【图像处理3D】:点云图是怎么生成的
点云图是怎么生成的
- **一、点云数据的采集方式**
- **1. 激光雷达(LiDAR)**
- **2. 结构光(Structured Light)**
- **3. 双目视觉(Stereo Vision)**
- **4. 飞行时间相机(ToF Camera)**
- **5. 其他方式**
- **二、点云数据的处理与生成流程**
- **1. 数据预处理**
- **2. 点云增强与特征提取**
- **3. 三维重建与可视化**
- **三、点云图的应用与工具**
- **1. 典型应用领域**
- **2. 常用工具与库**
- **四、总结**
点云图(Point Cloud)是通过采集物体表面或空间中大量离散点的三维坐标(X, Y, Z)及相关属性(如颜色、反射强度等),并将这些点数据可视化后形成的图像。它广泛应用于三维建模、自动驾驶、机器人导航、工业检测、地理测绘等领域。以下是点云图的主要生成方式和技术原理:
一、点云数据的采集方式
点云数据的生成依赖于多种传感器和技术,核心原理是通过测量或计算获取目标物体的三维坐标信息。以下是常见的采集方法:
1. 激光雷达(LiDAR)
- 原理:
激光雷达通过发射激光脉冲并测量其反射回波的时间差(ToF,Time of Flight)或相位差,计算目标物体与传感器之间的距离(Range)。结合激光的扫描角度(水平和垂直方向),可确定每个点的三维坐标(X, Y, Z)。- 若激光雷达配备摄像头,还可通过多传感器融合为点云添加颜色信息(RGB)。
- 应用场景:
自动驾驶(如车载LiDAR)、无人机测绘、工业三维检测、智慧城市建模等。 - 特点:
- 精度高(可达厘米级或毫米级),适合远距离测量(数十米至数百米)。
- 数据量庞大(每秒可生成数万至数百万个点),需后续处理优化。
2. 结构光(Structured Light)
- 原理:
向目标物体投射已知图案(如条纹、网格、随机斑点等)的光源,通过摄像头拍摄物体表面变形后的图案,利用三角测量原理计算像素点的三维坐标。- 核心公式:通过左右摄像头(或单摄像头+投射装置)的视差(Disparity)计算深度,公式为
Z = f *B/d
( Z ) 为深度,
( f ) 为焦距,
( B ) 为基线距离,
( d ) 为视差。
- 核心公式:通过左右摄像头(或单摄像头+投射装置)的视差(Disparity)计算深度,公式为
- 应用场景:
工业零件检测、机器人抓取、医疗成像(如面部扫描)、AR/VR建模等。 - 特点:
- 精度高(亚毫米级),适合中近距离(0.1米~数米)。
- 受环境光干扰较大,需在可控光照条件下使用。
3. 双目视觉(Stereo Vision)
- 原理:
模拟人类双眼的视差原理,通过两个摄像头从不同角度拍摄同一场景,计算图像中对应点的视差,进而推导深度信息。- 步骤:图像校正→特征匹配→视差计算→三维重建。
- 应用场景:
机器人导航、自动驾驶(辅助LiDAR)、无人机避障、影视特效建模等。 - 特点:
- 成本低(仅需摄像头),但算法复杂度高(需解决匹配误差问题)。
- 精度受基线距离和物体距离影响,远距离误差较大。
机器视觉——双目视觉的基础知识(视差深度、标定、立体匹配)
4. 飞行时间相机(ToF Camera)
- 原理:
通过向目标发射连续的调制光(如红外光),测量光信号往返的时间差或相位差,直接计算像素点的深度值。- 分为脉冲式ToF(Pulsed ToF)和相位式ToF(Phase-Based ToF)。
- 应用场景:
手机3D扫描(如Apple FaceID)、智能家居(手势识别)、工业实时检测等。 - 特点:
- 实时性强(可直接输出深度图像),适合动态场景。
- 精度中等(厘米级),受物体反射率和环境光影响较大。
5. 其他方式
- 摄影测量(Photogrammetry):
通过多视角图像(如无人机航拍的多张照片),利用特征点匹配和光束法平差(Bundle Adjustment)计算三维点云,常用于地理测绘和文物数字化。 - 三维扫描仪:
集成激光、结构光或ToF技术的专用设备,如手持式三维扫描仪,用于高精度工业建模。 - 雷达/声呐:
毫米波雷达或超声传感器也可生成点云(如自动驾驶中的雷达点云),但精度低于激光雷达。
二、点云数据的处理与生成流程
采集到原始点云数据后,需经过一系列处理才能形成可用的点云图:
1. 数据预处理
- 去噪:去除离群点(如通过统计滤波、半径滤波)、噪声点(如高斯滤波)。
- 降采样:减少点云数量(如体素网格滤波),提升后续处理效率。
- 坐标转换:将传感器坐标系下的点云转换为全局坐标系(如通过外参矩阵)。
2. 点云增强与特征提取
- 颜色映射:通过摄像头图像为点云添加RGB颜色(需完成相机与LiDAR的外参标定)。
- 法向量计算:估算每个点的表面法向量,用于曲面重建或特征检测。
- 特征提取:提取关键点(如ISS、Harris3D)、几何特征(平面、边缘)等。
3. 三维重建与可视化
- 曲面重建:将离散点云拟合成连续曲面(如三角网格模型,使用Delaunay三角剖分、泊松重建等算法)。
- 点云可视化:通过工具(如CloudCompare、PCL、MATLAB、Python的Open3D库)将点云数据渲染为图像,支持颜色、透明度、光照等参数调整。
三、点云图的应用与工具
1. 典型应用领域
- 自动驾驶:LiDAR点云用于环境感知(障碍物检测、车道线识别)。
- 工业检测:结构光点云用于零件尺寸测量、缺陷检测。
- 智慧城市:激光雷达点云用于建筑建模、电力巡检。
- 机器人:点云用于SLAM(同步定位与地图构建)和路径规划。
2. 常用工具与库
- 开源库:
- PCL(Point Cloud Library):C++主流点云处理库,支持滤波、配准、重建等。
- Open3D:Python/C++库,侧重可视化与高级算法(如ICP配准、神经辐射场NERF)。
- 商业软件:
- CloudCompare:点云可视化与分析工具。
- PolyWorks:工业级三维检测与建模软件。
- MATLAB:点云处理与算法开发。
四、总结
点云图的生成是三维感知技术的核心环节,其原理基于传感器测量、几何计算和数据处理的结合。不同技术(如LiDAR、结构光、双目视觉)在精度、成本、适用场景上各有优劣,实际应用中常通过多传感器融合(如LiDAR+摄像头+IMU)提升性能。随着自动驾驶、元宇宙等领域的发展,点云技术的重要性将持续提升。
相关文章:

【图像处理3D】:点云图是怎么生成的
点云图是怎么生成的 **一、点云数据的采集方式****1. 激光雷达(LiDAR)****2. 结构光(Structured Light)****3. 双目视觉(Stereo Vision)****4. 飞行时间相机(ToF Camera)****5. 其他…...
