【方案分享】蓝牙Beacon定位精度优化(包含KF、EKF与UKF卡尔曼滤波算法详解)
蓝牙Beacon定位精度优化:KF、EKF与UKF卡尔曼滤波算法详解
标签:蓝牙定位|Beacon|卡尔曼滤波|UKF|EKF|RSSI|室内定位|滤波算法|精度优化
相关分享:
- 【方案分享】展厅智能讲解:基于BLE蓝牙Beacon的自动讲解触发技术实现
一、引言:为什么蓝牙Beacon定位精度难以保证?
随着物联网与智能空间的发展,蓝牙Beacon定位系统已广泛应用于展馆导航、商场引导、工业仓储等场景中。但现实中我们常常遇到这些问题:
- RSSI(信号强度)波动剧烈,定位不稳定;
- Beacon信号容易受到多路径、遮挡等干扰;
- 基于三边定位法得到的位置误差较大。
为了解决这些问题,滤波算法成为关键手段,而卡尔曼滤波(Kalman Filter)是其中最核心的一种方案。
二、卡尔曼滤波简介:从KF到EKF再到UKF
1. 经典卡尔曼滤波(KF)
卡尔曼滤波是一种线性最优估计算法,适用于系统动态可建模为线性方程,且噪声服从高斯分布的情形。
其基本流程:
- 预测当前状态;
- 计算预测误差协方差;
- 使用观测值更新状态估计。
2. 扩展卡尔曼滤波(EKF)
在实际系统中,状态转移或观测模型往往是非线性的。EKF通过泰勒一阶展开(Jacobian矩阵)将其线性化,从而仍可使用卡尔曼滤波思想处理。
适合轻度非线性系统,算法流程类似KF,只是增加了线性化处理步骤。
3. 无迹卡尔曼滤波(UKF)
UKF是现代滤波理论中的强大工具,其使用“无迹变换”(Unscented Transform)对非线性系统进行处理,不需要对函数进行导数求解,更适合高度非线性或噪声难以建模的系统。
优势:
- 更高精度;
- 适合复杂模型;
- 不依赖Jacobian矩阵。
三、蓝牙Beacon定位中的距离估计模型
在基于RSSI的定位系统中,RSSI与距离的关系是非线性的,常见模型为:
d = 10 ( R S S I 0 − R S S I 10 ⋅ n ) d = 10^{\left(\frac{RSSI_0 - RSSI}{10 \cdot n}\right)} d=10(10⋅nRSSI0−RSSI)
其中:
- d d d:估算距离;
- R S S I RSSI RSSI:接收到的信号强度;
- R S S I 0 RSSI_0 RSSI0:参考点强度(如1米);
- n n n:路径损耗因子,受环境影响变化。
RSSI测距的不确定性
- 波动范围大(可达±5 dBm);
- 环境遮挡严重;
- 多路径效应;
- 无法确保高斯分布假设成立。
因此,不能直接使用KF进行滤波处理,需要考虑非线性特性。
四、基于UKF的蓝牙Beacon滤波定位流程
1. 状态建模
设状态向量为 x = [ x , y , v x , v y ] x = [x, y, v_x, v_y] x=[x,y,vx,vy] 表示位置与速度,测量值为RSSI估算的距离。
系统状态转移为:
x k + 1 = f ( x k ) + w k x_{k+1} = f(x_k) + w_k xk+1=f(xk)+wk
其中 f ( x k ) f(x_k) f(xk) 可建模为匀速运动模型。
2. 测量模型构建
观测函数:
z k = h ( x k ) + v k = ( x − x i ) 2 + ( y − y i ) 2 + v k z_k = h(x_k) + v_k = \sqrt{(x - x_i)^2 + (y - y_i)^2} + v_k zk=h(xk)+vk=(x−xi)2+(y−yi)2+vk
其中 ( x i , y i ) (x_i, y_i) (xi,yi) 为第 i 个 Beacon 位置,测量值为 RSSI 估算出的距离。
3. 无迹卡尔曼滤波步骤
- 生成Sigma点;
- 进行非线性传播(状态与观测函数);
- 预测协方差与均值;
- 计算Kalman增益与状态更新。
可使用滤波库如:
- Python:
filterpy/pykalman; - C++:Eigen + UKF 自实现;
- Unity/Android:C#/Java实现UKF核心步骤。
五、如何进一步提升Beacon定位精度?
