SPI通信协议(软件SPI读取W25Q64)
SPI通信协议
文章目录
- SPI通信协议
- 1.SPI通信
- 2.SPI硬件和软件规定
- 2.1SPI硬件电路
- 2.2移位示意图
- 2.3SPI基本时序单元
- 2.3.1起始和终止条件
- 2.3.2交换一个字节(模式1)
- 2.4SPI波形分析(辅助理解)
- 2.4.1发送指令
- 2.4.2指定地址写
- 2.4.3指定地址读
- 3.W25Q64
- 3.1简介
- 3.2硬件电路(引脚说明)
- 3.3框图
- 3.4手册重要点
- 4.Flash操作注意事项
- 5.软件SPI读取W25Q64(实操)
- 5.1接线图
- 5.2程序整体框架
- 5.3代部分
- 5.4总结
- 5.4.1核心步骤
- 5.4.2重点总结
- 5.4.3手写部分
- 5.4.2重点总结
- 5.4.3手写部分
SPI的传输速度比较快,SPI没有规定传输速度,最大传输速度取决于芯片产商的设计需求。
SPI的实现功能没有I2C多
SPI硬件开销比较大,通信线个数比较多,通信过程中,经常有资源浪费的现象
1.SPI通信
- SPI(Serial Peripheral Interface)是由Motorola公司开发的一种通用数据总线
- 四根通信线:SCK(Serial Clock)串行时钟线、MOSI(Master Output Slave Input)主机输出从机输入、MISO(Master Input Slave Output)主机输入从技术出、SS(Slave Select)从机选择
- 同步,全双工
- 支持总线挂载多设备(一主多从)
SCK引脚就是用来提供时钟信号的,数据位的输出和输入都是在SCK的上升或下降沿进行的,这样数据位的手法时刻就可以明确的确定,并且同步时序
一主多从,不支持多主机。

2.SPI硬件和软件规定
2.1SPI硬件电路
SS线都是低电平有效,所以需要哪条线,哪条置低电平就好了
如果三个送机始终都是推挽输出,会导致冲突,所以协议规定当从机的SS引脚为高电平,也就从机未被选中时,MISO引脚必须切换为高阻态(相当于引脚断开,不输出任何电平),切换是在从机中进行,所以主机不用关系这些问题。
- 所有SPI设备的SCK、MOSI、MISO分别连在一起
- 主机另外引出多条SS控制线,分别接到各从机的SS引脚
- 输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入

一主三从(本图)
2.2移位示意图
SPI基本的收发电路就是使用了这样一个移位的模型。

左边为SPI主机有一个8位的移位寄存器;右边位SPI从机也有一个8位的移位寄存器。
由主机产生时钟(这里为波特率发生器),它产生的时钟驱动主机的移位寄存器进行移位,同时通过SCK输出到从机。
数据是往左移动的,通过MOSI引脚,输入到从机移位寄存器的右边。从机移位寄存器的数据,通过MISO引脚,输入到主机移位寄存器的右边。
工作流程:波特率发生器时钟的上升沿,所有移位寄存器向左移动一位,移出去的位放到引脚上,波特率发生器时钟的下降沿,引脚上的位,采样输入到移位寄存器的最低位。
如果只想单方面的发送或接收数据,只需随意发送数据将另一边的数据置换过来就好了。
2.3SPI基本时序单元
2.3.1起始和终止条件
- 起始条件:SS从高电平切换到低电平
- 终止条件:SS从低电平切换到高电平

通信过程种SS保持低电平
2.3.2交换一个字节(模式1)
(Clock polarity)时钟极性和(Clock Phase)时钟相位,每一位都可以配置为1和0,所以有4种模式,功能一样,所以实际学习其中一种就好了
- 交换一个字节(模式1)
- CPOL=0:空闲状态时,SCK为低电平
- CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

MISO介于高电平和低电平之间表示高阻态。
模式0与模式1的区别就是模式0把这个数据变化的时机给提前了。开始就要移出数据,模式0用的最多。
模式2和模式2,分别是模式0和模式1的SCK取反,了解0/1就理解2/3.
2.4SPI波形分析(辅助理解)
SPI没有应答位
2.4.1发送指令
- 发送指令
- 向SS指定的设备,发送指令(0x06)

2.4.2指定地址写
- 指定地址写
- 向SS指定的设备,发送写指令(0x02), 随后在指定地址(Address[23:0])下,写入指定数据(Data)

2.4.3指定地址读
- 指定地址读
- 向SS指定的设备,发送读指令(0x03), 随后在指定地址(Address[23:0])下,读取从机数据(Data)

3.W25Q64
3.1简介
- W25Qxx系列是一种低成本、小型化、使用简单的非易失性存储器,常应用于数据存储、字库存储、固件程序存储等场景
- 存储介质:Nor Flash(闪存)
- 时钟频率:80MHz / 160MHz (Dual SPI) / 320MHz (Quad SPI)
- 存储容量(24位地址):
- W25Q40: 4Mbit / 512KByte
- W25Q80: 8Mbit / 1MByte
- W25Q16: 16Mbit / 2MByte
- W25Q32: 32Mbit / 4MByte
- W25Q64: 64Mbit / 8MByte
- W25Q128: 128Mbit / 16MByte
- W25Q256: 256Mbit / 32MByte
字库存储:如果是少量的可以使用库函数导入使用,如果需要大量的可以添加点阵进行显示。
固件程序:使用外挂设备进行
时钟频率:160/320MHz,本质上都是80MHz,只是一次性发送/接收一个字节和
一次性发送/接收两个字节/四个字节的区别。效率高了频率也高了,但本质还是80MHz。
W25Q256:24位地址最多可存储16MHz(2^24/1024/1024)的数据,32MHz的存不下。
分为3字节地址模式和4字节地址模式,3字节模式下,只能读写前16MB的数据。要想读取到所有的存储单元,可以进入4字节地址的模式 。

3.2硬件电路(引脚说明)

1号引脚/CS:有个斜杆表示低电平有效
3号引脚WP(write rotect):写保护,配合内部的寄存器配置。写保护低电平有效,高电平无效
7号引脚HOLED:数据保持,低电平有效。
I O 0 / 1 / 2 / 3 IO_{0/1/2/3} IO0/1/2/3: 普通的SPI模式不用关注括号里的数据,使用双重SPI,DI和DO变成IO0/1,使用四重SPI,WP和HOLED为IO2/3。
3.3框图

