使用 OpenCV (C++) 进行人脸边缘提取
使用 OpenCV (C++) 进行人脸边缘提取
本文将介绍如何使用 C++ 和 OpenCV 库来检测图像中的人脸,并提取这些区域的边缘。我们将首先使用 Haar级联分类器进行人脸检测,然后在检测到的人脸区域(ROI - Region of Interest)内应用 Canny 边缘检测算法。
目录
- 简介
- 先决条件
- 步骤概览
- 代码实现
- 代码详解
- 编译与运行
- 结果展示
- 注意事项与改进
简介
人脸边缘提取结合了人脸检测和边缘检测两大图像处理技术。首先定位图像中的人脸,然后对这些人脸区域进行边缘化处理,从而突出人脸的轮廓特征。这在许多计算机视觉应用中非常有用,例如特征提取、人脸识别预处理等。
先决条件
- C++ 编译器: 如 G++。
- OpenCV 库: 需要正确安装并配置好编译环境。本文示例基于 OpenCV 4.x,但稍作修改也可适用于 OpenCV 3.x。
- Haar 级联分类器 XML 文件: OpenCV 自带了预训练的人脸检测模型,通常名为
haarcascade_frontalface_default.xml或haarcascade_frontalface_alt.xml。你需要提供此文件的正确路径。
步骤概览
- 加载图像: 从文件加载输入图像。
- 加载人脸检测器: 加载预训练的 Haar 级联分类器用于人脸检测。
- 灰度转换: 将彩色图像转换为灰度图像,因为人脸检测和 Canny 边缘检测通常在灰度图上进行。
- 人脸检测: 在灰度图像上检测人脸,获取人脸区域的矩形框。
- 边缘提取:
- 对于每个检测到的人脸矩形框,提取该区域作为 ROI。
- 对该 ROI 应用高斯模糊以减少噪声。
- 对模糊后的 ROI 应用 Canny 边缘检测算法。
- 结果显示: 在原图上绘制人脸矩形框,并显示提取到的人脸边缘。
代码实现
#include <opencv2/opencv.hpp>
#include <opencv2/objdetect.hpp> // 用于人脸检测
#include <opencv2/imgproc.hpp> // 用于图像处理,如 Canny#include <iostream>
#include <string>
#include <vector>int main() {// 1. 加载图像std::string imagePath = "your_image.jpg"; // <--- 修改为你的图片路径cv::Mat image = cv::imread(imagePath);if (image.empty()) {std::cerr << "错误: 无法加载图像 " << imagePath << std::endl;return -1;}// 2. 加载 Haar 级联分类器std::string cascadePath = "haarcascade_frontalface_default.xml"; // <--- 修改为你的 XML 文件路径cv::CascadeClassifier faceCascade;if (!faceCascade.load(cascadePath)) {std::cerr << "错误: 无法加载 Haar 级联分类器 " << cascadePath << std::endl;std::cerr << "请确保 XML 文件路径正确,并且该文件存在。" << std::endl;std::cerr << "通常可以在 OpenCV 安装目录下的 'data/haarcascades/' 找到。" << std::endl;return -1;}// 3. 转换为灰度图cv::Mat grayImage;cv::cvtColor(image, grayImage, cv::COLOR_BGR2GRAY);// (可选) 直方图均衡化,有时能改善检测效果cv::equalizeHist(grayImage, grayImage);// 4. 人脸检测std::vector<cv::Rect> faces;// detectMultiScale 参数:// grayImage: 输入灰度图// faces: 检测到的人脸矩形框// 1.1: scaleFactor -每次图像缩小的比例// 3: minNeighbors -构成检测目标的相邻矩形的最小数量// 0 | cv::CASCADE_SCALE_IMAGE: flags - 老版本 OpenCV 使用的标志,对于新版本可以省略或使用默认// cv::Size(30, 30): minSize -检测的最小人脸尺寸faceCascade.detectMultiScale(grayImage, faces, 1.1, 3, 0 | cv::CASCADE_SCALE_IMAGE, cv::Size(30, 30));if (faces.empty()) {std::cout << "未检测到人脸。" << std::endl;}// 创建一个黑色背景的图像用于显示提取的边缘cv::Mat faceEdgesDisplay = cv::Mat::zeros(image.size(), CV_8UC1); // 单通道用于边缘// 5. 对每个人脸区域进行边缘提取for (size_t i = 0; i < faces.size(); ++i) {// 获取人脸 ROIcv::Rect faceRect = faces[i];cv::Mat faceROI_gray = grayImage(faceRect); // 从灰度图中提取ROI// (可选) 对 ROI 应用高斯模糊以减少噪声,改善 Canny 效果cv::Mat blurredROI;cv::GaussianBlur(faceROI_gray, blurredROI, cv::Size(5, 5), 1.5, 1.5);// 对 ROI 应用 Canny 边缘检测cv::Mat edgesROI;// Canny 参数:// blurredROI: 输入图像 (单通道)// edgesROI: 输出的边缘图像// 50: threshold1 - 第一个阈值// 150: threshold2 - 第二个阈值// 3: apertureSize - Sobel算子核大小 (默认为3)cv::Canny(blurredROI, edgesROI, 50, 150, 3);// 将提取的边缘绘制到 faceEdgesDisplay 的对应位置edgesROI.copyTo(faceEdgesDisplay(faceRect));// 在原始彩色图像上绘制人脸矩形框cv::rectangle(image, faceRect, cv::Scalar(0, 255, 0), 2); // 绿色矩形框cv::putText(image, "Face " + std::to_string(i+1), cv::Point(faceRect.x, faceRect.y - 5),cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 255, 0), 1);}// 6. 显示结果cv::imshow("原始图像与检测到的人脸", image);if (!faces.empty()) {cv::imshow("提取的人脸边缘", faceEdgesDisplay);}std::cout << "按任意键退出..." << std::endl;cv::waitKey(0);cv::destroyAllWindows();return 0;
}
代码详解
-
包含头文件:
opencv2/opencv.hpp: 核心 OpenCV 功能。opencv2/objdetect.hpp: 包含CascadeClassifier用于对象检测(如此处的人脸)。opencv2/imgproc.hpp: 图像处理函数,如cvtColor,GaussianBlur,Canny。<iostream>,<string>,<vector>: C++ 标准库。
-
加载图像 (
cv::imread):
读取指定路径的图像文件。如果失败,image.empty()会返回true。 -