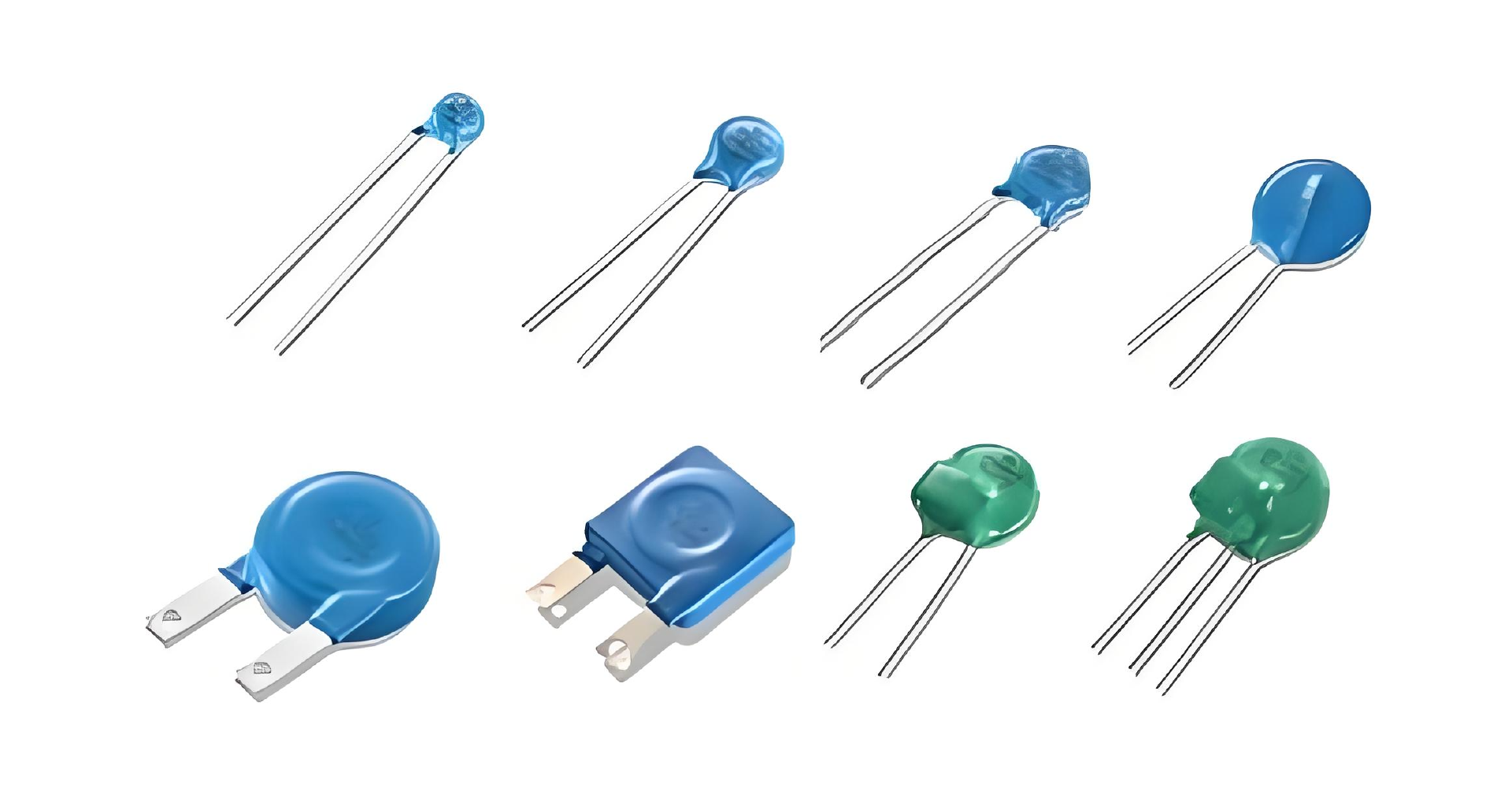
压敏电阻的选型都要考虑哪些因素?同时注意事项都有哪些?
压敏电阻,英文名简称VDR,电子元器件中重要的成员之一,是一种非线性伏安特性的电阻器件,有电阻特性的同时,也拥有其他自身的特性,广泛应用于众多领域。在电源系统、安防系统、浪涌抑制器、电动机保护、汽车电…...

用WPDRRC模型,构建企业安全防线
文章目录 前言什么是 WPDRRC 模型预警(Warning)保护(Protection)检测(Detection)响应(Response)恢复(Recovery)反击(Counterattack) W…...

使用 Amazon Q Developer CLI 快速搭建各种场景的 Flink 数据同步管道
在 AI 和大数据时代,企业通常需要构建各种数据同步管道。例如,实时数仓实现从数据库到数据仓库或者数据湖的实时复制,为业务部门和决策团队分析提供数据结果和见解;再比如,NoSQL 游戏玩家数据,需要转换为 S…...

Java应用服务在Kubernetes集群中的改造与配置
哈喽,大家好,我是左手python! 微服务架构与容器化 微服务架构的优势 微服务架构是一种将应用程序构建为一组小型独立服务的方法。每个服务负责完成特定的业务功能,并且可以独立地进行开发、部署和扩展。这种架构在Kubernetes环境…...

Linux 里 su 和 sudo 命令这两个有什么不一样?
《小菜狗 Linux 操作系统快速入门笔记》目录: 《小菜狗 Linux 操作系统快速入门笔记》(01.0)文章导航目录【实时更新】 Linux 是一个多用户的操作系统。在 Linux 中,理论上来说,我们可以创建无数个用户,但…...

「数据分析 - Pandas 函数」【数据分析全栈攻略:爬虫+处理+可视化+报告】
- 第 105 篇 - Date: 2025 - 06 - 05 Author: 郑龙浩/仟墨 Pandas 核心功能详解与示例 文章目录 Pandas 核心功能详解与示例1. 数据结构基础1.1 Series 创建与操作1.2 DataFrame 创建与操作 2. 数据选择与过滤2.1 基本选择方法2.2 布尔索引 3. 数据处理与清洗3.1 缺失值处理3.…...
JAVASCRIPT 简化版数据库--智能编程——仙盟创梦IDE
// 数据模型class 仙盟创梦数据DM {constructor(key) {this.key ${STORAGE_PREFIX}${key};this.data this.加载数据();}加载数据() {return JSON.parse(localStorage.getItem(this.key)) || [];}保存() {localStorage.setItem(this.key, JSON.stringify(this.data));}新增(it…...

YAML在自动化测试中的三大核心作用
YAML在自动化测试中的三大核心作用 配置中心:管理测试环境/参数 # config.yaml environments:dev: url: "http://dev.api.com"timeout: 5prod:url: "https://api.com"timeout: 10数据驱动:分离测试数据与脚本 # test_data.yaml lo…...
