:强制正常 编写 nginx 的 playbook 文件 01-zuofa .yml - hosts : web remote_user : root tasks : - name : create new user user : name nginx-test system yes uid 82 shell / sbin / nologin - name : test new user shell : gete…...
趋势直线指标
趋势直线副图和主图指标,旨在通过技术分析工具帮助交易者识别市场趋势和潜在的买卖点。 副图指标:基于KDJ指标的交易策略 1. RSV值计算: - RSV(未成熟随机值)反映了当前收盘价在过去一段时间内的相对位置。通过计算当前…...

基线配置管理:为什么它对网络稳定性至关重要
什么是基线配置(Baseline Configuration) 基线配置(Baseline Configuration)是经过批准的标准化主设置,代表所有设备应遵循的安全、合规且运行稳定的配置基准,可作为评估变更、偏差或未授权修改的参考基准…...
)
AWS WebRTC:获取ICE服务地址(part 1)
建立WebRTC连接的第二步是获取ICE服务地址。 ICE全称:Interactive Connectivity Establishment,建立互动连接。 ICE 服务地址,主要是 TURN 和 STUN 服务器的地址,用于 WebRTC 在 NAT 网络环境中协商建立连接。 上代码ÿ…...
Nest全栈到失业(一):Nest基础知识扫盲
Nest 是什么? 问你一个问题,node是不是把js拉出来浏览器环境运行了?当然,他使用了v8引擎加上自己的底层模块从而实现了,在外部编辑处理文件等;然后它使用很多方式来发送请求是吧,你知道的什么http.request 或 https.request; 我们浏览器中,使用AJAX以及封装AJAX和http的Axios…...