可读取状态寄存器的busy位置是否为1,判断是否在搬砖(工作)
重点部分:
- flash的空间划分,划分为块、扇区和页
- SPI控制逻辑,就是整个芯片的管理员,执行指令、读取数据都靠它
- 状态寄存器,忙状态,写使能、写保护等功能和它有关
- 256字节的页缓存,它会对一次性写入的数据量,产生限制
3.4手册重要点
状态寄存器1:
- BUSY:当设备正在执行页编程。页编程就是写入数据,扇区擦除、块擦除、整片擦除、或者写状态寄存器指令时,BUGY位置1.在这期间,设备会忽略进一步的指令,除了读状态寄存器和擦除挂起指令。当编程、擦除、写状态寄存器指令结束后,BUGY清零来指示设备准备好了。
- Write Enable Latch(WEL):使能锁存位WEL,在执行完写使能指令后,WLE置1,代表芯片可以进行写入操作,当设备写失能时,WL位清0。一是,上电后芯片默认写失能;二是,在执行完这些指令之后(包括,我们发送了失能指令,页编程、扇区擦除等等,WEL会=0),表明,当我们先写使能,再执行写入数据操作后,不需要再手动写入失能,也说明每个操作前都需要手动使能。
4.Flash操作注意事项
写入操作时:
- 写入操作时:写入操作前,必须先进行写使能
- 每个数据位只能由1改写为0,不能由0改写为1
- 写入数据前必须先擦除,擦除后,所有数据位变为1
- 擦除必须按最小擦除单元进行
- 连续写入多字节时,最多写入一页的数据,超过页尾位置的数据,会回到页首覆盖
- 写入写入操作结束后,芯片进入忙状态,不响应新的读写操作
读取操作时:
- 直接调用读取时序,无需使能,无需额外操作,没有页的限制,读取操作结束后不会进入忙状态,但不能在忙状态时读取
5.软件SPI读取W25Q64(实操)
5.1接线图

5.2程序整体框架
- 建立一个MySPI模块,包含通信引脚封装,初始化,以及SPI通信的3个拼图(起始、终止和交换一个字节),通信层内容
- 建立一个W25Q64的硬件驱动层,基于SPI层建立一个W25Q64模块,在这个模块里,调用底层SPI的拼图来拼接各种指令和功能的完整时序,比如写失能、擦除、页编程、读数据等等
- 主函数,调用驱动层的函数完成想要实现的功能
5.3代部分
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "KEY.h"
#include "OLED.h"
//#include "OLED_Font.h"
#include "W25Q64.h"uint8_t MID;
uint16_t DID;uint8_t ArrayWrite[] = {0x01, 0x02, 0x03, 0x04}; //定义要写入数据的测试数组
uint8_t ArrayRead[4]; //定义要读取数据的测试数组int main(void){/*模块初始化*/OLED_Init(); //OLED初始化W25Q64_Init(); //W25Q64初始化/*显示静态字符串*/OLED_ShowString(1, 1, "MID: DID:");OLED_ShowString(2, 1, "W:");OLED_ShowString(3, 1, "R:");/*显示ID号*/W25Q64_ReadID(&MID, &DID); //获取W25Q64的ID号OLED_ShowHexNum(1, 5, MID, 2); //显示MIDOLED_ShowHexNum(1, 12, DID, 4); //显示DID W25Q64_SectorErase(0x000000); //扇区擦除W25Q64_PageProgram(0x000000,ArrayWrite,4);//将写入数据的测试数组写入到W25Q64中W25Q64_ReadData(0x000000, ArrayRead, 4); //读取刚写入的测试数据到读取数据的测试数组中/*显示数据*/OLED_ShowHexNum(2, 3, ArrayWrite[0], 2); //显示写入数据的测试数组OLED_ShowHexNum(2, 6, ArrayWrite[1], 2);OLED_ShowHexNum(2, 9, ArrayWrite[2], 2);OLED_ShowHexNum(2, 12, ArrayWrite[3], 2);OLED_ShowHexNum(3, 3, ArrayRead[0], 2); //显示读取数据的测试数组OLED_ShowHexNum(3, 6, ArrayRead[1], 2);OLED_ShowHexNum(3, 9, ArrayRead[2], 2);OLED_ShowHexNum(3, 12, ArrayRead[3], 2);while(1){}
}MySPI.c
#include "stm32f10x.h" // Device header//引脚配置层//配置SS电平,PA4设置
void MySPI_W_SS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_4,(BitAction)BitValue);
}//写SCK电平,PA5设置
void MySPI_W_SCK(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_5,(BitAction)BitValue);
}//MOSI电平,PA7设置
void MySPI_W_MOSI(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue);
}//MISO电平,PA6接收
uint8_t MySPI_R_MISO()
{return GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6);
}//SPI初始化
void MySPI_Init()
{ //开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIO初始化GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//设置默认电平MySPI_W_SS(1);MySPI_W_SCK(0);
}//SPI起始
void MySPI_Start(void)
{MySPI_W_SS(0);
}//SPI终止
void MySPI_Stop(void)
{MySPI_W_SS(1);
}//SPI交换传输一个字节,使用SPI模式0
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i,ByteReceive = 0x00;for(i = 0;i<8;i++){MySPI_W_MOSI(!!(ByteSend & (0x80 >> i)));MySPI_W_SCK(1);if(MySPI_R_MISO()){ByteReceive |= (0x80 >> i);}MySPI_W_SCK(0);}return ByteReceive;
}W25Q64.c
#include "stm32f10x.h" // Device header
#include "MySPI.h"
#include "W25Q64_lns.h"//初始化W25Q64void W25Q64_Init(void)
{MySPI_Init();
}//MPU6050读取ID号
void W25Q64_ReadID(uint8_t *MID,uint16_t *DID)
{MySPI_Start();MySPI_SwapByte(W25Q64_DUMMY_BYTE);*MID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*DID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*DID <<= 8;*DID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE);MySPI_Stop();
}//写使能
void W25Q64_WriteEnable(void)
{MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_WRITE_ENABLE); //交换发送写使能的指令MySPI_Stop(); //SPI终止
}//等待忙
void W25Q64_WaitBusy(void)
{uint32_t Timerout;MySPI_Start();MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1);Timerout = 100000;while((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0x01)==0x01){Timerout --;if(Timerout == 0){break; //超时跳出等待}}MySPI_Stop();
}//W25Q64页编程
void W25Q64_PageProgram(uint32_t Address,uint8_t *DataArray,uint16_t Count)
{uint16_t i;W25Q64_WriteEnable(); //写使能MySPI_Start();MySPI_SwapByte(W25Q64_PAGE_PROGRAM); //交换发送页编程的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址MySPI_SwapByte(Address); //交换发送地址7~0位for(i = 0;i<Count;i++) //循环Count{MySPI_SwapByte(DataArray[i]);}MySPI_Stop(); //SPI停止W25Q64_WaitBusy();}//扇区擦除
void W25Q64_SectorErase(uint32_t Address)
{W25Q64_WriteEnable(); //写使能MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB); //交换发送扇区擦除的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位MySPI_Stop(); //SPI终止W25Q64_WaitBusy(); //等待忙
}
5.4总结
5.4.1核心步骤
软件 SPI 实现 W25Q64 读写的核心步骤
- SPI 协议初始化
- 配置 GPIO(SCK、MOSI、MISO、CS)
- 设置 SPI 模式(W25Q64 常用模式 0或模式 3)
- 定义位操作函数(如
SCK_HIGH()、MOSI_WRITE(bit))
- W25Q64 操作流程
- 片选使能(CS 拉低)
- 发送命令(如
0x03= 读数据、0x20= 扇区擦除) - 发送 24 位地址(按高、中、低字节顺序)
- 数据传输(读 / 写数据)
- 片选失能(CS 拉高)
- 关键注意事项
- 写操作前必须使能:每次写 / 擦除前需发送
WRITE_ENABLE(0x06)命令 - 擦除单位:最小擦除单位为4KB 扇区(SECTOR_ERASE),地址需按 4KB 对齐
- 状态检查:写 / 擦除操作后需读取状态寄存器(
READ_STATUS_REG1(0x05)),等待BUSY=0
- 写操作前必须使能:每次写 / 擦除前需发送
5.4.2重点总结
关键总结
- 通信流程:CS 拉低 → 发命令 → 发地址 → 读写数据 → CS 拉高
- 时序严格:软件 SPI 需精确控制 SCK 高低电平延时(根据 MCU 速度调整)
- 擦除限制:擦除前需确保地址对齐(如 4KB 倍数),且每次擦除耗时约 40ms
- 状态检测:所有写 / 擦除操作后必须等待
BUSY=0才能继续后续操作
5.4.3手写部分
在获取完芯片ID之后测试一下
地址自动自增到,上一位地址的后面
项**
- 写操作前必须使能:每次写 / 擦除前需发送
WRITE_ENABLE(0x06)命令 - 擦除单位:最小擦除单位为4KB 扇区(SECTOR_ERASE),地址需按 4KB 对齐
- 状态检查:写 / 擦除操作后需读取状态寄存器(
READ_STATUS_REG1(0x05)),等待BUSY=0
5.4.2重点总结
关键总结
- 通信流程:CS 拉低 → 发命令 → 发地址 → 读写数据 → CS 拉高
- 时序严格:软件 SPI 需精确控制 SCK 高低电平延时(根据 MCU 速度调整)
- 擦除限制:擦除前需确保地址对齐(如 4KB 倍数),且每次擦除耗时约 40ms
- 状态检测:所有写 / 擦除操作后必须等待
BUSY=0才能继续后续操作
5.4.3手写部分
在获取完芯片ID之后测试一下
地址自动自增到,上一位地址的后面
不擦除的话:读出的数据 = 原始数据&写入的数据
相关文章:
SPI通信协议(软件SPI读取W25Q64)
SPI通信协议 文章目录 SPI通信协议1.SPI通信2.SPI硬件和软件规定2.1SPI硬件电路2.2移位示意图2.3SPI基本时序单元2.3.1起始和终止条件2.3.2交换一个字节(模式1) 2.4SPI波形分析(辅助理解)2.4.1发送指令2.4.2指定地址写2.4.3指定地…...

