【论文阅读 | PR 2024 |ICAFusion:迭代交叉注意力引导的多光谱目标检测特征融合】
论文阅读 | PR 2024 |ICAFusion:迭代交叉注意力引导的多光谱目标检测特征融合
- 1.摘要&&引言
- 2.方法
- 2.1 架构
- 2.2 双模态特征融合(DMFF)
- 2.2.1 跨模态特征增强(CFE)
- 2.2.2 空间特征压缩(SFS)
- 2.2.3 迭代跨模态特征增强(ICFE)
- 2.2.4 检测头的融合模式
- 3.实验
- 3.1 数据集与评估指标
- 3.1.1 数据集
- 3.1.2 评估指标
- 3.2 实现细节
- 3.2.1 框架与硬件
- 3.2.2 训练配置
- 3.2.3 基线设置
- 3.3 消融实验
- 3.3.1 残差连接可学习参数
- 3.3.2 单/双模态 CFE 效果
- 3.3.3 模块堆叠数量
- 3.3.4 迭代次数影响
- 3.3.5 空间压缩方法
- 3.3.6 输入模态鲁棒性
- 3.3.7 主干网络兼容性
- 3.4 与 SOTA 方法对比
- 3.4.1 KAIST 数据集
- 3.4.2 FLIR 数据集
- 3.4.3 VEDAI 数据集
- 3.5 定性分析
- 3.6 局限性
- 4. 结论