加载 Haar 级联分类器 (
cv::CascadeClassifier::load):
加载预训练的人脸检测模型。XML 文件路径需要正确。这个文件通常位于 OpenCV 安装目录下的data/haarcascades/文件夹中。 -
灰度转换 (
cv::cvtColor):
cv::COLOR_BGR2GRAY将 BGR (OpenCV 默认颜色顺序) 图像转换为单通道灰度图像。 -
直方图均衡化 (
cv::equalizeHist):
这是一个可选步骤,有时可以增强图像对比度,从而提高人脸检测的准确性,特别是在光照条件不佳的情况下。 -
人脸检测 (
cv::CascadeClassifier::detectMultiScale):
此函数在灰度图像中检测不同大小的对象。faces: 是一个std::vector<cv::Rect>,存储检测到的每个人脸的矩形边界框。scaleFactor: 表示在每个图像尺度上图像尺寸减小的程度。例如,1.1 表示缩小10%。minNeighbors: 指定每个候选矩形应该有多少个邻居才能保留它。较高的值可以减少误报,但可能会漏掉一些人脸。minSize: 检测到的对象的最小可能尺寸。小于此尺寸的对象将被忽略。
-
遍历检测到的人脸:
对faces向量中的每个cv::Rect进行处理。 -
提取 ROI (
cv::Mat faceROI_gray = grayImage(faceRect)):
从灰度图像中提取出人脸所在的矩形区域。后续的边缘检测将只在这个 ROI 上进行。 -
高斯模糊 (
cv::GaussianBlur):
在应用 Canny 边缘检测之前,通常会使用高斯模糊来平滑图像,以减少噪声对边缘检测结果的影响。cv::Size(5, 5)是高斯核的大小,1.5是 X 和 Y 方向上的高斯核标准差。 -
Canny 边缘检测 (
cv::Canny):
这是最常用的边缘检测算法之一。threshold1和threshold2: 是两个阈值。低于threshold1的边缘会被抑制,高于threshold2的边缘会被认为是强边缘。介于两者之间的边缘如果连接到强边缘,则被保留。调整这两个阈值可以改变边缘检测的敏感度。
-
结果合成与绘制:
edgesROI.copyTo(faceEdgesDisplay(faceRect)): 将在faceROI_gray上检测到的边缘 (edgesROI) 复制到与原图同样大小的黑色图像faceEdgesDisplay的相应位置。这样,faceEdgesDisplay最终只包含人脸区域的边缘。cv::rectangle: 在原始彩色图像上用绿色矩形框标出检测到的人脸。cv::putText: 在矩形框旁边添加标签。
-
显示图像 (
cv::imshow,cv::waitKey,cv::destroyAllWindows):
显示带有标记的原始图像和只包含人脸边缘的图像。cv::waitKey(0)等待用户按键,然后cv::destroyAllWindows()关闭所有 OpenCV 创建的窗口。
编译与运行
假设你的 C++ 文件名为 face_edge_detection.cpp,并且你的 OpenCV 库已正确安装。
Linux / macOS (使用 g++):
你需要使用 pkg-config 来获取 OpenCV 的编译和链接标志。
g++ face_edge_detection.cpp -o face_edge_detector $(pkg-config --cflags --libs opencv4)
./face_edge_detector
如果你的 OpenCV 版本不是 4.x,或者 pkg-config 配置的是旧版本,你可能需要使用 opencv 替换 opencv4。
Windows (使用 Visual Studio):
你需要配置项目的包含目录、库目录,并链接相应的 OpenCV 库文件 (例如 opencv_core4xx.lib, opencv_imgcodecs4xx.lib, opencv_highgui4xx.lib, opencv_objdetect4xx.lib, opencv_imgproc4xx.lib 等,其中 4xx 是你的 OpenCV 版本号)。
CMake (推荐的跨平台方式):
创建一个 CMakeLists.txt 文件:
cmake_minimum_required(VERSION 3.10)
project(FaceEdgeDetector)set(CMAKE_CXX_STANDARD 11) # 或更高版本find_package(OpenCV REQUIRED)include_directories(${OpenCV_INCLUDE_DIRS})add_executable(face_edge_detector face_edge_detection.cpp)
target_link_libraries(face_edge_detector ${OpenCV_LIBS})
然后编译:
mkdir build
cd build
cmake ..
make # 或者在 Visual Studio 中打开生成的项目并编译
./face_edge_detector # 或者运行生成的可执行文件
重要:
- 确保将代码中的
"your_image.jpg"替换为你要处理的实际图像文件的路径。 - 确保将代码中的
"haarcascade_frontalface_default.xml"替换为你的 Haar 级联分类器 XML 文件的实际路径。通常,此文件可以在 OpenCV 安装目录下的data/haarcascades/文件夹中找到。如果找不到,可以从 OpenCV 的 GitHub 仓库下载。
结果展示
运行程序后,你将会看到两个窗口:
- “原始图像与检测到的人脸”: 显示原始图像,并在检测到的人脸周围绘制绿色矩形框和标签。
- “提取的人脸边缘”: 显示一个黑色背景的图像,其中只有检测到的人脸区域会显示其 Canny 边缘。
(这是一个占位符图片,实际效果会根据你的输入图像而变化)
注意事项与改进
- Haar 级联分类器路径: 确保
haarcascade_frontalface_default.xml(或其他选择的级联分类器文件) 的路径是正确的。这是最常见的错误来源之一。 - 检测参数调整:
detectMultiScale的scaleFactor,minNeighbors,minSize参数对检测结果影响很大。你可能需要根据图像的特性进行调整以获得最佳效果。- Canny 算法的两个阈值
threshold1和threshold2也需要根据具体图像和期望的边缘细节程度进行调整。
- 不同的人脸检测器:
- 除了 Haar 级联分类器,OpenCV 还支持 LBP (Local Binary Patterns) 级联分类器,通常速度更快但精度可能稍低。对应的 XML 文件通常包含
lbpcascade_前缀。 - 对于更高精度的人脸检测,可以考虑使用基于深度学习的方法,例如 OpenCV DNN 模块加载预训练的 Caffe、TensorFlow 或 ONNX 模型。但这会增加实现的复杂度。
- 除了 Haar 级联分类器,OpenCV 还支持 LBP (Local Binary Patterns) 级联分类器,通常速度更快但精度可能稍低。对应的 XML 文件通常包含
- 光照和姿态: Haar 级联分类器对光照变化和人脸姿态比较敏感。对于非正面、有遮挡或光照不佳的人脸,检测效果可能会下降。
- 性能: 对于视频流处理,需要关注性能。LBP 分类器或在 GPU 上运行的 DNN 模型可能更合适。
希望这个教程能帮助你理解如何使用 OpenCV 和 C++ 实现人脸边缘提取!
相关文章:
 进行人脸边缘提取)
使用 OpenCV (C++) 进行人脸边缘提取
使用 OpenCV (C) 进行人脸边缘提取 本文将介绍如何使用 C 和 OpenCV 库来检测图像中的人脸,并提取这些区域的边缘。我们将首先使用 Haar级联分类器进行人脸检测,然后在检测到的人脸区域(ROI - Region of Interest)内应用 Canny 边…...

