新松机械臂 2001端口服务的客户端例程
初级代码游戏的专栏介绍与文章目录-CSDN博客
我的github:codetoys,所有代码都将会位于ctfc库中。已经放入库中我会指出在库中的位置。
这些代码大部分以Linux为目标但部分代码是纯C++的,可以在任何平台上使用。
源码指引:github源码指引_初级代码游戏的博客-CSDN博客
C#是我多年以来的业余爱好,新搞的东西能用C#的就用C#了。
新松机械臂报告状态的端口是2001,每100毫秒报告一次状态,每次报告数据长度1468字节。
这个端口只用来报告状态,控制则使用2000端口。
获取状态非常简单,连接上去,读取数据,按照格式拆分数据即可。具体数据数据格式见开发手册。
目录
一、C++头文件
二、main函数
三、核心代码
四、运行
一、C++头文件
只需要使用C++头文件DucoRobat.h即可。其实并不需要这个头文件,本例程中引入是因为借用了里面定义好的状态结构而已:
// 机器人相关信息
struct RobotStatusList
{std::vector<double> jointExpectPosition; // 目标关节位置std::vector<double> jointExpectVelocity; // 目标角速度std::vector<double> jointExpectAccelera; // 目标角加速度std::vector<double> jointActualPosition; // 实际关节位置std::vector<double> jointActualVelocity; // 实际角速度std::vector<double> jointActualAccelera; // 实际角加速度std::vector<double> jointActualCurrent; // 实际关节电流std::vector<double> jointTemperature; // 时间关节温度std::vector<double> driverTemperature; // 未使用std::vector<double> cartExpectPosition; // 目标末端位姿std::vector<double> cartExpectVelocity; // 目标末端速度std::vector<double> cartExpectAccelera; // 目标末端加速度std::vector<double> cartActualPosition; // 实际末端位姿std::vector<double> cartActualVelocity; // 实际末端速度std::vector<double> cartActualAccelera; // 实际末端加速度std::vector<bool> slaveReady; // 从站状态bool collision; // 是否发生碰撞int8_t collisionAxis; // 发生碰撞的关节bool emcStopSignal; // 未使用int8_t robotState; // 机器人状态int32_t robotError; // 机器人错误码
};
二、main函数
int main(int argc, char** argv)
{if (!InitActiveApp("DOUCO", 1024 * 1024 * 10, argc, argv))return 1;thelog << "新松机器人 TCP及IP接口" << endi;WORD sockVersion = MAKEWORD(1, 1);WSADATA wsaData;if (WSAStartup(sockVersion, &wsaData) != 0){return 0;}bool bExitCmd = false;thread t(CMyDUCO::VirtualServer, &bExitCmd);//模拟服务SleepSeconds(1);CMyDUCO myduco;string ip = "127.0.0.1";//正式使用修改为设备实际IPthelog << "连接 " << ip << " ......"<< endi;if (!myduco.Recv(ip.c_str())){thelog << "连接到 " << ip << " 失败" << ende;}else{myduco.ProcessFrame();myduco.Print();myduco.Save();}while (true)SleepSeconds(5);bExitCmd = true;t.join();WSACleanup();return 0;
}
这个代码默认访问自带的模拟服务,实际使用修改目标IP(代码中已标注)。
三、核心代码
// DUCO.h : 新松机器人 TCP及IP接口
//#include <iostream>
//#include "DucoCobot.h"
//using namespace DucoRPC;
using namespace std;
#include "env/myUtil.h"
#include "function/htmldoc.h"
#include "function/mysocket.h"
using namespace ns_my_std;#pragma comment(lib,"ws2_32.lib")
// 机器人相关信息
struct RobotStatusList
{std::vector<double> jointExpectPosition; // 目标关节位置std::vector<double> jointExpectVelocity; // 目标角速度std::vector<double> jointExpectAccelera; // 目标角加速度std::vector<double> jointActualPosition; // 实际关节位置std::vector<double> jointActualVelocity; // 实际角速度std::vector<double> jointActualAccelera; // 实际角加速度std::vector<double> jointActualCurrent; // 实际关节电流std::vector<double> jointTemperature; // 时间关节温度std::vector<double> driverTemperature; // 未使用std::vector<double> cartExpectPosition; // 目标末端位姿std::vector<double> cartExpectVelocity; // 目标末端速度std::vector<double> cartExpectAccelera; // 目标末端加速度std::vector<double> cartActualPosition; // 实际末端位姿std::vector<double> cartActualVelocity; // 实际末端速度std::vector<double> cartActualAccelera; // 实际末端加速度std::vector<bool> slaveReady; // 从站状态bool collision; // 是否发生碰撞int8_t collisionAxis; // 发生碰撞的关节bool emcStopSignal; // 未使用int8_t robotState; // 机器人状态int32_t robotError; // 机器人错误码
};constexpr int frame_size = 1468;
class CMyDUCO
{
private:int32_t _getUInt(int byte_pos){if (4 != sizeof(int32_t))throw "4 != sizeof(int32_t)";int32_t tmp;memcpy(&tmp, frame + byte_pos, sizeof(int32_t));return tmp;}float _getFloat(int byte_pos){if (4 != sizeof(float))throw "4 != sizeof(float)";float tmp;memcpy(&tmp, frame + byte_pos, sizeof(float));return tmp;}void _FloatX(vector<double>& vd7, int count, int byte_pos){vd7.clear();for (int i = 0; i < count; ++i){vd7.push_back(_getFloat(byte_pos + i * 4));}}union{char frame[frame_size];float _;}m_frame;char* frame = m_frame.frame;RobotStatusList m_RobotStatusList;
