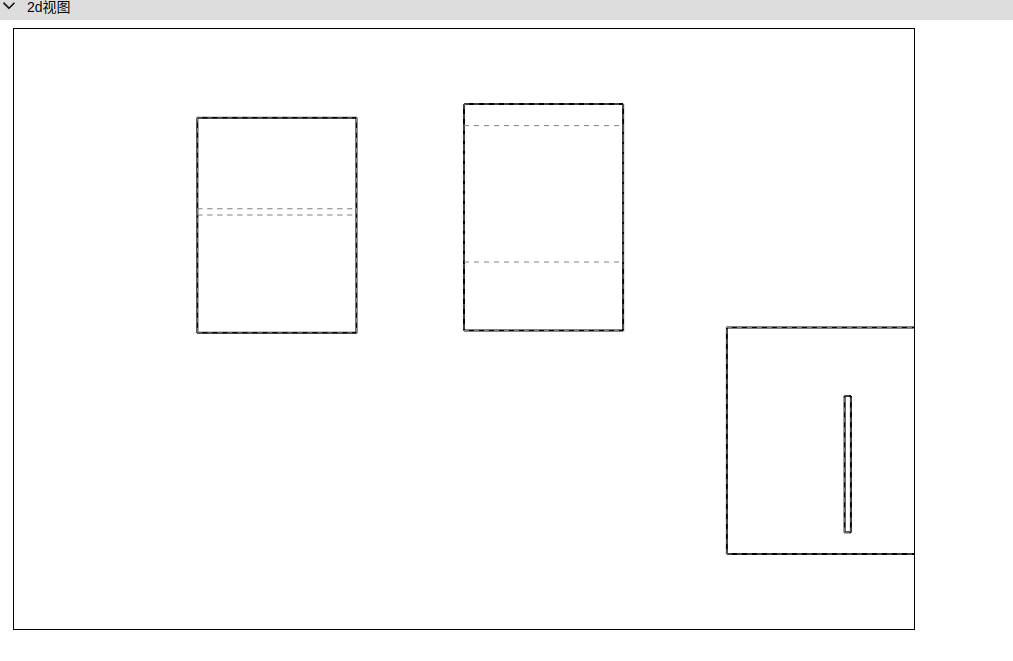
chili3d 笔记17 c++ 编译hlr 带隐藏线工程图

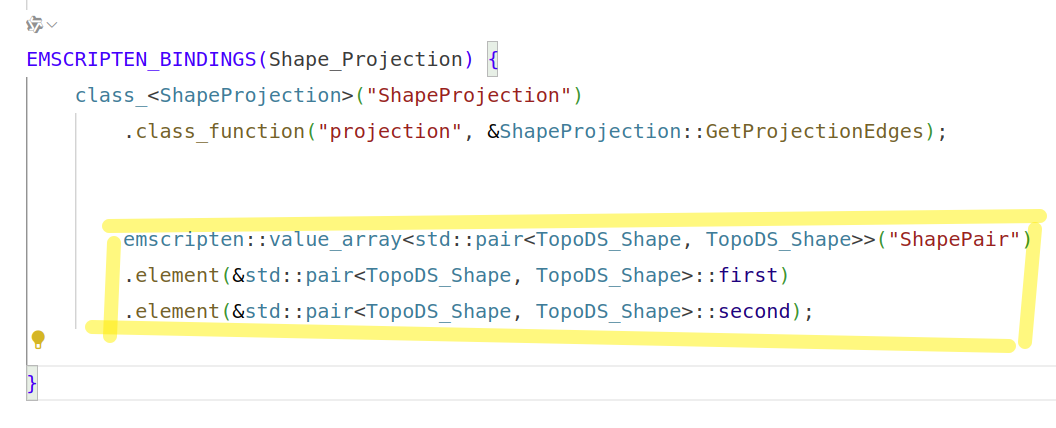
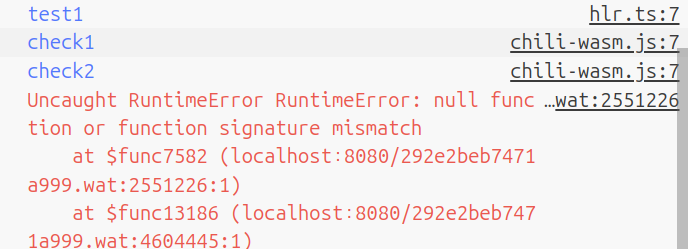
这个要注册不然emscripten编译不起来
---------------
行不通
![]()
![]()
----------------

结构体
using LineSegment = std::pair<gp_Pnt, gp_Pnt>;using LineSegmentList = std::vector<LineSegment>;
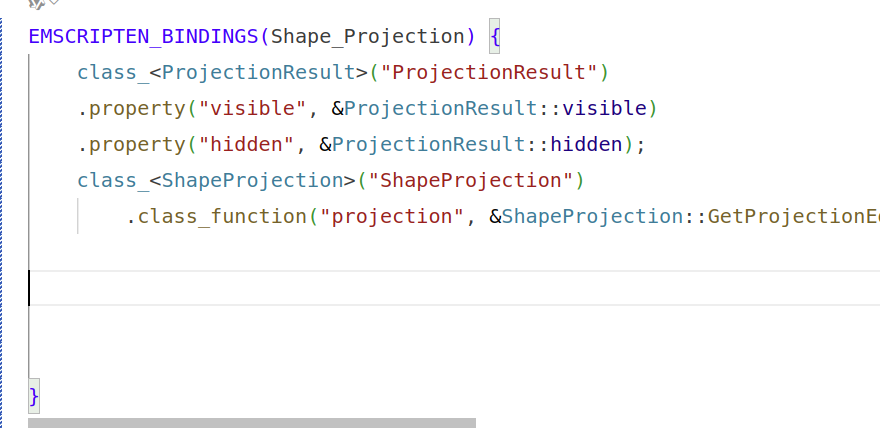
EMSCRIPTEN_BINDINGS(Shape_Projection) {value_object<LineSegment>("LineSegment").field("first", &LineSegment::first).field("second", &LineSegment::second);// 绑定 LineSegmentList (std::vector<LineSegment>)register_vector<LineSegment>("LineSegmentList");class_<ProjectionResult>("ProjectionResult").property("visible", &ProjectionResult::visible).property("hidden", &ProjectionResult::hidden);class_<ShapeProjection>("ShapeProjection").class_function("projection", &ShapeProjection::GetProjectionEdges);}

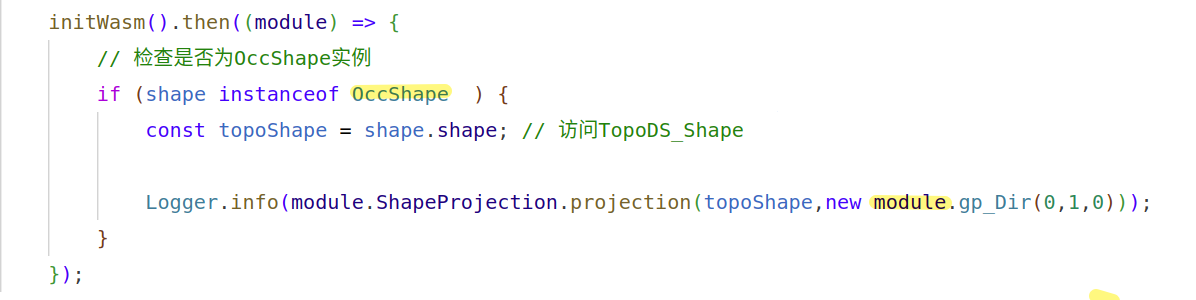
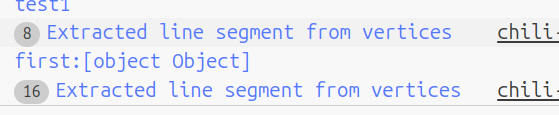
printf无效,要用cout
deepwiki写occ代码真的强
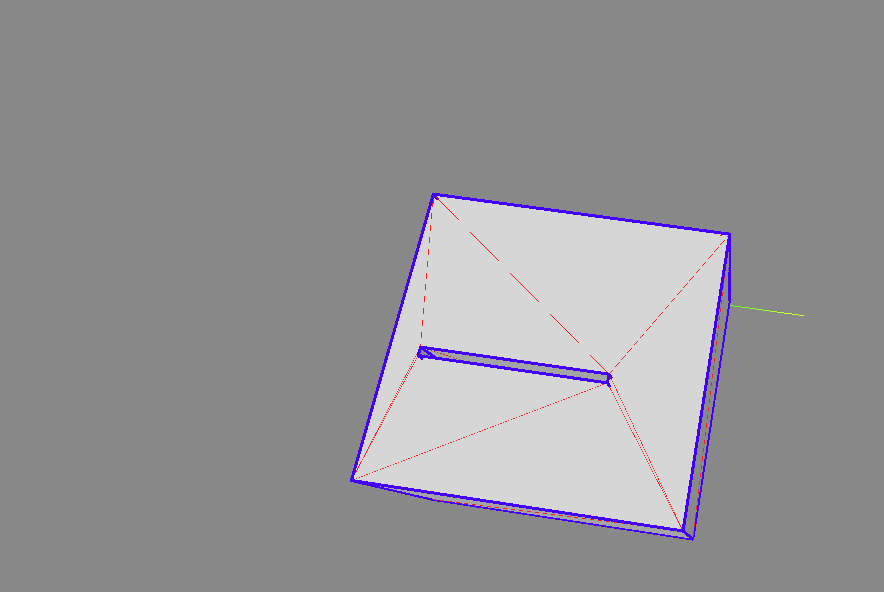
视图偏移还有点问题
import { IApplication, Logger, PubSub, ShapeNode } from "chili-core";
import { getProjectionEdges, gp_Pnt, LineSegmentList, OccShape, ProjectionResult2 } from "chili-wasm";interface Segment {first: gp_Pnt;second: gp_Pnt;
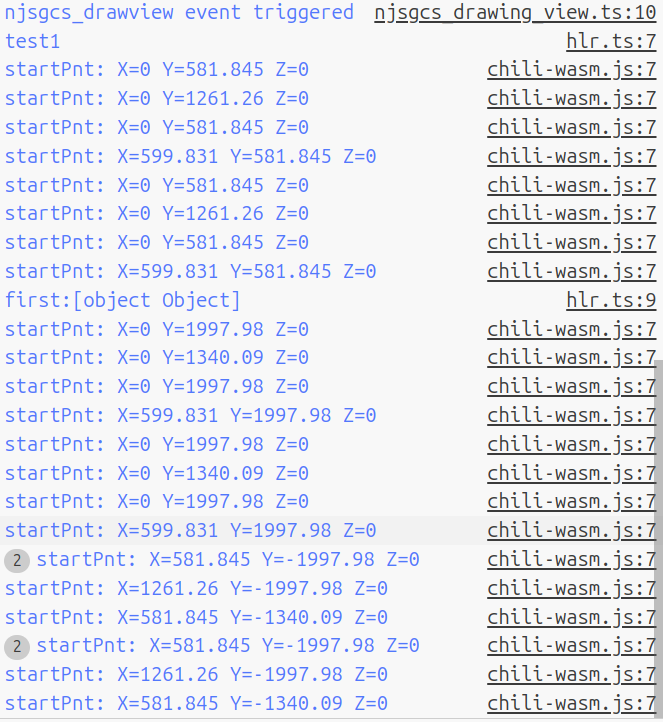
}export class njsgcs_drawingView extends HTMLElement {private viewportCanvas2d: HTMLCanvasElement | null = null;private app: IApplication | null = null;constructor() {super();PubSub.default.sub("njsgcs_drawview", async (app: IApplication) => {Logger.info("njsgcs_drawview event triggered");if (this.viewportCanvas2d) {this.removeChild(this.viewportCanvas2d);this.viewportCanvas2d = null;}this.app = app;const canvas = this.createCanvas();this.appendChild(canvas);});}private drawProjectionEdges(ctx: CanvasRenderingContext2D, projection: ProjectionResult2) {// 清除画布ctx.clearRect(0, 0, ctx.canvas.width, ctx.canvas.height);// 获取所有线段并合并用于自动缩放计算const allSegments = [...this.toArray(projection.f_visible),...this.toArray(projection.f_hidden),...this.toArray(projection.s_visible),...this.toArray(projection.s_hidden),...this.toArray(projection.t_visible),...this.toArray(projection.t_hidden),];// 自动计算缩放和偏移const { minX, maxX, minY, maxY } = this.calculateBounds(allSegments);const margin = 50;const availableWidth = ctx.canvas.width - 2 * margin;const availableHeight = ctx.canvas.height - 2 * margin;const scaleX = availableWidth / (maxX - minX || 1);const scaleY = availableHeight / (maxY - minY || 1);const scale = Math.min(scaleX, scaleY) * 0.9; // 留点边距const offsetX = ctx.canvas.width / 2;const offsetY = ctx.canvas.height / 2;// 定义各视图偏移const views = [{name: 'front',segmentsVisible: this.toArray(projection.f_visible),segmentsHidden: this.toArray(projection.f_hidden),offset: { x: -availableWidth / 3, y: 0 },},{name: 'side',segmentsVisible: this.toArray(projection.s_visible),segmentsHidden: this.toArray(projection.s_hidden),offset: { x: 0, y: 0 },},{name: 'top',segmentsVisible: this.toArray(projection.t_visible),segmentsHidden: this.toArray(projection.t_hidden),offset: { x: availableWidth / 3, y: 0 },},];// 绘制每个视图for (const view of views) {// 实线:可见线this.drawSegments(ctx,view.segmentsVisible,false,scale,offsetX + view.offset.x,offsetY + view.offset.y);// 虚线:隐藏线this.drawSegments(ctx,view.segmentsHidden,true,scale,offsetX + view.offset.x,offsetY + view.offset.y);}} private calculateBounds(segments: Segment[]) {let minX = Infinity;let maxX = -Infinity;let minY = Infinity;let maxY = -Infinity;for (const segment of segments) {if (segment && segment.first && segment.second) {const points = [segment.first, segment.second];for (const p of points) {minX = Math.min(minX, p.x);maxX = Math.max(maxX, p.x);minY = Math.min(minY, p.y);maxY = Math.max(maxY, p.y);}}}return {minX: minX === Infinity ? 0 : minX,maxX: maxX === -Infinity ? 0 : maxX,minY: minY === Infinity ? 0 : minY,maxY: maxY === -Infinity ? 0 : maxY,};}private drawSegments(ctx: CanvasRenderingContext2D,segments: Segment[],isHidden: boolean,scale: number,offsetX: number,offsetY: number) {ctx.strokeStyle = isHidden ? "gray" : "black";ctx.lineWidth = isHidden ? 1 : 2;ctx.setLineDash(isHidden ? [5, 5] : []);for (const segment of segments) {if (segment && segment.first && segment.second) {ctx.beginPath();ctx.moveTo(segment.first.x * scale + offsetX,-segment.first.y * scale + offsetY);ctx.lineTo(segment.second.x * scale + offsetX,-segment.second.y * scale + offsetY);ctx.stroke();}}}private toArray(segmentList: LineSegmentList): Segment[] {const result = [];for (let i = 0; i < segmentList.size(); i++) {const segment = segmentList.get(i);if (segment) {result.push(segment);}}return result;}private createCanvas(): HTMLCanvasElement {if (!this.viewportCanvas2d) {this.viewportCanvas2d = document.createElement("canvas");this.viewportCanvas2d.width = 900;this.viewportCanvas2d.height = 600;this.viewportCanvas2d.style.border = "1px solid #000";const ctx = this.viewportCanvas2d.getContext("2d");if (ctx) {const document = this.app!.activeView?.document;if (!document) return this.viewportCanvas2d;const geometries = document.selection.getSelectedNodes();const entities = geometries.filter((x) => x instanceof ShapeNode);for (const entity of entities) {const shapeResult = entity.shape;if (shapeResult.isOk) {const shape = shapeResult.value; // 获取IShape // 检查是否为OccShape实例 if (shape instanceof OccShape) {const topoShape = shape.shape; // 访问TopoDS_Shape const ProjectionEdges=getProjectionEdges(topoShape);this.drawProjectionEdges(ctx,ProjectionEdges)}}}}}return this.viewportCanvas2d!;}}customElements.define("njsgcs-drawing-view", njsgcs_drawingView);