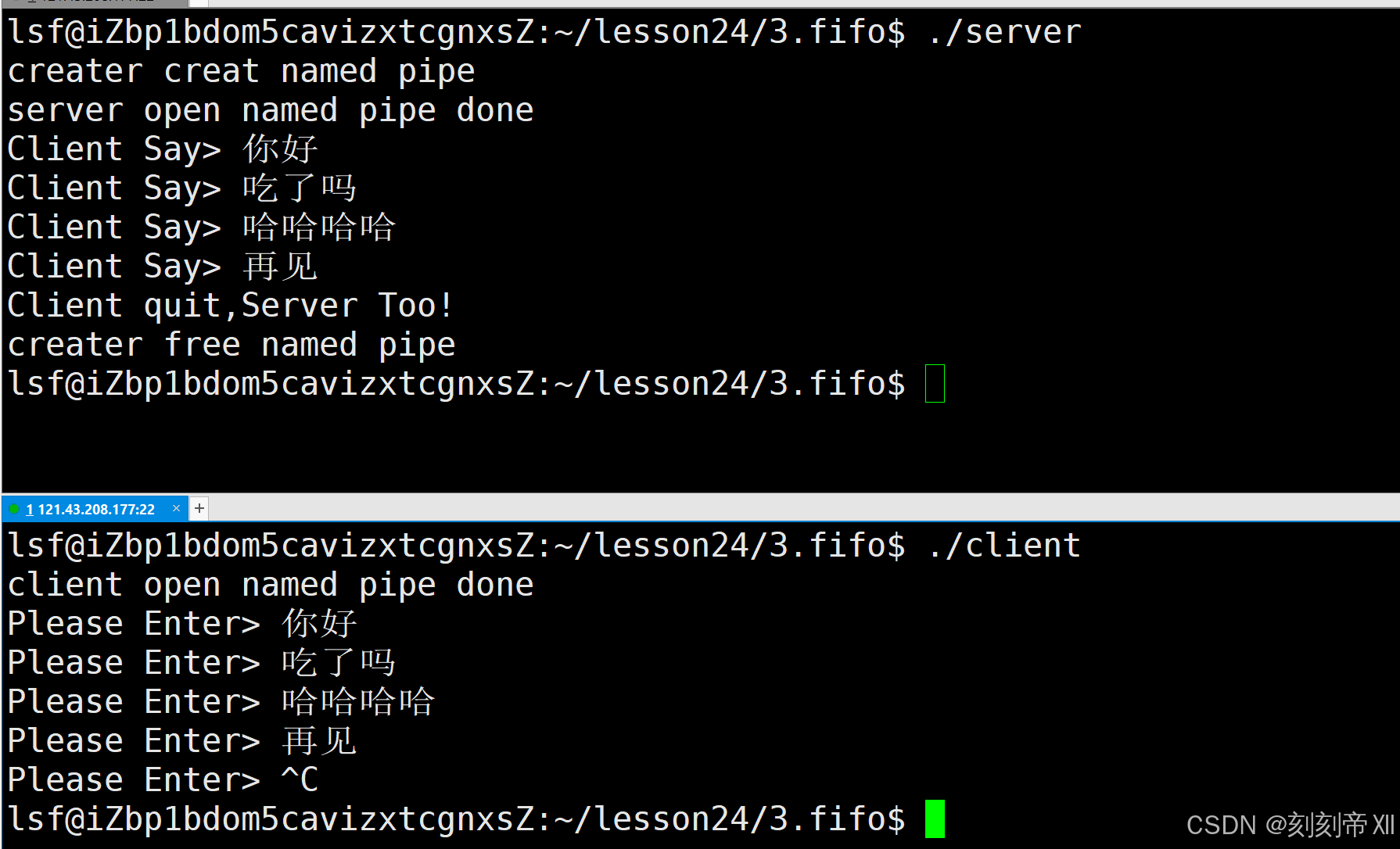
命名管道实现本地通信
目录 命名管道实现通信 命名管道通信头文件 创建命名管道mkfifo 删除命名管道unlink 构造函数 以读方式打开命名管道 以写方式打开命名管道 读操作 写操作 析构函数 服务端 客户端 运行结果 命名管道实现通信 命名管道通信头文件 #pragma#include <iostream> #include &l…...
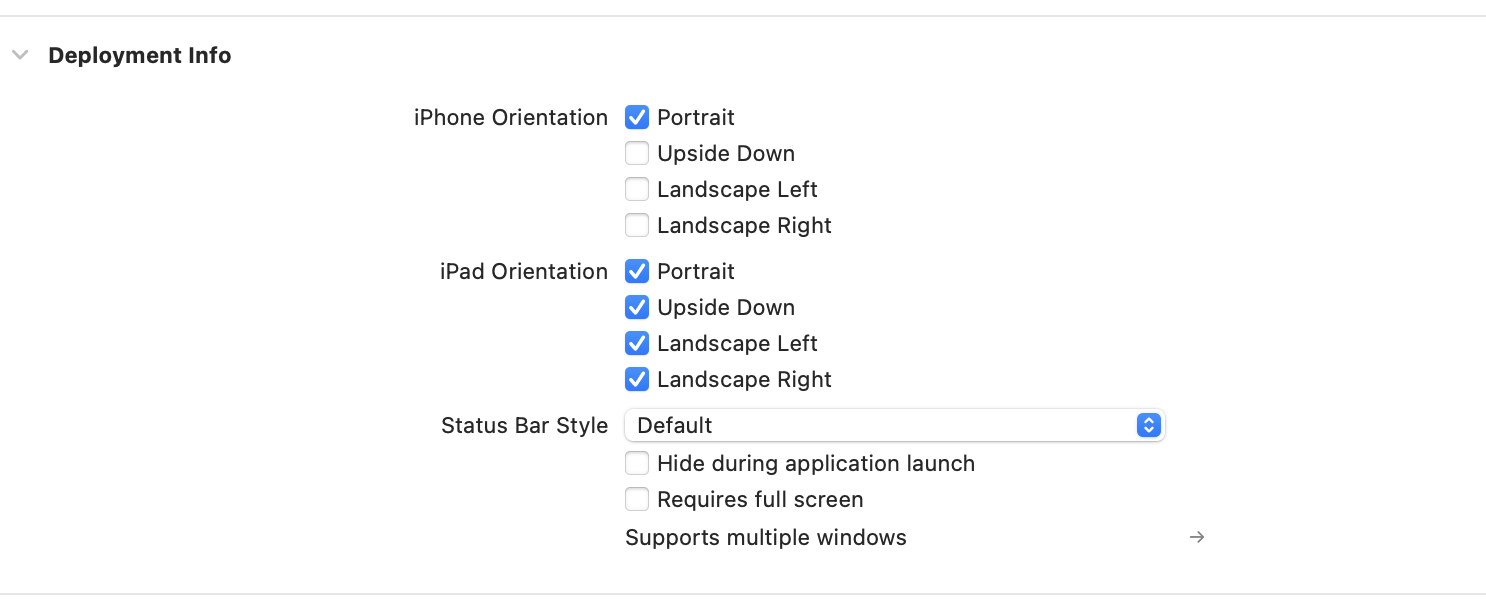
iOS上传应用包错误问题 “Invalid bundle. The “UIInterfaceOrientationPortrait”“
引言 在开发 iOS 应用的整个生命周期中,打包上传到 App Store 是一个至关重要的步骤。每一次提交,Xcode 都会在后台执行一系列严格的校验流程,包括对 Info.plist 配置的检查、架构兼容性的验证、资源完整性的审查等。如果某些关键项配置不当…...