PostgreSQL-基于PgSQL17和11版本导出所有的超表建表语句
最新版本更新 https://code.jiangjiesheng.cn/article/368?fromcsdn 推荐 《高并发 & 微服务 & 性能调优实战案例100讲 源码下载》 1. 基于pgsql 17.4 研究 查询psql版本:SELECT version(); 查看已知1条建表语句和db中数据关系 SELECT create_hypert…...
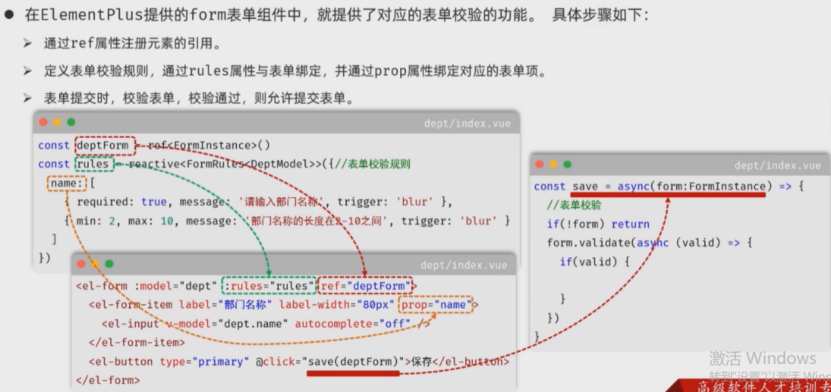
JavaWeb:前后端分离开发-部门管理
今日内容 前后端分离开发 准备工作 页面布局 整体布局-头部布局 Container 布局容器 左侧布局 资料\04. 基础文件\layout/index.vue <script setup lang"ts"></script><template><div class"common-layout"><el-containe…...

ArcGIS计算多个栅格数据的平均栅格
3种方法计算多个栅格数据的平均栅格 1->使用“ 栅格计算器”工具 原理就是把多幅影像数据相加,然后除以个数,就能得到平均栅格。 2-> 使用“像元统计数据”工具,如果是ArcGIS pro,则是“像元统计”工具。使用这个工具可以…...
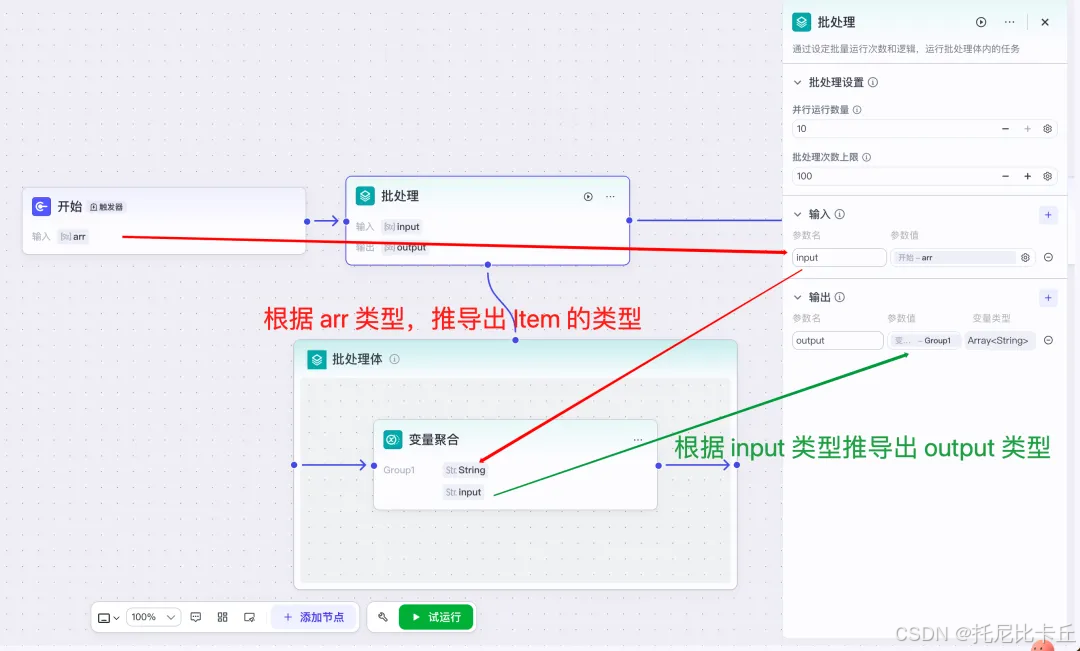
字节开源FlowGram:AI时代可视化工作流新利器
字节终于开源“扣子”同款引擎了!FlowGram:AI 时代的可视化工作流利器 字节FlowGram创新性地融合图神经网络与多模态交互技术,构建了支持动态拓扑重构的可视化流程引擎。该系统通过引入 f ( G ) ( V ′ , E ′ ) f(\mathcal{G})…...