C# 委托UI控件更新例子,何时需要使用委托
1. 例子1 private void UdpRxCallBackFunc(UdpDataStruct info) {// 1. 前置检查防止无效调用if (textBoxOutput2.IsDisposed || !textBoxOutput2.IsHandleCreated)return;// 2. 使用正确的委托类型Invoke(new Action(() >{// 3. 双重检查确保安全if (textBoxOutput2.IsDis…...

大模型数据流处理实战:Vue+NDJSON的Markdown安全渲染架构
在Vue中使用HTTP流接收大模型NDJSON数据并安全渲染 在构建现代Web应用时,处理大模型返回的流式数据并安全地渲染到页面是一个常见需求。本文将介绍如何在Vue应用中通过普通HTTP流接收NDJSON格式的大模型响应,使用marked、highlight.js和DOMPurify等库进…...
python项目如何创建docker环境
这里写自定义目录标题 python项目创建docker环境docker配置国内镜像源构建一个Docker 镜像验证镜像合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPant…...

Eureka 高可用集群搭建实战:服务注册与发现的底层原理与避坑指南
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...
PyTorch--池化层(4)
池化层(Pooling Layer) 用于降低特征图的空间维度,减少计算量和参数数量,同时保留最重要的特征信息。 池化作用:比如1080p视频——720p 池化层的步长默认是卷积核的大小 ceil 允许有出界部分;floor 不允许…...

GPU加速与非加速的深度学习张量计算对比Demo,使用PyTorch展示关键差异
import torch import time # 创建大型随机张量 (10000x10000) tensor_size 10000 x_cpu torch.randn(tensor_size, tensor_size) x_gpu x_cpu.cuda() # 转移到GPU # CPU矩阵乘法 start time.time() result_cpu torch.mm(x_cpu, x_cpu.t()) cpu_time time.time() - sta…...