题目:ICAFusion: Iterative cross-attention guided feature fusion for multispectral object detection
会议:Pattern Recognition(PR)
论文:https://doi.org/10.1016/j.patcog.2023.109913
代码:https://github.com/chanchanchan97/ICAFusion
年份:2024
1.摘要&&引言
多光谱图像的有效特征融合在多光谱目标检测中起着至关重要的作用。以往研究表明,使用卷积神经网络进行特征融合是有效的,但由于其在局部范围特征交互方面的固有缺陷,这些方法对图像错位敏感,导致性能下降。
为解决这一问题,本文提出了一种新型的双交叉注意力 Transformer 特征融合框架,用于建模全局特征交互并同时捕获跨模态的互补信息。该框架通过查询引导的交叉注意力机制增强目标特征的判别力,从而提升性能。
然而,堆叠多个 Transformer 块进行特征增强会导致大量参数和高空间复杂度。为此,受人类复习知识过程的启发,本文提出了一种迭代交互机制,在分块多模态 Transformer 之间共享参数,降低模型复杂度和计算成本。所提方法具有通用性和有效性,可集成到不同的检测框架中,并与不同的主干网络配合使用。
在 KAIST、FLIR 和 VEDAI 数据集上的实验结果表明,所提方法实现了优异的性能和更快的推理速度,适用于各种实际场景。
总结起来,我们的主要贡献如下:
- 提出了一种新颖的双交叉注意力特征融合方法,用于多光谱目标检测,同时聚合来自 RGB 和热图像的互补信息。
- 设计了一种适用于高效多光谱特征融合的迭代学习策略,在不增加可学习参数的情况下进一步提升模型性能。
- 所提出的特征融合方法具有通用性和有效性,可以插入不同的主干网络并配备不同的检测框架。
- 所提出的 CFE/ICFE 模块可以与不同的输入图像模态配合使用,当其中一个模态缺失或质量较差时提供了可行的解决方案。
- 所提出的方法在 KAIST [12]、FLIR [13] 和 VEDAI [14] 数据集上实现了最先进的结果,同时获得了非常快的推理速度。
2.方法
2.1 架构
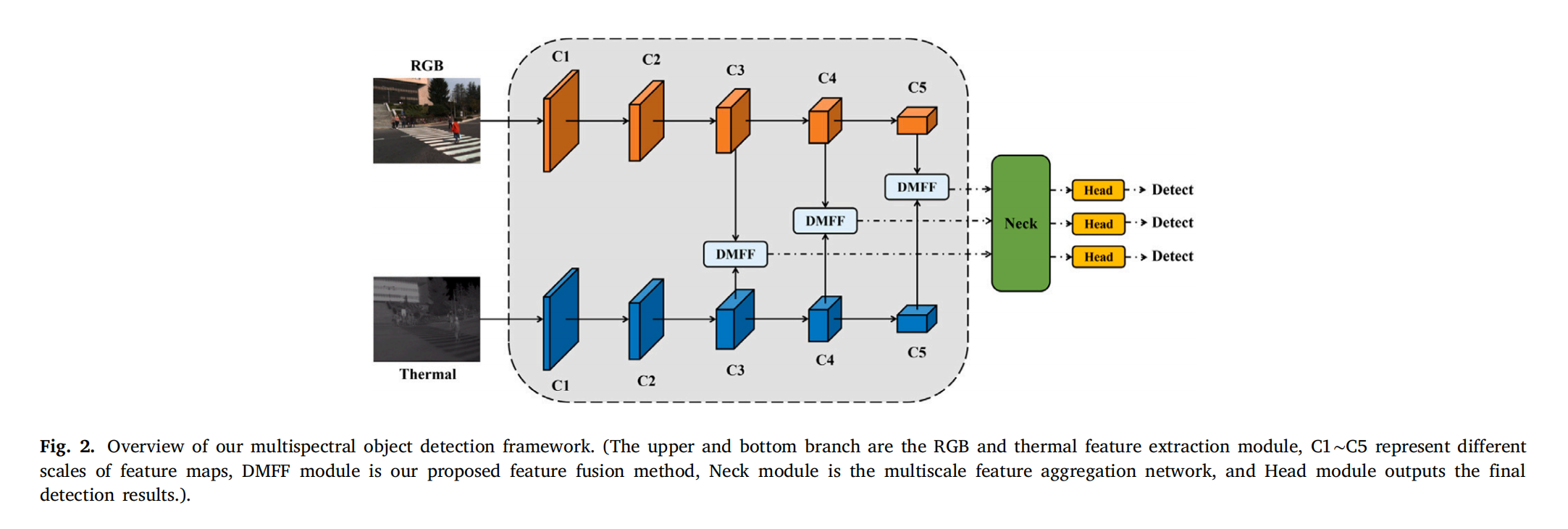
图2. 我们的多光谱目标检测框架概述。(上分支和下分支分别为RGB和热特征提取模块,C1∼C5代表不同尺度的特征图,DMFF模块是我们提出的特征融合方法,Neck模块是多尺度特征聚合网络,Head模块输出最终的检测结果。)
如图 2 所示,所提方法是一种双分支主干网络,专为从 RGB-热图像对中提取特征而设计。我们的方法主要包括三个阶段:单模态特征提取、双模态特征融合以及检测颈部和头部。
单模态特征提取
首先分别用于 RGB 和热图像(如公式(1)所示):
F R i = Ψ backbone ( I R ; θ R ) , F T i = Ψ backbone ( I T ; θ T ) F_{R}^{i} = \Psi_{\text{backbone}}(I_{R}; \theta_{R}), \quad F_{T}^{i} = \Psi_{\text{backbone}}(I_{T}; \theta_{T}) FRi=Ψbackbone(IR;θR),FTi=Ψbackbone(IT;θT)
其中,
- F R i F_{R}^{i} FRi、 F T i ∈ R W × H × C F_{T}^{i} \in \mathbb{R}^{W \times H \times C} FTi∈RW×H×C 分别表示 RGB 和热分支第 i i i 层( i = 3 , 4 , 5 i=3,4,5 i=3,4,5)的特征图
- H H H、 W W W 和 C C C 分别表示特征图的高度、宽度和通道数
- I R I_{R} IR、 I T ∈ R W × H × C I_{T} \in \mathbb{R}^{W \times H \times C} IT∈RW×H×C 表示输入的 RGB 和热图像
- Ψ backbone \Psi_{\text{backbone}} Ψbackbone 表示具有参数 θ R \theta_{R} θR 和 θ T \theta_{T} θT 的特征提取函数,分别用于 RGB 和热分支
在通用目标检测中,VGG16 [34]、ResNet [35] 和 CSPDarkNet [36] 通常用作函数 Ψ backbone \Psi_{\text{backbone}} Ψbackbone。在特征提取阶段,多尺度特征通常用于捕获不同大小的目标。
双模态特征融合
给定 F R i F_{R}^{i} FRi 和 F T i F_{T}^{i} FTi 的特征图,在多光谱目标检测中需要跨模态特征融合来聚合不同分支的特征(如公式(2)所示):
F R + T i = Φ fusion ( F R i ; F T i ; θ f ) F_{R+T}^{i} = \Phi_{\text{fusion}}(F_{R}^{i}; F_{T}^{i}; \theta_{f}) FR+Ti=Φfusion(FRi;FTi;θf)
其中,
- F R + T i ∈ R W × H × C F_{R+T}^{i} \in \mathbb{R}^{W \times H \times C} FR+Ti∈RW×H×C 表示第 i i i 层的融合特征
- Φ fusion ( ⋅ ) \Phi_{\text{fusion}}(\cdot) Φfusion(⋅) 表示具有参数 θ f \theta_{f} θf 的特征融合函数
鉴于以往研究 [5,19] 探索了不同的融合架构,并验证了中途融合优于其他融合方法,我们将中途融合作为默认设置,并融合来自卷积层 C3∼C5 的多模态特征(如图 2 所示)。通常,加法操作或 NIN 融合 [17] 常用作特征融合函数 Φ fusion ( ⋅ ) \Phi_{\text{fusion}}(\cdot) Φfusion(⋅)。在本文中,提出了一种双交叉注意力特征融合 Transformer 来建模 Φ fusion ( ⋅ ) \Phi_{\text{fusion}}(\cdot) Φfusion(⋅),这将在 3.2 节中描述。
检测颈部和头部
最后,来自 { F R + T i } i = 1 L \{F_{R+T}^{i}\}_{i=1}^{L} {FR+Ti}i=1L 的特征图被馈送到检测颈部进行多尺度特征融合,然后传递到检测头部进行后续的分类和回归(如公式(3)所示):
[ D cls , D bbox ] = ϕ head ( ϕ neck ( { F R + T i } i = 1 L ) ; θ h ) \left[D_{\text{cls}}, D_{\text{bbox}}\right] = \phi_{\text{head}}\left(\phi_{\text{neck}}\left(\{F_{R+T}^{i}\}_{i=1}^{L}\right); \theta_{h}\right) [Dcls,Dbbox]=ϕhead(ϕneck({FR+Ti}i=1L);θh)
其中,
- ϕ neck \phi_{\text{neck}} ϕneck 和 ϕ head \phi_{\text{head}} ϕhead 分别表示多尺度特征聚合和检测头部函数
- FPN [37] 和 PANet [38] 通常用作函数 ϕ neck \phi_{\text{neck}} ϕneck 来增强特征的语义表达和定位能力
- ϕ head \phi_{\text{head}} ϕhead 则充当具有参数 θ h \theta_{h} θh 的分类和边界框回归角色,如 YOLO [36] 和 FCOS [39] 的检测头部
为了公平比较,我们采用原始论文中的检测颈部和头部的默认设置。
2.2 双模态特征融合(DMFF)
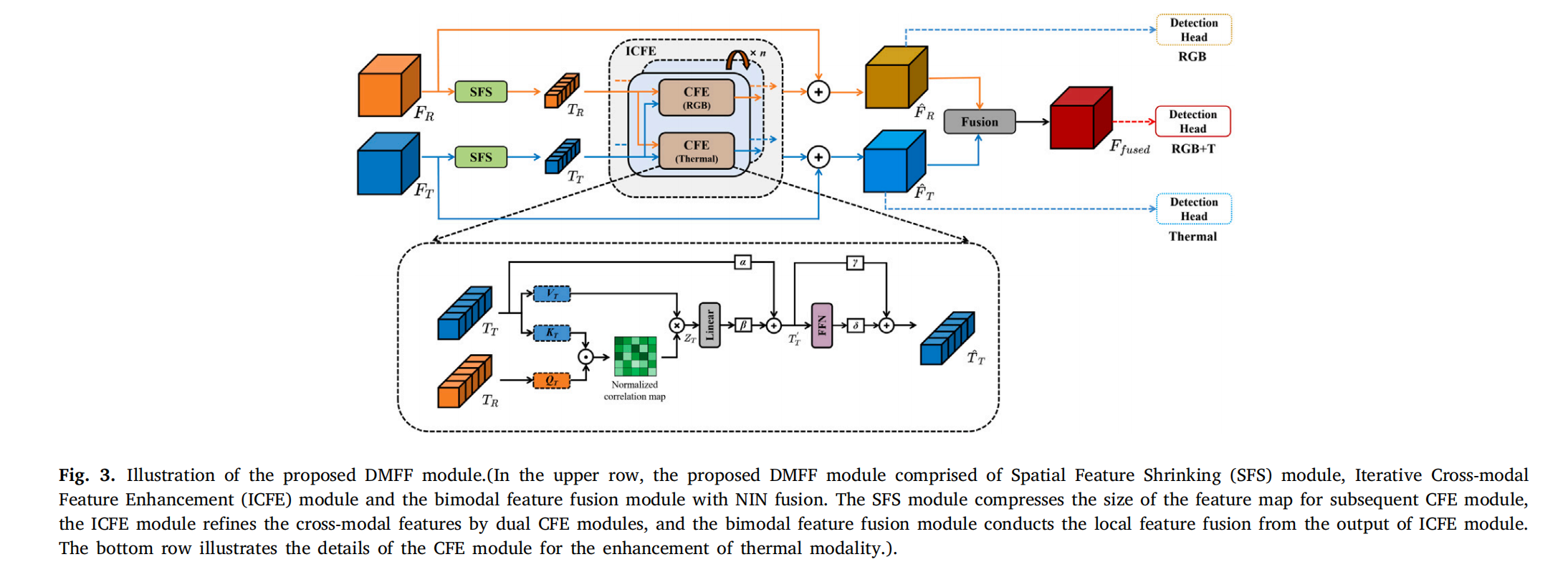
图3. 所提出的DMFF模块示意图。(在上排中,所提出的DMFF模块由空间特征压缩(SFS)模块、迭代跨模态特征增强(ICFE)模块和带有NIN融合的双峰特征融合模块组成。SFS模块为后续的CFE模块压缩特征图的尺寸,ICFE模块通过双CFE模块细化跨模态特征,双峰特征融合模块对ICFE模块的输出进行局部特征融合。下排展示了用于热模态增强的CFE模块的细节。)