1. 多源融合
- 加入加速度计、陀螺仪(IMU)数据 → 融合滤波(如UKF + PF);
- 使用UWB或WiFi RSSI做辅助校正;
- 利用地图约束与粒子滤波增强定位。
2. 动态自适应参数调整
- 根据信号波动自动调节协方差矩阵 Q , R Q, R Q,R;
- 结合机器学习预测信道状态;
- 建立路径损耗动态模型。
总结
在蓝牙Beacon定位场景下,由于RSSI与距离之间的非线性、高波动特性,传统KF已难以胜任精度要求。EKF适合轻度非线性,UKF则在复杂室内环境中具备最优性能表现。
尽管如此,若您有实际项目需求,建议优先选用:
- 商用信标厂商SDK
- 结合IMU/UWB等多源融合方案
- 针对特定环境优化的粒子滤波或深度学习方法
关于本文使用卡尔曼滤波(KF)进行蓝牙Beacon定位的说明
⚠️ 重要说明:本文基于作者个人学习与研究目的,对卡尔曼滤波(KF、EKF、UKF)在蓝牙Beacon定位中的应用进行分析。请读者注意以下几点:
-
实际定位效果说明:蓝牙Beacon定位系统精度受多种因素影响,如RSSI信号波动、多路径效应、墙体/人体遮挡等物理干扰,在不同环境中表现差异显著。本文所使用的滤波器(包括KF、EKF、UKF)仅在特定实验场景中测试验证,并未显著超越现有如AltBeacon开源库以及市面上部分信标厂商提供的商用SDK精度表现。
-
延迟问题:KF类滤波算法虽然具备一定的平滑能力,但其对连续观测的依赖导致了系统在快速移动或突变场景下响应延迟较为明显,存在“跟不上”的情况。这种延迟在需要实时响应的导航类应用中尤为明显。
-
学习目的为主:因此,本文主要作为“卡尔曼滤波在Beacon定位”的学习资料,内容更注重滤波器设计原理、算法适用性对比及滤波效果分析,不代表推荐用于实际产品部署。
相关文章:
【方案分享】蓝牙Beacon定位精度优化(包含KF、EKF与UKF卡尔曼滤波算法详解)
蓝牙Beacon定位精度优化:KF、EKF与UKF卡尔曼滤波算法详解 标签:蓝牙定位|Beacon|卡尔曼滤波|UKF|EKF|RSSI|室内定位|滤波算法|精度优化 相关分享:…...

新能源汽车热管理核心技术解析:冬季续航提升40%的行业方案
新能源汽车热管理核心技术解析:冬季续航提升40%的行业方案 摘要:突破续航焦虑的关键在热能循环! 👉 本文耗时72小时梳理行业前沿方案,含特斯拉/比亚迪等8家车企热管理系统原理图 一、热管理为何成新能源车决胜关键&am…...
)
LeetCode 239. 滑动窗口最大值(单调队列)
题目传送门:239. 滑动窗口最大值 - 力扣(LeetCode) 题意就是求每个窗口内的最大值,返回一个最大值的数组,滑动窗口的最值问题。 做法:维护一个单调递减队列,队头为当前窗口的最大值。 设计的…...
华为云Flexus+DeepSeek征文|DeepSeek-V3/R1开通指南及使用心得
🏆作者简介,黑夜开发者,CSDN领军人物,全栈领域优质创作者✌,CSDN博客专家,阿里云社区专家博主,2023年CSDN全站排名top 28。 🏆数年电商行业从业经验,AWS/阿里云资深使用用…...
)
鸿蒙图片缓存(一)
移动端开发过程中图片缓存功能是必备,iOS和安卓都有相关工具库,鸿蒙系统组件本身也自带缓存功能,但是遇到复杂得逻辑功能还是需要封装图片缓存工具。 系统组件Image 1. Image的缓存策略 Image模块提供了三级Cache机制,解码后内…...