Vue中的自定义事件
一、前言 在 Vue 的组件化开发中,组件之间的数据通信是构建复杂应用的关键。而其中最常见、最推荐的方式之一就是通过 自定义事件(Custom Events) 来实现父子组件之间的交互。 本文将带你深入了解: Vue 中事件的基本概念如何在…...
2025年大模型平台落地实践研究报告|附75页PDF文件下载
本报告旨在为各行业企业在建设落地大模型平台的过程中,提供有效的参考和指引,助力大模型更高效更有价值地规模化落地。本报告系统性梳理了大模型平台的发展背景、历程和现状,结合大模型平台的特点提出了具体的落地策略与路径,同时…...
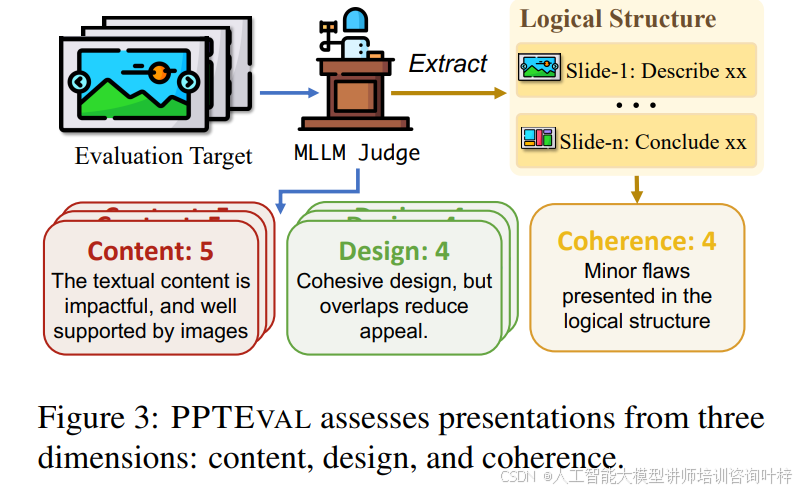
PPTAGENT:让PPT生成更智能
想要掌握如何将大模型的力量发挥到极致吗?叶梓老师带您深入了解 Llama Factory —— 一款革命性的大模型微调工具。 1小时实战课程,您将学习到如何轻松上手并有效利用 Llama Factory 来微调您的模型,以发挥其最大潜力。 CSDN教学平台录播地址…...

Kotlin 中 companion object 扩展函数和普通函数区别
在 Kotlin 中,companion object 的扩展函数与普通函数(包括普通成员函数和普通扩展函数)有显著区别。以下是它们的核心差异和适用场景: 1. 定义位置与归属 特性companion object 扩展函数普通函数定义位置在类外部为伴生对象添加…...
《汇编语言》第13章 int指令
中断信息可以来自 CPU 的内部和外部,当 CPU 的内部有需要处理的事情发生的时候,将产生需要马上处理的中断信息,引发中断过程。在第12章中,我们讲解了中断过程和两种内中断的处理。 这一章中,我们讲解另一种重要的内中断…...
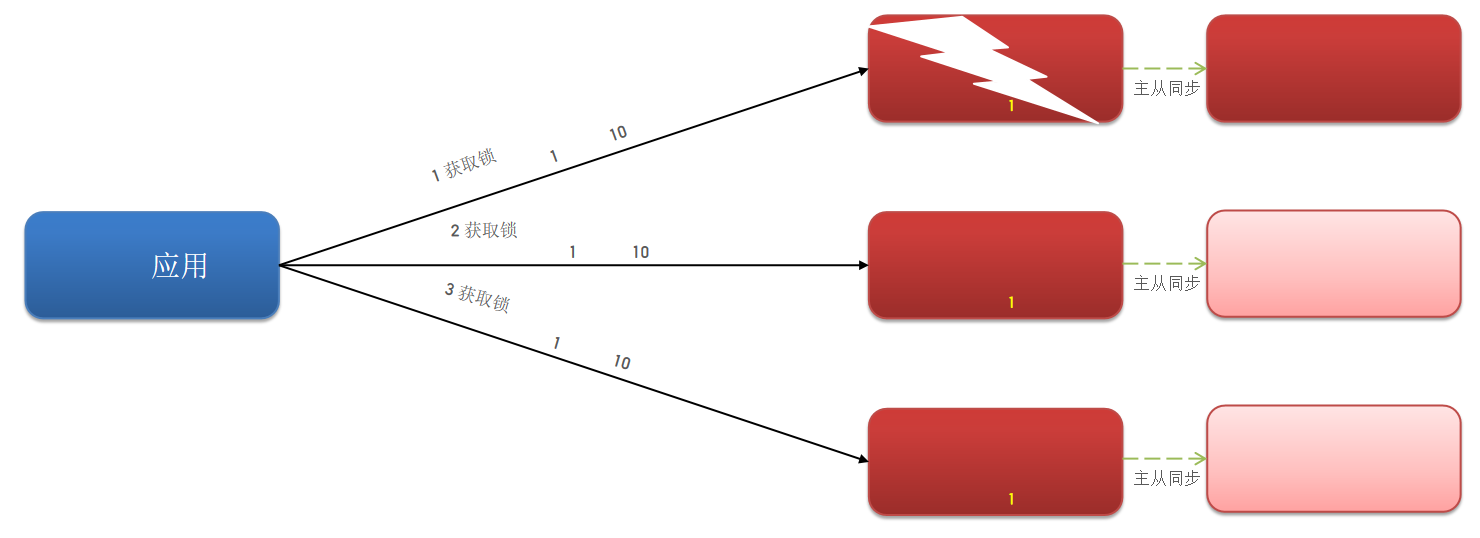
Redis实战-基于redis和lua脚本实现分布式锁以及Redission源码解析【万字长文】
前言: 在上篇博客中,我们探讨了单机模式下如何通过悲观锁(synchronized)实现"一人一单"功能。然而,在分布式系统或集群环境下,单纯依赖JVM级别的锁机制会出现线程并发安全问题,因为这…...