)
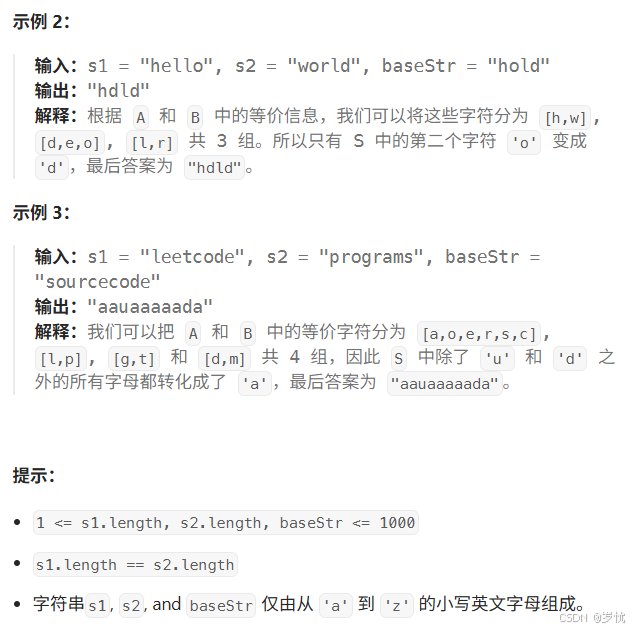
【LeetCode】1061. 按字典序排列最小的等效字符串(并查集)
LeetCode 1061. 按字典序排列最小的等效字符串 (中等) 题目链接:LeetCode 1061. 按字典序排列最小的等效字符串 (中等) 题目描述 给出长度相同的两个字符串s1 和 s2 ,还有一个字符串 baseStr 。 其中 s1[i] 和 s2[i] 是一组等价字符。 举个例子&#…...
猎板厚铜PCB工艺能力如何?
在电子产业向高功率、高集成化狂奔的今天,电路板早已不是沉默的配角。当5G基站、新能源汽车、工业电源等领域对电流承载、散热效率提出严苛要求时,一块能够“扛得住大电流、耐得住高温”的厚铜PCB,正成为决定产品性能的关键拼图。而在这条赛道…...
Flutter快速上手,入门教程
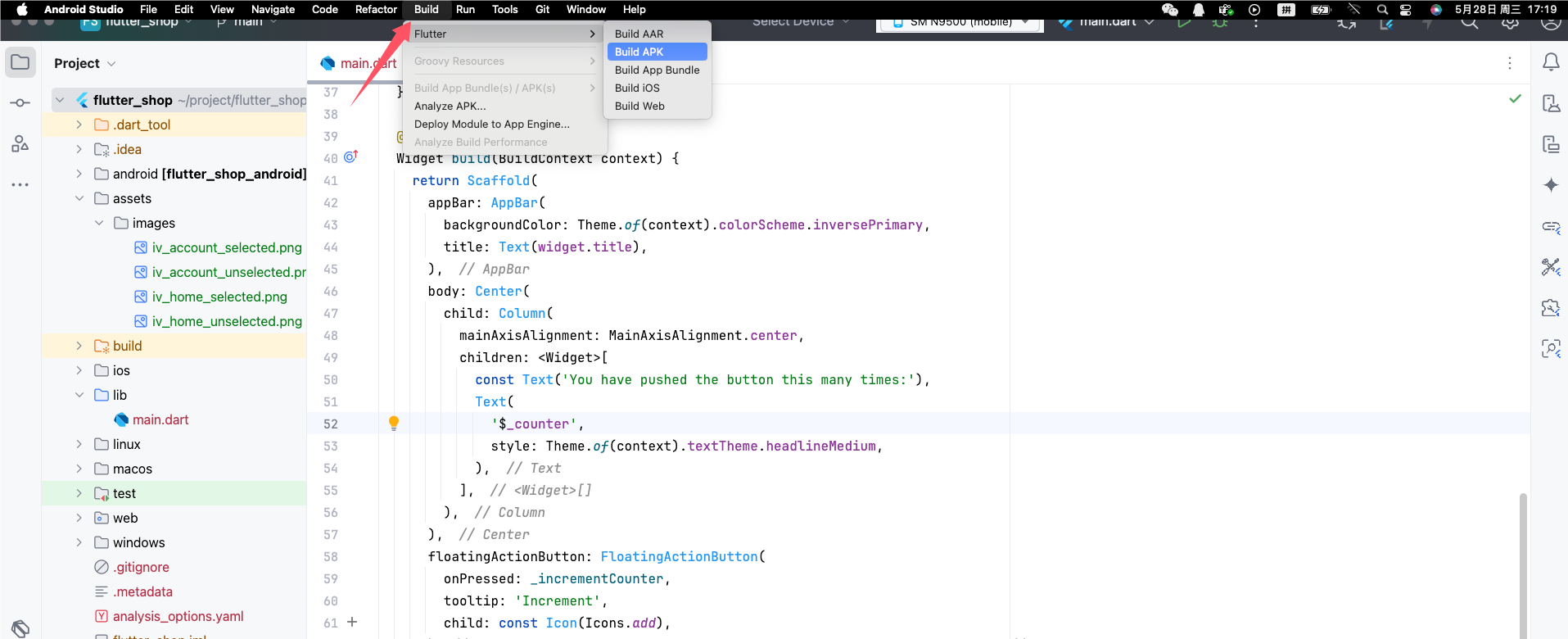
目录 一、参考文档 二、准备工作 下载Flutter SDK: 配置环境 解决环境报错 zsh:command not found:flutter 执行【flutter doctor】测试效果 安装Xcode IOS环境 需要安装brew,通过brew安装CocoaPods. 复制命令行,打开终端 分别执行…...
