如何理解机器人课程的技术壁垒~壁垒和赚钱是两件不同的事情
答疑:
有部分朋友私聊说博客内容,越来越不适合人类阅读习惯……
可以做这种理解,我从23年之后,博客会不会就是写给机器看的。
或者说我在以黑盒方式测试AI推荐的风格。
主观-客观-主观螺旋式发展过程。
2015最早的一篇博客重点是配图:


个体能量也是个体能力的重要组成部分。
转载视频:
现在哪些方向存在较高技术壁垒?
这里面提及的内容,在一本学术著作《个体知识》中也有系统论述。
点评《个体知识:朝向后批判哲学》——知识与个人参与的深度融合
《个体知识:朝向后批判哲学》(通常也译作《个人知识:朝向后批判哲学》)是迈克尔·波兰尼的哲学巨著,它不仅颠覆了传统客观主义科学观,还深入探讨了知识的本质与个人参与在认知过程中的核心作用。结合之前关于机器人课程技术壁垒的讨论,我们可以从多个维度来点评这部作品,尤其是它如何启示我们理解技术、知识与个人之间的关系。
一、对传统客观主义科学观的颠覆
波兰尼在《个体知识》中明确反对将知识视为完全客观、与个人无关的实体。他认为,任何知识的背后都存在着更为基本的个人因素,这一观点与机器人课程技术壁垒中的某些现象不谋而合。在机器人技术的研发过程中,核心零部件技术、感知与交互技术等领域的突破,往往依赖于科研人员的个人智慧、热情和创造力。这些个人因素不仅推动了技术的进步,也构成了技术壁垒的重要组成部分。波兰尼的哲学思考提醒我们,在追求技术突破的同时,不应忽视个人的主观能动性和认知参与。
二、知识的隐默性与个人参与
波兰尼强调,人的认知运转中活跃着一种与认知个体活动无法分离、不可言传只能默会的隐性认知功能,这种默会认知正是一切知识的基础和内在本质。在机器人课程的技术壁垒中,这种隐默性同样显著。例如,在运动控制技术的研发中,步态控制与平衡的实现不仅依赖于精确的算法和传感器,还依赖于科研人员对机器人动态特性的深刻理解和直觉判断。这种理解和判断往往难以用言语明确表达,但却在科研过程中发挥着至关重要的作用。波兰尼的理论为我们理解这种隐默性提供了哲学基础,也启示我们在机器人课程教学中应更加注重培养学生的直觉和默会认知能力。
三、个人知识与技术壁垒的构建
波兰尼认为,知识不仅仅是对事实的描述,更是个人做出的一项负责任的承诺,传达的是自己的深层信念。在机器人课程的技术壁垒中,这种个人知识与信念的结合尤为明显。掌握核心零部件技术、感知与交互技术等关键领域的企业或科研团队,往往是因为其成员对技术的深刻理解和坚定信念,才能够在激烈的市场竞争中脱颖而出。这种个人知识与信念的结合,构成了技术壁垒的重要组成部分,也为企业或团队带来了持续的创新动力。
四、后批判哲学与知识发展的路径
波兰尼提出的后批判哲学,旨在从客观主义中解放出来,肯定信念对于知识的必要前提性,并发现我们真正相信的东西并使之形式化。在机器人课程的技术发展中,这种后批判哲学的态度同样重要。面对技术壁垒和盈利挑战,我们不能仅仅依赖于传统的客观主义科学观,而应该更加关注个人的主观能动性和认知参与。通过鼓励科研人员发挥个人智慧和创造力,我们能够更好地突破技术壁垒,推动机器人技术的持续发展。
五、对机器人课程教学的启示
波兰尼的《个体知识》对机器人课程教学具有重要的启示意义。首先,它提醒我们在教学中应更加注重培养学生的默会认知能力和直觉判断能力,而不仅仅是传授显性知识。其次,它鼓励我们在教学中融入更多的实践环节,让学生在实践中发现问题、解决问题,从而深化对知识的理解和掌握。最后,它启示我们在教学中应关注学生的个人兴趣和信念培养,激发他们的学习热情和创造力,为机器人技术的未来发展培养更多优秀的人才。