如何选择合适的分库分表策略
选择合适的分库分表策略需要综合考虑业务特点、数据规模、访问模式、技术成本等多方面因素。以下是系统性的选择思路和关键决策点: 一、核心决策因素 业务需求分析 数据规模:当前数据量(如亿级)、增长速度(如每日新增百…...
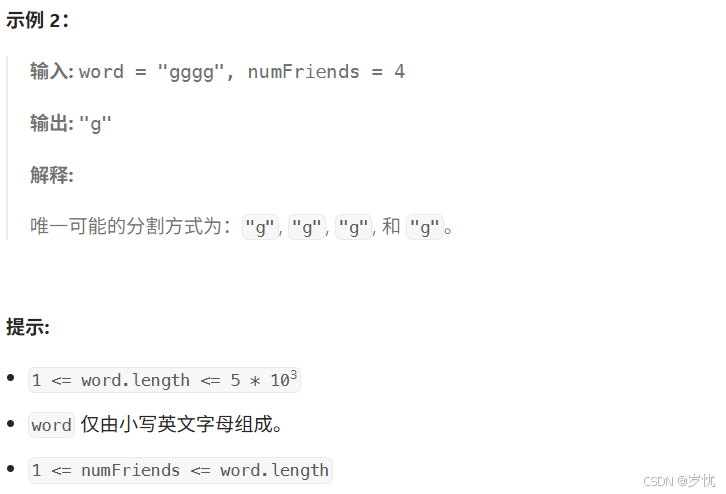
(LeetCode 每日一题)3403. 从盒子中找出字典序最大的字符串 I (贪心+枚举)
题目:3403. 从盒子中找出字典序最大的字符串 I 题目:贪心枚举字符串,时间复杂度0(n)。 最优解的长度一定是在[1,n-numFriends]之间。 字符串在前缀都相同的情况下,长度越长越大。 C版本: class Solution { public:st…...
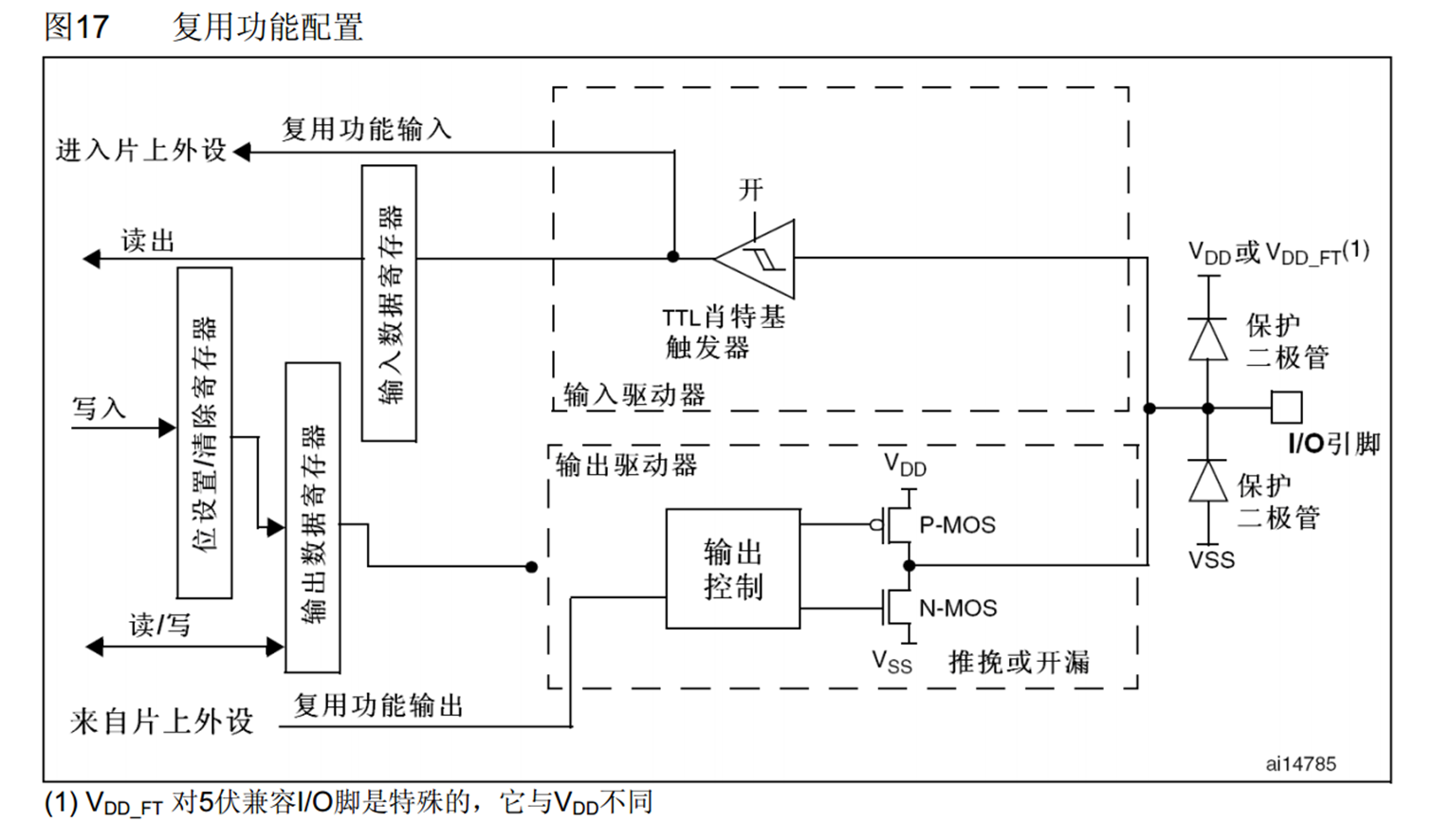
GPIO的内部结构与功能解析
一、GPIO总体结构 总体构成 1.APB2(外设总线) APB2总线是微控制器内部连接CPU与外设(如GPIO)的总线,负责CPU对GPIO寄存器的读写访问,支持低速外设通信 2.寄存器 控制GPIO的配置(输入/输出模式、上拉/下拉等&#x…...