import { LineSegmentList, TopoDS_Shape } from "../lib/chili-wasm";
export { LineSegmentList, ProjectionResult2 };
interface ProjectionResult2 {f_visible:LineSegmentList ,f_hidden: LineSegmentList ,s_visible: LineSegmentList ,s_hidden: LineSegmentList ,t_visible: LineSegmentList ,t_hidden:LineSegmentList ,}
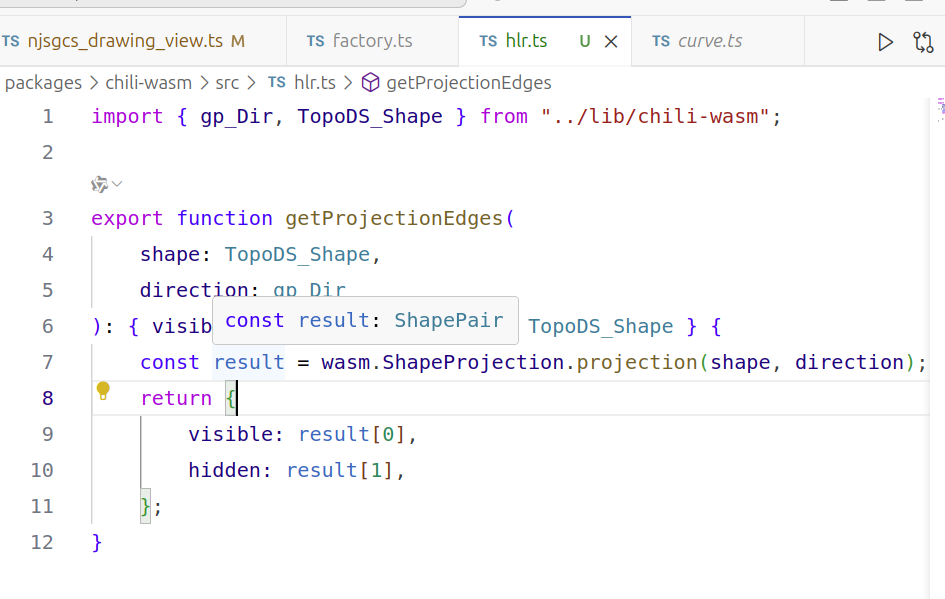
export function getProjectionEdges(shape: TopoDS_Shape,): { f_visible: LineSegmentList; f_hidden: LineSegmentList,s_visible: LineSegmentList; s_hidden: LineSegmentList,t_visible: LineSegmentList; t_hidden: LineSegmentList} {console.info("test1");const f_result = wasm.ShapeProjection.projection(shape, new wasm.gp_Dir(0, 1, 0));console.info("first:"+f_result.visible.get(0)?.first);const s_result = wasm.ShapeProjection.projection(shape, new wasm.gp_Dir( 1,0, 0));const t_result = wasm.ShapeProjection.projection(shape, new wasm.gp_Dir( 0, 0,1));return {f_visible: f_result.visible,f_hidden: f_result.hidden,s_visible: s_result.visible,s_hidden: s_result.hidden,t_visible: t_result.visible,t_hidden: t_result.hidden,};
}#include <BRepPrimAPI_MakeBox.hxx>
#include <BRepPrimAPI_MakeCylinder.hxx>
#include <BRepAlgoAPI_Cut.hxx>
#include <gp_Pnt.hxx>
#include <gp_Dir.hxx>
#include <gp_Ax2.hxx>
#include <HLRBRep_Algo.hxx>
#include <HLRBRep_HLRToShape.hxx>
#include <HLRAlgo_Projector.hxx>
#include <BRepAdaptor_Curve.hxx>
#include <GCPnts_UniformDeflection.hxx>
#include <TopExp_Explorer.hxx>
#include <TopoDS.hxx>
#include <vector>
#include <emscripten/bind.h>
#include <tuple>
#include <BRep_Tool.hxx>
#include <TopExp_Explorer.hxx>
#include <TopoDS_Edge.hxx>
#include <Geom_Line.hxx>
using namespace emscripten;
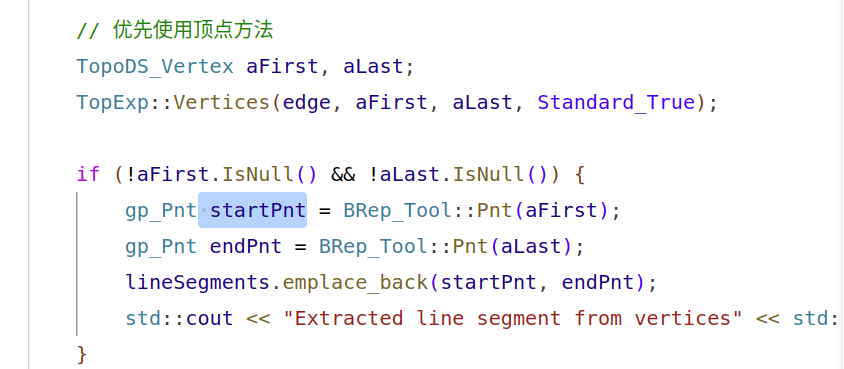
std::vector<std::pair<gp_Pnt, gp_Pnt>> ExtractLineSegments(const TopoDS_Shape& shape) { std::vector<std::pair<gp_Pnt, gp_Pnt>> lineSegments; for (TopExp_Explorer edgeExplorer(shape, TopAbs_EDGE); edgeExplorer.More(); edgeExplorer.Next()) { TopoDS_Edge edge = TopoDS::Edge(edgeExplorer.Current()); // 优先使用顶点方法 TopoDS_Vertex aFirst, aLast; TopExp::Vertices(edge, aFirst, aLast, Standard_True); if (!aFirst.IsNull() && !aLast.IsNull()) { gp_Pnt startPnt = BRep_Tool::Pnt(aFirst); gp_Pnt endPnt = BRep_Tool::Pnt(aLast); lineSegments.emplace_back(startPnt, endPnt); //std::cout << "startPnt: X=" << startPnt.X() << " Y=" << startPnt.Y() << " Z=" << startPnt.Z() << std::endl;} } return lineSegments;
