嵌入式学习--江协stm32day1
失踪人口回归了,stm32的学习比起51要慢一些,因为涉及插线,可能存在漏插,不牢固等问题。
相对于51直接对寄存器的设置,stm32因为是32位修改起来比较麻烦,江协课程是基于标准库的,是对封装函数进行操作,这要求我们对于模块的使用在开始就规划好。
GPIO通用输入输出口
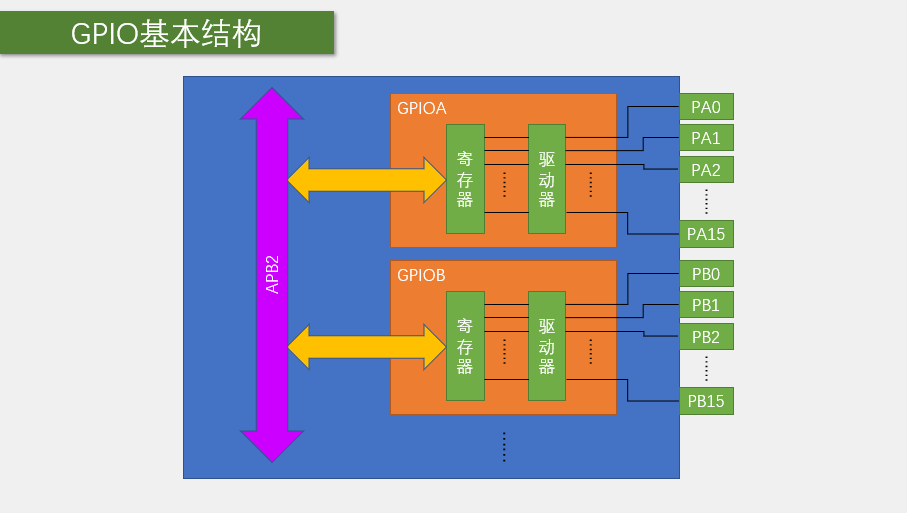
APB2是外设总线
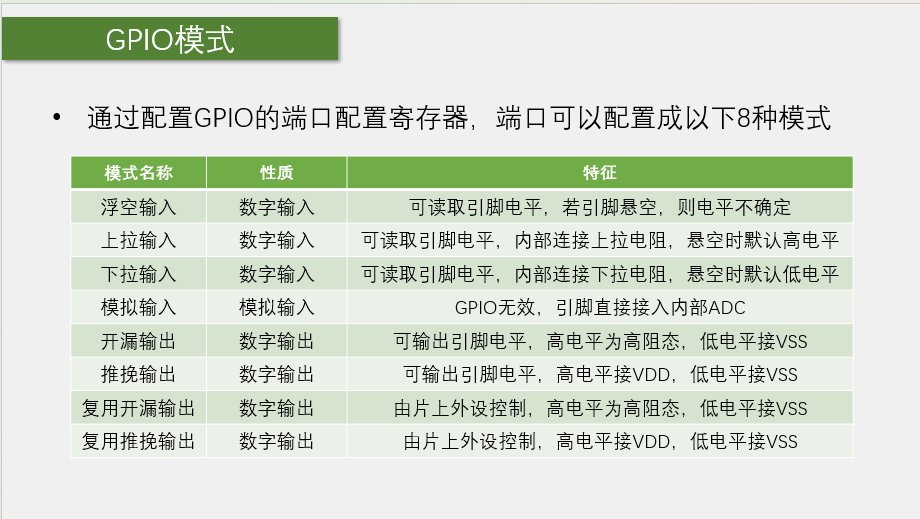
输入模式
- 浮空输入
- 原理:GPIO 端口无内部上拉或下拉电阻,电平状态完全由外部输入决定,引脚悬空时电平不确定。
- 使用场景:用于串口通信接收端(如 UART、USART 的 RX 引脚 ),接收外部设备电平变化信号;检测有稳定高低电平的外部传感器信号(如霍尔、红外传感器 );外部中断信号输入检测;数字输入信号检测。
- 特点:能真实反映外部电平,但易受干扰,引脚悬空时读数无参考意义。
- 上拉输入
- 原理:内部连接上拉电阻,无外部输入信号时,GPIO 端口保持高电平。
- 使用场景:机械按键或拨动开关输入,未按下时为高电平,按下接地变低电平;IIC 通信 SDA 引脚,保证总线数据传输默认高电平;SPI 通信从设备选择引脚(NSS),无信号时保持高,主设备选择时拉低 ;继电器状态等开关量信号输入检测;电源检测引脚,检测电源供电状态。
- 特点:确保无外部信号时输入为高电平,增强信号稳定性,防信号漂移。
- 下拉输入
- 原理:内部连接下拉电阻,无外部输入信号时,GPIO 端口保持低电平。
- 使用场景:CAN_RX 引脚接收 CAN 总线信号,确保总线无信号时引脚低电平;按钮接地触发的按键输入,未按下时低电平,按下拉高 ;默认低电平的数字电路信号输入;下拉电阻保持低电平的光电开关等传感器输入;检测外部设备低电平状态的电路。
- 特点:确保无外部信号时输入为低电平,适用于外部信号常态为高的检测场景。
- 模拟输入
- 原理:输入信号不经施密特触发器处理,直接接入内部 ADC,将模拟信号转为数字信号。
- 使用场景:连接温度、光照、湿度、气压等模拟传感器采集信号;电池电压检测;电流检测(通过分流电阻和运算放大器转换为电压信号 );光强检测等。
- 特点:用于采集连续变化的模拟量,供 MCU 处理分析。
输出模式
- 推挽输出
- 原理:由两个互补晶体管组成,可输出高电平(接 VDD )和低电平(接 VSS ),能向负载灌电流或抽取电流,导通损耗小、效率高。
- 使用场景:驱动 LED、继电器、蜂鸣器;控制小型直流电机;SPI 通信的 SCK、MOSI、MISO 等需强电平信号的总线通信引脚;各类状态指示灯控制。
- 特点:驱动能力强,可快速切换高低电平,适合直接驱动数字负载。
- 开漏输出
- 原理:输出端类似三极管集电极,只能输出低电平(接 VSS ),输出高电平时为高阻态,需外部上拉电阻拉高。
- 使用场景:IIC 总线通信的 SCL 和 SDA 引脚;多设备共享数据线的通信总线;GPIO 中断信号输出(通过外部上拉电阻共享中断信号线 );不同电压域电源管理切换电路;电平转换(适配不同电压器件 )。
- 特点:可实现线与逻辑,方便电平匹配,适合多设备通信及跨电压域应用,但高电平需外部上拉。
- 复用推挽输出
- 原理:GPIO 端口由片上外设控制,如定时器 PWM 输出、SPI 的 MOSI 和 MISO 等,兼具推挽输出特性,能主动提供电流驱动负载。
- 使用场景:UART 通信发送端(TX 引脚 );SPI 通信的时钟线(SCK)、主输出从输入(MOSI)、主输入从输出(MISO)引脚 ;CAN 通信发送端(TX 引脚 );伺服电机或 DC 电机控制的 PWM 信号输出;外部设备的时钟、使能等控制信号输出。
- 特点:用于特定外设功能,借助推挽输出特性提供稳定驱动。
- 复用开漏输出
- 原理:GPIO 端口由片上外设控制,输出模式为开漏输出,高电平需外部或内部上拉电阻,可实现线与逻辑。
- 使用场景:IIC 通信的 SDA 和 SCL 引脚(多设备共享 );SMBus 通信(类似 IIC 协议 );1 - Wire 单总线通信;MCU 接收多个外设中断信号(避免电平冲突 );电源管理信号(控制电压域转换 )。
- 特点:适用于特定外设多设备共享总线通信,需外部上拉电阻配合,可解决电平冲突问题。
这里只需要大概了解一下即可,后面结合具体外设理解
GPIO在后面会频繁使用,我们要熟悉使用流程
1.配置时钟2.初始化结构体
GPIO输出
以LED介绍GPIO的使用
#include "stm32f10x.h" // Device header
void LED_Init()
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1|GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_SetBits(GPIOA,GPIO_Pin_1|GPIO_Pin_2);
}
void LED1_ON()
{GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
void LED1_OFF()
{GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
void LED1_Turn()
{if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_1)==0){GPIO_SetBits(GPIOA,GPIO_Pin_1);}else{GPIO_ResetBits(GPIOA,GPIO_Pin_1);}
}LED闪烁
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟//使用各个外设前必须开启时钟,否则对外设的操作无效/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引脚,赋值为第0号引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数//函数内部会自动根据结构体的参数配置相应寄存器//实现GPIOA的初始化/*主循环,循环体内的代码会一直循环执行*/while (1){/*设置PA0引脚的高低电平,实现LED闪烁,下面展示3种方法*//*方法1:GPIO_ResetBits设置低电平,GPIO_SetBits设置高电平*/GPIO_ResetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_SetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms/*方法2:GPIO_WriteBit设置低/高电平,由Bit_RESET/Bit_SET指定*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms/*方法3:GPIO_WriteBit设置低/高电平,由数据0/1指定,数据需要强转为BitAction类型*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms}