运行示例程序和一些基本操作
欢迎 ----> 示例 --> 选择sample CTRL B 编译代码 CTRL R 运行exe 项目 中 Shadow build 表示是否 编译生成文件和 源码是否放一块 勾上不在同一个地方 已有项目情况下怎么打开项目 方法一: 左键双击 xxx.pro 方法二: 文件菜单里面 选择打开项目...

学习数字孪生,为你的职业发展开辟新赛道
你有没有想过,未来十年哪些技能最吃香? AI、大数据、智能制造、元宇宙……这些词频繁出现在招聘市场和行业报告中。而在它们背后,隐藏着一个“看不见但无处不在”的关键技术——数字孪生(Digital Twin)。 它不仅在制造…...
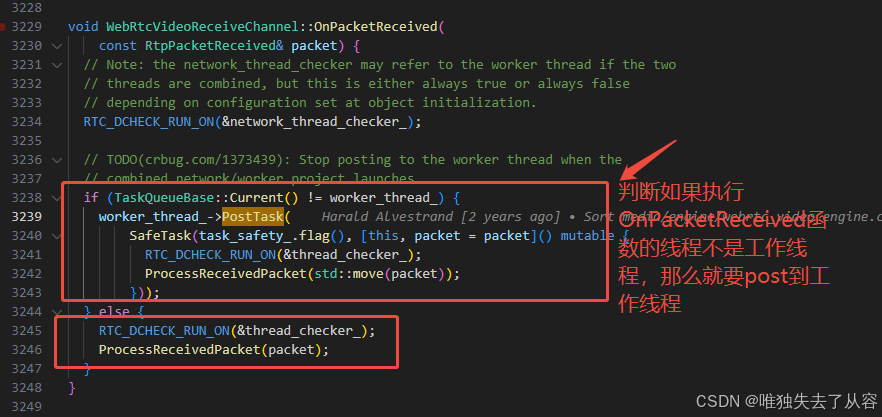
WebRTC源码线程-1
1、概述 本篇主要是简单介绍WebRTC中的线程,WebRTC源码对线程做了很多的封装。 1.1 WebRTC中线程的种类 1.1.1 信令线程 用于与应用层的交互,比如创建offer,answer,candidate等绝大多数的操作 1.1.2 工作线程 负责内部的处理逻辑&…...

python学习打卡day47
DAY 47 注意力热图可视化 昨天代码中注意力热图的部分顺移至今天 知识点回顾: 热力图 作业:对比不同卷积层热图可视化的结果 # 可视化空间注意力热力图(显示模型关注的图像区域) def visualize_attention_map(model, test_loader,…...
MySQL中的内置函数
文章目录 一、日期函数1.1 获取当前的日期1.2 获取当前时间1.3 获取当前日期和时间1.4 提取时间日期1.5 添加日期1.6 减少日期1.7 两个日期的差值 二、字符串处理函数2.1 获取字符串的长度2.2 获取字符串的字节数2.3 字符串拼接2.4 转小写2.5 转大写2.6 子字符串第⼀次出现的索…...

Ansible自动化运维全解析:从设计哲学到实战演进
一、Ansible的设计哲学:简单即正义 在DevOps工具链中,Ansible以其"无代理架构(Agentless)"设计独树一帜。这个用Python编写的自动化引擎,通过SSH协议与目标主机通信,彻底摒弃了传统配置管理工具…...

YOLOv8n行人检测实战:从数据集准备到模型训练
YOLOv8n行人检测实战:从数据集准备到模型训练 一、为什么选择YOLOv8?二、环境准备2.1 环境配置解析 三、安装Ultralytics框架四、数据集准备与理解4.1 数据集下载4.2 数据集结构4.3 YOLO标签格式解析 五、数据集可视化:理解标注数据5.1 可视化…...