结语
《个体知识:朝向后批判哲学》是一部具有深远影响的哲学著作,它不仅为我们理解知识的本质提供了新的视角,也为机器人课程的教学和技术发展提供了重要的启示。在追求技术突破和知识创新的道路上,我们应该更加关注个人的主观能动性和认知参与,让知识与个人深度融合,共同推动机器人技术的持续发展。正如波兰尼所言,知识不仅仅是对事实的描述,更是个人做出的一项负责任的承诺。在机器人课程的教学和技术发展中,我们也应该秉持这种信念,不断探索和创新,为机器人技术的未来发展贡献自己的力量。
效率:

通俗而言,快速掌握一门新课程的效率就是壁垒,充分体现了一个人对新事物的接受能力。
训练的AI写出的文笔实在是怪异:
理解机器人课程的技术壁垒:壁垒与盈利的差异化视角
在机器人技术迅猛发展的今天,机器人课程作为教育与科技融合的前沿领域,正吸引着越来越多的关注。然而,机器人课程的技术壁垒与盈利模式,虽相关却截然不同,需要我们从多个维度深入剖析。本文旨在借鉴CSDN博主ZhangRelay的风格,探讨如何理解机器人课程的技术壁垒,并澄清壁垒与盈利之间的本质区别。
一、机器人课程的技术壁垒解析
机器人课程的技术壁垒,主要体现在以下几个方面:
- 核心零部件技术:
- 减速器、伺服系统、控制器:作为工业机器人的三大核心零部件,它们在机器人课程中同样占据举足轻重的地位。减速器的高精度、高刚度要求,伺服系统的动力输出与控制精度,以及控制器的智能化水平,都是机器人课程必须攻克的技术难关。
- 成本占比与毛利率:核心零部件的成本占机器人总体成本的60%以上,其中减速器成本占比最高,达30%,毛利率也相应较高。这表明,掌握核心零部件技术,是降低课程成本、提升竞争力的关键。
- 感知与交互技术:
- 环境感知:机器人需要能够准确感知周围环境,包括障碍物、地形变化等,以实现自主导航与避障。这要求机器人具备高精度的传感器和先进的算法支持。
- 人机交互:机器人必须能够准确理解人类语言和行为,并做出恰当回应。这涉及到自然语言处理、语音识别、情感识别等多项技术,是机器人课程中的另一大技术壁垒。
- 运动控制技术:
- 步态控制与平衡:对于人形机器人而言,实现稳定、灵活的步态控制和平衡是运动控制技术的核心。这要求机器人具备高度的自由度和精确的平衡控制能力,是机器人课程中的又一技术难点。
- 动力学与运动学:运动控制技术还涉及到动力学、运动学等复杂问题,需要确保机器人在不同地形和环境中都能保持平衡,并进行各种动作和运动。
- 人工智能与算法:
- 机器学习与深度学习:机器人需要具备自主学习和适应能力,这要求机器人课程融入机器学习、深度学习等先进技术,以提升机器人的感知、学习和决策能力。
- 多模态大模型:通过融合语音、图像、文本、传感信号等多模态信息,为人形机器人的感认知和决策规划提供更强的多模态理解、生成和关联能力,是提升机器人智能化水平的关键。
二、壁垒与盈利:两件不同的事情
在探讨机器人课程的技术壁垒时,我们必须明确一点:壁垒与盈利是两件不同的事情。技术壁垒是机器人课程发展的内在挑战,而盈利则是其外在表现。
- 技术壁垒的挑战性:
- 技术壁垒的存在,使得机器人课程的研发周期长、投入成本高。企业需要不断投入资金进行研发,以保持竞争优势。
- 同时,技术壁垒也限制了新进入者的数量,使得市场竞争相对有限。然而,这并不意味着已经进入的企业就能轻松盈利。
- 盈利模式的多样性:
- 机器人课程的盈利模式并不局限于硬件销售。随着技术的不断进步和应用场景的拓展,机器人课程的盈利模式正变得越来越多样化。