Ubuntu崩溃修复方案
当Ubuntu系统崩溃时,可依据崩溃类型(启动失败、运行时崩溃、完全无响应)选择以下修复方案。以下方法综合了官方推荐和社区实践,按操作风险由低到高排序: 一、恢复模式(Recovery Mode) 适用场景:系统启动卡顿、登录后黑屏、软件包损坏等。 操作步骤: …...
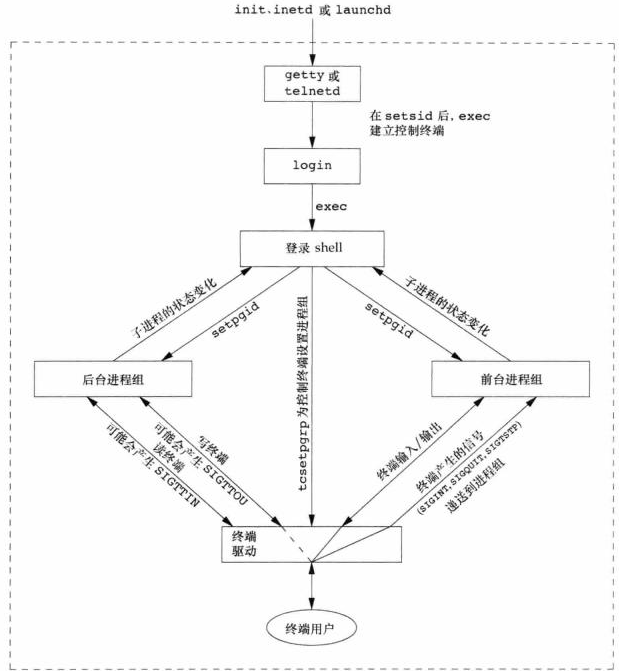
计算机网络 : 应用层自定义协议与序列化
计算机网络 : 应用层自定义协议与序列化 目录 计算机网络 : 应用层自定义协议与序列化引言1. 应用层协议1.1 再谈协议1.2 网络版计算器1.3 序列化与反序列化 2. 重新理解全双工3. socket和协议的封装4. 关于流失数据的处理5. Jsoncpp5.1 特性5.2 安装5.3…...
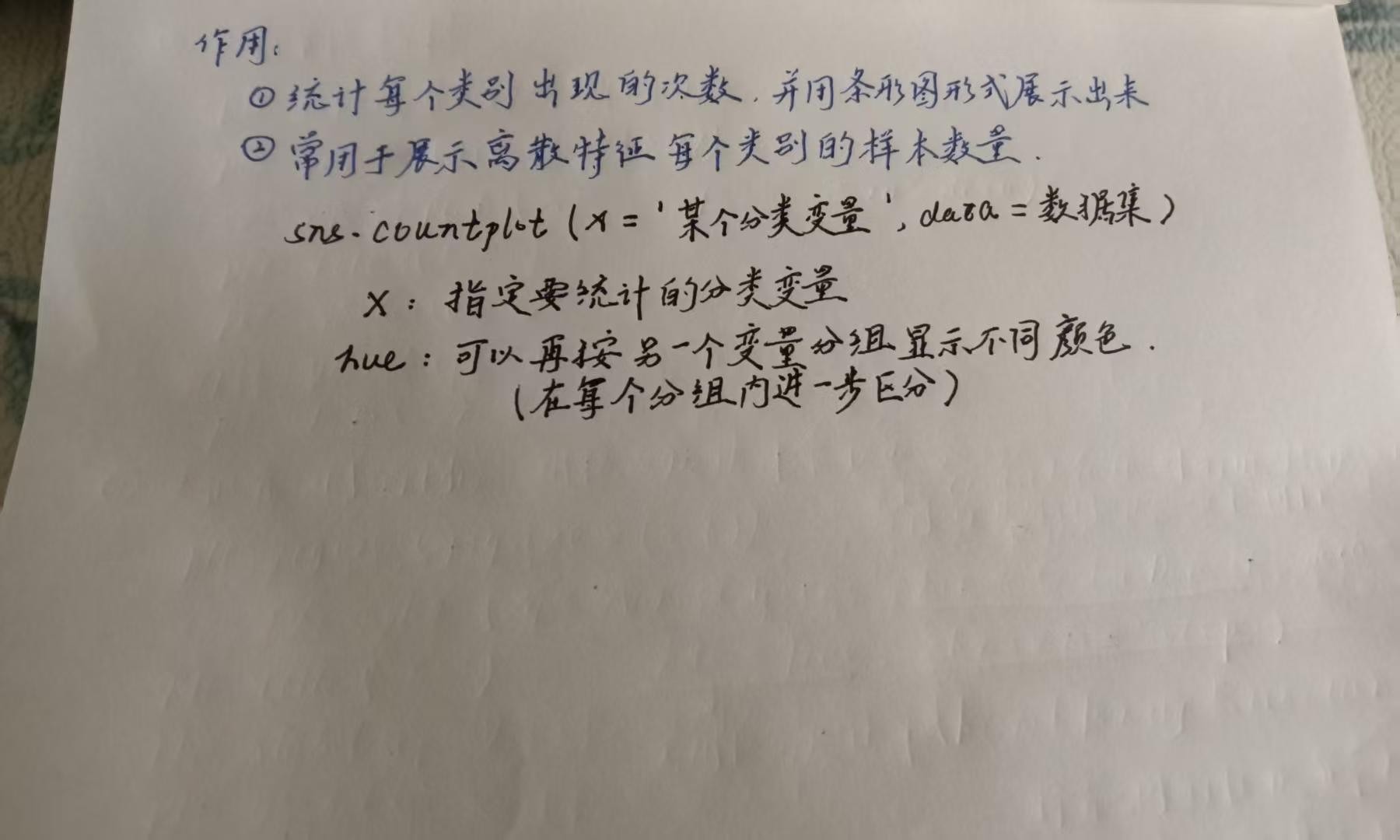
Python Day42 学习(日志Day9复习)