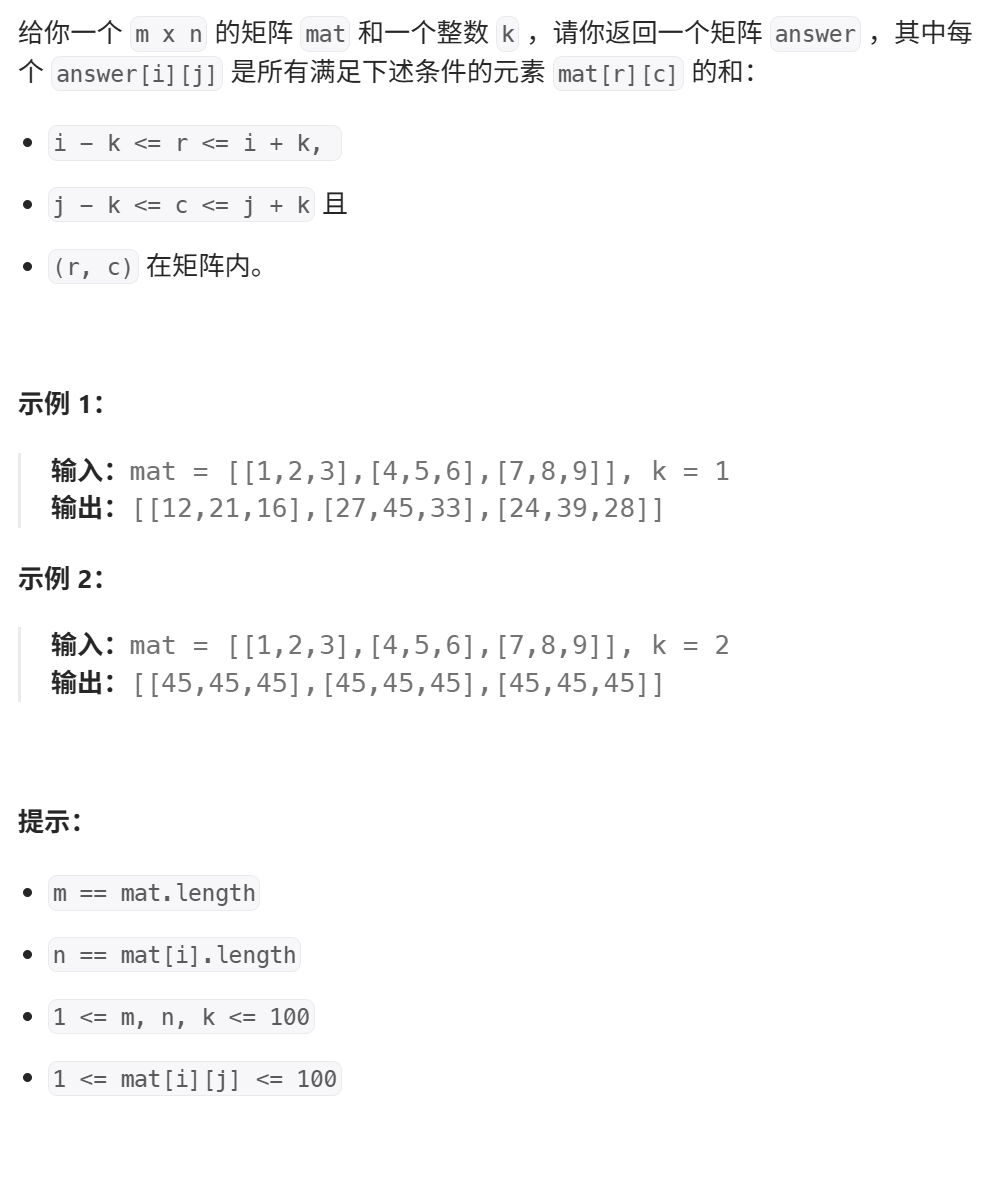
算法:前缀和
1.【模版】前缀和 【模板】前缀和_牛客题霸_牛客网 这道题如果使用暴力解法时间复杂度为O(n*m),会超时,所以要使用前缀和算法。 前缀和->快速求出数组中某一个连续区间的和。 第一步:预处理出一个前缀和数组 dp。 dp[i]表示[1, i] 区间…...
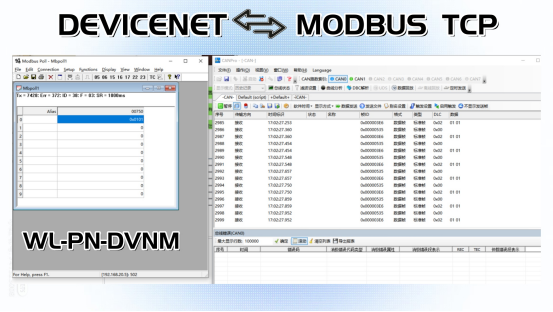
DEVICENET转MODBUS TCP网关与AB数据输出模块的高效融合方案研究
在工业自动化领域,多样化的设备通常采用不同的通信协议,这为系统集成带来了显著的挑战。特别是在需要将遵循DeviceNet协议的设备与基于MODBUS TCP协议的系统进行互连时,这一挑战尤为突出。AB数据输出作为一种功能卓越的DeviceNet分布式输入/输…...
牛客小白月赛113
前言:这场的E题补的我头皮都发麻了。 A. 2025 题目大意:一个仅有‘-’‘*’组成的字符串,初始有一个sum 1, 从左到右依次遍历字符串,遇到-就让sum--;遇到*就让sum* 2,问sum有没有可能大于等于…...
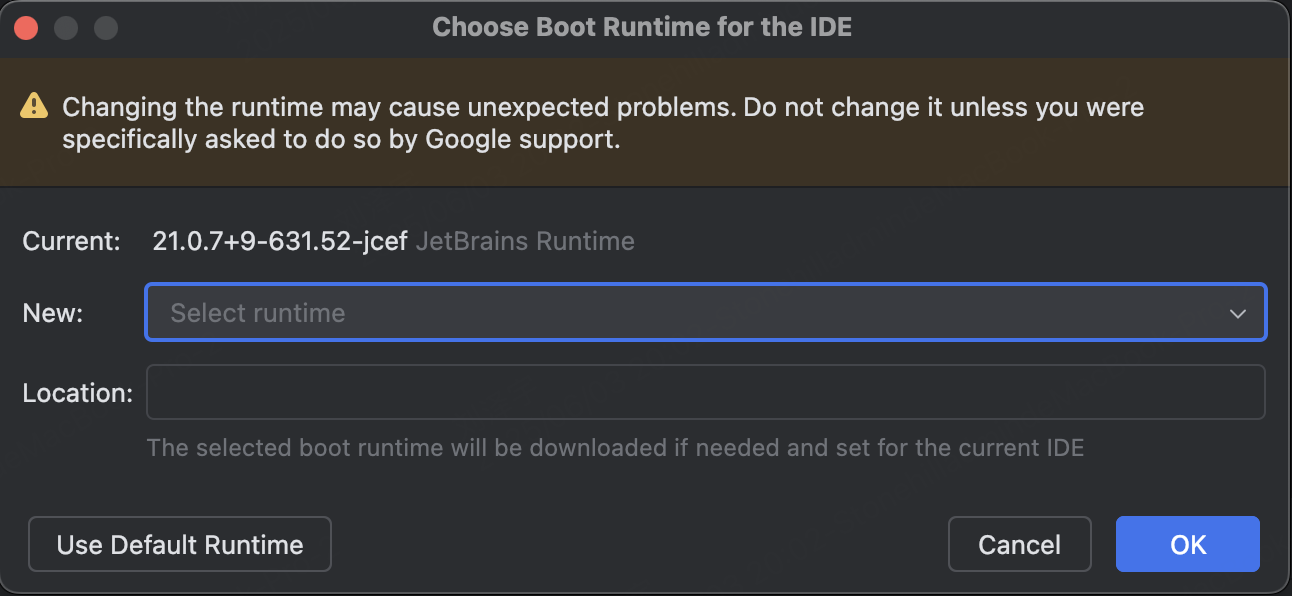
Mac版本Android Studio配置LeetCode插件
第一步:Android Studio里面找到Settings,找到Plugins,在Marketplace里面搜索LeetCode Editor。 第二步:安装对应插件,并在Tools->LeetCode Plugin页面输入帐号和密码。 理论上,应该就可以使用了。但是&a…...