public:bool Save(){CEasyFile file;for (int i = 0; i < 100; ++i){char buf[256];sprintf(buf, "data%03d.dat", i);if (file.IsFileExist(buf))continue;return file.WriteFile(buf, frame, frame_size);}thelog << "已经存在的文件太多" << ende;return false;}void ProcessFrame(){// 目标关节位置_FloatX(m_RobotStatusList.jointExpectPosition, 7, 112);// 目标角速度_FloatX(m_RobotStatusList.jointExpectVelocity, 7, 140);// 目标角加速度_FloatX(m_RobotStatusList.jointExpectAccelera, 7, 168);// 实际关节位置_FloatX(m_RobotStatusList.jointActualPosition, 7, 0);// 实际角速度_FloatX(m_RobotStatusList.jointActualVelocity, 7, 28);// 实际角加速度_FloatX(m_RobotStatusList.jointActualAccelera, 7, 56);// 实际关节电流_FloatX(m_RobotStatusList.jointActualCurrent, 7, 252);// 实际关节温度_FloatX(m_RobotStatusList.jointTemperature, 7, 224);// 目标末端位姿_FloatX(m_RobotStatusList.cartExpectPosition, 6, 464);// 目标末端速度_FloatX(m_RobotStatusList.cartExpectVelocity, 6, 488);// 目标末端加速度_FloatX(m_RobotStatusList.cartExpectAccelera, 6, 512);// 实际末端位姿_FloatX(m_RobotStatusList.cartActualPosition, 6, 368);// 实际末端速度_FloatX(m_RobotStatusList.cartActualVelocity, 6, 392);// 实际末端加速度_FloatX(m_RobotStatusList.cartActualAccelera, 6, 416);// 是否发生碰撞m_RobotStatusList.collision = (1 == frame[1452]);// 发生碰撞的关节m_RobotStatusList.collisionAxis = frame[1453];// 机器人状态m_RobotStatusList.robotState = frame[1449];// 机器人错误码m_RobotStatusList.robotError = _getUInt(1456);}void Random(){static int base = 0;float* p = &m_frame._;for (int i = 0; i < frame_size / 4; ++i){p[i] = base+i;}++base;// 是否发生碰撞frame[1452] = 1;// 发生碰撞的关节frame[1453] = 6;// 机器人状态frame[1449] = 9;// 机器人错误码*(int32_t*)&frame[1456] = 10;}void _PrintV(CHtmlDoc::CHtmlTable2 &table,vector<double> & vectorD, char const* title){table.AddLine();table.AddData(title);for (auto v : vectorD){table.AddData(v, 2);}}void Print(){CHtmlDoc::CHtmlTable2 table;table.AddCol("名称");for (int i = 0; i < 7; ++i){char buf[32];sprintf(buf, "关节%d", i + 1);table.AddCol(buf, CHtmlDoc::CHtmlDoc_DATACLASS_RIGHT);}_PrintV(table, m_RobotStatusList.jointExpectPosition, "目标关节位置");_PrintV(table, m_RobotStatusList.jointExpectVelocity, "目标角速度");_PrintV(table, m_RobotStatusList.jointExpectAccelera, "目标角加速度");_PrintV(table, m_RobotStatusList.jointActualPosition, "实际关节位置");_PrintV(table, m_RobotStatusList.jointActualVelocity, "实际角速度");_PrintV(table, m_RobotStatusList.jointActualAccelera, "实际角加速度");_PrintV(table, m_RobotStatusList.jointActualCurrent, "实际关节电流");_PrintV(table, m_RobotStatusList.jointTemperature, "时间关节温度");_PrintV(table, m_RobotStatusList.driverTemperature, "未使用");_PrintV(table, m_RobotStatusList.cartExpectPosition, "目标末端位姿");_PrintV(table, m_RobotStatusList.cartExpectVelocity, "目标末端速度");_PrintV(table, m_RobotStatusList.cartExpectAccelera, "目标末端加速度");_PrintV(table, m_RobotStatusList.cartActualPosition, "实际末端位姿");_PrintV(table, m_RobotStatusList.cartActualVelocity, "实际末端速度");_PrintV(table, m_RobotStatusList.cartActualAccelera, "实际末端加速度");theLog << table.MakeTextTable() << endi;theLog << endl << m_RobotStatusList.collision << " 是否发生碰撞" << endl;theLog << (int)m_RobotStatusList.collisionAxis << " 发生碰撞的关节" << endl;theLog << (int)m_RobotStatusList.robotState << " 机器人状态" << endl;theLog << m_RobotStatusList.robotError << " 机器人错误码" << endi;}//接收数据bool Recv(char const * ip){CMySocket s;if (!s.Connect(ip, 2001)){thelog << "连接失败 "<<ip << ende;return false;}thelog << "连接成功 " << ip << endi;int count = 0;while (count != frame_size){long readCount = 0;if (!s.Recv(frame + count, frame_size - count, &readCount)){thelog << "接收失败 " << ip << ende;s.Close();return false;}thelog << readCount<<" 收到数据 " << count << endi;count += readCount;}thelog << "收到数据 " << count << endi;s.Close();return count == frame_size;}//虚拟服务static void VirtualServer(bool * pExitCmd){thelog.SetSource("TEST SERVER");CMySocket s;if (!s.Listen(2001)){thelog << "监听端口2001失败" << ende;exit(1);}thelog << "服务已创建" << endi;while (!*pExitCmd){bool tmp_bool;if (!s.IsSocketReadReady(1, tmp_bool)){thelog << "IsSocketReadReady失败" << ende;exit(1);}if (!tmp_bool)continue;CMySocket client_socket = s.Accept();if (!client_socket.IsConnected()){thelog << "Accept失败" << ende;exit(1);}thelog << "Accept成功" << endi;CMyDUCO myDUCO;myDUCO.Random();client_socket.Send(myDUCO.frame, frame_size);client_socket.Close();}s.Close();thelog << "服务结束" << endi;}
};
这个代码已经把所需的结构直接放进来了,不需要包含DucoRobat.h。
代码主要功能:
- Save 保存到当前目录
- ProcessFrame 解析收到的数据
- Random 用于模拟服务生成数据,其实并不是随机,而是递增
- Print 输出表格
- Recv 接收数据
- VirtualServer 内置模拟服务
四、运行
运行起来结果如下:
[05-30 11:13:55][应用][信息][C:\working\IoT\DUCO\main_t.cpp: 12(main)][ 0.00]新松机器人 TCP及IP接口
[05-30 11:13:55][TEST SERVER][12824- 1][信息][C:\working\IoT\DUCO\myDUCO.h: 230(VirtualServer)][ 0.02]服务已创建
[05-30 11:13:56][应用][12824][信息][C:\working\IoT\DUCO\main_t.cpp: 27(main)][ 1.01]连接 127.0.0.1 ......