}
// Convert 3D edge to 2D points
struct ProjectionResult {std::vector<std::pair<gp_Pnt, gp_Pnt>> visible;std::vector<std::pair<gp_Pnt, gp_Pnt>> hidden;ProjectionResult(const std::vector<std::pair<gp_Pnt, gp_Pnt>>& vis,const std::vector<std::pair<gp_Pnt, gp_Pnt>>& hid) : visible(vis), hidden(hid) {}
};class ShapeProjection { public: static ProjectionResult GetProjectionEdges(const TopoDS_Shape& shape, const gp_Dir& direction) { // Create projector gp_Ax3 viewAxis(gp_Pnt(0, 0, 0), direction); gp_Trsf transformation; transformation.SetTransformation(viewAxis); HLRAlgo_Projector projector(transformation, Standard_False, 0.0);// Create HLR algorithm Handle(HLRBRep_Algo) hlr_algo = new HLRBRep_Algo(); hlr_algo->Add(shape); hlr_algo->Projector(projector); hlr_algo->Update(); hlr_algo->Hide(); // Extract visible and hidden edges HLRBRep_HLRToShape hlr_to_shape(hlr_algo); TopoDS_Shape visible_edges = hlr_to_shape.VCompound(); TopoDS_Shape hidden_edges = hlr_to_shape.HCompound(); auto visible_line_segments = ExtractLineSegments(visible_edges);auto hidden_line_segments = ExtractLineSegments(hidden_edges); return ProjectionResult(visible_line_segments, hidden_line_segments); } }; using LineSegment = std::pair<gp_Pnt, gp_Pnt>;using LineSegmentList = std::vector<LineSegment>;
EMSCRIPTEN_BINDINGS(Shape_Projection) {value_object<LineSegment>("LineSegment").field("first", &LineSegment::first).field("second", &LineSegment::second);register_vector<LineSegment>("LineSegmentList");class_<ProjectionResult>("ProjectionResult").property("visible", &ProjectionResult::visible).property("hidden", &ProjectionResult::hidden);class_<ShapeProjection>("ShapeProjection").class_function("projection", &ShapeProjection::GetProjectionEdges);}
相关文章:
chili3d 笔记17 c++ 编译hlr 带隐藏线工程图
这个要注册不然emscripten编译不起来 --------------- 行不通 ---------------- 结构体 using LineSegment std::pair<gp_Pnt, gp_Pnt>;using LineSegmentList std::vector<LineSegment>; EMSCRIPTEN_BINDINGS(Shape_Projection) {value_object<LineSegment&g…...
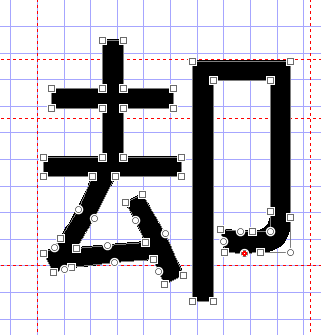
创建一个纯直线组成的字体库
纯直线组成的字体,一个“却”由五组坐标点组成,存储5个点共占21字节,使用简单,只要画直线即可, “微软雅黑”,2个轮廓,55坐标点,使用复杂,还填充。 自创直线字体 “微软…...

接口不是json的内容能用Jsonpath获取吗,如果不能,我们选用什么方法处理呢?
JsonPath 是一种专门用于查询和提取 JSON 数据的查询语言(类似 XPath 用于 XML)。以下是详细解答: JsonPath 的应用场景 API 响应处理:从 REST API 返回的 JSON 数据中提取特定字段。配置文件解析:读取 J…...
)
使用 Docker Compose 从零部署 TeamCity + PostgreSQL(详细新手教程)
JetBrains TeamCity 是一款专业的持续集成(CI)服务器工具,支持各种编程语言和构建流程。本文将一步一步带你用 Docker 和 Docker Compose 快速部署 TeamCity,搭配 PostgreSQL 数据库,并确保 所有操作新手可跟着做。 一…...
)
Go 语言实现高性能 EventBus 事件总线系统(含网络通信、微服务、并发异步实战)
前言 在现代微服务与事件驱动架构(EDA)中,事件总线(EventBus) 是实现模块解耦与系统异步处理的关键机制。 本文将以 Go 语言为基础,从零构建一个高性能、可扩展的事件总线系统,深入讲解&#…...