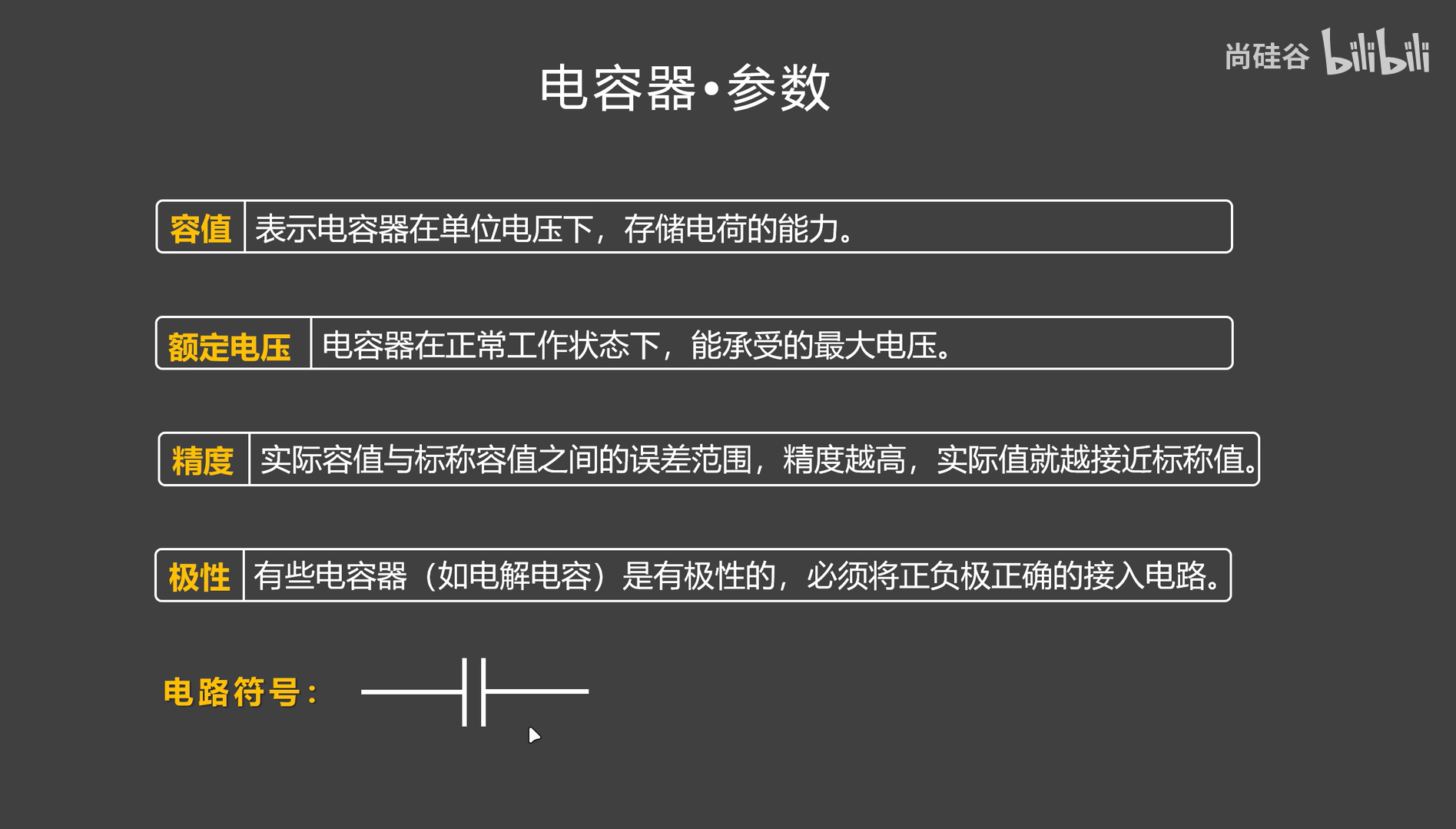
电子电路基础1(杂乱)
电路基础知识 注意:电压源与电流源的表现形式 注意:在同一根导线上电势相等 电阻电路的等效变换 电子元器件基础 电阻...

rocketmq延迟消息的底层原理浅析
rocketmq延迟消息的底层原理 消息实体 延时消息是指允许消息在指定延迟时间后才被消费者消费 Apache RocketMQ 中,消息的核心实体类是 org.apache.rocketmq.common.message.Message public class Message implements Serializable {private String topic; …...

【openssl】升级为3.3.1,避免安全漏洞
本文档旨在形成 对Linux系统openssl版本进行升级 的搭建标准操作过程,搭建完成后,实现 openssl 达到3.3以上版本,避免安全漏洞 效果。 一、查看当前版本 版本不高于3.1的,均需要升级。 # 服务器上运行以下命令,查看…...