[05-30 11:13:56][应用][12824][信息][C:\working\IoT\DUCO\myDUCO.h: 199(Recv)][ 1.01]连接成功 127.0.0.1
[05-30 11:13:56][TEST SERVER][12824- 1][信息][C:\working\IoT\DUCO\myDUCO.h: 247(VirtualServer)][ 1.01]Accept成功
[05-30 11:13:56][应用][12824][信息][C:\working\IoT\DUCO\myDUCO.h: 211(Recv)][ 1.01]1468 收到数据 0
[05-30 11:13:56][应用][12824][信息][C:\working\IoT\DUCO\myDUCO.h: 215(Recv)][ 1.01]收到数据 1468
[05-30 11:13:56][应用][12824][信息]
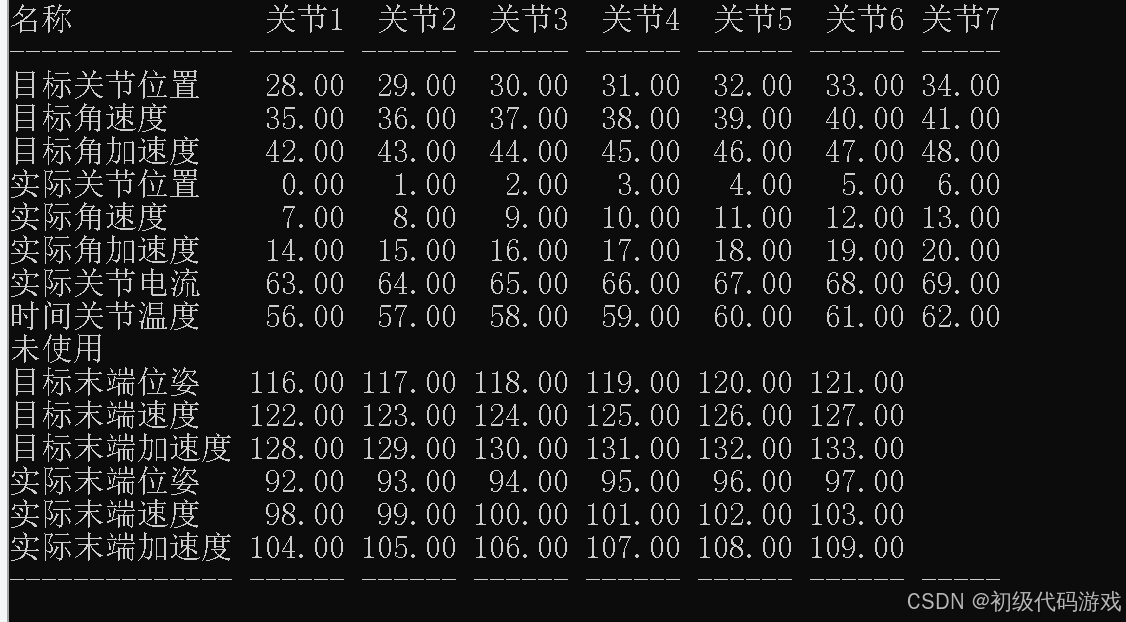
名称 关节1 关节2 关节3 关节4 关节5 关节6 关节7
-------------- ------ ------ ------ ------ ------ ------ -----
目标关节位置 28.00 29.00 30.00 31.00 32.00 33.00 34.00
目标角速度 35.00 36.00 37.00 38.00 39.00 40.00 41.00
目标角加速度 42.00 43.00 44.00 45.00 46.00 47.00 48.00
实际关节位置 0.00 1.00 2.00 3.00 4.00 5.00 6.00
实际角速度 7.00 8.00 9.00 10.00 11.00 12.00 13.00
实际角加速度 14.00 15.00 16.00 17.00 18.00 19.00 20.00
实际关节电流 63.00 64.00 65.00 66.00 67.00 68.00 69.00
时间关节温度 56.00 57.00 58.00 59.00 60.00 61.00 62.00
未使用
目标末端位姿 116.00 117.00 118.00 119.00 120.00 121.00
目标末端速度 122.00 123.00 124.00 125.00 126.00 127.00
目标末端加速度 128.00 129.00 130.00 131.00 132.00 133.00
实际末端位姿 92.00 93.00 94.00 95.00 96.00 97.00
实际末端速度 98.00 99.00 100.00 101.00 102.00 103.00
实际末端加速度 104.00 105.00 106.00 107.00 108.00 109.00
-------------- ------ ------ ------ ------ ------ ------ -----[05-30 11:13:56][应用][12824][信息]
1 是否发生碰撞
6 发生碰撞的关节
9 机器人状态
10 机器人错误码其实相当简单。
(这里是文档结束)
相关文章:
新松机械臂 2001端口服务的客户端例程
初级代码游戏的专栏介绍与文章目录-CSDN博客 我的github:codetoys,所有代码都将会位于ctfc库中。已经放入库中我会指出在库中的位置。 这些代码大部分以Linux为目标但部分代码是纯C的,可以在任何平台上使用。 源码指引:github源…...