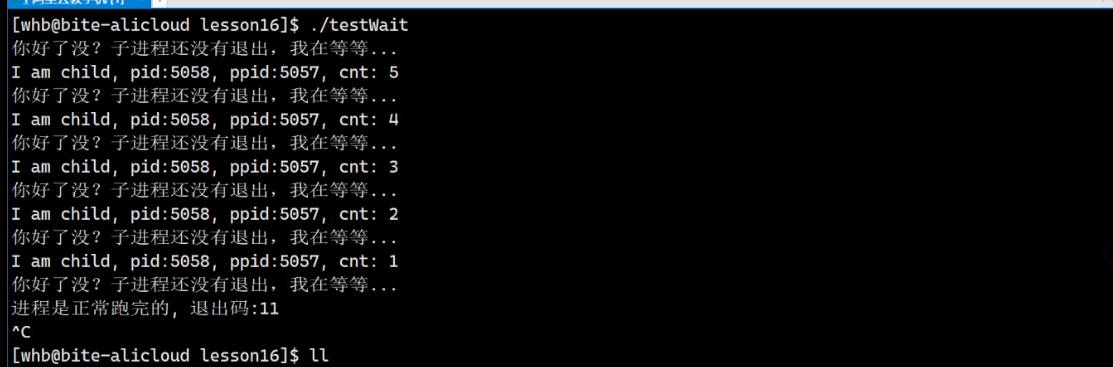
Linux进程(中)
目录 进程等待 为什么有进程等待 什么是进程等待 怎么做到进程等待 wait waitpid 进程等待 为什么有进程等待 僵尸进程无法杀死,需要进程等待来消灭他,进而解决内存泄漏问题--必须解决的 我们要通过进程等待,获得子进程退出情况--知…...
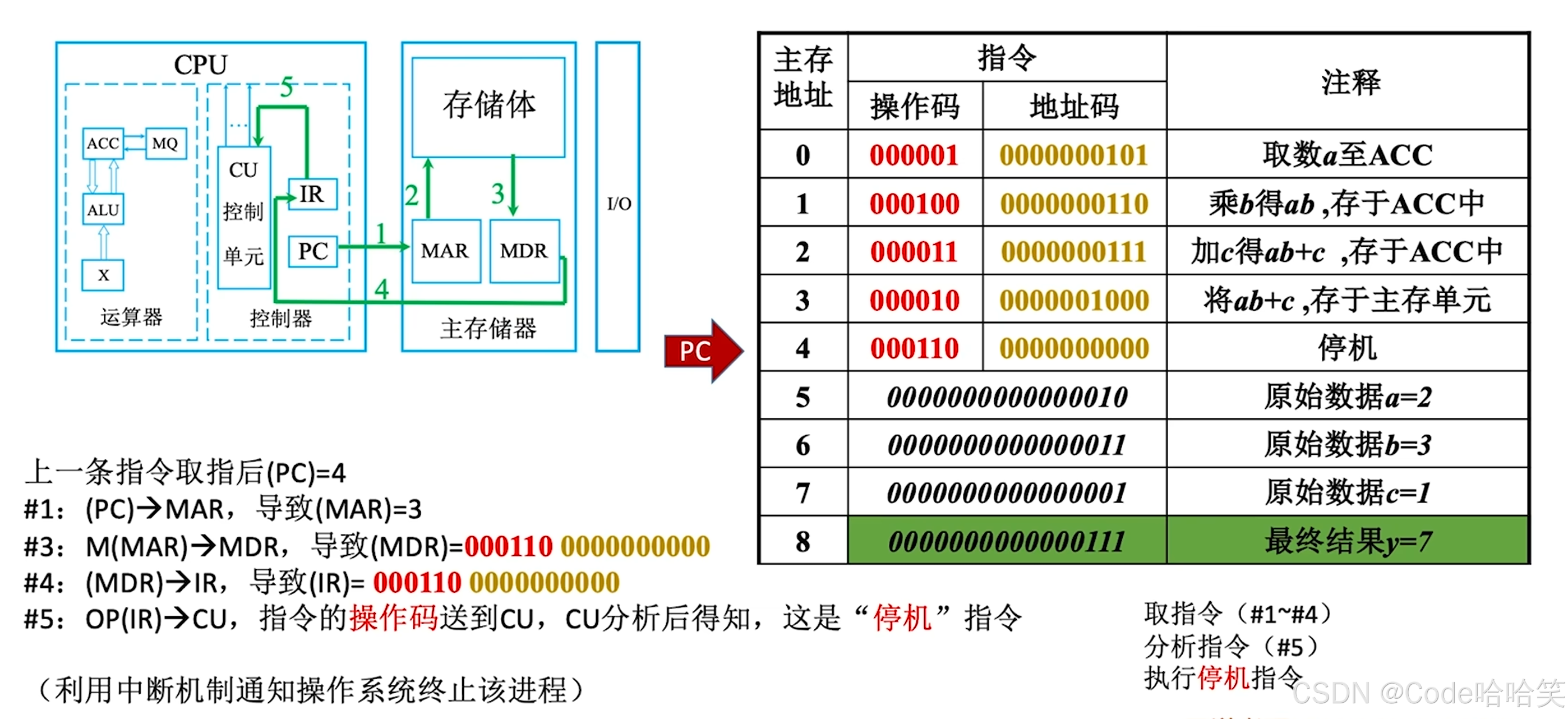
【计算机组成原理】计算机硬件的基本组成、详细结构、工作原理
引言 计算机如同现代科技的“大脑”,其硬件结构的设计逻辑承载着信息处理的核心奥秘。从早期程序员手动输入指令的低效操作,到冯诺依曼提出“存储程序”概念引发的革命性突破,计算机硬件经历了从机械操控到自动化逻辑的蜕变。本文将深入拆解…...
)
npm error Cannot read properties of null (reading ‘matches‘)
当在使用 npm 命令时遇到 Cannot read properties of null (reading matches) 错误,这通常表示代码尝试访问一个 null 对象的 matches 属性。以下是综合多个来源的解决策略,按优先级排列: 一、核心解决方法 1. 清理缓存与重新安装依赖&…...

MVC分层架构模式深入剖析
🔄 MVC 交互流程 #mermaid-svg-5xGt0Ka13DviDk15 {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-5xGt0Ka13DviDk15 .error-icon{fill:#552222;}#mermaid-svg-5xGt0Ka13DviDk15 .error-text{fill:#552222…...
【方案分享】蓝牙Beacon定位精度优化(包含KF、EKF与UKF卡尔曼滤波算法详解)
蓝牙Beacon定位精度优化:KF、EKF与UKF卡尔曼滤波算法详解 标签:蓝牙定位|Beacon|卡尔曼滤波|UKF|EKF|RSSI|室内定位|滤波算法|精度优化 相关分享:…...

新能源汽车热管理核心技术解析:冬季续航提升40%的行业方案
新能源汽车热管理核心技术解析:冬季续航提升40%的行业方案 摘要:突破续航焦虑的关键在热能循环! 👉 本文耗时72小时梳理行业前沿方案,含特斯拉/比亚迪等8家车企热管理系统原理图 一、热管理为何成新能源车决胜关键&am…...