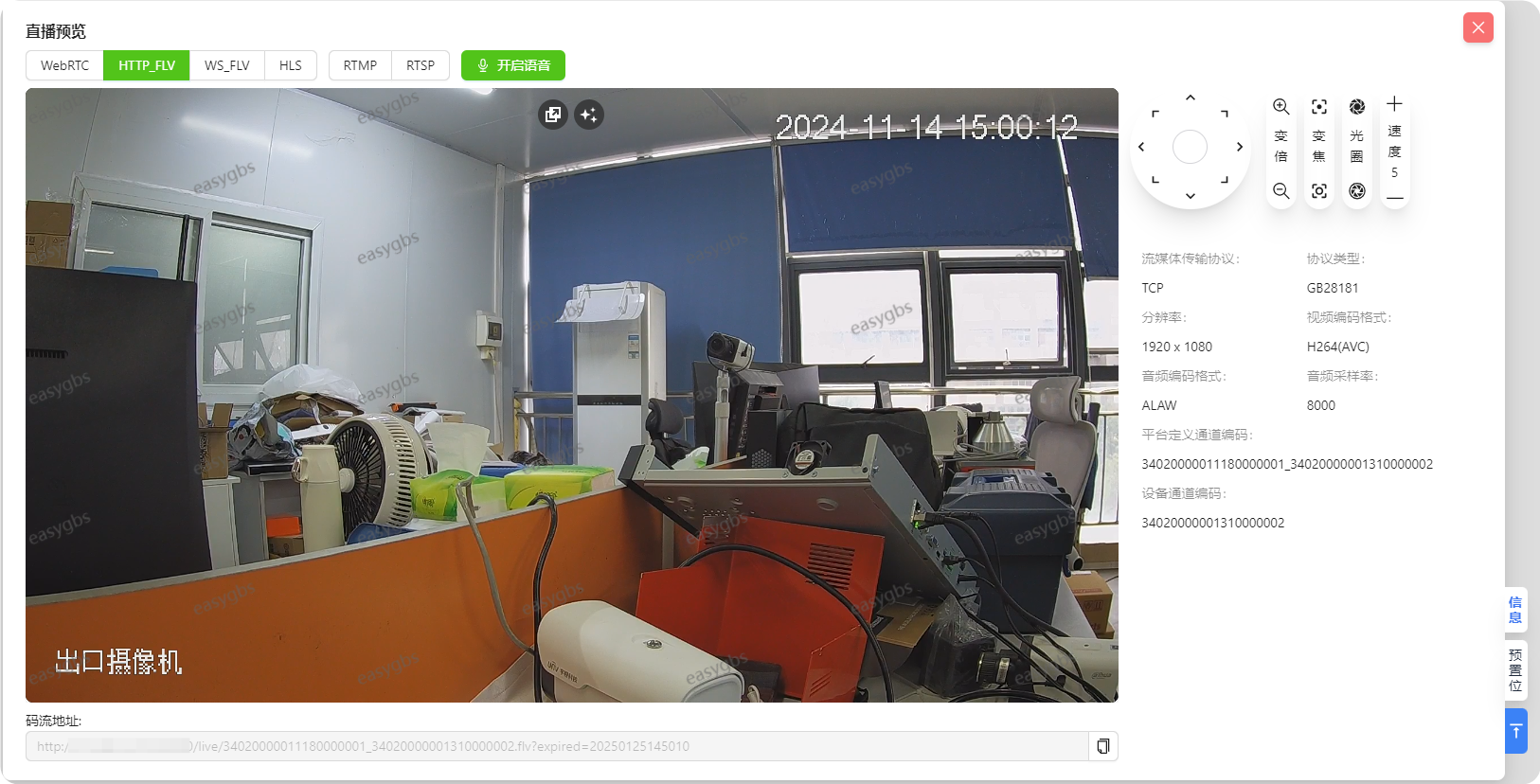
国标GB28181设备管理软件EasyGBS远程视频监控方案助力高效安全运营
一、方案背景 在商业快速扩张的背景下,连锁店门店数量激增,分布范围广。但传统人工巡检、电话汇报等管理方式效率低下,存在信息滞后、管理盲区,难以掌握店铺运营情况,影响企业效率与安全。网络远程视频监控系统可有…...