图 3 展示了我们的双模态特征融合(DMFF)模块的结构,主要包含三个组件:空间特征压缩(SFS)模块、迭代跨模态特征增强(ICFE)模块和带有 NIN 融合的双峰特征融合模块。这些模块将在以下部分详细介绍。
2.2.1 跨模态特征增强(CFE)
与以往捕获不同模态局部特征的研究不同,所提出的 CFE 模块使单模态能够从全局视角学习来自辅助模态的更多互补信息。该模块不仅检索 RGB 和热模态之间的互补关系,还克服了跨模态特征长程依赖建模的不足。给定输入特征图 F R F_{R} FR 和 F T ∈ R H × W × C F_{T} \in \mathbb{R}^{H \times W \times C} FT∈RH×W×C,首先将每个特征图展平为标记集,并添加可学习的位置嵌入(维度为 H × W × C H \times W \times C H×W×C 的可训练参数)以编码空间信息。随后,得到带有位置嵌入的标记集 T R , T T ∈ R H × W × C T_{R}, T_{T} \in \mathbb{R}^{H \times W \times C} TR,TT∈RH×W×C 作为 CFE 模块的输入。由于 RGB-热图像对通常不完全对齐,我们采用双 CFE 模块分别获取 RGB 和热特征的互补信息(两个模块不共享参数)。如图 3(底部)所示的热分支 CFE 模块流程如下(公式 4):
T ^ T = F C F E − T ( { T R , T T } ) \hat{T}_{T} = F_{CFE-T}\left( \{T_{R}, T_{T}\} \right) T^T=FCFE−T({TR,TT})
其中, T R T_{R} TR 和 T T T_{T} TT 表示输入热模块的 RGB 和热特征标记, T ^ T \hat{T}_{T} T^T 为增强后的热特征, F C F E − T ( ⋅ ) F_{CFE-T}(\cdot) FCFE−T(⋅) 为热分支的 CFE 模块。
CFE 模块细节
-
标记投影:热模态标记 T T T_{T} TT 被投影为查询矩阵 V T V_{T} VT 和键矩阵 K T ∈ R H × W × C K_{T} \in \mathbb{R}^{H \times W \times C} KT∈RH×W×C(公式 5),RGB 模态标记 T R T_{R} TR 被投影为查询矩阵 Q R ∈ R H × W × C Q_{R} \in \mathbb{R}^{H \times W \times C} QR∈RH×W×C:
V T = T T W V , K T = T T W K , Q R = T R W Q , \begin{aligned} V_{T} &= T_{T} W^{V}, \\ K_{T} &= T_{T} W^{K}, \\ Q_{R} &= T_{R} W^{Q}, \end{aligned} VTKTQR=TTWV,=TTWK,=TRWQ,
其中 W V , W K , W Q ∈ R C × C W^{V}, W^{K}, W^{Q} \in \mathbb{R}^{C \times C} WV,WK,WQ∈RC×C 为权重矩阵。 -
跨模态相关性计算:通过点积构建相关矩阵,并应用 softmax 归一化相似度分数(公式 6):
Z T = softmax ( Q R K T ⊤ D K ) ⋅ V T Z_{T} = \text{softmax}\left( \frac{Q_{R} K_{T}^{\top}}{\sqrt{D_{K}}} \right) \cdot V_{T} ZT=softmax(DKQRKT⊤)⋅VT
其中 D K D_{K} DK 为维度缩放因子。随后,通过线性变换生成增强特征 T T ′ T_{T}' TT′(公式 7):
T T ′ = α ⋅ Z T W O + β ⋅ T T T_{T}' = \alpha \cdot Z_{T} W^{O} + \beta \cdot T_{T} TT′=α⋅ZTWO+β⋅TT
其中 W O ∈ R C × C W^{O} \in \mathbb{R}^{C \times C} WO∈RC×C 为 FFN 层前的输出权重矩阵, α , β \alpha, \beta α,β 为可学习参数。 -
残差连接与多头机制:增强特征通过残差连接(公式 8)和 FFN 进一步细化(受 [40] 启发):
T ^ T = γ ⋅ T T ′ + δ ⋅ FFN ( T T ′ ) \hat{T}_{T} = \gamma \cdot T_{T}' + \delta \cdot \text{FFN}(T_{T}') T^T=γ⋅TT′+δ⋅FFN(TT′)
其中 γ , δ \gamma, \delta γ,δ 为初始化为 1 的可学习参数。多头交叉注意力机制(8 个并行头)使模型从多视角理解跨模态相关性。
RGB 分支增强
类似地,另一个 CFE 模块用于增强 RGB 分支特征(公式 9):
T ^ R = F C F E − R ( { T R , T T } ) \hat{T}_{R} = \mathcal{F}_{CFE-R}\left( \{T_{R}, T_{T}\} \right) T^R=FCFE−R({TR,TT})
与 CFT [10] 不同,本文采用双独立交叉注意力 Transformer,仅通过辅助模态查询计算相关性,降低了计算复杂度(见表 1)。
2.2.2 空间特征压缩(SFS)
尽管用于融合的初始特征图通过主干网络进行了下采样,但模型的参数和内存成本仍可能远超标准处理器的运行要求。为了在特征图中减少信息损失的同时降低后续模块的计算成本,我们在 CFE 模块前应用了 SFS 模块来压缩特征图。在该模块中,我们尝试了两种不同的卷积和池化操作方法,细节如下:
卷积操作:我们首先设计了一种基于卷积操作的降维方法(如公式(10)所示)。具体来说,通过重塑特征图的维度将空间信息转换到通道维度,再通过 1 × 1 1 \times 1 1×1 卷积压缩通道维度:
F conv = conv 1 × 1 ( Reshape ( F ) ) F_{\text{conv}} = \text{conv}_{1 \times 1}(\text{Reshape}(F)) Fconv=conv1×1(Reshape(F))
其中, F F F 表示输入特征图, F conv F_{\text{conv}} Fconv 表示压缩后的特征图。
池化操作:平均池化和最大池化通过不同策略保留背景或纹理信息(如公式(12)所示)。受混合池化 [41] 启发,我们采用自适应加权聚合方法:
F a = AvgPooling ( F , S ) , F m = MaxPooling ( F , S ) , F o = λ ⋅ F a + ( 1 − λ ) ⋅ F m , \begin{aligned} F_a &= \text{AvgPooling}(F, S), \\ F_m &= \text{MaxPooling}(F, S), \\ F_o &= \lambda \cdot F_a + (1 - \lambda) \cdot F_m, \end{aligned} FaFmFo=AvgPooling(F,S),=MaxPooling(F,S),=λ⋅Fa+(1−λ)⋅Fm,
其中, λ ∈ [ 0 , 1 ] \lambda \in [0, 1] λ∈[0,1] 是可学习参数。
2.2.3 迭代跨模态特征增强(ICFE)
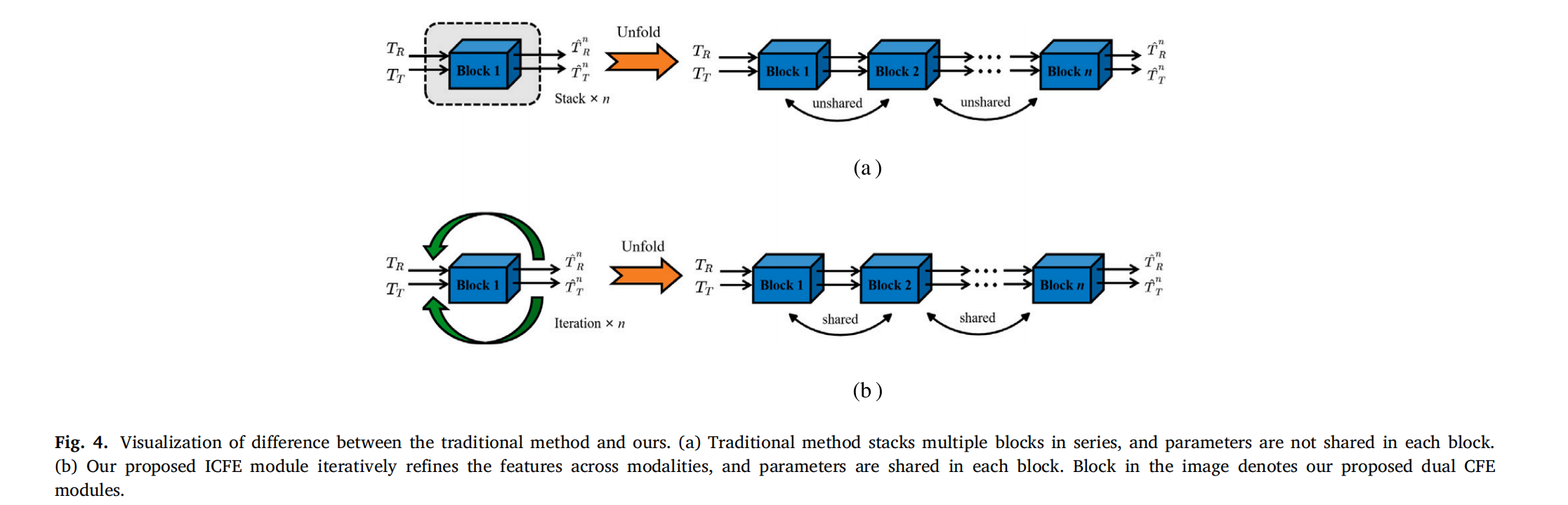
图4. 传统方法与我们方法的差异可视化。(a) 传统方法串联堆叠多个模块,且每个模块的参数不共享。(b) 我们提出的ICFE模块通过迭代方式跨模态细化特征,且每个模块共享参数。图中的“Block”表示我们提出的双CFE模块。
为增强对跨模态和模态内互补信息的记忆,我们提出 ICFE 模块(如图 4(b))。与传统堆叠模块(图 4(a))不同,ICFE 通过参数共享的迭代学习逐步细化特征:
{ T ^ R n , T ^ T n } = F ICFE ( { T R , T T } , n ) = F CFE ( ⋯ F CFE ( { T R , T T } ) ) ⏟ n 次迭代 , \begin{aligned} \{\hat{T}_R^n, \hat{T}_T^n\} &= \mathcal{F}_{\text{ICFE}}(\{T_R, T_T\}, n) \\ &= \underbrace{\mathcal{F}_{\text{CFE}}(\cdots \mathcal{F}_{\text{CFE}}(\{T_R, T_T\}))}_{n \text{次迭代}}, \end{aligned} {T^Rn,T^Tn}=FICFE({TR,TT},n)=n次迭代 FCFE(⋯FCFE({TR,TT})),
其中 F ICFE ( ⋅ ) \mathcal{F}_{\text{ICFE}}(\cdot) FICFE(⋅) 集成两个 CFE 模块(分别用于 RGB 和热分支),每次迭代输出作为下一轮输入。最终特征图通过双线性插值恢复至原始尺寸。
2.2.4 检测头的融合模式
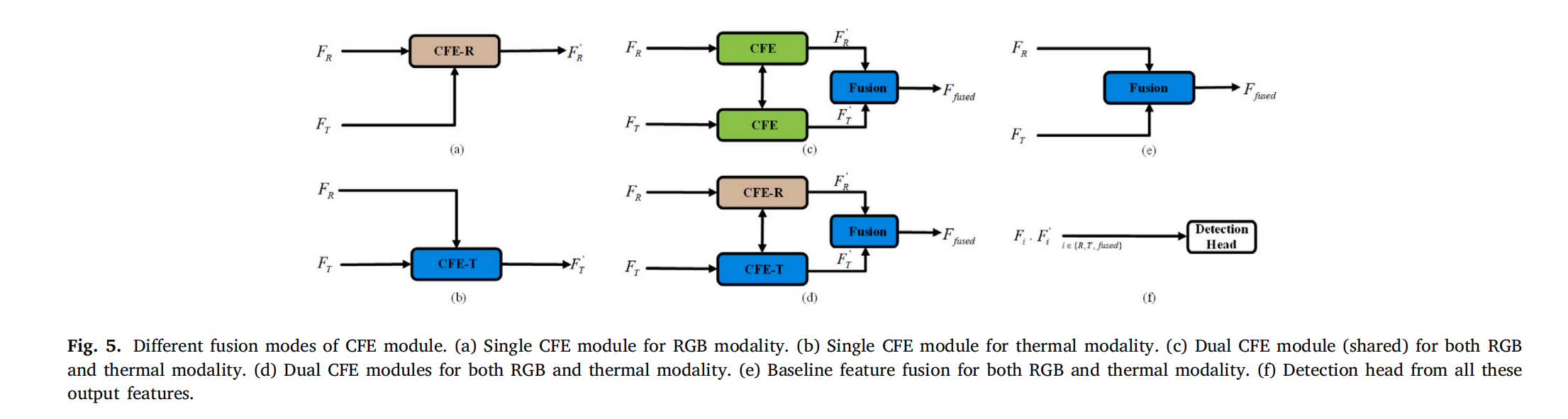
图 5. CFE 模块的不同融合模式。(a) 用于 RGB 模态的单个 CFE 模块。(b) 用于热模态的单个 CFE 模块。© 用于 RGB 和热模态的双 CFE 模块(参数共享)。(d) 用于 RGB 和热模态的双 CFE 模块(参数不共享)。(e) RGB 和热模态的基线特征融合模式。(f) 基于所有这些输出特征的检测头。
图 5 展示了四种融合模式的对比实验:
- 单模态输出(图 5(a)(b)):强制 CFE-R/CFE-T 分别从热/RGB 特征中提取互补信息。
- 双 CFE 共享参数(图 5©):共享 CFE 参数处理双模态输入。
- 双 CFE 独立参数(图 5(d)):为 RGB 和热分支分配独立 CFE 参数。
- 基线 NIN 融合(图 5(e)):采用 NIN [17] 的传统融合方法。
所有融合后的特征图( F i , F i ′ , i ∈ { R , T , fused } F_i, F_i', i \in \{R, T, \text{fused}\} Fi,Fi′,i∈{R,T,fused})均输入检测头(如图 5(f))。实验表明,即使单模态输入质量较差(如图 5©),交叉注意力机制仍能保证鲁棒性。
3.实验
3.1 数据集与评估指标
3.1.1 数据集
-
KAIST 数据集 [12]
多光谱行人检测基准数据集,包含 8,963 对训练图像和 2,252 对测试图像(分辨率 640×512)。评估采用对数平均漏检率( M R − 2 MR^{-2} MR−2),使用清洗后的标注数据 [20,5]。 -
FLIR 数据集 [13]
包含 5,142 对多光谱图像(4,129 训练/1,013 测试),目标类别为“行人”“汽车”“自行车”。采用对齐版本 [16],标注 3 类目标。 -
VEDAI 数据集 [14]
航空图像数据集,含 1,268 对 RGB-红外图像(1024×1024 分辨率),标注 3,700+ 个车辆目标。采用水平框格式标注 [43]。
3.1.2 评估指标
- M R − 2 MR^{-2} MR−2:用于 KAIST,计算 9 个对数均匀采样 FPPI 值的平均漏检率(值越低越好)。
- AP/ m A P mAP mAP:目标检测指标,IoU=0.5 阈值下计算平均精度, m A P mAP mAP 为多类平均。
3.2 实现细节
3.2.1 框架与硬件
- 框架:PyTorch 1.7.1
- 硬件:Ubuntu 18.04,CPU i7-9700,64G RAM,Nvidia RTX 3090 24G GPU。
3.2.2 训练配置
- 优化器:SGD(初始学习率 1.0 × 10 − 2 1.0 \times 10^{-2} 1.0×10−2,动量 0.937,权重衰减 0.0005)。
- 数据增强:马赛克增强 + 随机翻转。
- 学习率策略:余弦退火,60 个 epoch。
3.2.3 基线设置
- 消融基线:YOLOv5 + NIN 融合 [17](检测头/颈部沿用原始设计)。
3.3 消融实验
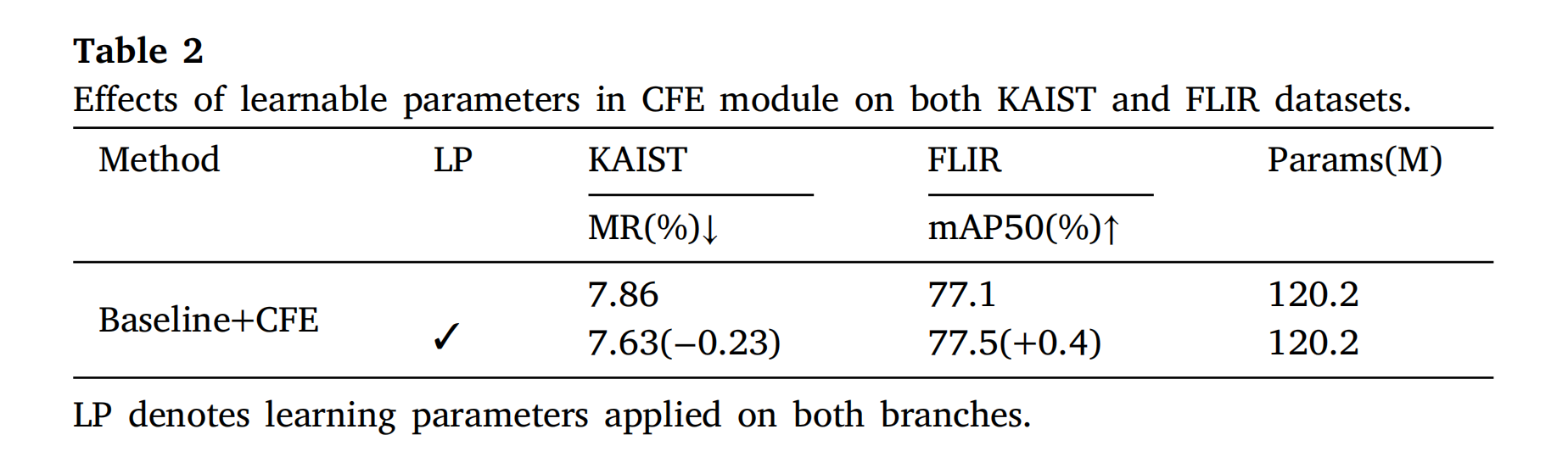
3.3.1 残差连接可学习参数
表 2 显示双分支可学习参数使 KAIST 的 M R MR MR 从 7.86% 降至 7.63%,FLIR 的 m A P 50 mAP_{50} mAP50 从 77.1% 提升至 77.5%。
3.3.2 单/双模态 CFE 效果
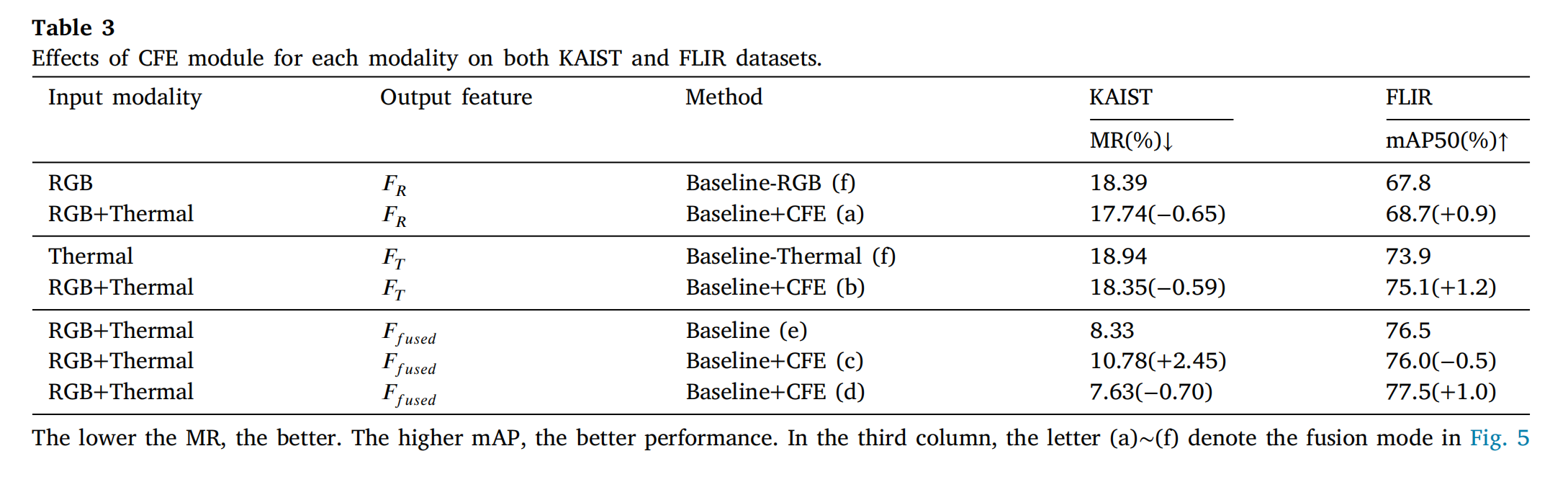
MR值越低越好。mAP值越高,性能越好。在第三列中,字母(a)~(f)表示图5中的融合模式。
表 3 对比不同模式:
- 单模态增强(图 5(a)(b)):KAIST M R MR MR 降 0.59%~0.65%,FLIR m A P 50 mAP_{50} mAP50 提 0.9%~1.2%。
- 双模态融合(图 5(d)):综合性能最优,KAIST M R MR MR 降 0.70%,FLIR m A P 50 mAP_{50} mAP50 提 1.00%。
3.3.3 模块堆叠数量
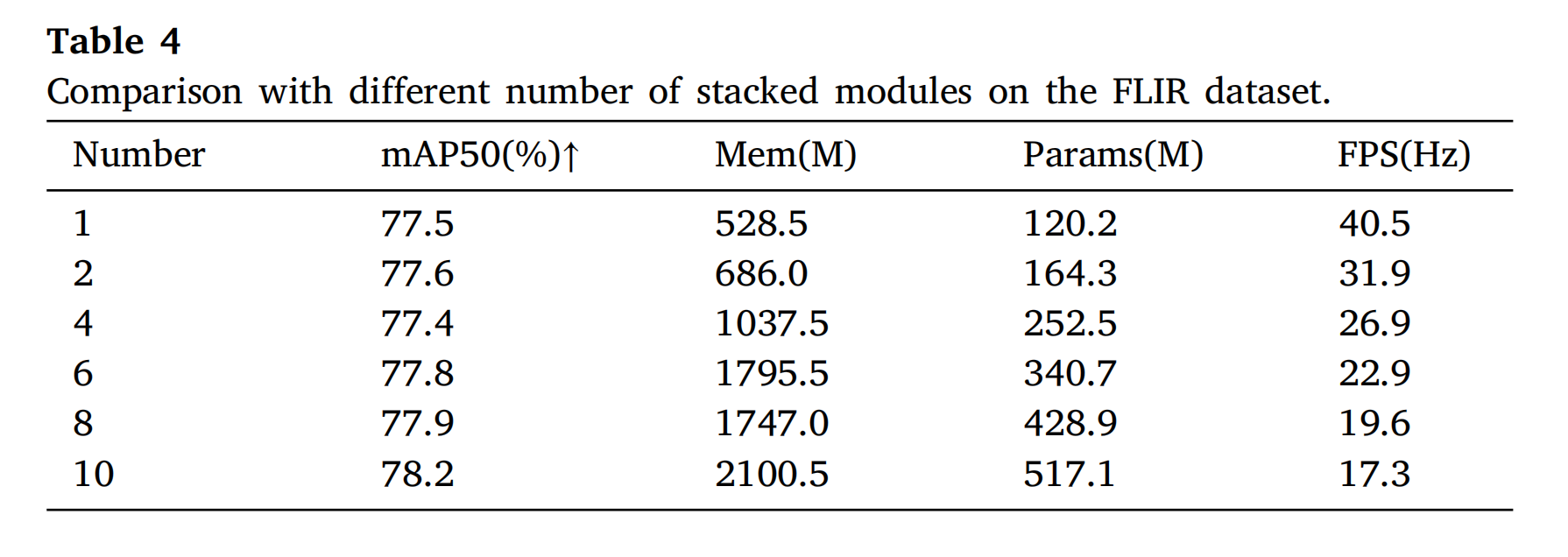
表 4 显示堆叠 10 个 CFE 模块时,参数/CPU 内存增 4 倍,推理速度从 40.5 Hz 降至 17.3 Hz, m A P mAP mAP 仅增 0.70%(图 6右)。
3.3.4 迭代次数影响
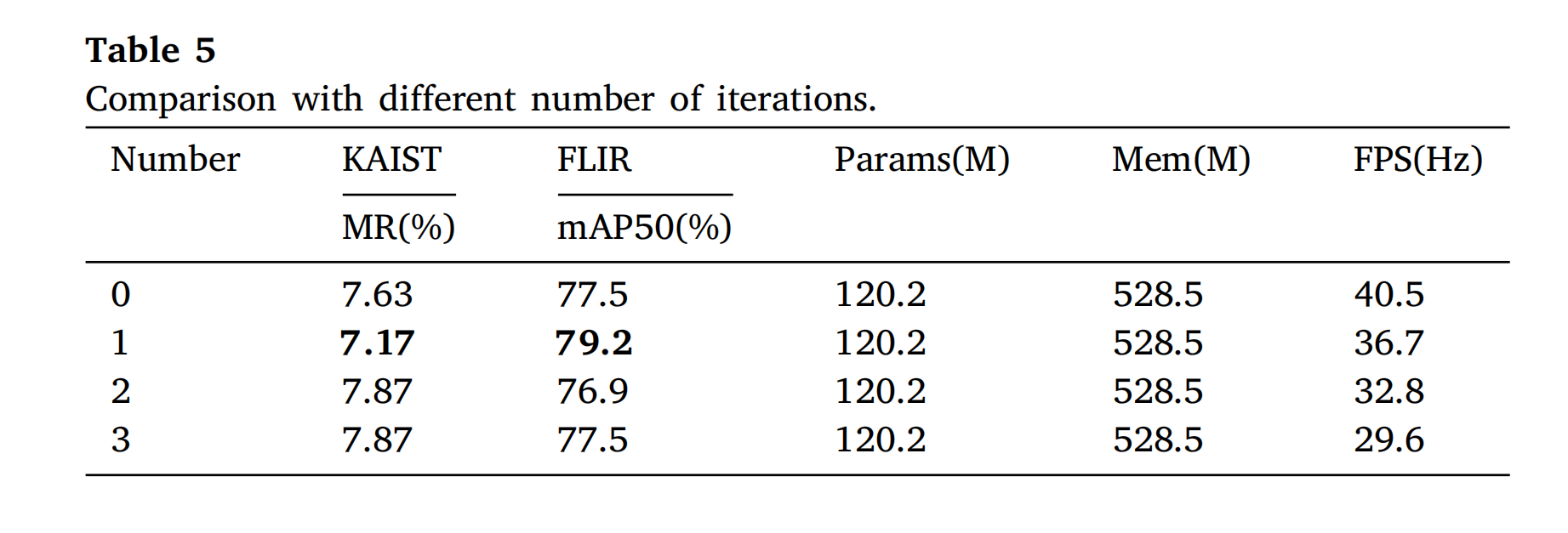
表 5 表明:1 次迭代即可使 KAIST M R MR MR 从 7.63% 降至 7.17%,FLIR m A P 50 mAP_{50} mAP50 从 77.5% 提至 79.2%(图 6左)。
3.3.5 空间压缩方法
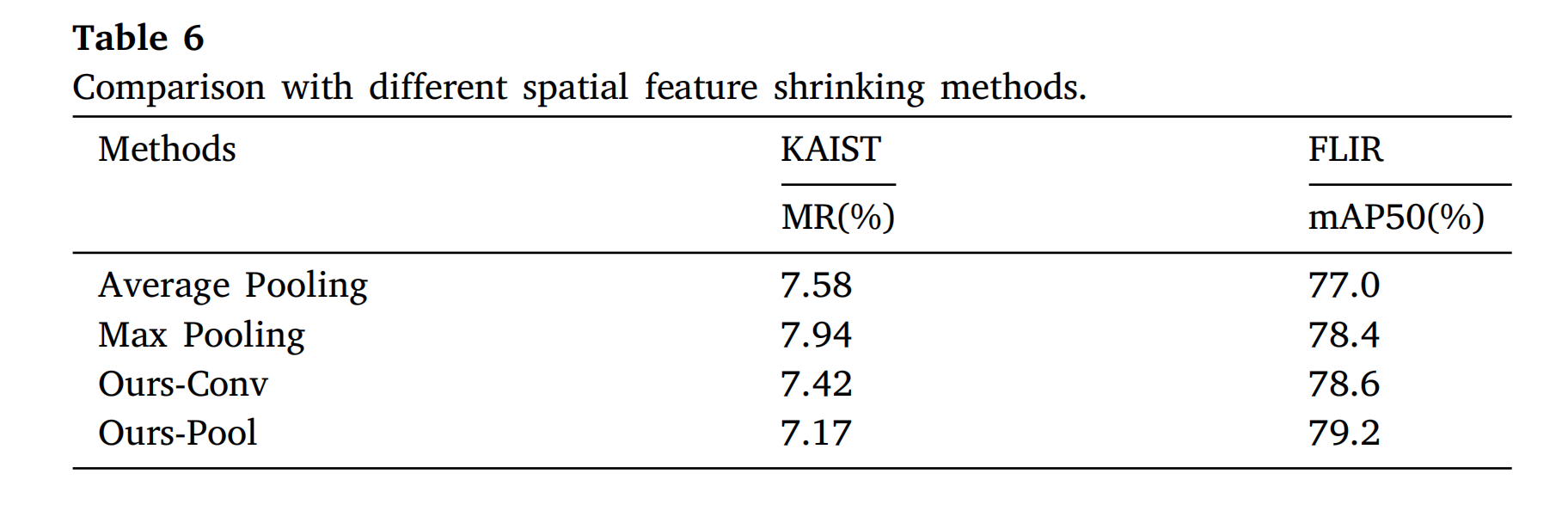
表 6 对比下采样方法:混合池化(Ours-Pool)在 KAIST/FLIR 上分别达到 M R = 7.17 % MR=7.17\% MR=7.17% 和 m A P 50 = 79.20 % mAP_{50}=79.20\% mAP50=79.20%。
3.3.6 输入模态鲁棒性
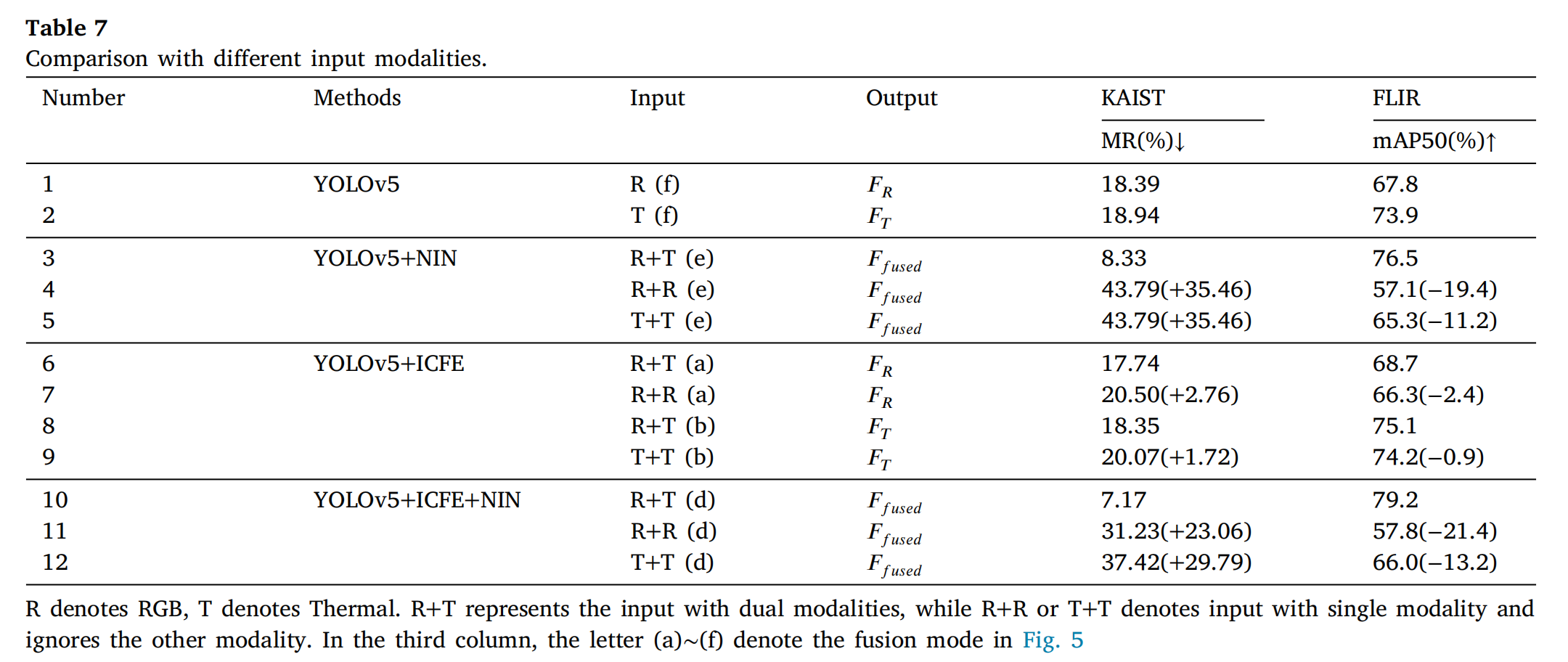
R表示RGB,T表示热成像。R+T代表双模态输入,而R+R或T+T表示单模态输入(忽略另一模态)。在第三列中,字母(a)~(f)对应图5中的融合模式。
表 7 验证:
- 单模态输入:YOLOv5+ICFE 性能接近双模态基线。
- 同模态输入:ICFE 在 R+R/T+T 场景下仍保持鲁棒性,NIN 融合性能骤降。
3.3.7 主干网络兼容性
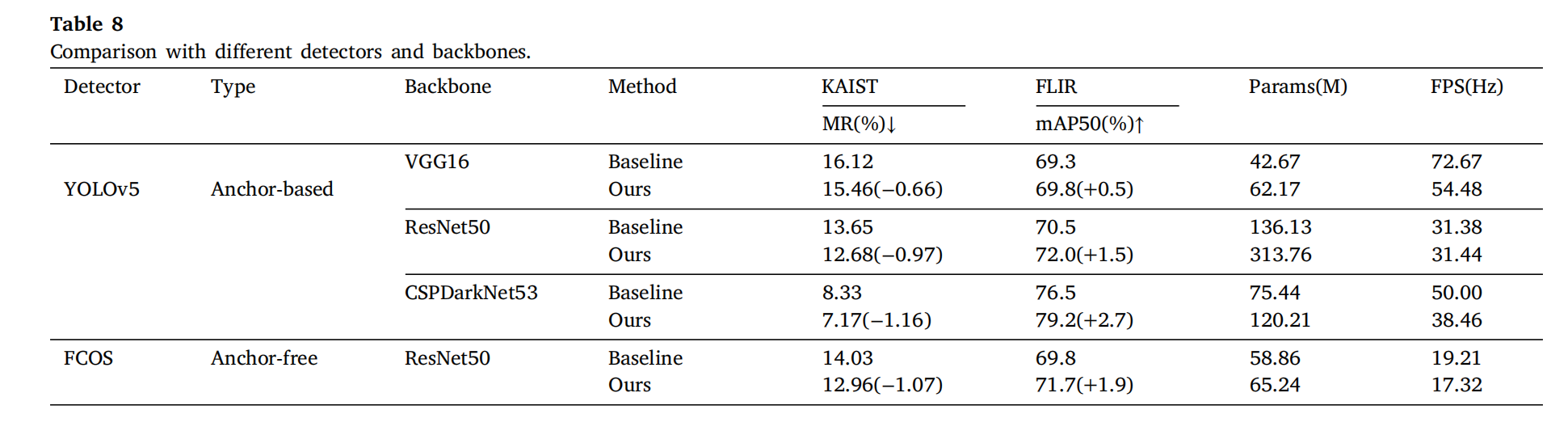
表 8 显示 DMFF 在 YOLOv5(VGG16/ResNet50/CSPDarkNet53)和 FCOS 上均提升性能(KAIST M R MR MR 降 0.66%~1.16%)。
3.4 与 SOTA 方法对比
3.4.1 KAIST 数据集
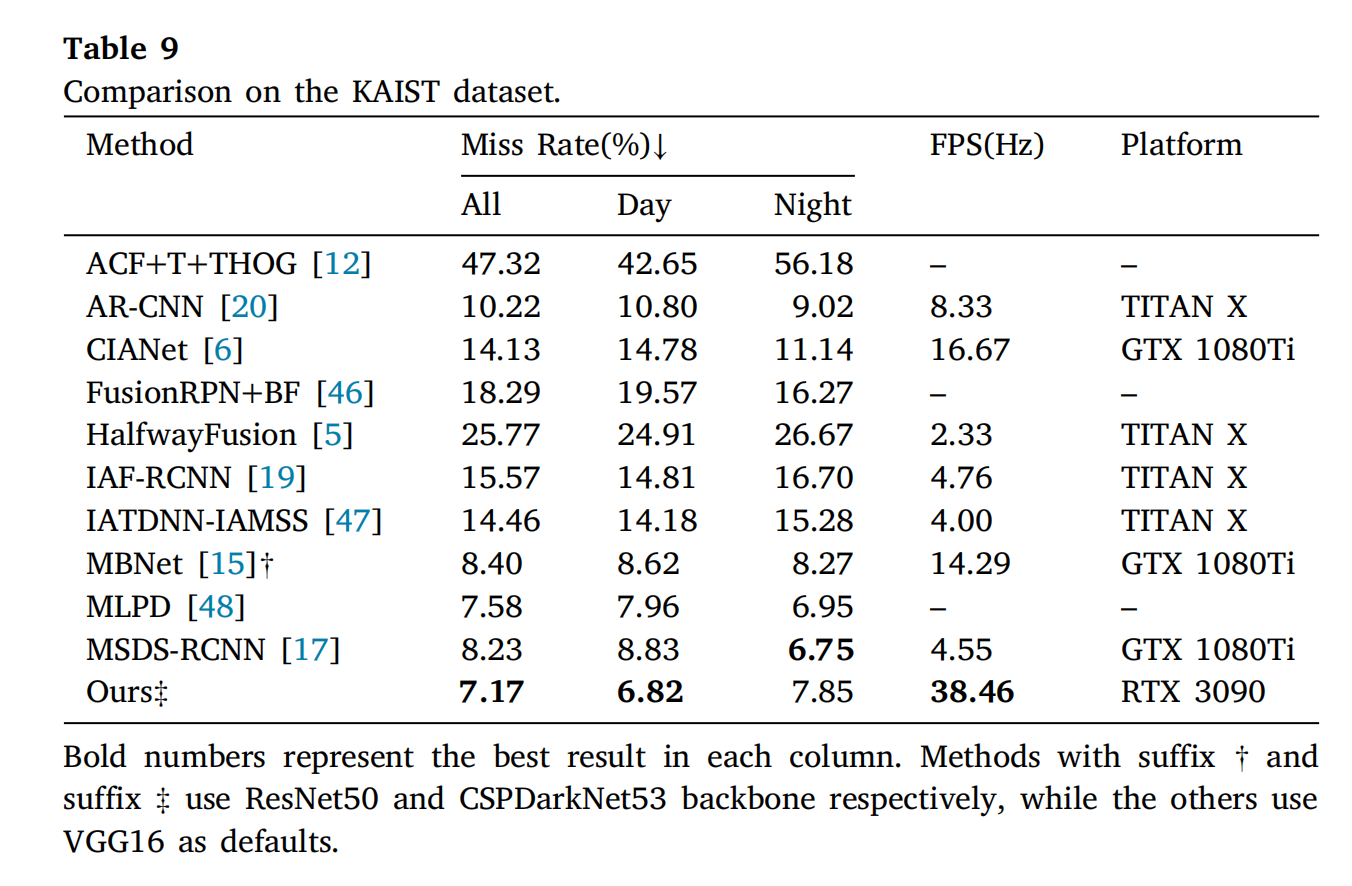
粗体数字表示每列中的最佳结果。带有后缀†和后缀‡的方法分别使用ResNet50和CSPDarkNet53主干网络,而其他方法默认使用VGG16。
表 9 显示:
- 白天子集 M R = 6.82 % MR=6.82\% MR=6.82%(最低漏检率)。
- 实时推理速度 38.46 Hz。
3.4.2 FLIR 数据集
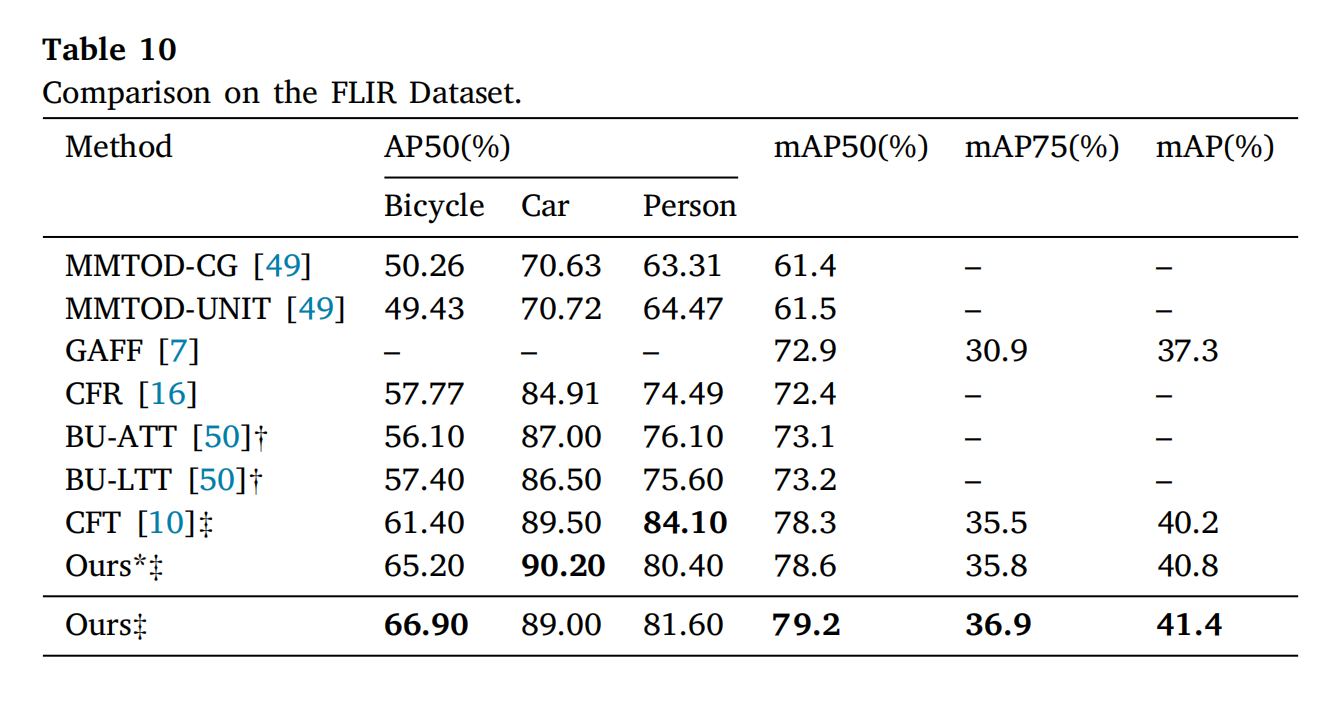
表 10 刷新记录: m A P 50 = 79.20 % mAP_{50}=79.20\% mAP50=79.20%, m A P = 41.4 % mAP=41.4\% mAP=41.4%(各类别 AP 领先)。
3.4.3 VEDAI 数据集
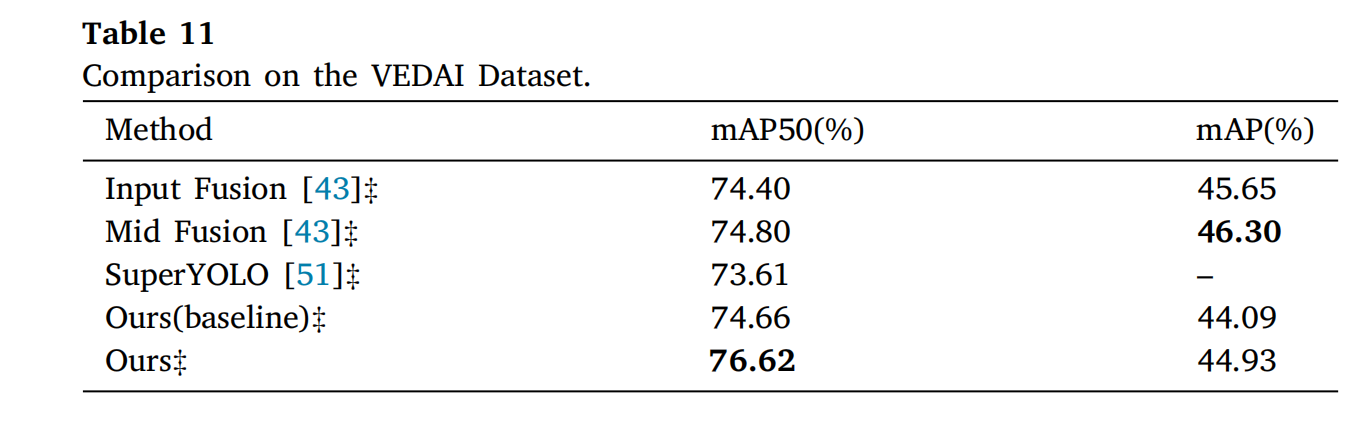
表 11 中 m A P 50 = 76.62 % mAP_{50}=76.62\% mAP50=76.62%,小目标检测竞争力显著。
3.5 定性分析