- 例如,通过提供定制化服务、开发增值应用、建立生态系统等方式,企业可以挖掘更多的盈利空间。
- 壁垒与盈利的辩证关系:
- 技术壁垒虽然增加了研发成本和市场进入难度,但也为企业提供了差异化竞争的机会。掌握核心技术的企业,往往能够在市场中占据领先地位,从而实现盈利。
- 然而,盈利并非仅仅依赖于技术壁垒。企业还需要关注市场需求、用户体验、成本控制等多个方面,以构建可持续的盈利模式。
三、应对策略与建议
面对机器人课程的技术壁垒与盈利挑战,企业和教育机构可以采取以下策略:
- 加强技术研发与创新:
- 持续投入资金进行技术研发,掌握核心零部件技术和感知与交互技术等关键领域。
- 关注前沿技术动态,及时引入新技术、新算法,提升机器人的智能化水平。
- 优化课程体系与教学方法:
- 设计科学合理的课程体系,注重理论与实践相结合,提升学生的动手能力和创新思维。
- 采用项目式学习、案例教学等教学方法,激发学生的学习兴趣和积极性。
- 拓展应用场景与市场需求:
- 深入挖掘机器人技术在教育、医疗、工业等领域的应用潜力,拓展市场需求。
- 加强与行业企业的合作,共同推动机器人技术的商业化应用。
- 关注成本控制与盈利模式:
- 优化供应链管理,降低生产成本;提高生产效率,缩短研发周期。
- 探索多元化的盈利模式,如提供增值服务、建立生态系统等,实现可持续发展。
四、结语
机器人课程的技术壁垒与盈利模式是两个既相关又不同的概念。技术壁垒是机器人课程发展的内在挑战,需要企业和教育机构不断投入资源进行研发和创新;而盈利模式则是其外在表现,需要企业关注市场需求、用户体验和成本控制等多个方面。只有正确理解并应对这两方面的挑战,才能在机器人课程领域取得长足的发展。正如CSDN博主ZhangRelay所言:“技术壁垒虽高,但盈利之路并非遥不可及。关键在于我们如何把握机遇,勇于创新,不断前行。”
我没说过这些话……尤其是上面最后两行话。
摘要:机器人课程的技术壁垒与盈利模式存在本质差异,《个体知识》为理解二者关系提供了哲学视角。技术壁垒体现在核心零部件、感知交互、运动控制等领域的研发难度,涉及科研人员的默会认知与个人参与;而盈利则需要关注市场需求、成本控制等商业因素。波兰尼的知识理论启示我们:技术突破依赖于个人智慧与创造力构建的隐性壁垒,教学应注重培养默会认知能力。只有区分技术研发与商业化的不同逻辑,才能推动机器人领域的可持续发展。
《个体知识:朝向后批判哲学》对传统科学观产生了显著的颠覆,主要体现在以下几个方面:
- 反对客观主义科学观:
- 传统科学观倾向于将知识视为完全客观、独立于个人之外的实体,强调知识的普遍性和可验证性。然而,波兰尼在《个体知识》中明确反对这种观点,他认为任何知识的背后都存在着更为基本的个人因素,知识并非完全脱离个人认知的客观存在。
- 强调个人参与在认知中的核心作用:
- 波兰尼提出,认知过程中个人的主观能动性和参与是不可或缺的。他认为,人的认知运转中活跃着一种与认知个体活动无法分离、不可言传只能默会的隐性认知功能(默会认知),这种认知功能是一切知识的基础和内在本质。这与传统科学观中将个人视为知识被动接受者的观点截然不同。
- 揭示知识的隐默性:
- 波兰尼强调,知识不仅仅是可以用语言明确表达的内容,还包括大量难以言传、只能通过个人实践和体验来获得的隐默知识。这种隐默性在知识的获取、传递和应用中起着至关重要的作用,而传统科学观往往忽视了这一点。
- 提出后批判哲学态度:
- 波兰尼的后批判哲学主张从客观主义的束缚中解放出来,肯定信念对于知识的必要前提性。他认为,科学发现和知识创新往往源于个人的信念和直觉,而不是纯粹的逻辑推理和客观验证。这种态度对传统科学观中过分强调客观性和可验证性的倾向构成了挑战。
- 重构知识与真理的关系:
- 在传统科学观中,真理被视为与客观现实相符合的知识。然而,波兰尼认为,真理不仅仅是对现实的客观描述,还包含了个人对现实的解释和理解。这种对真理的新理解进一步削弱了传统科学观中知识的绝对客观性。
后批判哲学态度对客观观察者的解放主要体现在以下几个方面,这些方面共同构成了对传统客观主义科学观的超越,为观察者提供了更广阔的认知空间和更丰富的认知方式:
- 打破纯粹客观性的束缚:
- 超越绝对客观性:传统科学观强调观察者的绝对客观性,认为观察者应排除一切主观因素,以纯粹客观的态度获取知识。后批判哲学态度则认为,这种绝对客观性的追求是不现实的,因为观察者本身就是认知过程的一部分,其主观因素不可避免地会影响认知结果。因此,后批判哲学态度解放了观察者,使其不再受制于追求绝对客观性的束缚。
- 承认个人因素的合法性:后批判哲学态度肯定个人因素在认知过程中的合法性,认为观察者的信念、直觉、经验等主观因素都是知识的重要组成部分。这种承认使得观察者能够更加自信地表达自己的观点和见解,而无需担心被指责为不客观。
- 强化信念与直觉的作用:
- 肯定信念的必要性:波兰尼在后批判哲学中强调,信念是知识的必要前提,没有信念就没有知识。这种观点解放了观察者,使其认识到信念在认知过程中的重要作用,从而更加积极地运用自己的信念去探索和理解世界。
- 重视直觉的价值:后批判哲学态度还重视直觉在认知过程中的价值。直觉是一种快速、非逻辑的认知方式,它能够帮助观察者迅速把握事物的本质和规律。在后批判哲学的视野下,观察者可以更加自信地依赖自己的直觉进行认知活动,而无需过分依赖逻辑推理和客观验证。
- 促进认知的多样性和灵活性:
- 鼓励多元认知方式:后批判哲学态度鼓励观察者采用多元的认知方式,包括理性思考、直觉判断、情感体验等。这种多元性使得观察者能够更加全面地理解和把握世界,而不仅仅局限于传统的客观观察方式。
- 增强认知的灵活性:后批判哲学态度还增强了观察者的认知灵活性。观察者可以根据不同的情境和需求,灵活地调整自己的认知方式和策略,以更好地适应变化的环境和任务。
- 推动科学与人文的融合:
- 弥合科学与人文的鸿沟:传统科学观往往将科学与人文视为两个截然不同的领域,强调科学的客观性和人文的主观性。后批判哲学态度则试图弥合这种鸿沟,认为科学与人文都是人类认知世界的重要方式,它们之间应该相互补充、相互促进。
- 促进跨学科研究:在后批判哲学的推动下,观察者可以更加积极地参与跨学科研究,将不同领域的知识和方法相结合,以产生新的认知成果和创新思路。这种跨学科的研究方式不仅丰富了观察者的认知视野,也为其提供了更多的发展机会和空间。
后批判哲学通过以下几个关键途径解放观察者,使其更自信:
- 打破纯粹客观性迷信:
- 认知主体性确认:后批判哲学颠覆了传统科学观对绝对客观性的追求,强调观察者作为认知主体的必然存在。通过承认观察者的主观性不可消除,它消除了观察者因无法完全客观而产生的自我怀疑,使观察者认识到主观性是认知过程的合法组成部分。
- 方法论去神圣化:传统科学方法常被赋予神圣地位,后批判哲学则通过揭示方法论的局限性,使观察者摆脱对特定方法的盲目崇拜。这种去神圣化过程赋予观察者选择和调整认知工具的自主权,从而增强其认知自信。
- 重构知识可信性基础:
- 个人承诺合法化:波兰尼提出的知识个人承诺理论,将观察者的信念与知识生产直接关联。当观察者认识到知识生产本质上是个人信念的延伸时,其知识主张不再需要外部权威背书,这种合法化过程直接提升了观察者的表达自信。
- 隐默知识价值显性化:通过揭示隐默知识在认知中的基础性作用,后批判哲学为观察者的直觉、经验等非形式化认知提供理论正当性。这种价值显性化使观察者敢于依赖自身隐性认知能力,从而在知识生产中展现更大自信。
- 建立认知责任框架:
- 责任转移机制:传统认知模式将错误归咎于观察者主观偏差,后批判哲学则将认知责任重构为共同体责任。这种责任框架的转移,使观察者从个人错误的恐惧中解放,转而关注认知过程的持续改进,从而增强其参与认知活动的心理安全感。
- 批判性自我对话:后批判哲学鼓励观察者开展建设性自我批判,通过将批判对象从个人转向认知系统,观察者得以在反思中保持认知自信。这种批判性对话机制使观察者既能发现自身局限,又能维持对整体认知能力的信心。
- 拓展认知自由空间:
- 多元认知范式承认:后批判哲学通过承认不同认知范式的合法性,为观察者开辟了更广阔的认知选择空间。这种范式多元性使观察者能够根据任务特性选择最适宜的认知策略,避免因范式僵化导致的自信丧失。
- 创造性认知鼓励:通过强调认知过程中的创造性元素,后批判哲学激发观察者的创新勇气。当观察者认识到认知活动本质上是创造性实践时,其探索未知领域的自信将得到显著提升。
- 构建认知共同体支持:
- 认知多样性尊重:后批判哲学倡导的认知共同体强调成员差异性的价值,这种对多样性的尊重使观察者感受到自身独特认知方式的被接纳。在包容性共同体中,观察者不再因与主流观点差异而自我压抑,反而能通过差异化贡献增强自信。
- 对话性知识生产:通过建立对话性知识生产模式,后批判哲学将知识建构转化为共同体协作过程。在这种协作中,观察者既能获得同伴支持,又能通过思想碰撞提升认知能力,这种良性循环持续强化其认知自信。
后批判哲学通过主体性确认、知识基础重构、责任框架调整、自由空间拓展和共同体支持等五个维度,系统性地解放了观察者的认知束缚。这种解放不仅使观察者摆脱了传统科学观的认知枷锁,更通过理论正当性赋予、责任机制重构和支持系统建设,从深层次重塑了观察者的认知自信。当观察者认识到自身认知活动的合法性、价值和可能性时,其参与认知活动的主动性、创造性和坚持性都将获得质的提升。
相关文章:
如何理解机器人课程的技术壁垒~壁垒和赚钱是两件不同的事情
答疑: 有部分朋友私聊说博客内容,越来越不适合人类阅读习惯…… 可以做这种理解,我从23年之后,博客会不会就是写给机器看的。 或者说我在以黑盒方式测试AI推荐的风格。 主观-客观-主观螺旋式发展过程。 2015最早的一篇博客重…...

如何从零开始建设一个网站?
当你没有建站的基础和建站的知识,那么应该如何开展网站建设和网站管理。而今天的教程是不管你是为自己建站还是为他人建站都适合的。本教程会指导你如何进入建站,将建站的步骤给大家分解: 首先我们了解一下,建站需要那些步骤和流程…...
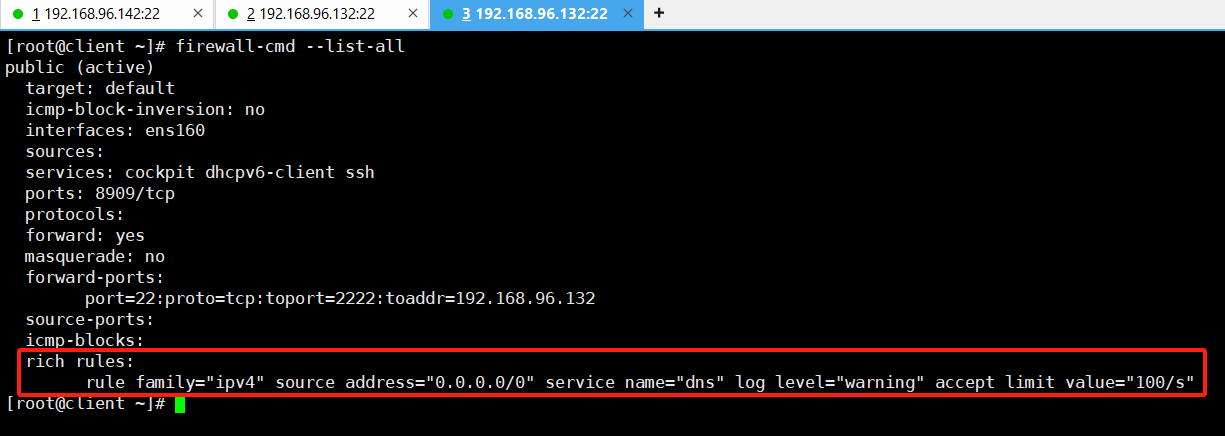
selinux firewalld
一、selinux 1.说明 SELinux 是 Security-Enhanced Linux 的缩写,意思是安全强化的 linux; SELinux 主要由美国国家安全局(NSA)开发,当初开发的目的是为了避免资源的误用 DAC(Discretionary Access Cont…...