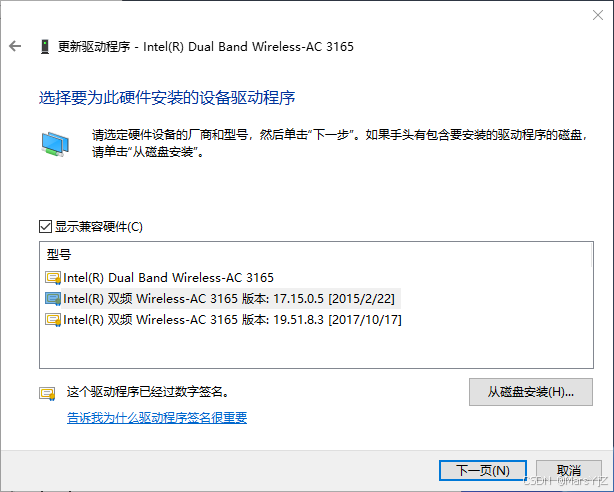
电脑网络重置,找不到原先自家的WIFI,手机还能正常连接并上网
问题排查:1、电脑感觉网络太慢,因此打算点击了网络重置 2、点击提示会删除网络,在五分钟后关机重启 3、从设备管理器设备的无线wifi属性-事件中发现删除记录 4、选择更新驱动程序 5、从列表中选取 6、更改回老驱动版本 备选方案&#…...
期末复习(学习)之机器学习入门基础
上课没听过报道。欢迎补充交流! 前言:老师画的重点其实可以完全不用看,我这里只是看了一眼书顺着书本敲一遍。 比较干货的部分,直接看学习通的内容就好。最重要的是把学习通的内容记好。 目录 老师划的重点:P50 结构…...

网络各类型(BMA,NBMA,P2P)
网络类型—基于二层(数据链路层)使用的协议不同从而导致数据包封装方式不同,工作方式也有所区别,从而对网络本身进行分类 一、网络类型分类 2. 关键差异对比 1. HDLC(高级数据链路控制协议) 协议特点&…...

Linux 库文件的查看和管理
Linux 库文件说明1、库文件的类型2、库文件存储路径3、库文件查找顺序 Linux 库文件管理1、查看动态库相关信息2、添加动态库查找路径 Linux 库文件说明 1、库文件的类型 Linux 中的库文件本质上就是封装好的功能模块,某个应用程序如果要实现某个功能,…...

Java设计模式深度解析:策略模式的核心原理与实战应用
目录 策略模式基础解析策略模式实现指南策略模式典型应用场景Java生态中的策略模式实践策略模式进阶技巧策略模式最佳实践总结与展望1. 策略模式基础解析 1.1 核心概念与定义 策略模式(Strategy Pattern)是一种行为型设计模式,它定义了一系列算法族,将每个算法封装成独立…...
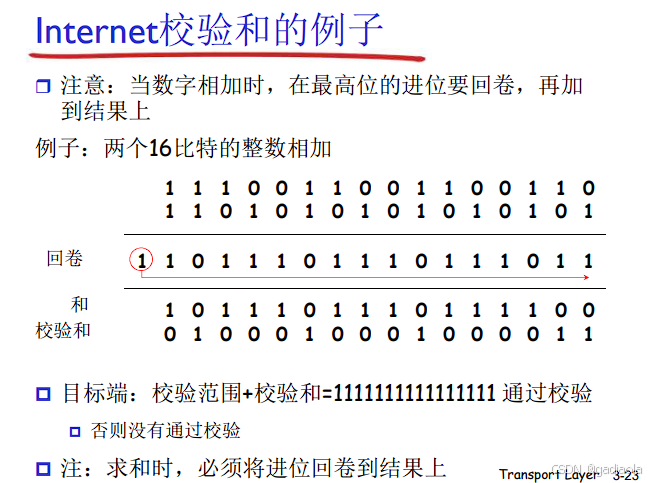
【计算机网络】第3章:传输层—概述、多路复用与解复用、UDP
目录 一、概述和传输层服务 二、多路复用与解复用 三、无连接传输:UDP 四、总结 (一)多路复用与解复用 (二)UDP 一、概述和传输层服务 二、多路复用与解复用 三、无连接传输:UDP 四、总结 (…...
服务的步骤)
6、在树莓派上安装 NTP(Network Time Protocol )服务的步骤
在树莓派上安装 NTP(Network Time Protocol )服务的步骤: 1. 安装 NTP 服务 打开树莓派终端,输入以下命令更新软件包列表: sudo apt-get update然后安装 NTP 服务: sudo apt-get install ntp2. 配置 NT…...