图7. KAIST和FLIR数据集上注意力图的可视化结果。从左到右列:RGB和热图像中的真实标注(ground truth)、NIN融合[17]方法(基线)的热力图、以及我们提出的方法。
图 7 可视化注意力图:
- 光照不足场景:热模态特征有效辅助行人检测。
- 复杂城市场景:跨模态全局信息减少误检(基线 NIN 注意力分散)。
3.6 局限性
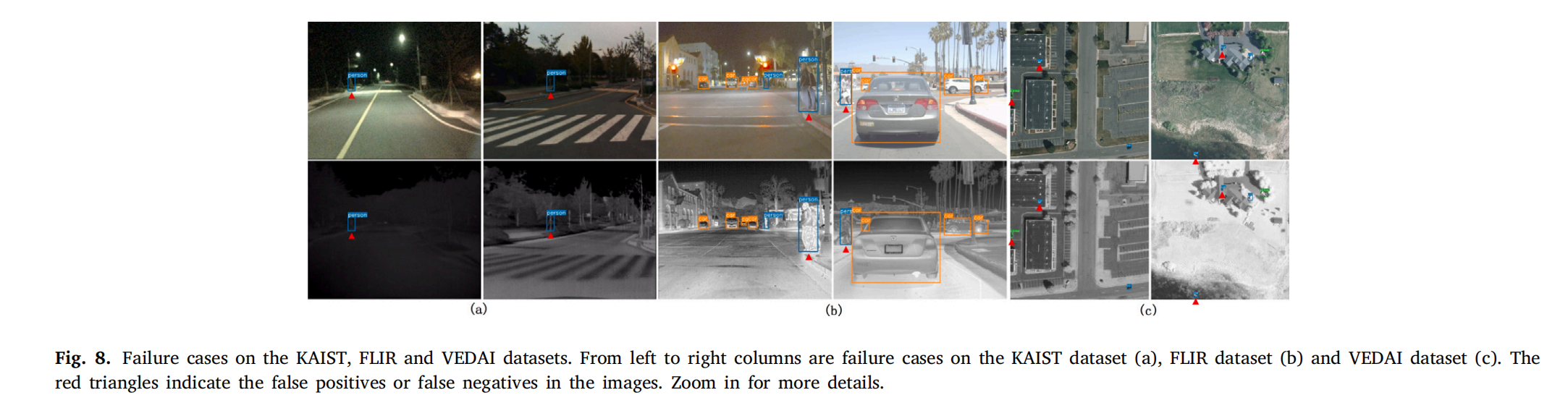
图8. KAIST、FLIR和VEDAI数据集上的失败案例。从左到右列分别为KAIST数据集(a)、FLIR数据集(b)和VEDAI数据集(c)上的失败案例。红色三角形表示图像中的假阳性或假阴性。请放大查看更多细节。
图 8 展示失败案例:
- KAIST:低质量图像导致交通标志/树木误检为行人。
- FLIR:遮挡行人漏检。
- VEDAI:航拍视角下车辆与屋顶设备形状相似导致误判。
4. 结论
本文提出了一种适用于多光谱目标检测的新型跨模态特征融合框架 ——ICAFusion,该框架通过双交叉注意力 Transformer和迭代学习策略解决了传统方法在局部特征交互和计算复杂度上的局限性。具体贡献如下:
- 双交叉注意力特征增强(CFE)模块:通过跨模态的全局特征交互,捕获 RGB 与热图像的互补信息,显著提升特征判别力。与传统 Transformer 方法相比,本文设计的双分支结构仅通过辅助模态生成查询,计算复杂度降低 50%(见表 1)。
- 迭代跨模态特征增强(ICFE)模块:受人类知识复习机制启发,通过参数共享的迭代机制替代传统堆叠模块,在不增加可学习参数的前提下,实现特征的逐层细化。实验表明,仅需 1 次迭代即可使 FLIR 数据集的 mAP50 提升 1.7%,且推理速度达 36.7 FPS,优于堆叠 10 个模块的基线方法(见表 5、表 4)。
- 通用融合架构:所提方法可无缝集成到 YOLOv5、FCOS 等主流检测框架,并兼容 VGG16、ResNet50 等多种主干网络。在 KAIST、FLIR、VEDAI 数据集上的实验显示,ICAFusion 在检测精度(如 KAIST 数据集 MR 低至 7.17%)和推理速度(如 FLIR 数据集 38.46 FPS)上均优于现有方法。
局限性与未来工作:
尽管 ICAFusion 在多光谱融合中表现优异,但在极端遮挡(如 FLIR 数据集中重叠行人)、小目标(如 VEDAI 数据集)和模态严重失配场景下仍存在误检风险。未来计划通过以下方向优化:
- 引入层次化特征对齐机制,缓解图像错位对跨模态交互的影响;
- 设计轻量化注意力模块,进一步降低计算成本以适配边缘设备;
- 拓展至视频多模态任务,探索时空特征联合建模的可行性。
相关文章:
【论文阅读 | PR 2024 |ICAFusion:迭代交叉注意力引导的多光谱目标检测特征融合】
论文阅读 | PR 2024 |ICAFusion:迭代交叉注意力引导的多光谱目标检测特征融合 1.摘要&&引言2.方法2.1 架构2.2 双模态特征融合(DMFF)2.2.1 跨模态特征增强(CFE)2.2.2 空间特征压缩(SFS)…...