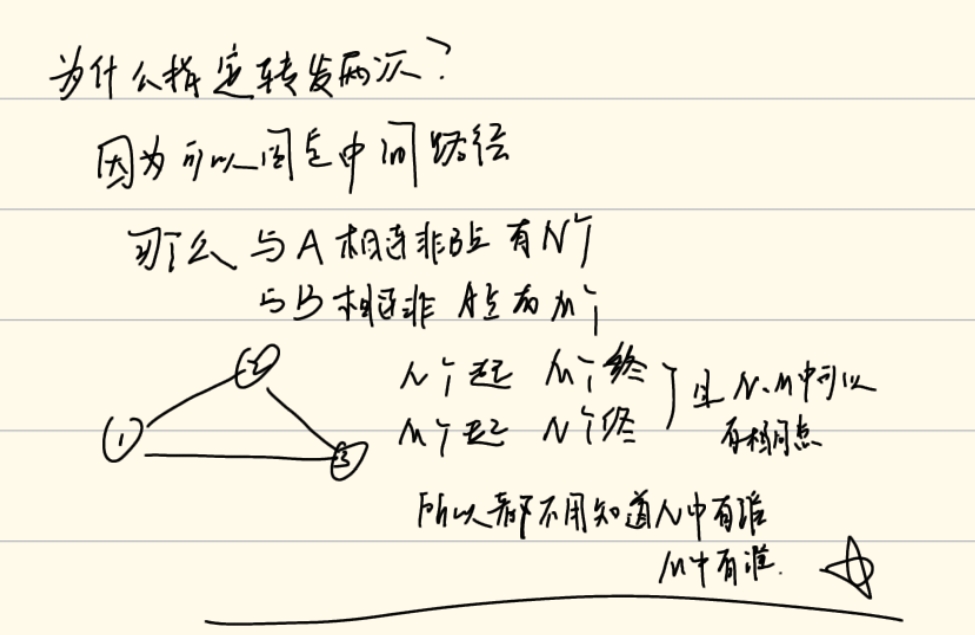
网络寻路--图论
所以我们固定题中M条边(因为这M条一定联通) P8605 [蓝桥杯 2013 国 AC] 网络寻路 - 洛谷 #include<bits/stdc.h> using namespace std; #define N 100011 typedef long long ll; typedef pair<int,int> pii; int n,m; int d[N],u[N],v[N]…...
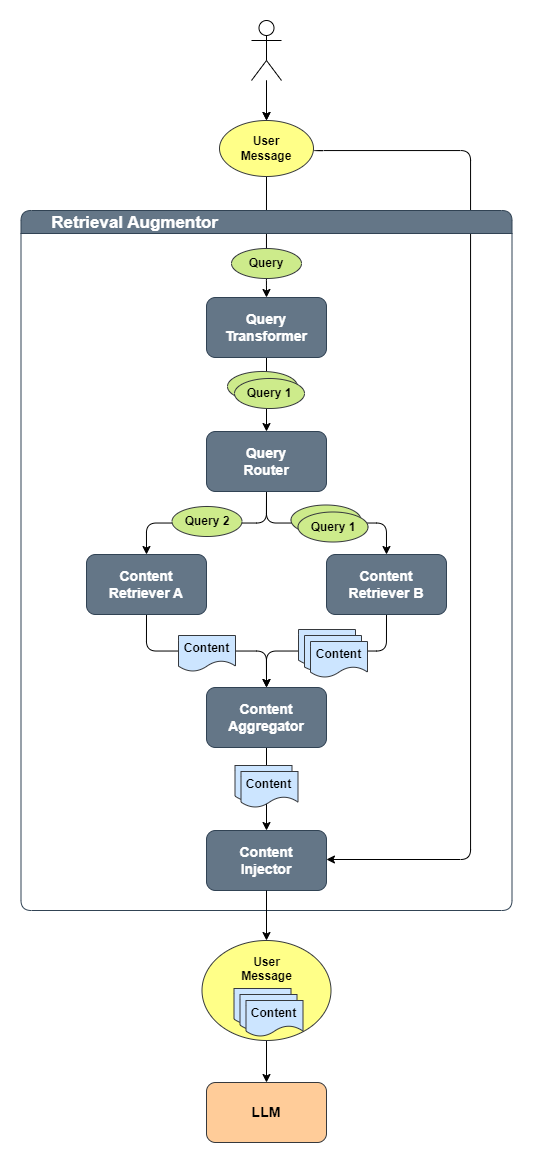
LangChain4j 学习教程项目
LangChain4j 学习教程 项目地址项目简介主要功能使用的技术和库项目环境配置环境要求 依赖版本每天学习内容和目标Day 01Day 02Day 03Day 04Day 05Day 06Day 07Day 08Day 09Day 10Day 11Day 12重点学习内容 RAG 经过为期12天(日均1小时)的LangChain4j源码…...