Python训练打卡Day42
Grad-CAM与Hook函数 知识点回顾 回调函数lambda函数hook函数的模块钩子和张量钩子Grad-CAM的示例 在深度学习中,我们经常需要查看或修改模型中间层的输出或梯度。然而,标准的前向传播和反向传播过程通常是一个黑盒,我们很难直接访问中间层的信…...

深度学习中的负采样
深度学习中的负采样 负采样(Negative Sampling) 是一种在训练大型分类或概率模型(尤其是在输出类别很多时)中,用来加速训练、降低计算量的方法。 它常用于: 词向量训练(如 Word2Vecÿ…...
php7+mysql5.6单用户中医处方管理系统V1.0
php7mysql5.6中医处方管理系统说明文档 一、系统简介 ----------- 本系统是一款专为中医诊所设计的处方管理系统,基于PHPMySQL开发,不依赖第三方框架,采用原生HTML5CSS3AJAX技术,适配手机和电脑访问。 系统支持药品管理、处方开…...

Java 大视界 — Java 大数据在智能安防视频监控中的异常事件快速响应与处理机制
/*Java 大数据在智能安防视频监控中的异常事件快速响应与处理机制(简化示例)*/// 1. Event.java - 异常事件模型 package com.security.model;public class Event {private String id;private String type; // 如: "入侵", "火警"pr…...
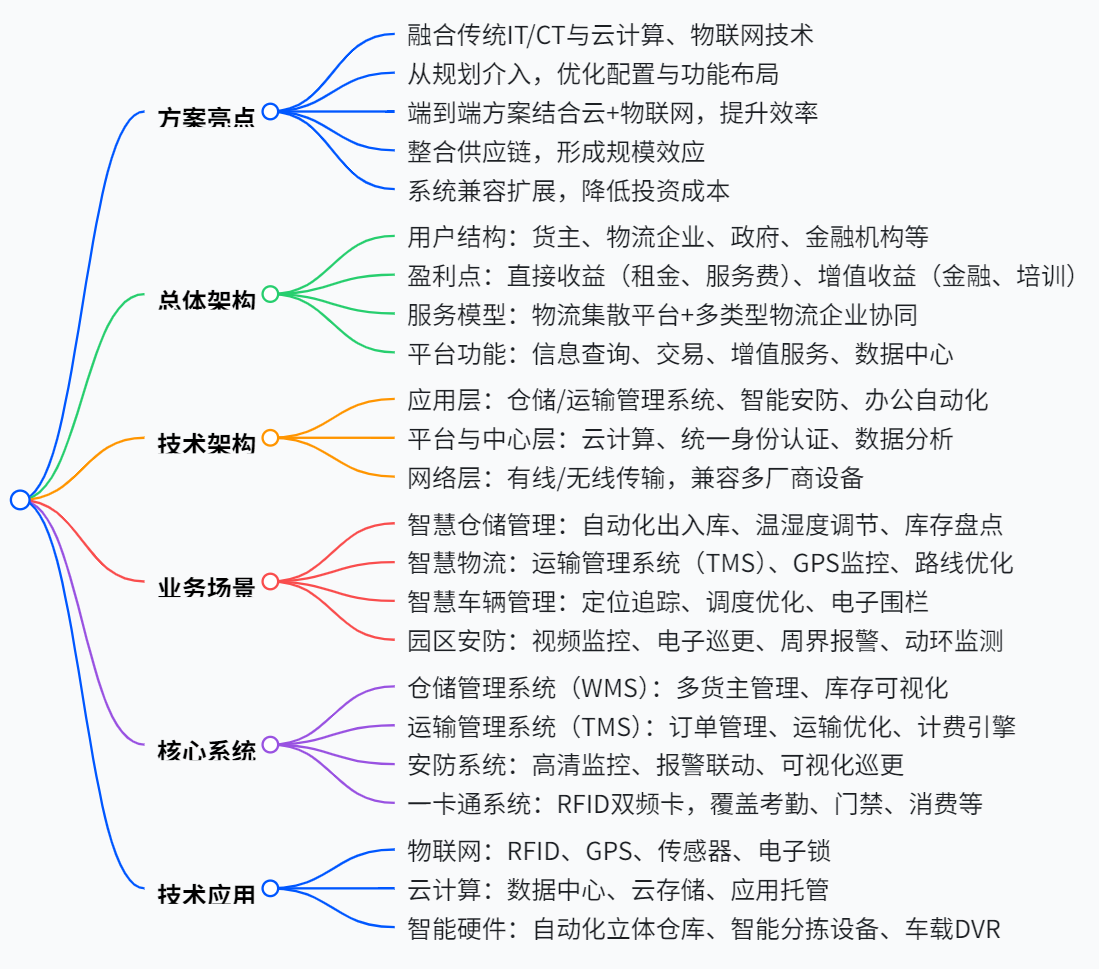
智慧物流园区整体解决方案
该智慧物流园区整体解决方案借助云计算、物联网、ICT 等技术,从咨询规划阶段介入,整合供应链上下游资源,实现物流自动化、信息化与智能化。方案涵盖智慧仓储管理(如自动化立体仓储系统、温湿度监控)、智慧物流(运输管理系统 TMS、GPS 监控)、智慧车辆管理(定位、调度、…...