Spring Security加密模块深度解析
Spring Security加密模块概述 Spring Security Crypto模块(简称SSCM)是Spring Security框架中专门处理密码学相关操作的组件。由于Java语言本身并未提供开箱即用的加密/解密功能及密钥生成能力,开发者在实现这些功能时往往需要引入额外依赖库。SSCM通过提供内置解决方案,有…...

华为OD机试真题——模拟消息队列(2025A卷:100分)Java/python/JavaScript/C++/C语言/GO六种最佳实现
2025 A卷 100分 题型 本文涵盖详细的问题分析、解题思路、代码实现、代码详解、测试用例以及综合分析; 并提供Java、python、JavaScript、C++、C语言、GO六种语言的最佳实现方式! 2025华为OD真题目录+全流程解析/备考攻略/经验分享 华为OD机试真题《模拟消息队列》: 目录 题…...
MySql(十三)
目录 mysql外键约束 准备工作 创建表 插入数据 创建表时添加外键 1..格式 2..创建表student表时,为其添加外键 3.插入数据测试 正常数据 异常数据 3.使用alter添加外键 删除外键 添加外键 4.Mysql外键不生效的原因 修改引擎 phpystudy的mysql位置 mysql外键约束 注&…...
iOS —— UI 初探
简介 第一次新建时,你可能会好奇。为什么有这么多文件,他们都有什么用? App 启动与生命周期管理相关 文件名 类型 作用 main.m m 程序入口,main() 函数定义在这里 AppDelegate.h/.m h/m App 启动/进入后台/退出等全局事…...