}
LED流水灯
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟//使用各个外设前必须开启时钟,否则对外设的操作无效/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //GPIO引脚,赋值为所有引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数//函数内部会自动根据结构体的参数配置相应寄存器//实现GPIOA的初始化/*主循环,循环体内的代码会一直循环执行*/while (1){/*使用GPIO_Write,同时设置GPIOA所有引脚的高低电平,实现LED流水灯*/GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001,PA0引脚为低电平,其他引脚均为高电平,注意数据有按位取反Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010,PA1引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100,PA2引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000,PA3引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000,PA4引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000,PA5引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000,PA6引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100msGPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000,PA7引脚为低电平,其他引脚均为高电平Delay_ms(100); //延时100ms}
}
蜂鸣器
这个是有源蜂鸣器 ,没法唱天空之城,差评
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟//使用各个外设前必须开启时钟,否则对外设的操作无效/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //GPIO引脚,赋值为第12号引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数//函数内部会自动根据结构体的参数配置相应寄存器//实现GPIOB的初始化/*主循环,循环体内的代码会一直循环执行*/while (1){GPIO_ResetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为低电平,蜂鸣器鸣叫Delay_ms(100); //延时100msGPIO_SetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为高电平,蜂鸣器停止Delay_ms(100); //延时100msGPIO_ResetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为低电平,蜂鸣器鸣叫Delay_ms(100); //延时100msGPIO_SetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为高电平,蜂鸣器停止Delay_ms(700); //延时700ms}
}
GPIO输入
按键控制LED
IPU为上拉输入(这里还没学定时器,还是用delay消抖)
#include "stm32f10x.h" // Device header
#include "Delay.h"/*** 函 数:按键初始化* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入
}/*** 函 数:按键获取键码* 参 数:无* 返 回 值:按下按键的键码值,范围:0~2,返回0代表没有按键按下* 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手*/
uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0; //定义变量,默认键码值为0if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下{Delay_ms(20); //延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //等待按键松手Delay_ms(20); //延时消抖KeyNum = 1; //置键码为1}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) //读PB11输入寄存器的状态,如果为0,则代表按键2按下{Delay_ms(20); //延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0); //等待按键松手Delay_ms(20); //延时消抖KeyNum = 2; //置键码为2}return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0
}
光敏电阻控制蜂鸣器
也是化身电报专家了
#include "stm32f10x.h" // Device header/*** 函 数:光敏传感器初始化* 参 数:无* 返 回 值:无*/
void LightSensor_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB13引脚初始化为上拉输入
}/*** 函 数:获取当前光敏传感器输出的高低电平* 参 数:无* 返 回 值:光敏传感器输出的高低电平,范围:0/1*/
uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //返回PB13输入寄存器的状态
}
学习stm32过程中,感觉自己真的要成为工程师了,cv工程师(bushi)。在使用外设前,要先去函数库找到需要使用的函数,然后一个个复制过去,然后再去查看函数的定义,配置里面的参数,需要逻辑的大多都是在主函数里面写(也有可能是入门学习的原因)
今日语录:打不倒我的,只会让我更加强大(农p无疑了)
相关文章:
嵌入式学习--江协stm32day1
失踪人口回归了,stm32的学习比起51要慢一些,因为涉及插线,可能存在漏插,不牢固等问题。 相对于51直接对寄存器的设置,stm32因为是32位修改起来比较麻烦,江协课程是基于标准库的,是对封装函数进…...