审批流程管理系统开发记录:layui前端交互的实践
一、需求拆解与技术选型 本次开发围绕企业审批流程管理场景,需实现以下核心功能: 前端申请表单与流程进度可视化底部滑动审批弹窗交互多版本MySQL数据库支持流程数据的增删改查与状态管理技术栈选择: 前端采用LayUI框架,利用其时间线组件(lay-timeline)实现流程进度展示…...
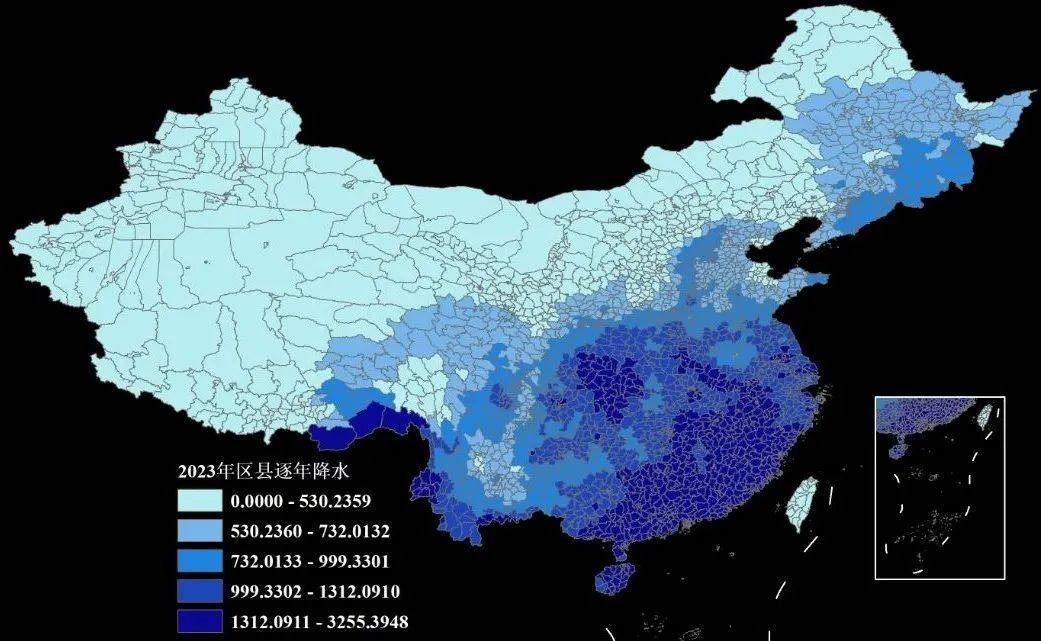
【会员专享数据】1960—2023年我国省市县三级逐年降水量数据(Shp/Excel格式)
之前我们分享过1960-2023年我国0.1分辨率的逐日、逐月、逐年降水栅格数据(可查看之前的文章获悉详情),是研究者Jinlong Hu与Chiyuan Miao分享在Zenodo平台上的数据,很多小伙伴拿到数据后反馈栅格数据不太方便使用,问我…...

2025年精通MVCC
今年找工作,无一例外又问到了MVCC这个知识点。几乎每次换工作都会被问到这个面试有用,工作毫无 * 用的知识。但是环境就是这样,既然如此,我们用一篇文章彻底搞懂MVCC 1.MVCC是什么 MVCC(Multi-Version Concurrency C…...

硬路由与软路由
目录 核心区别 ⚙️ 性能与功能定位 如何选择? 核心区别 硬路由: 本质: 专用的硬件设备。构成: 厂家将特定的路由器操作系统(通常是高度定制化、封闭或精简的)固化在专用的硬件平台上。硬件:…...
OpenCV C++ 心形雨动画
❤️ OpenCV C 心形雨动画 ❤️ 本文将引导你使用 C 和 OpenCV 库创建一个可爱的心形雨动画。在这个动画中,心形会从屏幕顶部的随机位置落下,模拟下雨的效果。使用opencv定制自己的专属背景 目录 简介先决条件核心概念实现步骤 创建项目定义心形结构…...

Fullstack 面试复习笔记:Java 基础语法 / 核心特性体系化总结
Fullstack 面试复习笔记:Java 基础语法 / 核心特性体系化总结 上一篇笔记:Fullstack 面试复习笔记:操作系统 / 网络 / HTTP / 设计模式梳理 目前上来说,这个系列的笔记本质上来说,是对不理解的知识点进行的一个梳理&…...
安卓Compose实现鱼骨加载中效果
安卓Compose实现鱼骨加载中效果 文章目录 安卓Compose实现鱼骨加载中效果背景与简介适用场景Compose骨架屏与传统View实现对比Shimmer动画原理简介常见问题与优化建议参考资料 本文首发地址 https://h89.cn/archives/404.html 背景与简介 在移动应用开发中,加载中占…...

使用qt 定义全局钩子 捕获系统的键盘事件
使用qt 定义全局钩子 捕获系统的键盘事件 即使焦点不在自定义软件上,也能够触发 以下待接口代码: class Hook :public QObject { Q_OBJECT public: Hook(); enum Type { CTRL_E, CTRL_W, SPACE, Enter, C };//自定义枚举,定义“修改”、“撤回…...

FreeType 字体信息检查工具 - 现代C++实现
文章目录 获取字体的版权信息工具简介主要特点1. 现代C实现2. 完整的功能3. 健壮的错误处理4. 国际化支持 使用说明技术亮点 获取字体的版权信息 #include <iostream> // 标准输入输出流库 #include <string> // 字符串处理库 #include <vector>…...