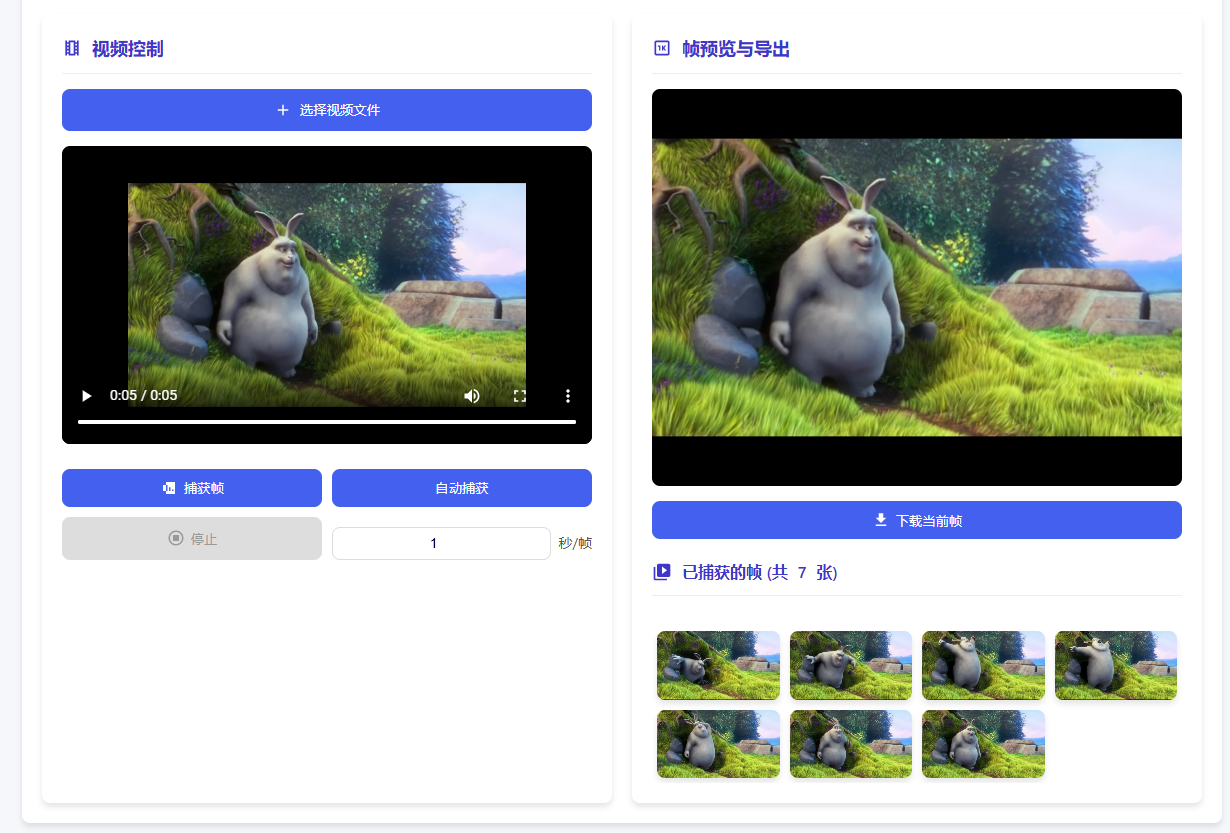
使用 HTML +JavaScript 从零构建视频帧提取器
在视频编辑、内容分析和多媒体处理领域,常常需要从视频中提取关键帧。手动截取不仅效率低下,还容易遗漏重要画面。本文介绍的视频帧提取工具通过 HTML5 技术栈实现了一个完整的浏览器端解决方案,用户可以轻松选择视频文件并进行手动或自动帧捕…...

基于若依前后分离版-用户密码错误锁定
sys_config配置参数 user.password.maxRetryCount:最大错误次数 user.password.lockTime:锁定时长 //SysLoginController//登录 PostMapping("/login") public AjaxResult login(RequestBody LoginBody loginBody) {AjaxResult ajax AjaxR…...
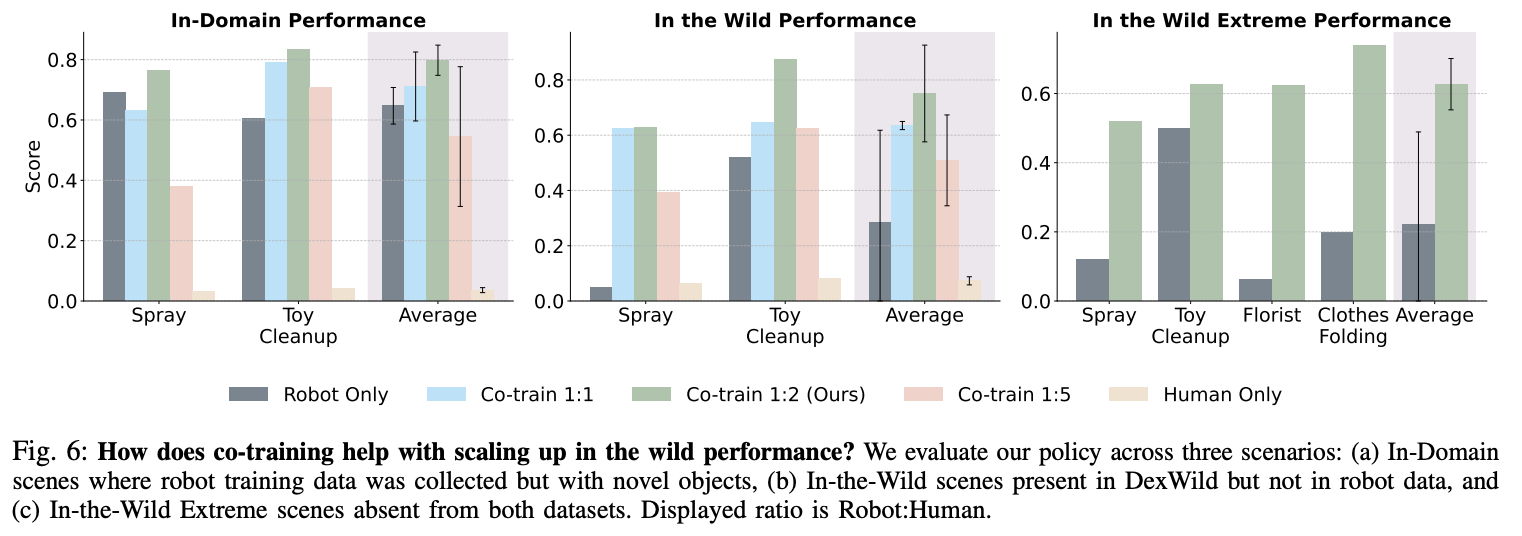
论文速读《DexWild:野外机器人策略的灵巧人机交互》
项目链接:https://dexwild.github.io/ 论文链接:https://arxiv.org/pdf/2505.07813 0. 简介 2025年5月,卡内基梅隆大学(CMU)发布了一篇突破性论文《DexWild: Dexterous Human Interactions for In-the-Wild Robot Pol…...
Bug问题
一、list 页面 import React, { useEffect, useState } from react; import { shallowEqual, useHistory, useSelector } from dva; import { Button, message } from choerodon-ui/pro; import formatterCollections from hzero-front/lib/utils/intl/formatterCollections; …...

【数据结构】5. 双向链表
文章目录 一、链表的分类1、双向链表的结构 二、双向链表的实现0、准备工作1、初始化2、打印3、尾插4、头插5、尾删6、头删7、查找8、在指定位置之后插入数据9、删除指定位置10、销毁 一、链表的分类 链表总共分为8种,具体的分组方式如图所示: 带头指的…...