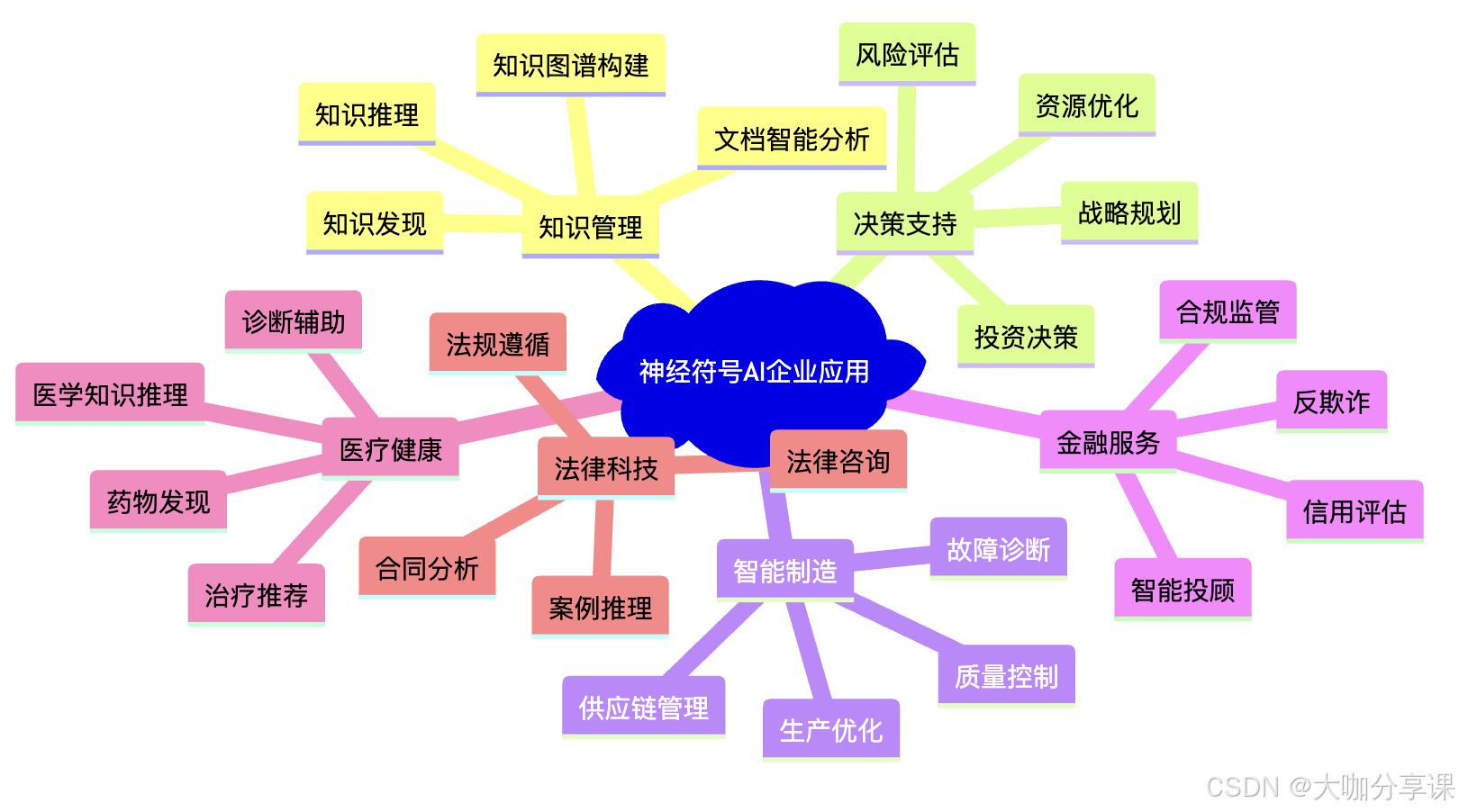
神经符号AI的企业应用:结合符号推理与深度学习的混合智能
💡 技术前沿: 神经符号AI代表了人工智能发展的新阶段,它将深度学习的模式识别能力与符号推理的逻辑分析能力有机结合,创造出更加智能、可解释且可靠的AI系统。这种混合智能技术正在重塑企业的智能化应用,从自动化决策到…...