)
LeetCode 239. 滑动窗口最大值(单调队列)
题目传送门:239. 滑动窗口最大值 - 力扣(LeetCode) 题意就是求每个窗口内的最大值,返回一个最大值的数组,滑动窗口的最值问题。 做法:维护一个单调递减队列,队头为当前窗口的最大值。 设计的…...
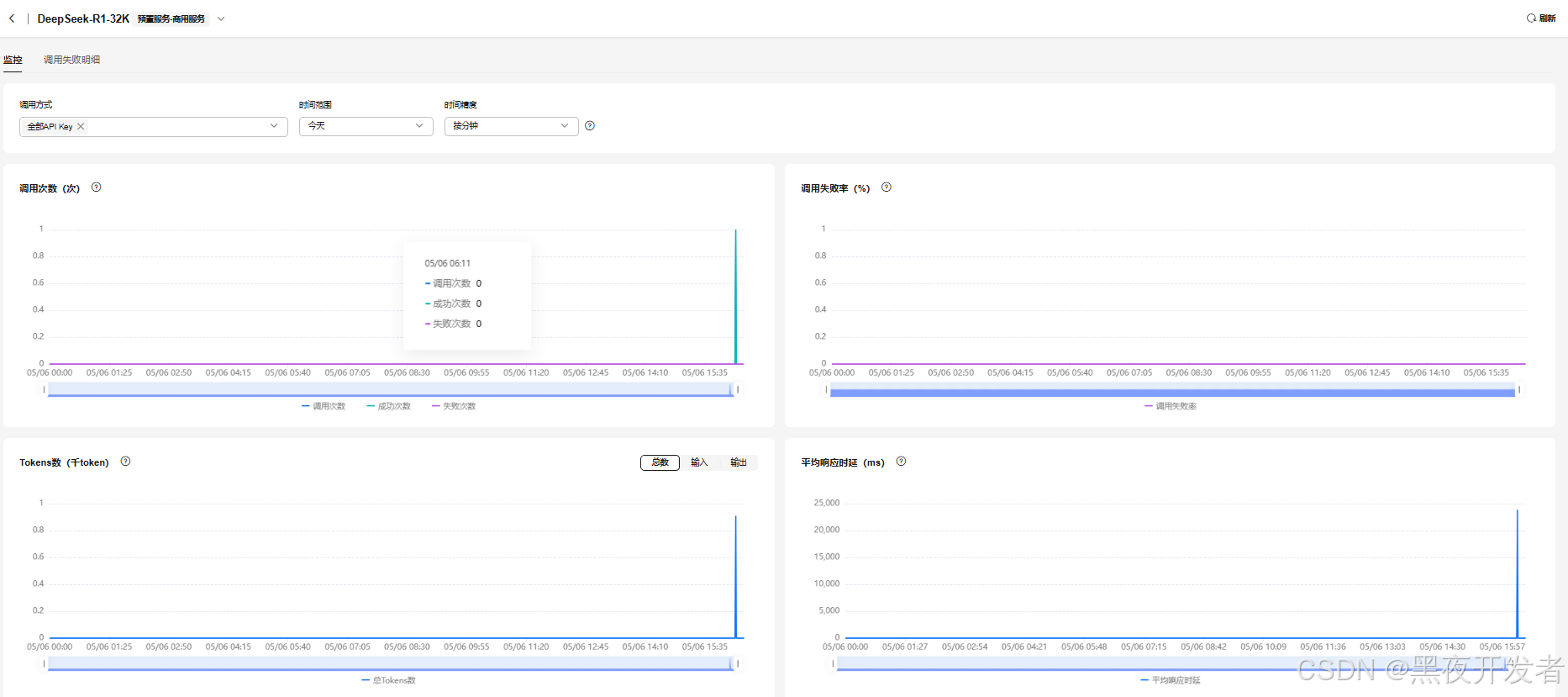
华为云Flexus+DeepSeek征文|DeepSeek-V3/R1开通指南及使用心得
🏆作者简介,黑夜开发者,CSDN领军人物,全栈领域优质创作者✌,CSDN博客专家,阿里云社区专家博主,2023年CSDN全站排名top 28。 🏆数年电商行业从业经验,AWS/阿里云资深使用用…...
)
鸿蒙图片缓存(一)
移动端开发过程中图片缓存功能是必备,iOS和安卓都有相关工具库,鸿蒙系统组件本身也自带缓存功能,但是遇到复杂得逻辑功能还是需要封装图片缓存工具。 系统组件Image 1. Image的缓存策略 Image模块提供了三级Cache机制,解码后内…...
运行示例程序和一些基本操作
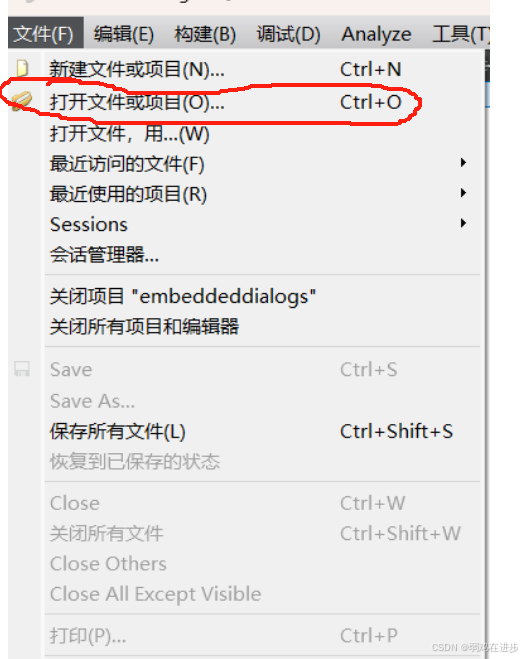
欢迎 ----> 示例 --> 选择sample CTRL B 编译代码 CTRL R 运行exe 项目 中 Shadow build 表示是否 编译生成文件和 源码是否放一块 勾上不在同一个地方 已有项目情况下怎么打开项目 方法一: 左键双击 xxx.pro 方法二: 文件菜单里面 选择打开项目...

学习数字孪生,为你的职业发展开辟新赛道
你有没有想过,未来十年哪些技能最吃香? AI、大数据、智能制造、元宇宙……这些词频繁出现在招聘市场和行业报告中。而在它们背后,隐藏着一个“看不见但无处不在”的关键技术——数字孪生(Digital Twin)。 它不仅在制造…...