补充:关于“箱线图”的阅读 以下图为例 浙大疏锦行 箱线图的基本组成 箱体(Box):中间的矩形,表示数据的中间50%(从下四分位数Q1到上四分位数Q3)。中位线(Median)&#…...
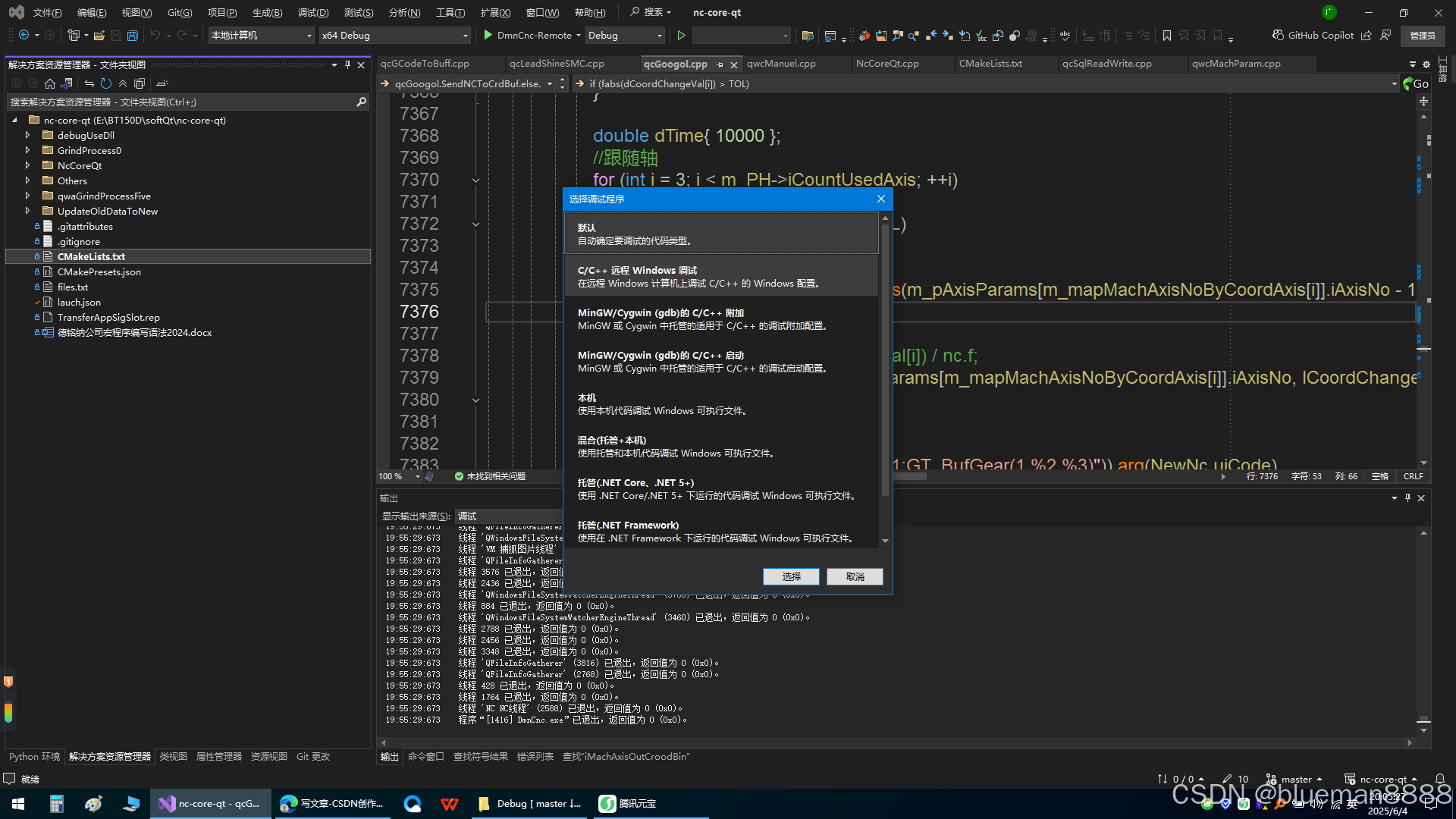
CMake在VS中使用远程调试
选中CMakeLists.txt, 右键-添加调试配置-选中"C\C远程windows调试" 之后将 aunch.vs.json文件改为如下所示: CMake在VS中使用远程调试时,Launch.vs.json中远程调试设置 ,远程电脑开启VS专用的RemoteDebugger {"version": "0.2.1","defaul…...
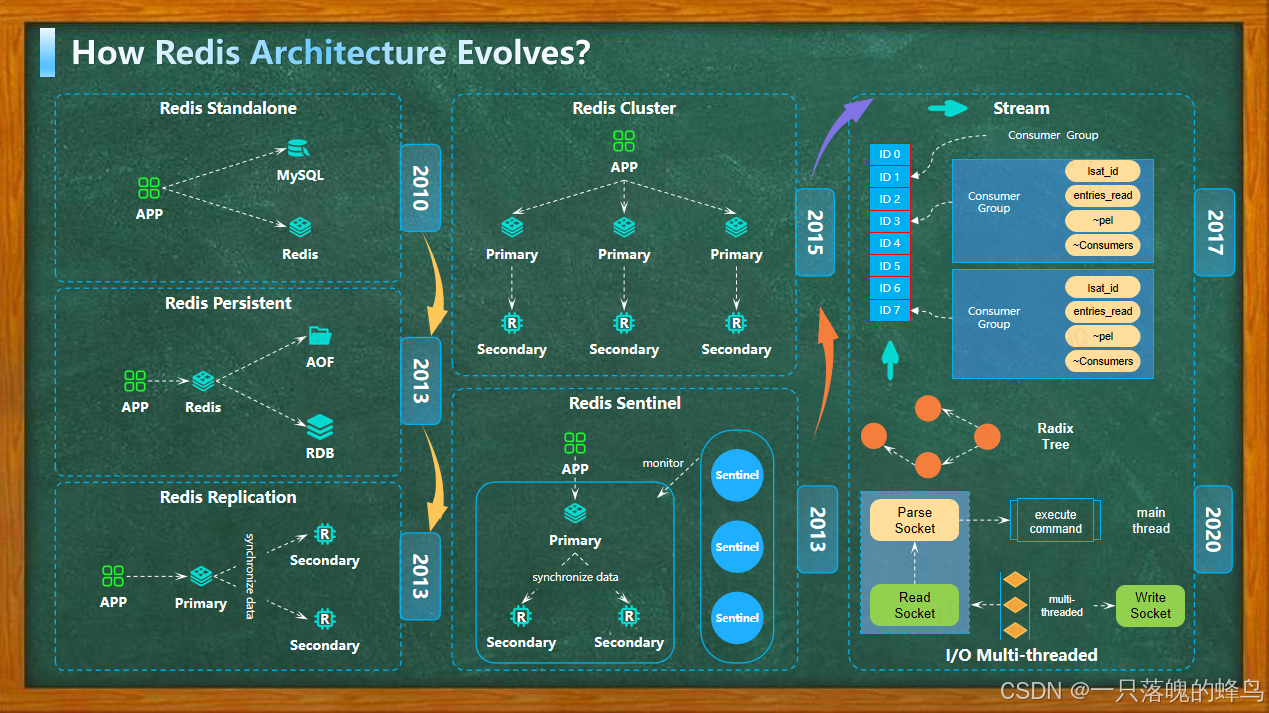
《图解技术体系》How Redis Architecture Evolves?
Redis架构的演进经历了多个关键阶段,从最初的内存数据库发展为支持分布式、多模型和持久化的高性能系统。以下为具体演进路径: 单线程模型与基础数据结构 Redis最初采用单线程架构,利用高效的I/O多路复用(如epoll)处…...