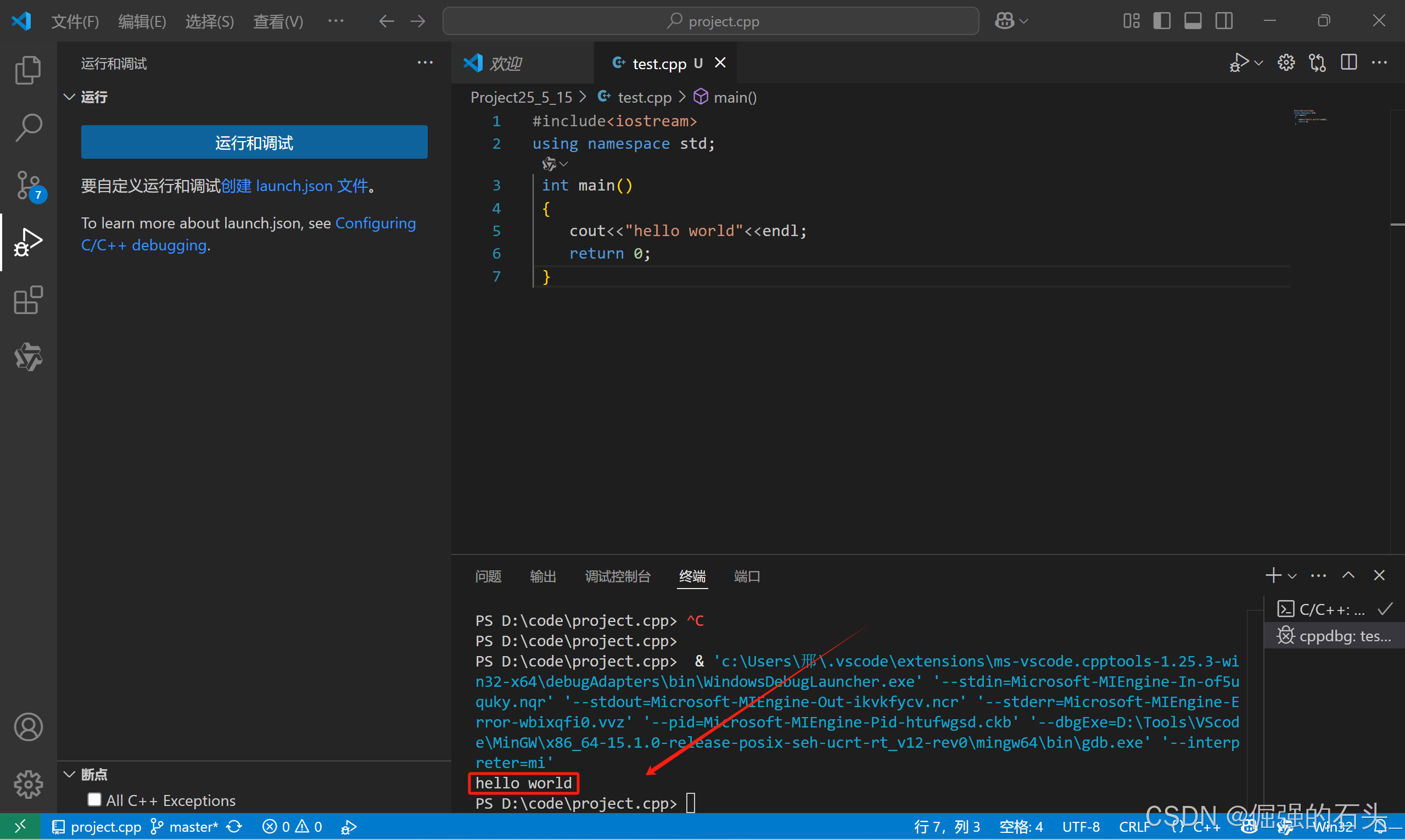
VSCode 中 C/C++ 安装、配置、使用全攻略:小白入门指南
引言 本文为Windows系统下安装配置与使用VSCode编写C/C代码的完整攻略,示例机器为Windows11。 通过本文的指导,你可以成功在Windows 机器上上使用VSCode进行C/C开发。 在文章开始之前,你可以先阅读下面这段话,以便于对步骤有个大…...

重温经典算法——希尔排序
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl 基本原理 希尔排序是插入排序的改进版,通过按增量分组并逐步缩小增量实现排序。时间复杂度取决于增量序列,平均约为 O(n log n) 到 O(n^(3/2))&…...
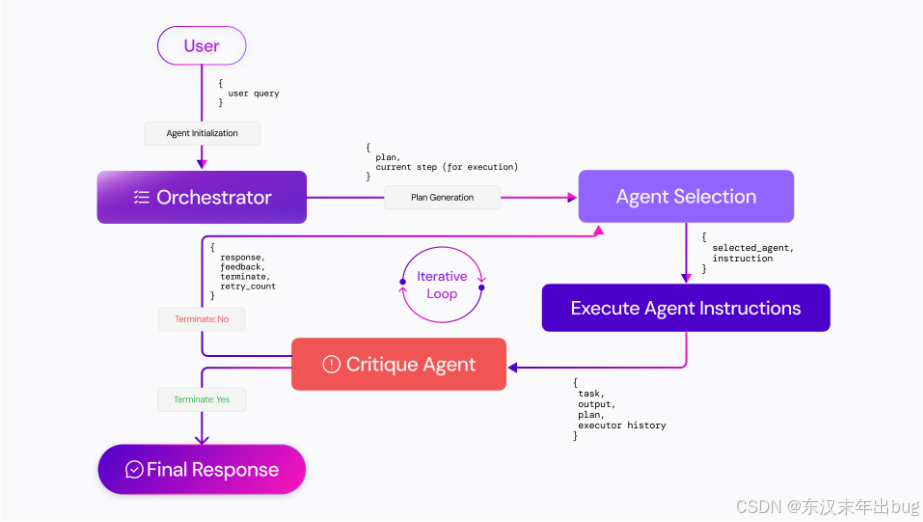
CortexON:开源的多代理AI系统无缝自动化和简化日常任务
简介 CortexON是一个开源的多代理AI系统,灵感来自Manus和OpenAI DeepResearch等高级代理平台。CortexON旨在无缝自动化和简化日常任务,擅长执行复杂的工作流程,包括全面的研究任务、技术操作和复杂的业务流程自动化。 技术架构 CortexON的技…...
海信IP810N-海思MV320芯片-安卓9-2+16G-免拆优盘卡刷固件包
海信IP810N-海思MV320芯片-安卓9-216G-免拆优盘卡刷固件包 线刷方法:(新手参考借鉴一下) 1.准备一个优盘,最佳是4G,卡刷强刷刷机,用一个usb2.0的8G以下U盘,fat32,2048块单分区格式化…...

【Golang】使用gin框架导出excel和csv文件
目录 1、背景2、go库【1】excel库下载【2】csv标准库 3、代码示例4、使用方法 1、背景 项目中可能会遇到导入导出一批数据的功能,对于批量大数据可能用表格的方式直观性更好,所以本篇文件来讲一下go中导出excel和csv文件的方式。 2、go库 【1】excel库…...