el-table 树形数据,子行数据可以异步加载
1、 <el-tableborder:header-cell-style"tableStyle?.headerCellStyle"ref"tableRef":data"tableData"row-key"id":default-expand-all"false" // 默认不展开所有树形节点:tree-props"{ children: children, hasC…...
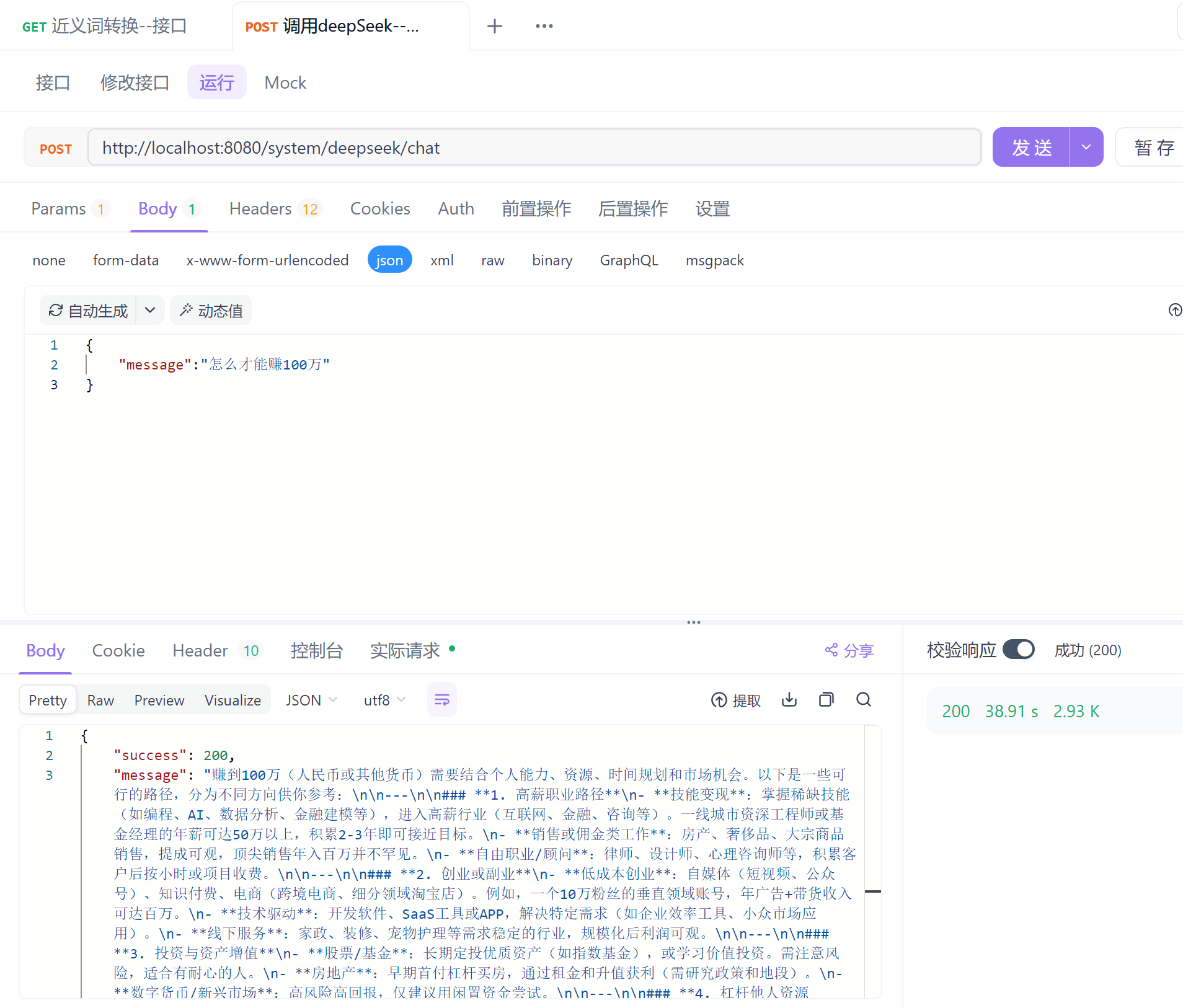
【使用JAVA调用deepseek】实现自能回复
在Spring Boot系统中接入DeepSeek服务,并将其提供给用户使用,通常需要以下步骤: 一、准备工作 (1)注册DeepSeek开发者账号 访问DeepSeek官网,注册并创建应用,获取API Key。 API文档࿱…...