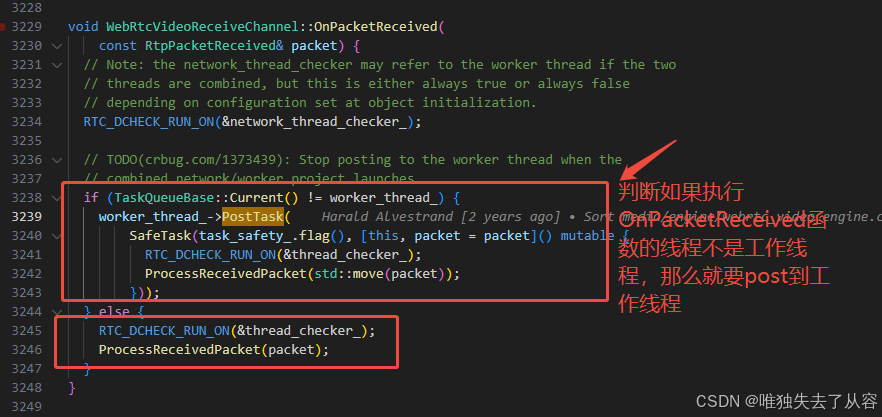
WebRTC源码线程-1
1、概述 本篇主要是简单介绍WebRTC中的线程,WebRTC源码对线程做了很多的封装。 1.1 WebRTC中线程的种类 1.1.1 信令线程 用于与应用层的交互,比如创建offer,answer,candidate等绝大多数的操作 1.1.2 工作线程 负责内部的处理逻辑&…...

python学习打卡day47
DAY 47 注意力热图可视化 昨天代码中注意力热图的部分顺移至今天 知识点回顾: 热力图 作业:对比不同卷积层热图可视化的结果 # 可视化空间注意力热力图(显示模型关注的图像区域) def visualize_attention_map(model, test_loader,…...
MySQL中的内置函数
文章目录 一、日期函数1.1 获取当前的日期1.2 获取当前时间1.3 获取当前日期和时间1.4 提取时间日期1.5 添加日期1.6 减少日期1.7 两个日期的差值 二、字符串处理函数2.1 获取字符串的长度2.2 获取字符串的字节数2.3 字符串拼接2.4 转小写2.5 转大写2.6 子字符串第⼀次出现的索…...

Ansible自动化运维全解析:从设计哲学到实战演进
一、Ansible的设计哲学:简单即正义 在DevOps工具链中,Ansible以其"无代理架构(Agentless)"设计独树一帜。这个用Python编写的自动化引擎,通过SSH协议与目标主机通信,彻底摒弃了传统配置管理工具…...

YOLOv8n行人检测实战:从数据集准备到模型训练
YOLOv8n行人检测实战:从数据集准备到模型训练 一、为什么选择YOLOv8?二、环境准备2.1 环境配置解析 三、安装Ultralytics框架四、数据集准备与理解4.1 数据集下载4.2 数据集结构4.3 YOLO标签格式解析 五、数据集可视化:理解标注数据5.1 可视化…...
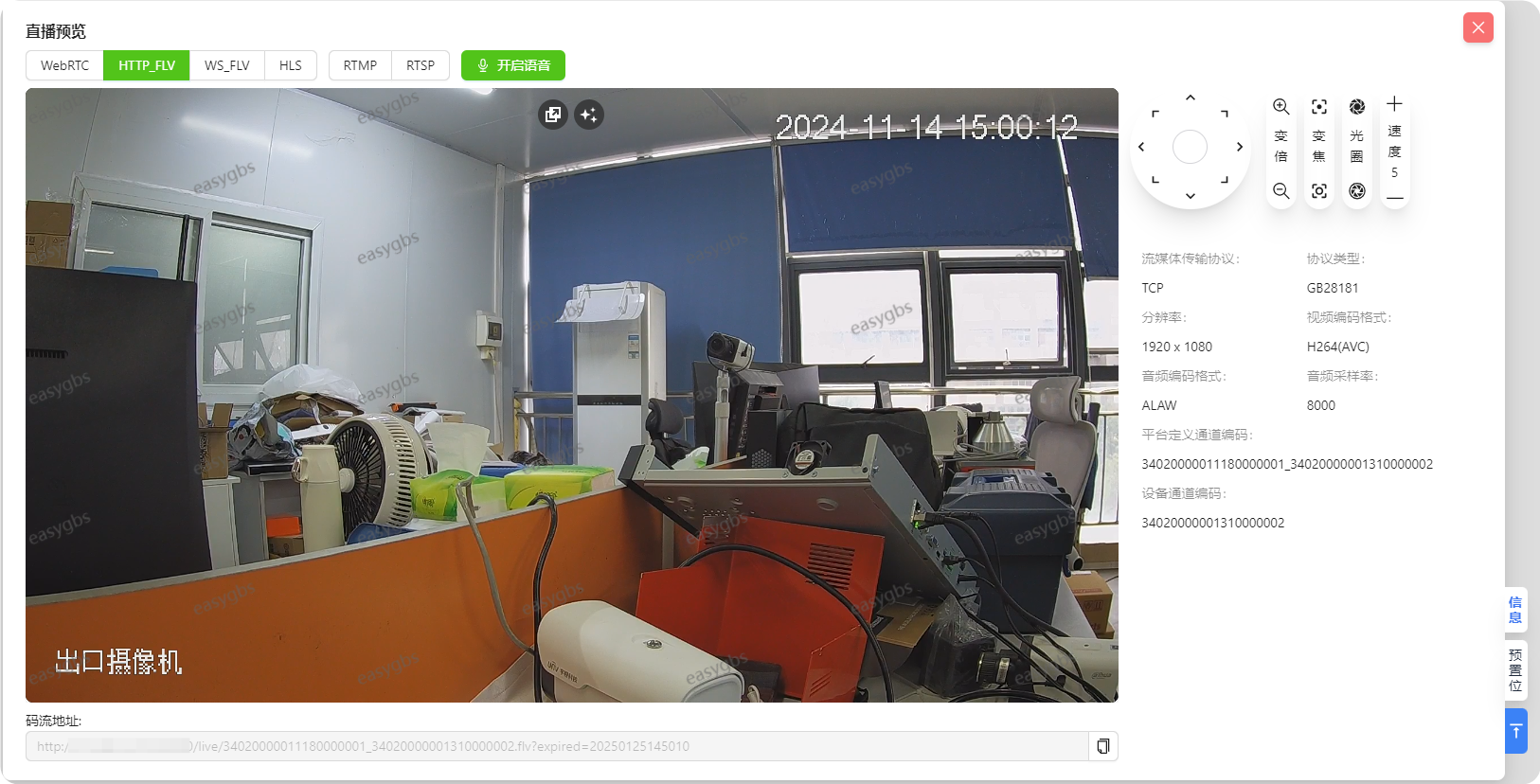
国标GB28181设备管理软件EasyGBS远程视频监控方案助力高效安全运营
一、方案背景 在商业快速扩张的背景下,连锁店门店数量激增,分布范围广。但传统人工巡检、电话汇报等管理方式效率低下,存在信息滞后、管理盲区,难以掌握店铺运营情况,影响企业效率与安全。网络远程视频监控系统可有…...