day23-计算机网络-1
1. 网络简介 1.1. 网络介质 网线:cat5,cat5e 六类网线,七类网线,芭蕾网线光纤:wifi:无线路由器,ap5G 1.2. 常见网线类型 1.2.1. 双绞线(Twisted Pair Cable)【最常用】 按性能主…...

C语言基础(09)【数组的概念 与一维数组】
数组 数组的概念 什么是数组 数组是相同类型、有序数据的集合。 数组的特征 数组中的数据称之为数组的元素(数组中的每一个匿名变量空间,是同构的)数组中的元素存放在内存空间建立。 衍生概念:下标(索引) 下标或者索引代表…...

【JavaScript】Ajax 侠客行:axios 轻功穿梭服务器间
一、AJAX 概念和 axios 使用讲解 什么是 AJAX ? 使用浏览器的 XMLHttpRequest 对象与服务器通信 浏览器网页中,使用 AJAX技术(XHR对象)发起获取省份列表数据的请求,服务器代码响应准备好的省份列表数据给前端,前端…...

Django数据库连接报错 django.db.utils.NotSupportedError: MySQL 8 or later is required
可尝试换django版本 pip install django3.2.13 另外mysql下载地址 https://dev.mysql.com/downloads/installer/ 安装可以参考: https://blog.csdn.net/HHHQHHHQ/article/details/148125549 重点:用户变量添加 C:\Program Files\MySQL\MySQL Server …...
2025年- H57-Lc165--994.腐烂的橘子(图论,广搜)--Java版
1.题目描述 2.思路 3.代码实现 import java.util.LinkedList; import java.util.Queue;public class H994 {public int orangesRotting(int[][] grid) {//1.获取行数int rowsgrid.length;int colsgrid[0].length;//2.创建队列用于bfsQueue<int[]> quenew LinkedList<…...

2024 CKA模拟系统制作 | Step-By-Step | 16、题目搭建-sidecar 代理容器日志
目录 免费获取题库配套 CKA_v1.31_模拟系统 一、题目 二、考点分析 1. Sidecar 容器模式 2. 共享卷配置 3. 日志流式处理 4. 容器规范修改 三、考点详细讲解 1. Sidecar 模式架构 2. 关键组件解析 3. 日志流式处理原理 四、实验环境搭建步骤 1.编辑11-factor-app…...
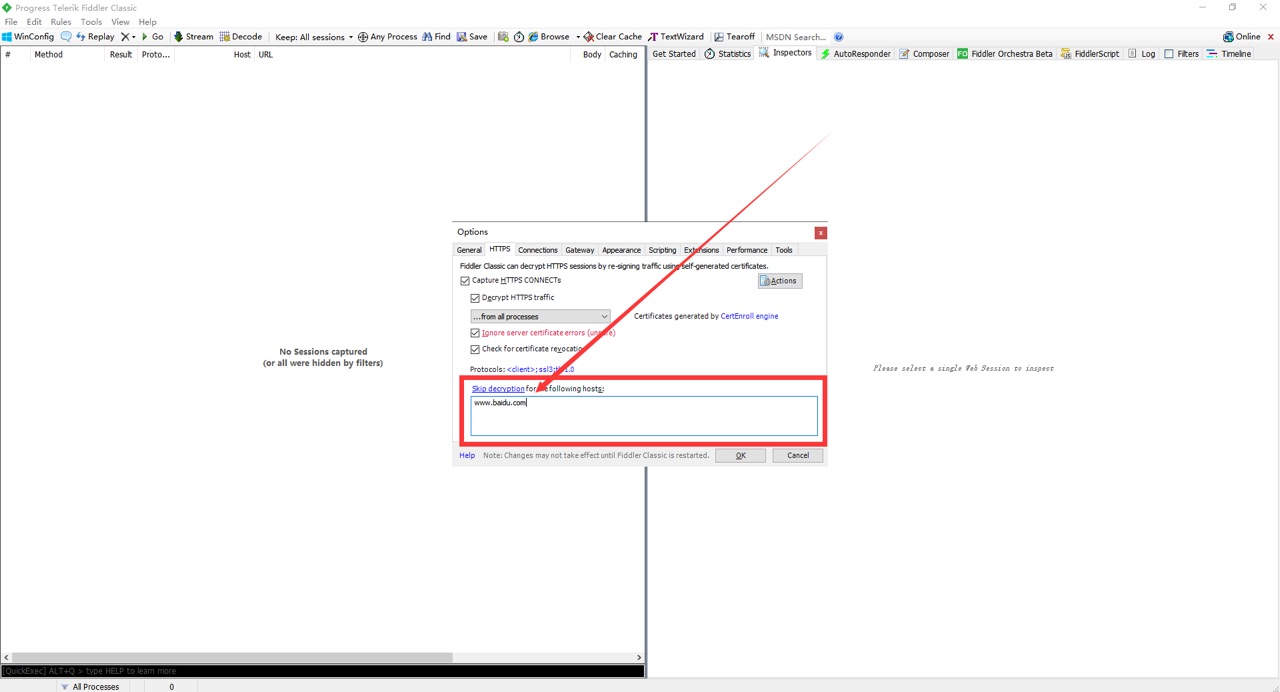
(9)-Fiddler抓包-Fiddler如何设置捕获Https会话
1.简介 由于近几年来各大网站越来越注重安全性都改成了https协议,不像前十几年前直接是http协议直接裸奔在互联网。接着讲解如何抓取https协议会话。 2.什么是HTTPS? HTTPS就是加过密的HTTP。使用HTTPS后,浏览器客户端和Web服务器传输的数…...
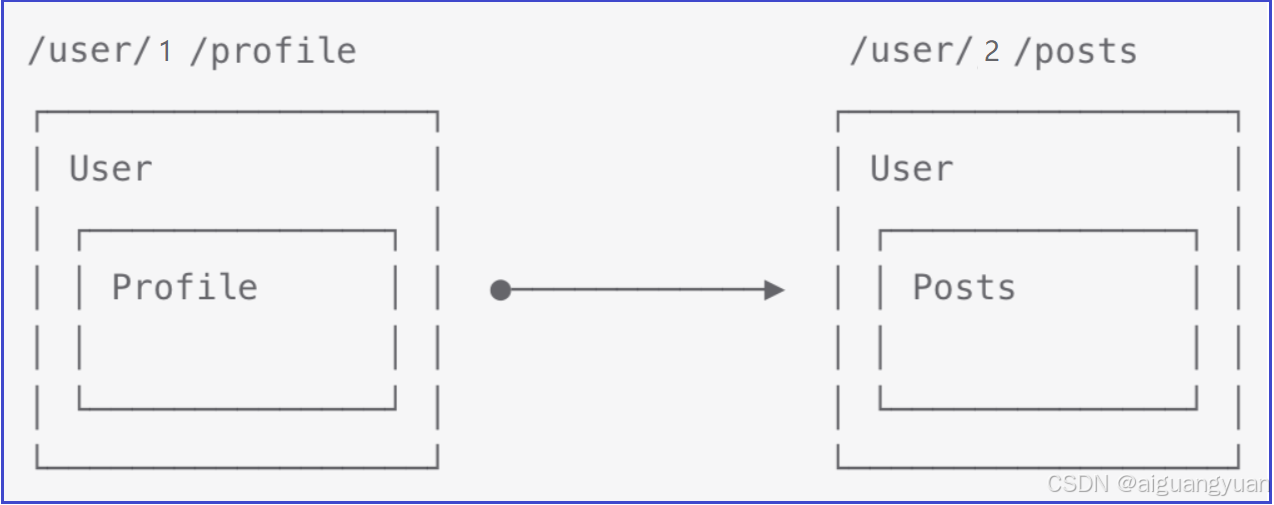
Vue-Router 基础使用
Vue Router 是 Vue 官方的客户端路由解决方案。 客户端路由的作用是在单页应用 SPA 中将浏览器的 URL 和用户看到的内容绑定起来。当用户在应用中浏览不同页面时,URL 会随之更新,但页面不需要从服务器重新加载。 Vue Router 基于 Vue 的组件系统构建&a…...
【案例分享】蓝牙红外线影音遥控键盘:瑞昱RTL8752CJF
蓝牙红外线影音遥控键盘 Remotec的无线控制键盘采用瑞昱蓝牙RTL8752CJF解决方案,透过蓝牙5.0与手机配对后,连线至 Remotec 红外 code server 取得对应影音视觉设备的红外 code后,即可控制多达2个以上的影音视觉设备,像是智能电视…...