【Linux系列】rsync命令详解与实践
博客目录 高效文件同步的艺术:rsync 命令详解与实践rsync 命令解析rsync 的核心优势1. 增量传输:效率的革命2. 归档模式(-a):保留文件所有属性3. 人性化输出(-h)与进度显示(--progress) 实际应用场景1. 文件备份与版本管理2. 跨设备同步3. 大…...
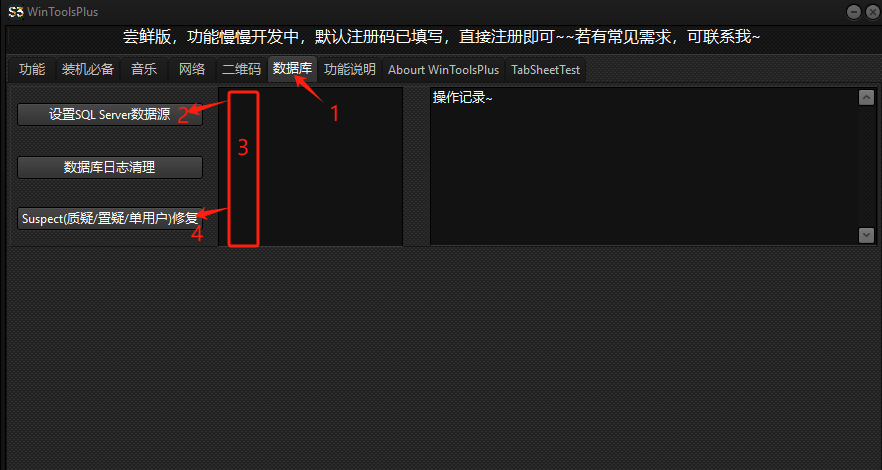
Windows系统工具:WinToolsPlus 之 SQL Server Suspect/质疑/置疑/可疑/单用户等 修复
数据库在数据库列表状态是 Suspect/质疑/置疑/可疑/单用户等 非正常状态时, 使用WinToolsPlus 数据库页签 先设置 数据源 , 选择 需要清理日志的数据库, 点击 Suspect/质疑/置疑/可疑/单用户 按钮即可进修复。 修复过程会有数据库服务停止和启…...
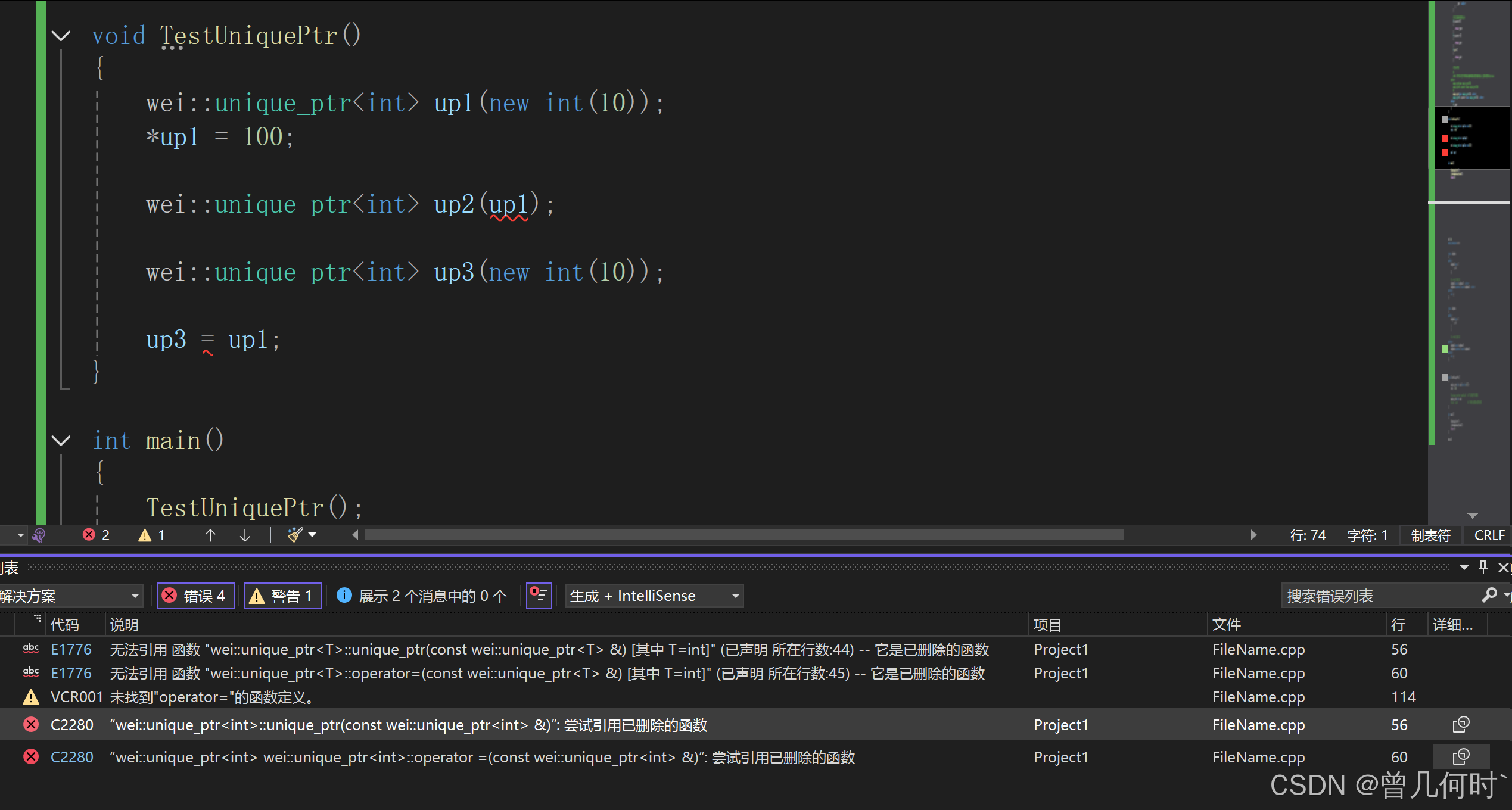
C++——智能指针 unique_ptr
unique_ptr的实现原理:简单粗暴的防拷贝 目录 一、使用C11中的新用法unique_ptr 二、使用c11模拟实现 三、使用c98特性实现 四、模拟实现unique_ptr 五、发现问题 一、使用C11中的新用法unique_ptr 由于限制了拷贝以及赋值 导致缺陷:unique_ptr管理…...
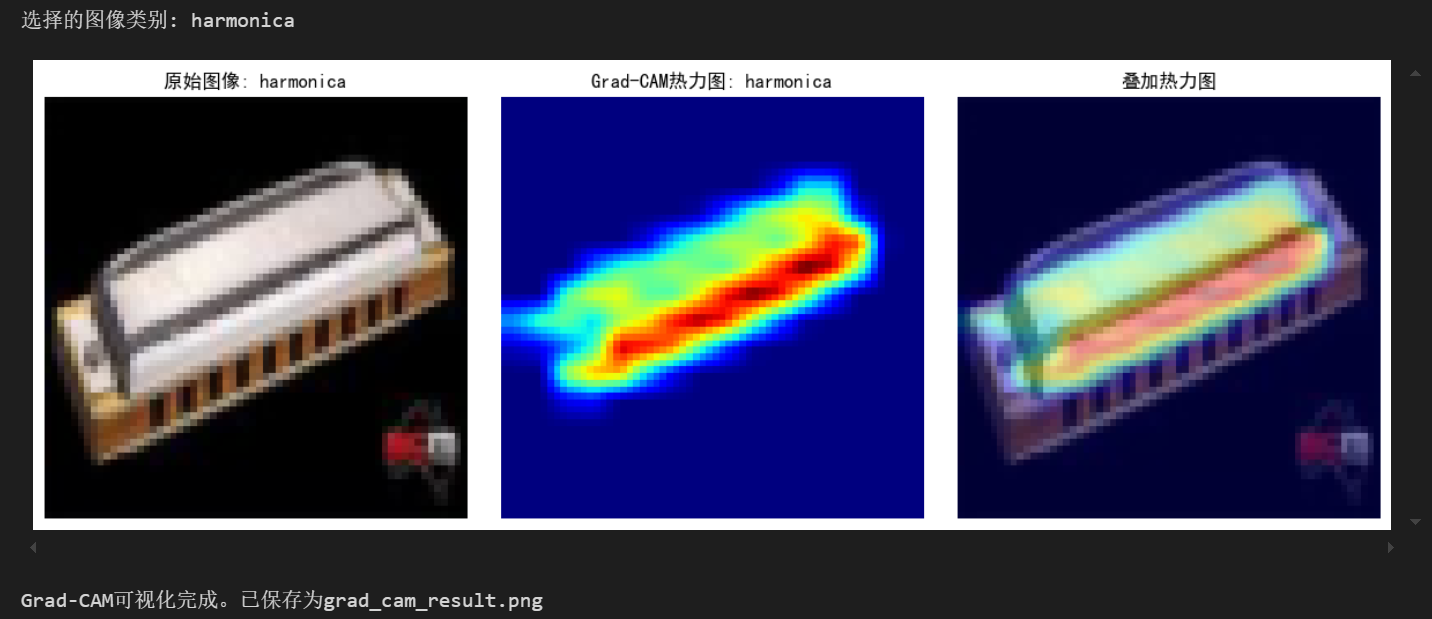
【Python训练营打卡】day43 @浙大疏锦行
DAY 43 复习日 作业: kaggle找到一个图像数据集,用cnn网络进行训练并且用grad-cam做可视化 进阶:并拆分成多个文件 我选择的是music_instruments 链接:Musical Instruments (kaggle.com) #导包 import torch import torch.nn as…...

1-【源码剖析】kafka核心概念
从今天开始开始在csdn上记录学习的笔记,主要包括以下几个方面: kafkaflinkdoris 本系列笔记主要记录Kafka学习相关的内容。在进行kafka源码学习之前,先介绍一下Kafka的核心概念。 消息 消息是kafka中最基本的数据单元,由key和…...
)
JavaScript中判断两个对象是否相同(所有属性的值是否都相同)
在JavaScript中,判断两个对象的所有属性是否相同(包括嵌套对象)需要深度比较(deep comparison)。以下是几种实现方法: 方法1:简易深度比较(不考虑循环引用、Symbol和特殊对象&#x…...