【Go语言基础【15】】数组:固定长度的连续存储结构
文章目录 零、概述一、数组基础1、数组的本质:固定长度的连续存储结构2、声明与初始化3、访问与修改元素 二、数组拷贝与传参1、 值拷贝特性2、指针数组的拷贝3、函数传参(值传递) 三、数组遍历四、多维数组五、数组与切片的区别 零、概述 数…...

【读论文】U-Net: Convolutional Networks for Biomedical Image Segmentation 卷积神经网络
摘要1 Introduction2 Network Architecture3 Training3.1 Data Augmentation 4 Experiments5 Conclusion背景知识卷积激活函数池化上采样、上池化、反卷积softmax 归一化函数交叉熵损失 Olaf Ronneberger, Philipp Fischer, Thomas Brox Paper:https://arxiv.org/ab…...

Komiko 视频到视频功能炸裂上线!
Komiko 平台作为行业的创新先锋,近日宣布推出全新的视频到视频(Video-to-Video)功能,这一举措犹如一颗重磅炸弹,瞬间在漫画、动画和插画创作的世界里掀起了惊涛骇浪,进一步巩固了其作为 AI 驱动的一体化创作…...
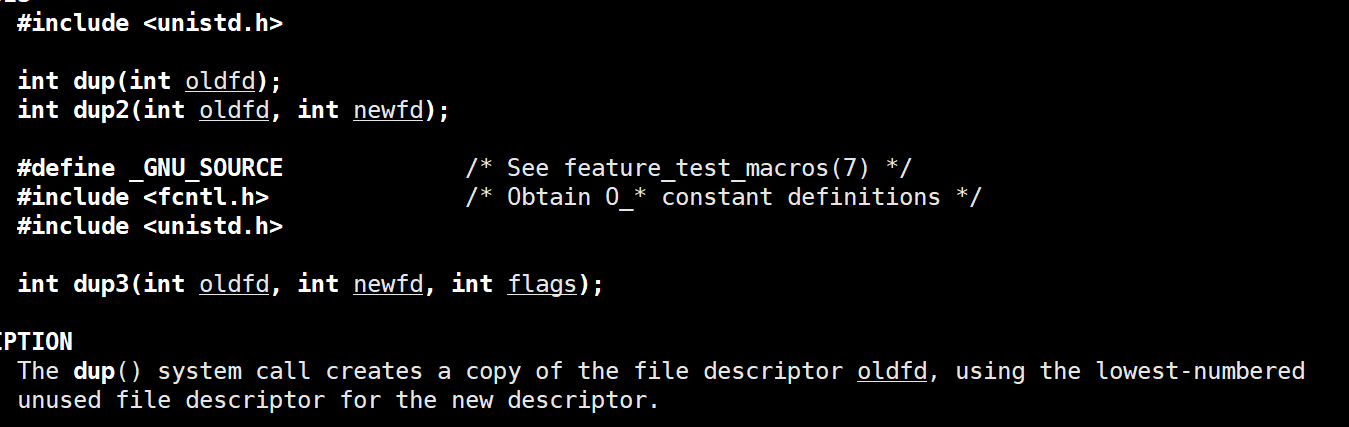
Linux 文件系统与 I/O 编程核心原理及实践笔记
文章目录 一、理解文件1.1 狭义理解1.2 广义理解1.3 文件操作的归类认识1.4 系统角度:进程与文件的交互1.5 实践示例 二、回顾 C 文件接口2.1 hello.c 打开文件2.2 hello.c 写文件2.3 hello.c 读文件2.4 输出信息到显示器的几种方法2.5 stdin & stdout & st…...