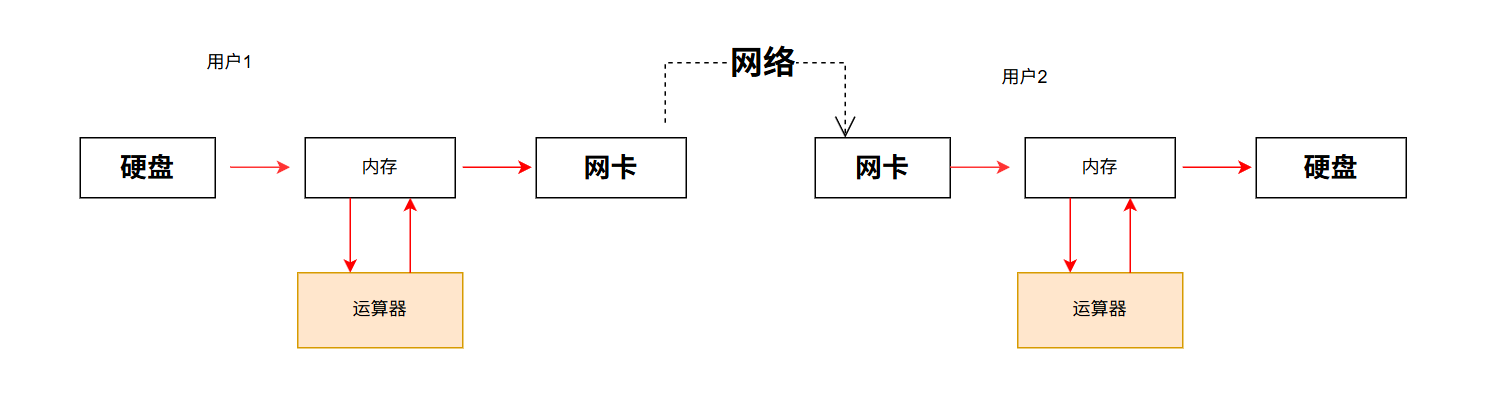
【Linux手册】冯诺依曼体系结构
目录 前言 五大组件 数据信号 存储器(内存)有必要吗 常见面试题 前言 冯诺依曼体系结构是当代计算机基本架构,冯诺依曼体系有五大组件,通过这五大组件直观的描述了计算机的工作原理;学习冯诺依曼体系可以让给我们更…...
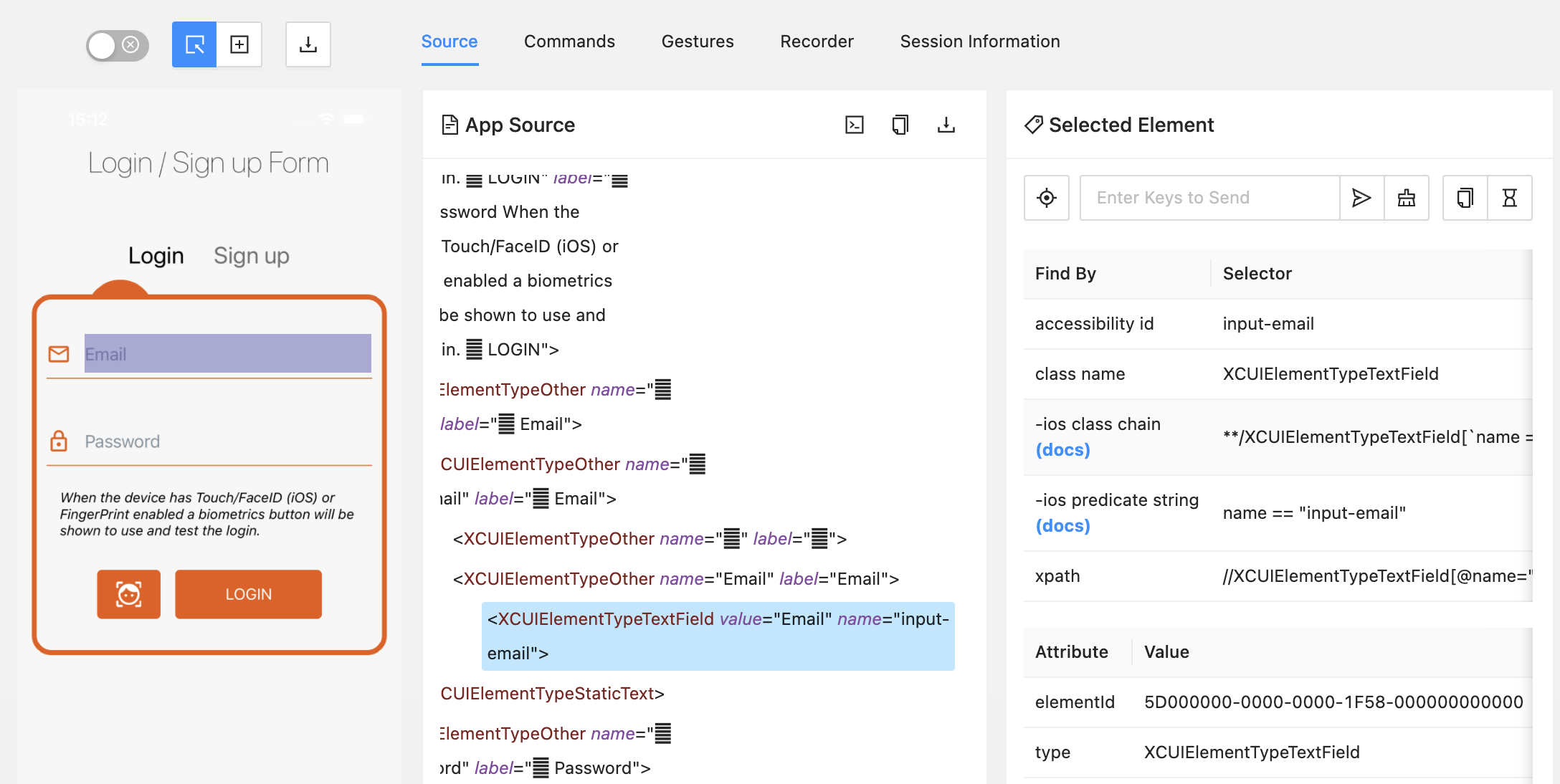
Mobile App UI自动化locator
在开展mobile app UI层自动化测试时,编写目标元素的locator是比较耗时的一个环节,弄清楚locator背后的逻辑,可以有效降低UI层测试维护成本。此篇博客以webdriverioappium作为UI自动化工具为例子,看看有哪些selector方法࿰…...
)
PaloAlto-Expedition OS命令注入漏洞复现(CVE-2025-0107)
免责申明: 本文所描述的漏洞及其复现步骤仅供网络安全研究与教育目的使用。任何人不得将本文提供的信息用于非法目的或未经授权的系统测试。作者不对任何由于使用本文信息而导致的直接或间接损害承担责任。如涉及侵权,请及时与我们联系,我们将尽快处理并删除相关内容。 前…...
(LeetCode 每日一题) 1061. 按字典序排列最小的等效字符串 (并查集)
题目:1061. 按字典序排列最小的等效字符串 思路:使用并查集,来将等价的字符连起来,形成一棵树。这棵树最小的字母,就代表整颗树,时间复杂度0(n),细节看注释。 C版本: class Solutio…...