湖北理元理律师事务所:债务化解中的心理重建与法律护航
专业法律顾问视角 一、债务危机的双重属性:法律问题与心理困境 在对173名债务人的调研中发现: 68%存在焦虑引发的决策障碍(如不敢接听银行电话) 42%因羞耻感隐瞒债务导致雪球效应 湖北理元理律师事务所创新采用法律-心理双轨…...

constexpr 是 C++11 引入的关键字
constexpr 是 C11 引入的关键字,用于在编译期进行常量表达式计算,从而提高程序性能和安全性。以下是其核心作用和用法: 一.作用 1编译期 计算 constexpr 变量或函数的值在编译时确定,避免运行时计算开销。例如,数组大…...
【更新中】(文档+代码)基于推荐算法和Springboot+Vue的购物商城
概要设计 本节规划和定义了Woodnet桌游电商平台的软件概要设计说明书,描述了软件的总体设计、接口设计、运行设计、系统数据库结构设计以及系统出错处理设计,从整体上说明了系统设计的结构层次、处理流程、系统用例等。 本系统是一个独立的系统&#x…...
六种高阶微分方程的特解(原创:daode3056)
高阶微分方程的通解是指包含所有可能解的解的表达式。对于一个 n 阶微分方程,其通解通常包含 n 个任意常数。这些任意常数可以通过初始条件或边界条件来确定。高阶微分方程的特解是指在通解中,特定地选择了一组常数,使得解满足给定的初始条件…...