和AssetBundleBrowser的使用介绍)
【unity游戏开发入门到精通——通用篇】AssetBundle(AB包)和AssetBundleBrowser的使用介绍
文章目录 前言1、什么是AssetBundle?2、AB包与Resources系统对比3、AB包核心价值一、AB包打包工具Asset Bundle Browser1、下载安装AssetBundles-Browser2、打开Asset Bundle Browser窗口3、如何让资源关联AB包二、AssetBundleBrowser参数相关1、Configure 配置页签2、Build 构…...
2025年6月4日收获
Authorization Authorization是一种通用的、标准化的权限控制和认证的通用框架,它能够使跨系统和跨域的身份验证和授权管理更容易,使不同应用程序之间能够更轻松地实现单点登录(SSO)、用户身份验证和授权控制等。 在前端使用 axi…...
leetcode hot100 链表(二)
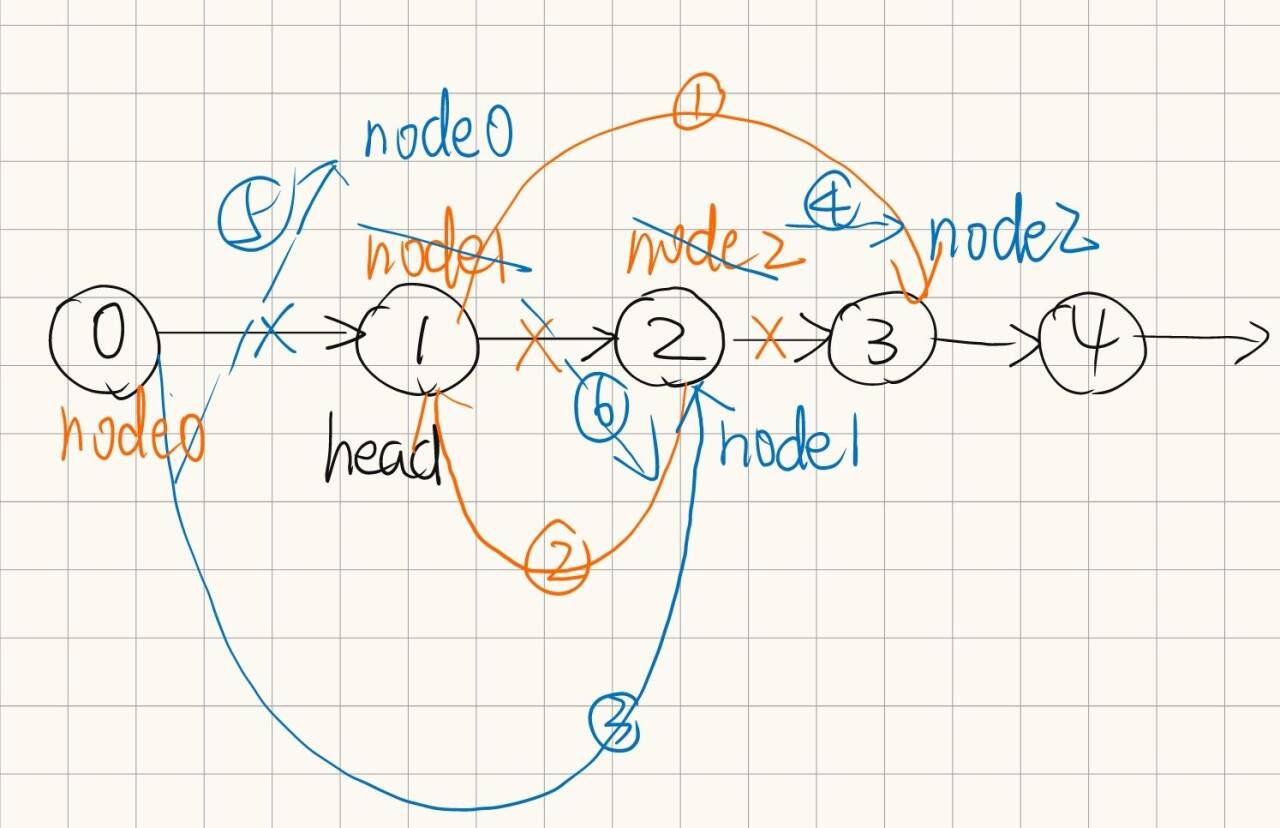
书接上回: leetcode hot100 链表(一)-CSDN博客 8.删除链表的倒数第N个结点 class Solution { public:ListNode* removeNthFromEnd(ListNode* head, int n) {ListNode* currhead;int len0;while(curr){currcurr->next;len;}int poslen-n…...

6. MySQL基本查询
1. 表的增删改查 Create(创建), Retrieve(读取), Update(更新), Delete(删除) 2. Create & Insert 语法: insert [info] table_name () values () 2.1. 案例: 创建一个学生表 指定列单行插入, 如果values前省略, 则默认是全属性插入多行指定列插入, 中间分隔符为, 3. 插入替…...

JavaWeb简介
目录 1.1 JavaWeb 简介 1.2 JavaWeb 技术栈 1.3 JavaWeb 交互模式 1.4 JavaWeb 的 C/S 和 B/S 模式 C/S 模式 (Client-Server / 客户端-服务器模式) B/S 模式 (Browser-Server / 浏览器-服务器模式) 1.5 JavaWeb 实现前…...