利用SQL批量修改Nacos配置
在Nacos的应用场景中,配置信息的管理至关重要。当需要对特定的配置进行批量修改时,SQL能成为我们强大的助力工具。本文将围绕如何使用SQL语句,依据特定条件修改Nacos的config_info表配置展开讲解。 一、操作前置准备 1. 数据备份 在对conf…...
网络协议的原理及应用层
网络协议 网络协议目的为了减少通信成本,所有的网络问题都是传输距离变长的问题。 协议的概念:用计算机语言来发出不同的信号,信号代表不同的含义,这就是通信双方的共识,便就是协议。 协议分层(语言层和…...
Express教程【003】:Express获取查询参数
文章目录 3、获取URL中携带的查询参数3.1 参数形式:查询字符串3.2 参数形式:动态参数3.3 参数形式:Json数据 3、获取URL中携带的查询参数 3.1 参数形式:查询字符串 1️⃣通过req.query对象,可以访问到客户端通过查询…...

Android开发常用Kotlin高级语法
一、扩展函数与扩展属性:为系统类 “量身定制” 工具方法 Kotlin 的扩展机制允许为现有类(包括 Java 类)添加新功能,无需继承或修改原类。这在 Android 开发中尤其适合封装高频重复操作(如 View 操作、上下文获取&…...
输入ifconfig,发现ens33不见了,无法连接至虚拟机
输入ifconfig,发现ens33不见了,无法连接至虚拟机 输入ifconfig,发现ens33不见了,无法连接至虚拟机 输入ifconfig,发现ens33不见了,无法连接至虚拟机 当输入ifconfig,发现少了ens33,无…...

Android Stdio 编译 文件生成,以及Gradle
一、生成调试版 APK(无需签名) 适用于测试阶段,可直接安装到模拟器或真机调试。 编译项目 确保项目无错误(菜单栏 → Build → Make Project 或按 Ctrl F9)。 生成 APK 点击菜单栏 Build → Generate App Bundles o…...

前端面试准备-4
1.React Router的history模式中,push和replace有什么区别 都是用于页面导航,但是他们对浏览器历史记录的处理不一样。 ①:push是在浏览历史栈里加入一条新的浏览历史,点击返回键会返回上一个页面 ②;replace是替换当前历史记录…...

AI赋能金融风控:基于机器学习的智能欺诈检测系统实战教程
引言 在数字化转型浪潮中,金融欺诈手段呈现智能化、隐蔽化趋势。传统规则引擎已难以应对复杂多变的欺诈模式,而机器学习技术通过自动学习数据特征,正在重塑金融风控体系。本文将基于Python生态,以信用卡欺诈检测为切入点…...

Java虚拟机内存区域划分
Java虚拟机内存区域划分 Java虚拟机(JVM)的内存区域划分主要分为五个部分: 程序计数器:程序计数寄存器,给CPU使用本地方法栈:为JVM使用到的Native方法服务方法区:存储的是编译后的.class文件堆…...

如何下载python的第三方类库
无论是在cmd中(使用python环境),还是在Anaconda Prompt中(使用虚拟环境),都可以通过pip命令进行下载python的第三方类库。 pip install packagename --default-timeout600 -i https://mirrors.tuna.tsingh…...

Redis击穿,穿透和雪崩详解以及解决方案
在 Java 开发中,Redis 作为常用的缓存中间件,可能会面临击穿、穿透、雪崩这三类经典问题。以下是对这三个问题的详细解析及对应的 Java 解决方案: 一、Redis 缓存击穿(Cache Breakdown) 问题描述 定义:大…...
网络渗透基础:信息收集
1.信息收集 whois xx.com 域名注册信息 注册人、电话、email Whois.chinaz.com kali自带whois工具 域名备案信息 Beian.miit.gov.cn Tianyancha.com Icp.chinaz.com 爱站 Sou.xiaolanben.com 2.子域名收集 收集方式 枚举:基于字典搜索引擎:googleh…...
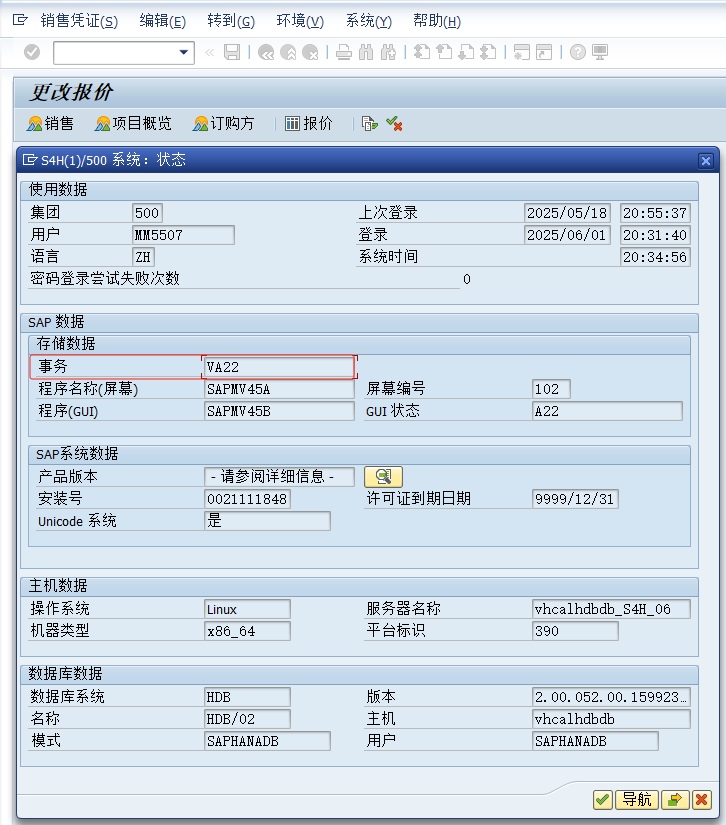
[SAP] 如何查询当前屏幕的Tcode?
事务代码Tcode是SAP中到达特定屏幕的快捷路径 如何查询以下屏幕的事务码Tcode? 要浏览当前所使用的屏幕的事务码,可以选择System | Status 这里的事务代码是[VA22],它是Change Quotation的事务代码...
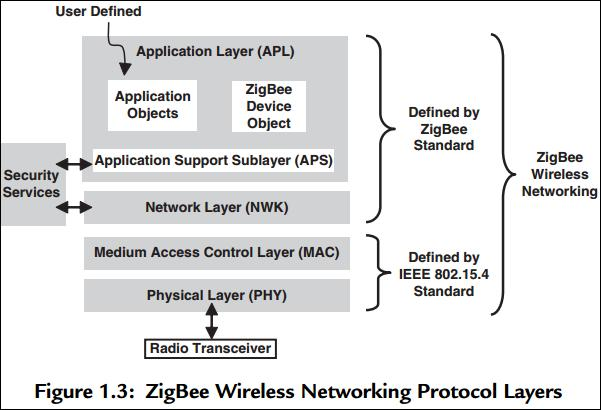
ZigBee 协议:开启物联网低功耗通信新时代
在物联网蓬勃发展的时代,无线通信技术犹如连接万物的桥梁,而 ZigBee 协议以其独特的优势,在众多通信协议中脱颖而出,成为构建低功耗、可靠物联网网络的关键技术之一。 一、ZigBee 协议的起源与发展 ZigBee 这个名字充满了自然的灵…...
JavaScript 模块系统:CJS/AMD/UMD/ESM
文章目录 前言一、CommonJS (CJS) - Node.js 的同步模块系统1.1 设计背景1.2 浏览器兼容性问题1.3 Webpack 如何转换 CJS1.4 适用场景 二、AMD (Asynchronous Module Definition) - 浏览器异步加载方案2.1 设计背景2.2 为什么现代浏览器不原生支持 AMD2.3 Webpack/Rollup 如何处…...
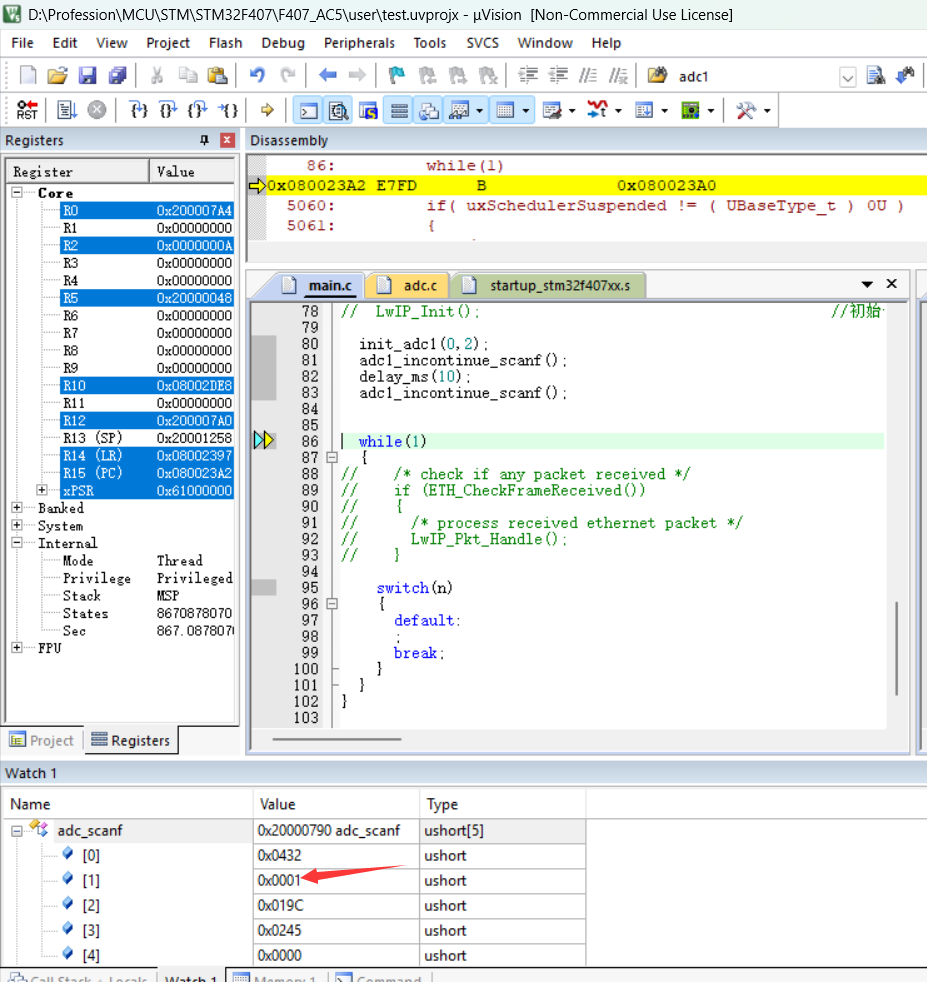
STM32F407寄存器操作(ADC非连续扫描模式)
1.前言 书接上回,在看手册的时候我突然发现手册上还描述了另一种ADC扫描模式,即非连续扫描模式,想着连续扫描模式都已经探索过了,那就顺手把非非连续模式研究一下吧。 2.理论 我们先看看手册,这里我就以规则通道举例…...