【C++11(上)】—— 我与C++的不解之缘(三十)
一、C11 这里简单了解一下C发展好吧: C11是C的第二个大版本,也是自C98以来最重要的一个版本。 它引入了大量的更改,它曾被人们称为C0x,因为它被期待在2010年之前发布;但在2011年8月12日才被采纳。 C03到C11花了8年时间…...
【多线程初阶】wait() notify()
文章目录 协调多个线程间的执行顺序join 和 wait 区别sleep 和 wait 区别 wait()方法线程饿死调用 wait()唤醒 wait() notify()方法wait() 和 notify() 需对同一对象使用确保先 wait ,后 notify多个线程在同一对象上wait notify随机唤醒一个wait notifyAll()方法应用 wait() 和…...
安全-JAVA开发-第二天
Web资源访问的流程 由此可见 客户访问JAVA开发的应用时 会先通过 监听器(Listener)和 过滤器(Filter) 今天简单的了解下这两个模块的开发过程 监听器(Listener) 主要是监听 我们触发了什么行为 并进行反应…...

Python基础:文件简单操作
🍃引言 手把手带你快速上手Python Python基础专栏 一、🍃文件是什么 变量是把数据保存到内存中. 如果程序重启/主机重启, 内存中的数据就会丢失。 要想能让数据被持久化存储, 就可以把数据存储到硬盘中. 也就是在文件中保存。 通过文件的后缀名, 可以看…...