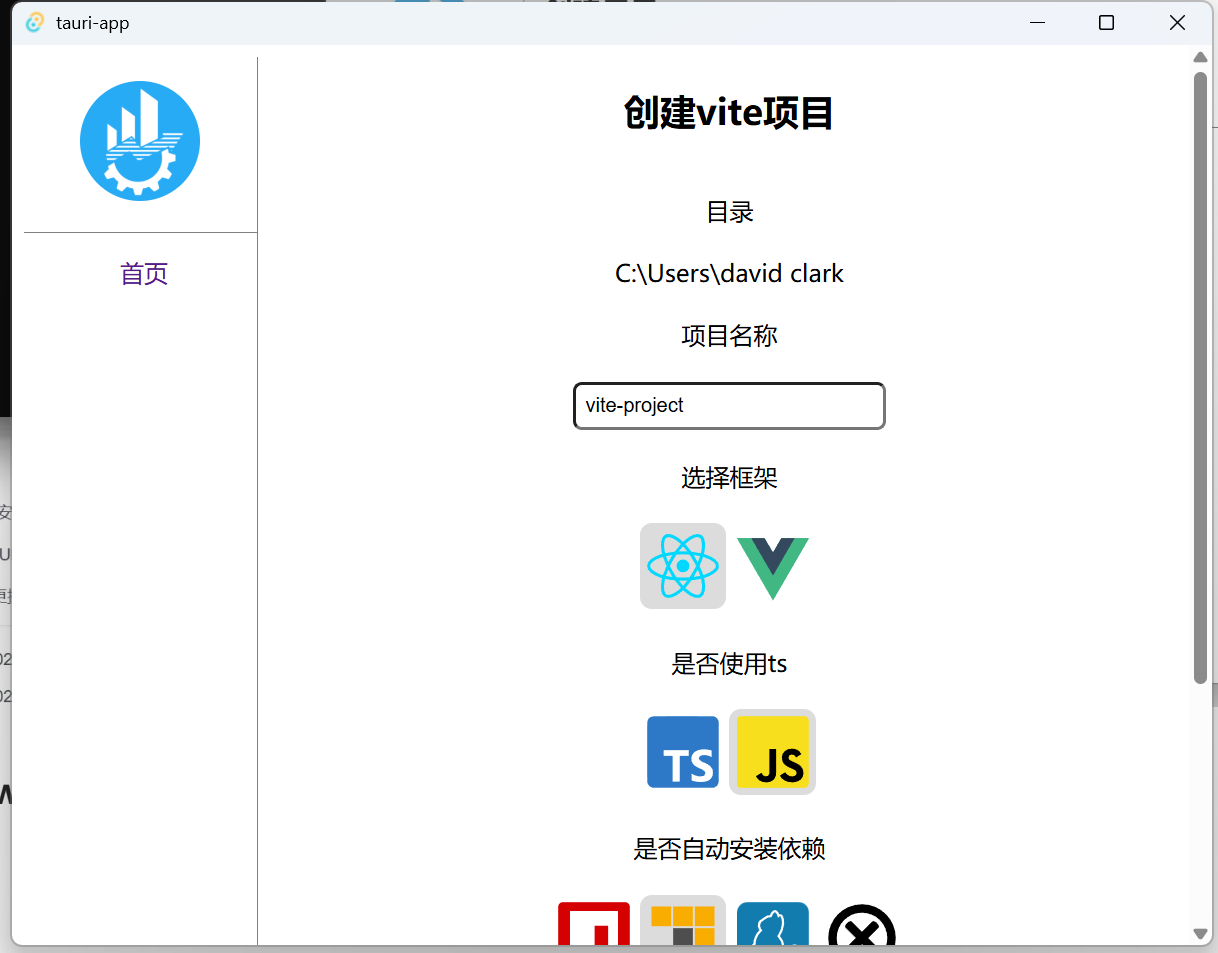
vite+tailwind封装组件库
前言 演示视频 https://www.bilibili.com/video/BV1EST3zPEyP/?spm_id_from333.1387.homepage.video_card.click 参考 https://juejin.cn/post/7112295067682865166 https://juejin.cn/post/7046187185615142949 代码仓库 https://gitee.com/malguy/vite-components-li…...