从零搭建到 App Store 上架:跨平台开发者使用 Appuploader与其他工具的实战经验
对于很多独立开发者或小型团队来说,开发一个 iOS 应用并不难,真正的挑战在于最后一步:将应用成功上架到 App Store。尤其是当你主要在 Windows 或 Linux 系统上开发,缺乏苹果设备和 macOS 环境时,上架流程往往变得繁琐…...

Spring Cloud 2025 正式发布啦
文章目录 一、版本兼容性二、Spring Cloud Gateway 重大更新1、新增功能1.1 Function & Stream 处理器集成1.2 Bucket4j 限流器支持 2、重要弃用2.1. WebClientRouting 基础设施2.2. 模块和启动器重命名 3、破坏性变更3.1 X-Forwarded-* 头部默认禁用3.2 配置受信任代理:3.…...

一文速通Python并行计算:12 Python多进程编程-进程池Pool
一文速通 Python 并行计算:12 Python 多进程编程-进程池 Pool 摘要: 在Python多进程编程中,Pool类用于创建进程池,可并行执行多个任务。通过map、apply等方法,将函数和参数分发到子进程,提高CPU利用率&…...

相机Camera日志分析之二十五:高通相机Camx 基于预览1帧的process_capture_request四级日志分析详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:相机Camera日志分析之二十四:高通相机Camx 基于预览1帧的process_capture_request三级日志分析详解 ok 这一篇我们开始讲: 相机Camera日志分析之二十五:高通相机Camx 基于预览1帧的process_capture_…...

React从基础入门到高级实战:React 实战项目 - 项目一:在线待办事项应用
React 实战项目:在线待办事项应用 欢迎来到本 React 开发教程专栏的第 26 篇!在之前的 25 篇文章中,我们从 React 的基础概念逐步深入到高级技巧,涵盖了组件、状态、路由和性能优化等核心知识。这一次,我们将通过一个…...

云部署实战:基于AWS EC2/Aliyun ECS与GitHub Actions的CI/CD全流程指南
在当今快速迭代的软件开发环境中,云部署与持续集成/持续交付(CI/CD)已成为现代开发团队的标配。本文将详细介绍如何利用AWS EC2或阿里云ECS结合GitHub Actions构建高效的CI/CD流水线,从零开始实现自动化部署的全过程。 最近挖到一个宝藏级人工智能学习网…...