深度学习项目之RT-DETR训练自己数据集
RT-DETR 1.模型介绍📌 什么是 RT-DETR ?📖 核心改进点📊 结构示意🎯 RT-DETR 优势⚠️ RT-DETR 缺点📈 应用场景📑 论文 & 官方仓库2.模型框架3.Yaml配置文件4.训练脚本5.训练完成截图6.总结…...
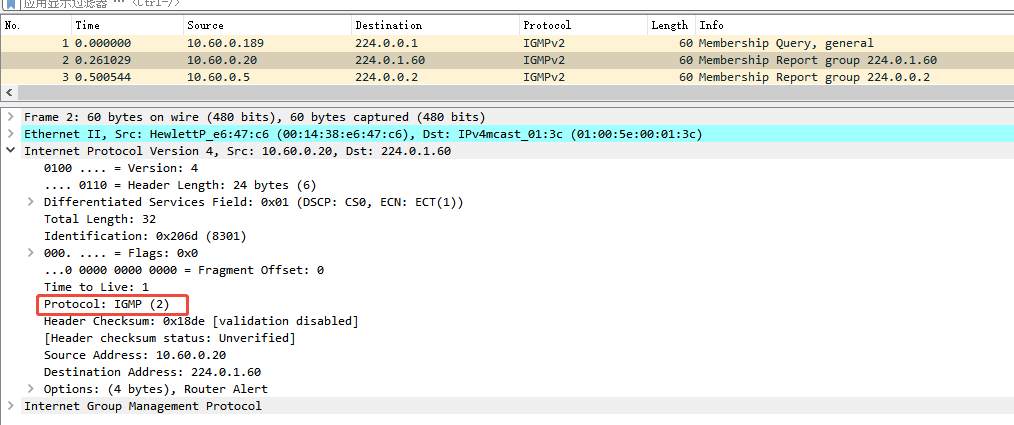
以太网帧结构和封装【二】-- IP头部信息
1字节 byte 8比特 bit 【位和比特是同一个概念】 比特/位,字节之间的关系是: 位(Bit) 中文名:位(二进制位)。 英文名:Bit(Binary Digit 的缩写)。 含义&…...
)
mysql 悲观锁和乐观锁(—悲观锁)
适合悲观锁的使用场景: 悲观锁更适合在,写操作较多、并发冲突高、业务需要强一致性等场景下使用悲观锁。 如何使用悲观锁: 悲观锁主要通过以下两个 SQL语句实现: 1、SELECT...FOR UPDATE; 这个语句会在所查询中的数据行上设置排…...
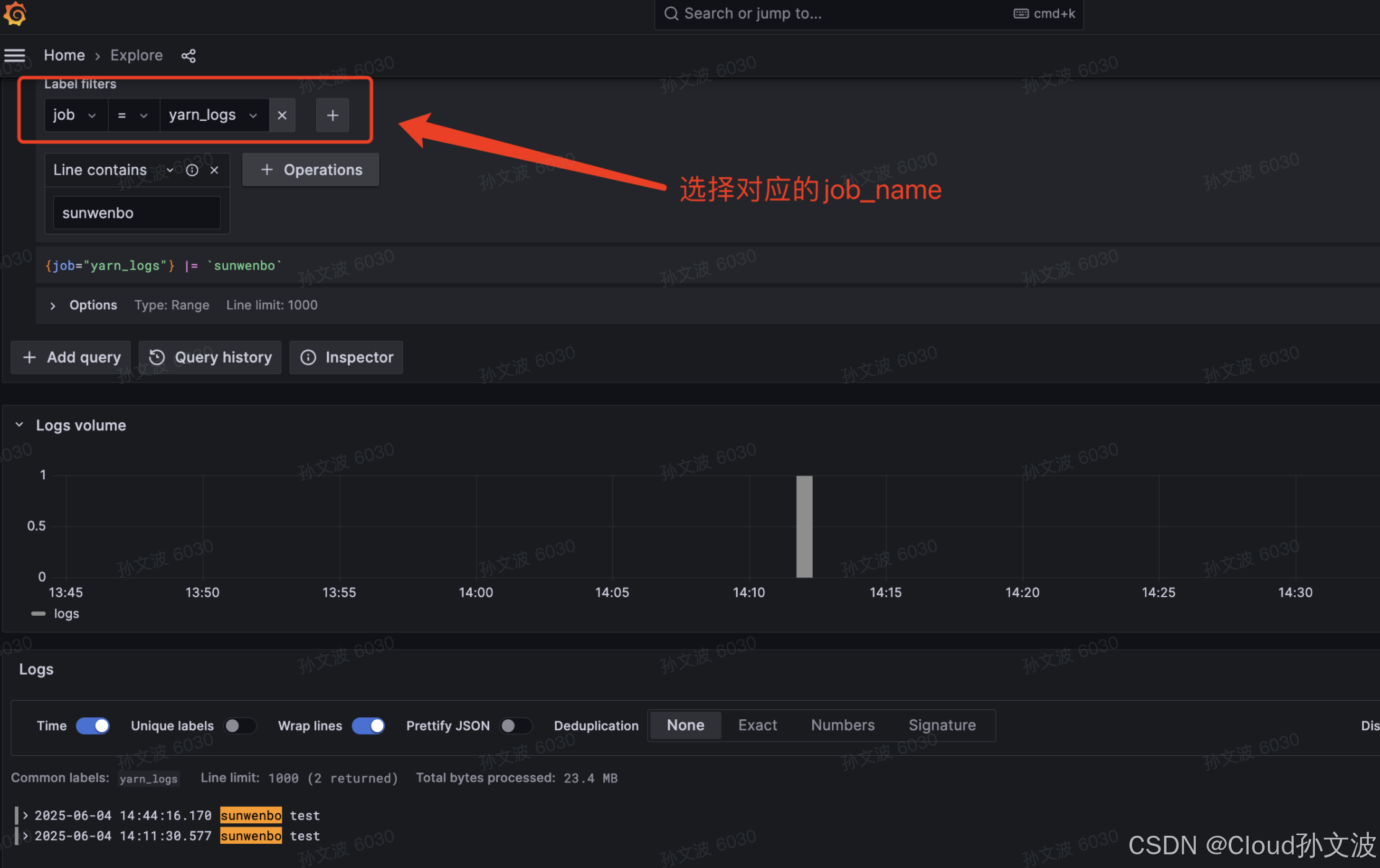
Promtail采集服务器本地日志存储到Loki
✅ 一、前提条件 已安装 Loki 服务 日志文件目录可访问(如 /var/log) 具备 sudo 权限 🧩 二、下载 Promtail 二进制文件 # 替换为你想要的版本 VERSION"3.5.1"# 创建目录 sudo mkdir -p /opt/promtail cd /opt/promtail# 下载并…...