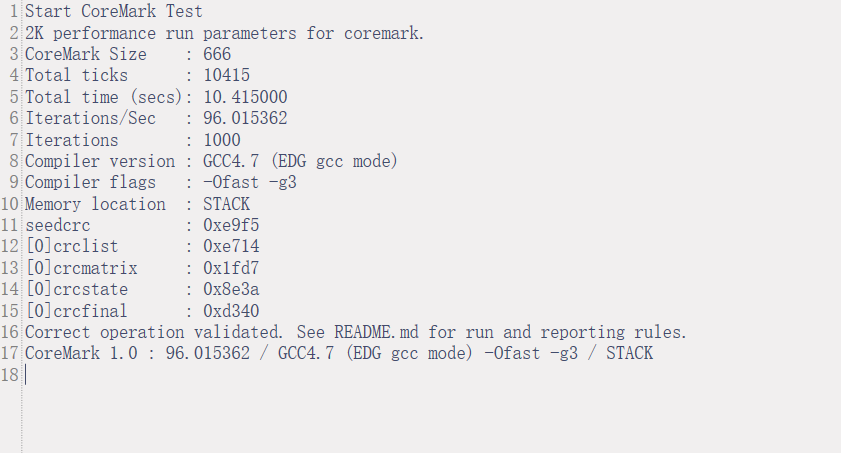
CMS32M65xx/67xx系列CoreMark跑分测试
CMS32M65xx/67xx系列CoreMark跑分测试 1、参考资料准备 1.1、STM32官方跑分链接 1.2、官网链接 官方移植文档,如下所示,点击红框处-移植文档: A new whitepaper and video explain how to port CoreMark-Pro to bare-metal 1.3、测试软件git下载链接 …...
中国区域30m/15天植被覆盖度数据集(2010-2022)
时间分辨率:日空间分辨率;:10m - 100m共享方:式开放获取数据大小:2.98 TB数据时间范围:2010-01-01 — 2022-12-31元数据更新时间:2024-12-23 数据集摘要 高时空分辨率的植被覆盖度产品存在着广…...

LabVIEW准分子激光器智能控制系统
LabVIEW 开发准分子激光器智能控制系统,针对放电激励型准分子激光器强电磁干扰环境下的控制难题,采用 “PC 端 LabVIEW 人机交互 MCU 端实时控制 光纤隔离通信” 架构,实现激光能量闭环控制、腔体环境监测、气路自动管理等功能。硬件选用 N…...

微服务面试资料1
在当今快速发展的技术领域,微服务架构已经成为构建复杂系统的重要方式之一。本文将围绕微服务的核心概念、技术栈、分布式事务处理、微服务拆分与设计,以及敏捷开发实践等关键问题展开深入探讨,旨在为准备面试的 Java 开发者提供一份全面的复…...

Pytest Fixture 详解
Pytest Fixture 详解 Fixture 是 pytest 最强大的功能之一,用于提供测试所需的依赖资源(如数据库连接、临时文件、模拟对象等),并支持复用、作用域控制和自动清理。以下是全面详解: 1. 基本用法 定义 Fixture 使用 …...

力扣HOT100之二分查找:74. 搜索二维矩阵
这道题直接a了,我们可以参考上一道题:35.搜索插入位置的思路,详情见我的上一篇博客。将每一行的第一个元素当作一个数组中的元素,然后对这个数组进行二分查找,如果直接找到了target,则直接返回true…...

【前端】前后端通信
前端开发主要完成的两件事: 1)界面搭建 2)数据交互 本知识页参考: https://juejin.cn/post/6925296067378429960 0. XMLHttpRequest 客户端的一个API,为浏览器和服务器通信提供了一个便携通道。现代浏览器支持XMLHttp…...
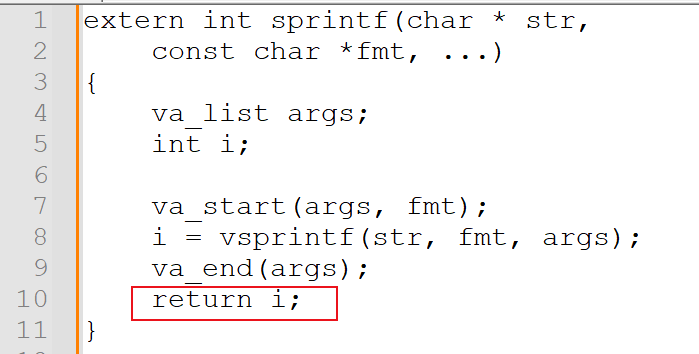
编程技能:格式化打印04,sprintf
专栏导航 本节文章分别属于《Win32 学习笔记》和《MFC 学习笔记》两个专栏,故划分为两个专栏导航。读者可以自行选择前往哪个专栏。 (一)WIn32 专栏导航 上一篇:编程技能:格式化打印03,printf 回到目录…...
【函数1】)
C语言基础(11)【函数1】
内容提要 函数 文章目录 内容提要函数函数的描述函数的分类相关概念函数的定义:定义:案例: 形参和实参形参(形式参数)实参(实际参数)案例: 函数的返回值案例: 函数 函数…...
R语言基础| 下载、安装
在此前的单细胞教程中,许多小伙伴都曾因为R语言基础不足而十分苦恼。R语言是一种开源的编程语言和软件环境,专门用于统计分析、图形表示和数据挖掘。它最初由Ross Ihaka和Robert Gentleman在1993年创建,旨在为统计学家和数据分析师提供一个广…...

【hive sql】窗口函数
参考 包括窗口函数在内的执行顺序 from & join --确定数据源 where --行级过滤 group by --分组 having --组级过滤 窗口函数 --计算窗口函数结果 select --选择列 distinct --去重 order by --最终排序(可对窗口函数结果进行排序) limit/offset -…...