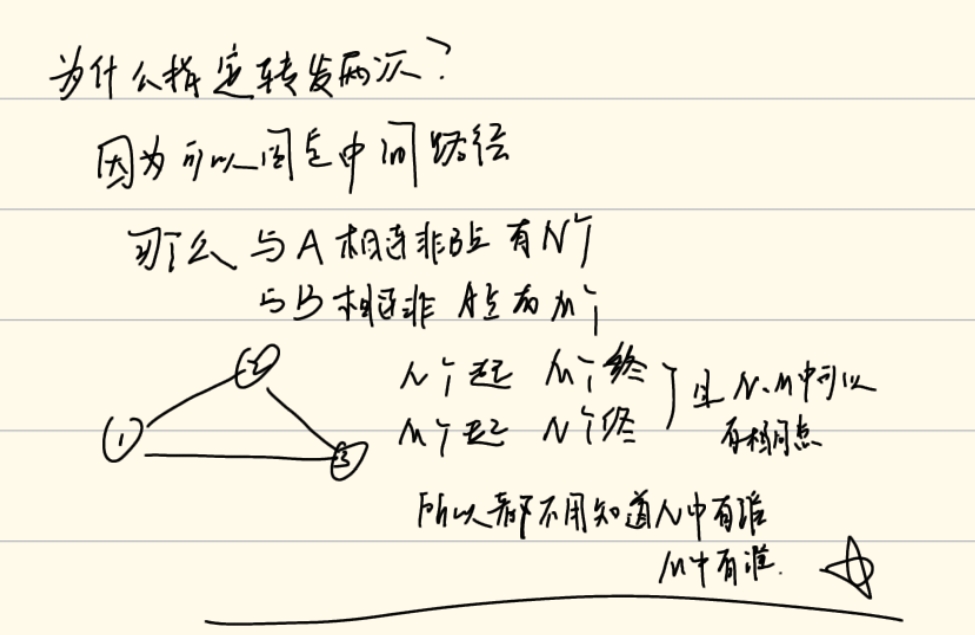
网络寻路--图论
所以我们固定题中M条边(因为这M条一定联通) P8605 [蓝桥杯 2013 国 AC] 网络寻路 - 洛谷 #include<bits/stdc.h> using namespace std; #define N 100011 typedef long long ll; typedef pair<int,int> pii; int n,m; int d[N],u[N],v[N]…...
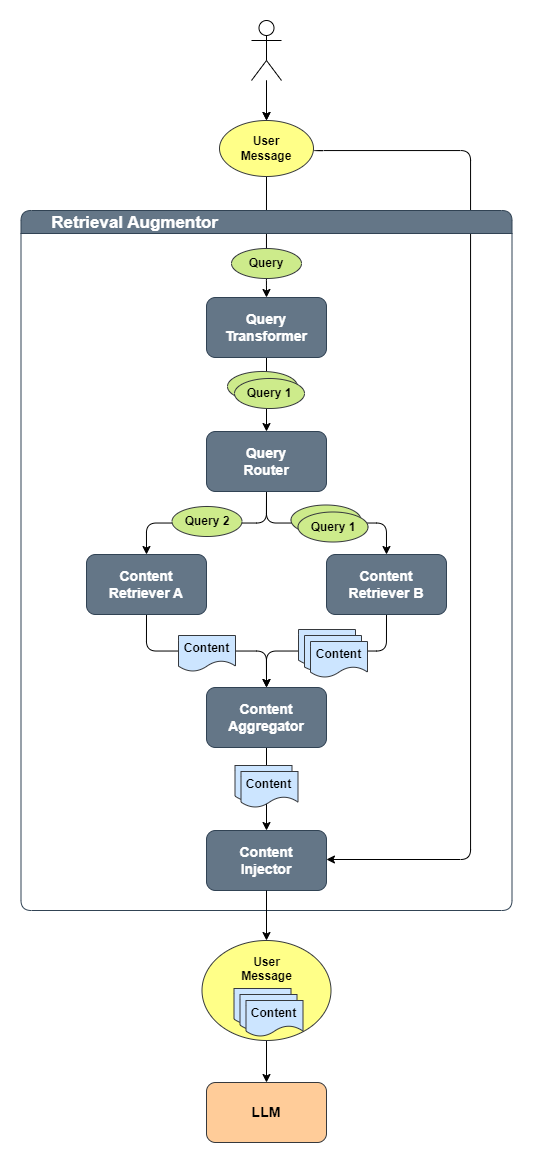
LangChain4j 学习教程项目
LangChain4j 学习教程 项目地址项目简介主要功能使用的技术和库项目环境配置环境要求 依赖版本每天学习内容和目标Day 01Day 02Day 03Day 04Day 05Day 06Day 07Day 08Day 09Day 10Day 11Day 12重点学习内容 RAG 经过为期12天(日均1小时)的LangChain4j源码…...

【Go语言基础【15】】数组:固定长度的连续存储结构
文章目录 零、概述一、数组基础1、数组的本质:固定长度的连续存储结构2、声明与初始化3、访问与修改元素 二、数组拷贝与传参1、 值拷贝特性2、指针数组的拷贝3、函数传参(值传递) 三、数组遍历四、多维数组五、数组与切片的区别 零、概述 数…...

【读论文】U-Net: Convolutional Networks for Biomedical Image Segmentation 卷积神经网络
摘要1 Introduction2 Network Architecture3 Training3.1 Data Augmentation 4 Experiments5 Conclusion背景知识卷积激活函数池化上采样、上池化、反卷积softmax 归一化函数交叉熵损失 Olaf Ronneberger, Philipp Fischer, Thomas Brox Paper:https://arxiv.org/ab…...

Komiko 视频到视频功能炸裂上线!
Komiko 平台作为行业的创新先锋,近日宣布推出全新的视频到视频(Video-to-Video)功能,这一举措犹如一颗重磅炸弹,瞬间在漫画、动画和插画创作的世界里掀起了惊涛骇浪,进一步巩固了其作为 AI 驱动的一体化创作…...
Linux 文件系统与 I/O 编程核心原理及实践笔记
文章目录 一、理解文件1.1 狭义理解1.2 广义理解1.3 文件操作的归类认识1.4 系统角度:进程与文件的交互1.5 实践示例 二、回顾 C 文件接口2.1 hello.c 打开文件2.2 hello.c 写文件2.3 hello.c 读文件2.4 输出信息到显示器的几种方法2.5 stdin & stdout & st…...
vite+tailwind封装组件库
前言 演示视频 https://www.bilibili.com/video/BV1EST3zPEyP/?spm_id_from333.1387.homepage.video_card.click 参考 https://juejin.cn/post/7112295067682865166 https://juejin.cn/post/7046187185615142949 代码仓库 https://gitee.com/malguy/vite-components-li…...

Gin框架实战指南:从入门到进阶
Gin框架实战指南:从入门到进阶 在当今的后端开发领域,Gin框架以其高性能、简洁易用的特点,赢得了众多Go语言开发者的青睐。本文将带你深入探索Gin框架的方方面面,从基础的安装与使用,到响应处理、请求参数解析、中间件…...