python第31天打卡
import numpy as np from tensorflow import keras from tensorflow.keras import layers, optimizers, utils, datasets# 数据加载和预处理函数 def load_and_preprocess_data():(x_train, y_train), (x_test, y_test) datasets.mnist.load_data()# 重塑并归一化图像数据x_tr…...

4.1 HarmonyOS NEXT原生AI能力集成:盘古大模型端侧部署与多模态交互实战
HarmonyOS NEXT原生AI能力集成:盘古大模型端侧部署与多模态交互实战 在HarmonyOS NEXT的全场景生态中,原生AI能力成为连接设备、服务与用户的核心纽带。通过盘古大模型端侧轻量化部署、多模态交互技术及环境感知系统,开发者能够构建"主…...

学习STC51单片机27(芯片为STC89C52RCRC)
每日一言 你读过的书、走过的路、流过的汗,终将成就独一无二的你。 硬件:LCD1602液晶显示 非标协议外设 概述 LCD1602(Liquid Crystal Display)是一种工业字符型液晶,能够同时显示 1602 即 32 字符(16列两行) 那我…...
)
PAT-甲级JAVA题解(更新中...)
使用JAVA语言进行算法练习,但是有些会出现运行超时情况. 题目链接A1001A1001-PAT甲级JAVA题解 AB FormatA1005A1005-PAT甲级JAVA题解 Spell It RightA1006A1006-PAT甲级JAVA题解 Sign In and Sign OutA1011A1011-PAT甲级JAVA题解World Cup BettingA1012A1012 PAT甲级JAVA题解 …...