Gin框架实战指南:从入门到进阶
Gin框架实战指南:从入门到进阶 在当今的后端开发领域,Gin框架以其高性能、简洁易用的特点,赢得了众多Go语言开发者的青睐。本文将带你深入探索Gin框架的方方面面,从基础的安装与使用,到响应处理、请求参数解析、中间件…...

【Java学习笔记】包装类
包装类(Wrapper) 1. 介绍 (1)针对八种基本数据类型相应的引用类型 --> 包装类 (2)有了类的特点,就可以调用类中的方法 2. 分类和继承关系 基本数据类型包装类父类booleanBooleanObjectc…...

【高效开发工具系列】Blackmagic Disk Speed Test for Mac:专业硬盘测速工具
博客目录 一、Blackmagic Disk Speed Test 概述二、软件核心功能解析三、v3.3 版本的新特性与改进四、实际应用场景分析五、使用技巧与最佳实践六、与其他工具的比较及优势 一、Blackmagic Disk Speed Test 概述 Blackmagic Disk Speed Test 是 Mac 平台上广受专业人士青睐的一…...

QtDBus模块功能及架构解析
Qt 6.0 中的 QtDBus 模块是一个用于进程间通信(IPC)的核心模块,它基于 D-Bus 协议实现。D-Bus 是一种在 Linux 和其他类 Unix 系统上广泛使用的消息总线系统,允许应用程序和服务相互通信。 一、QtDBus模块主要功能: 1…...
理论概述与实践教程)
光学字符识别(OCR)理论概述与实践教程
一、 光学字符识别(OCR)理论基础 OCR,即Optical Character Recognition,旨在通过计算机视觉和模式识别技术,将图像中包含的文本信息转换为机器可编辑、可搜索的文本数据。这项技术是实现信息数字化、自动化处理纸质或图像化文档的关键。 1. OCR处理管线 OCR系统通常采用…...

关键字--sizeof
sizeof 是 C 中的一个编译时运算符,用于获取一个类型或对象在内存中所占的字节数(单位:字节,byte)。 用法 获取类型的大小: std::cout << sizeof(int) << std::endl; // 输出int类型的字节数…...

Ubuntu20.04启动python的虚拟环境
如果你使用 mkvirtualenv 来创建虚拟环境,说明你已经安装了 virtualenvwrapper,这是一个用于管理 Python 虚拟环境的工具。 激活虚拟环境 要激活你使用 mkvirtualenv 创建的虚拟环境,按照以下步骤操作: 1.确保已经安装了 virtu…...
)
网页在线客服系统自动欢迎语实现方案(PHP+MySQL)
一、实现思路 在网页在线客服系统中实现自动欢迎语,主要需要以下几个步骤: 在数据库中存储欢迎语内容判断用户是否为首次访问或新会话在适当时机自动发送欢迎消息 演示网站:gofly.v1kf.com 二、数据库设计 首先需要扩展数据库结构:…...
UniRig:如何在矩池云一站式解决 3D 模型绑定难题
在 3D 动画制作中,绑定(Rigging)是一个至关重要但复杂耗时的步骤。它包括为 3D 模型创建骨架并分配蒙皮权重,以实现流畅的动画效果。由清华大学与 Tripo 联合开发的 UniRig 框架,为这一难题提供了全新的解决方案。 什…...
)
用函数实现模块化程序设计(适合考研、专升本)
函数 定义:本质上是一段可以被连续调用、功能相对独立的程序段 c语言是通过“函数”实现模块化的。根据分类标准不同函数分为以下几类。 用户角度:库函数、自定义函数 函数形式:有参函数、无参函数 作用域:外部函数、内部函数 …...