golang 如何定义一种能够与自身类型值进行比较的Interface
定义一种具有比较能力的类型是一种常见需求,比如对一组相同类型的值进行排序,就需要进行两两比较,那么在Go语言中有没有办法定义一种具有比较能力的Interface,实现该接口的类型都具备比较能力呢,最常见最容易的办法是定…...
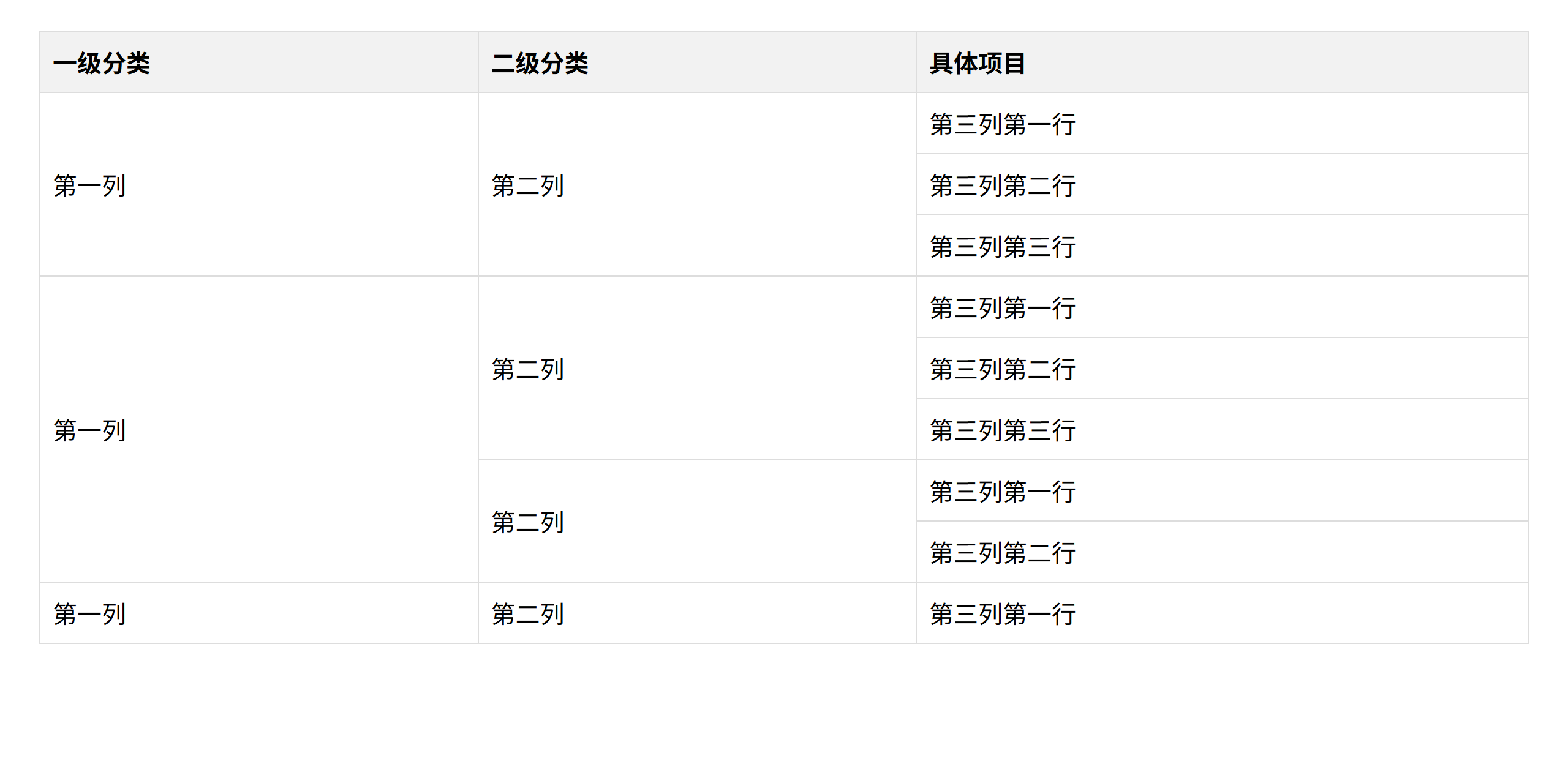
Web前端之原生表格动态复杂合并行、Vue
MENU 效果公共数据纯原生StyleJavaScript vue原生table 效果 原生的JavaScript原生table null 公共数据 const list [{id: "a1",title: "第一列",list: [{id: "a11",parentId: "a1",title: "第二列",list: [{ id: "…...

『uniapp』把接口的内容下载为txt本地保存 / 读取本地保存的txt文件内容(详细图文注释)
目录 预览效果思路分析downloadTxt 方法readTxt 方法 完整代码总结 欢迎关注 『uniapp』 专栏,持续更新中 欢迎关注 『uniapp』 专栏,持续更新中 预览效果 思路分析 downloadTxt 方法 该方法主要完成两个任务: 下载 txt 文件:通…...
)
C/C++ 面试复习笔记(2)
C语言如何实现快速排序算法? 答案:快排是一种分治算法,选择一个基准元素,将数据划分成两部分,然后递归排序 补充: void quick_sort(int arr[], int start, int end) {//判断是否需要排序if (start > …...

宝马集团推进数字化转型:强化生产物流与财务流程,全面引入SAP现代架构
2025年6月,宝马集团宣布在生产物流与财务流程领域取得重大数字化成果。这些进展标志着集团全球范围内采用基于云的新型SAP架构进入关键阶段,旨在提升运营效率、透明度和AI能力,为未来工业发展奠定技术基础。 一、生产物流全球数字化部署 宝…...

【Redis技术进阶之路】「原理分析系列开篇」分析客户端和服务端网络诵信交互实现(服务端执行命令请求的过程 - 时间事件处理部分)
揭秘高效存储模型与数据结构底层实现 【专栏简介】【技术大纲】【专栏目标】【目标人群】1. Redis爱好者与社区成员2. 后端开发和系统架构师3. 计算机专业的本科生及研究生 时间事件:serverCron函数更新服务器时间缓存更新LRU时钟-lruclock更新服务器每秒执行命令次…...