Deep Chat:重塑人机对话边界的开源智能对话框架—— 让下一代AI交互无缝融入你的应用
在AI助手泛滥的今天,开发体验碎片化、功能扩展性差、多模态支持不足成为行业痛点。由开发者Ovidijus Parsiunas发起的开源项目 Deep Chat(https://github.com/OvidijusParsiunas/deep-chat),正以模块化设计 全栈兼容性颠覆传统聊…...
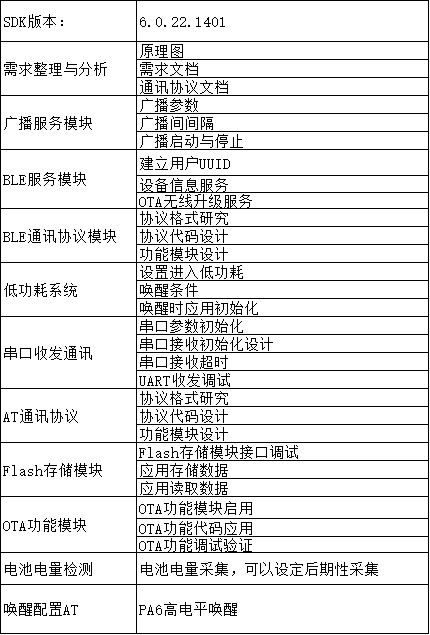
DA14531_beacon_大小信标设备开发
蓝牙信标是一款通过广播指定蓝牙信号,实现信标信号扫描、识别和获得辅助信息的电子产品。 不同品名的蓝牙信标采用相同的 UUID 和广播信号格式,但在 MAC 地址、工作寿命、体积和广播周期上有所差异。 小武编程巧用DA14531开发一款蓝牙信标....
【算法训练营Day06】哈希表part2
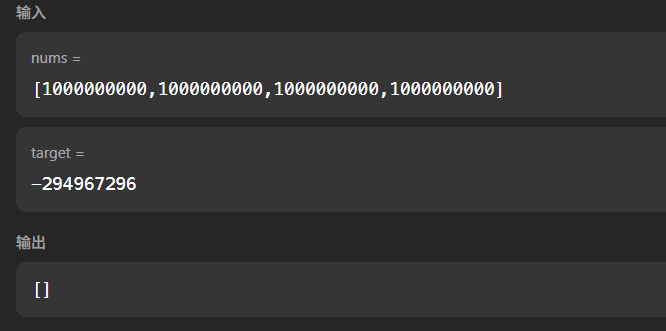
文章目录 四数相加赎金信三数之和四数之和 四数相加 题目链接:454. 四数相加 II 这个题注意它只需要给出次数,而不是元组。所以我们可以分治。将前两个数组的加和情况使用map存储起来,再将后两个数组的加和情况使用map存储起来,ke…...

Word双栏英文论文排版攻略
word写双栏英文论文的注意事项 排版首先改字体添加连字符还没完呢有时候设置了两端对齐会出现这样的情况: 公式文献 等我下学期有时间了,一定要学习Latex啊,word写英文论文,不论是排版还是公式都很麻烦的,而Latex一键就…...
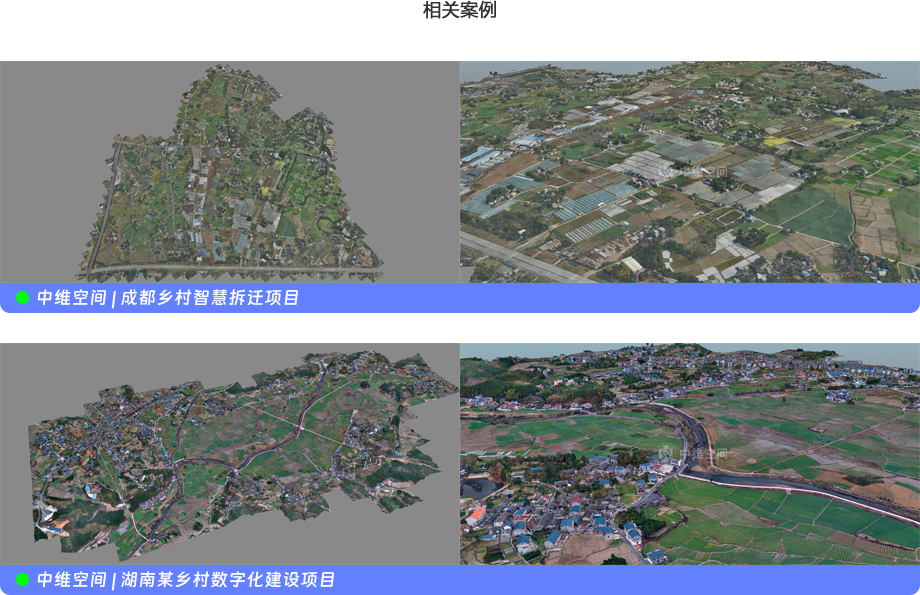
乡村三维建模 | 江苏农田无人机建模案例
测绘是农田建设的基础工作,测绘的质量和效率直接影响农田建设的进度和成果。传统的人工测量、地面测量等测绘手段,存在效率低、精度差、受环境影响大、成本高等缺点,难以满足高标准农田建设的要求。而无人机倾斜摄影技术具有高效、精确、灵活…...

2025 5 月 学习笔记
计算高斯半径,用于生成高斯热图 这个的意义是什么 有什么作用? 14 核心意义:平衡定位精度与检测鲁棒性 在基于热图的目标检测方法(如CenterNet、CornerNet等)中,计算高斯半径的核心意义在于在精确…...
SpringBoot(七) --- Redis基础
目录 前言 一、Redis入门 二、Redis常用数据类型 三、Redis常用命令 1. 字符串操作命令 2. 哈希操作命令 3. 列表操作命令 4. 集合操作命令 5. 有序集合操作命令 6.通用命令 四、在Java中操作Redis 前言 Redis是一个基于内存的key-value结构数据库,有以下…...

Oracle 故障实例 - 通过备份恢复到某时间点 故障恢复
一、环境和故障描述 1.数据库版本:oracle 11g , linux ;OA系统的后台数据库。 2. 同事在做正式机数据迁移到测试机时,不小心删除了正式机的数据。 导致大量生产数据丢失,系统故障。 3.万幸的是正式机每日都做了数据备份&#x…...

滑动智能降级:Glide优化加载性能的黑科技
简介 在移动应用开发中,图片加载性能直接关系到用户体验,尤其在列表快速滑动场景下,如何平衡流畅度与流量消耗成为开发者面临的核心挑战。本文将深入探讨Glide库的智能降级技术,通过滑动速度动态调整图片加载策略,实现流量节省35%、首屏加载速度提升40%的显著效果。我们将…...

【前端并发请求控制:必要性与实现策略】
前端并发请求控制:必要性与实现策略 一、引言 在现代 Web 开发中,处理大量异步请求是一个常见场景。虽然浏览器和服务器都有其并发限制机制,但前端实现并发控制仍然具有其独特的价值和必要性。本文将深入探讨这个话题。 二、现有的并发限制…...
 - 动态规划深度解析)
LeetCode 139. 单词拆分(Word Break) - 动态规划深度解析
文章目录 问题描述动态规划解法解法核心思路完整代码实现关键代码解析1. 数据结构初始化2. 动态规划数组3. 核心循环逻辑4. 子串区间理解(关键)示例演算复杂度分析算法优化点总结本文详细解析LeetCode 139题"单词拆分"的动态规划解法,涵盖核心思路、代码实现、区间…...

@Prometheus动态配置管理-ConsulConfd
文章目录 动态配置管理 Consul Confd**一、目标****二、架构组件****三、环境准备****四、配置 Consul**1. 注册监控目标(服务发现)2. 存储告警规则(KV 存储) **五、配置 Confd**1. 监控目标模板配置2. 告警规则模板配置 **六、配…...

CentOS7 + JDK8 虚拟机安装与 Hadoop + Spark 集群搭建实践
前言 在大数据时代,Hadoop 和 Spark 是两种非常重要的分布式计算框架。本文将详细介绍如何在 CentOS7 JDK8 的虚拟机环境中搭建 Hadoop Spark 分布式集群,包括 Spark Standalone 和 Hadoop Spark on YARN 两种模式,并提供具体的代码示例。…...