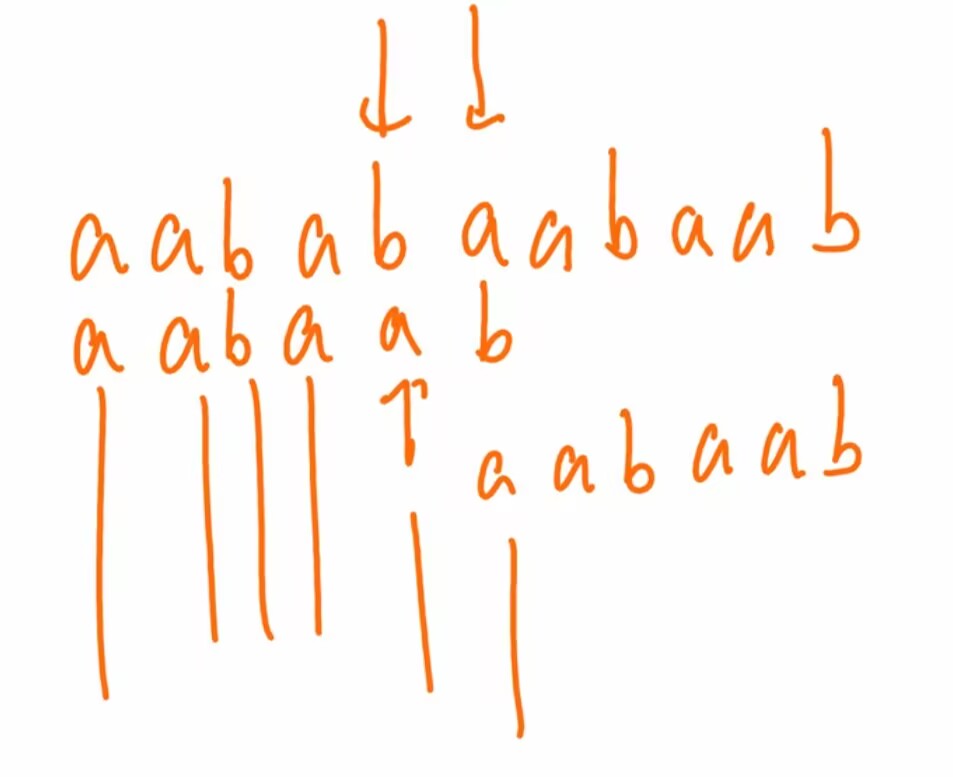
408第一季 - 数据结构 - 字符串和KMP算法
闲聊 这章属于难点但考频低 3个名词记一下:模式匹配,主串,字串(模式串) 举个例子 主串 aabaaaabaab 字串 aabaab 模式匹配 从主串找到字串 暴力解法 也是不多说 很暴力就是了 KMP算法 next数组 它只和字串有关 先…...

如何查看自己电脑安装的Java——JDK
开始->运行->然后输入cmd进入dos界面 (快捷键windows->输入cmd) 输入java -version,回车 出现了一下信息就是安装了jdk 输入java -verbose,回车 查看安装目录...

青少年编程与数学 01-011 系统软件简介 07 iOS操作系统
青少年编程与数学 01-011 系统软件简介 07 iOS操作系统 一、发展历程(一)诞生初期(2007 - 2008年)(二)功能拓展与升级(2009 - 2013年)(三)持续优化与创新&…...
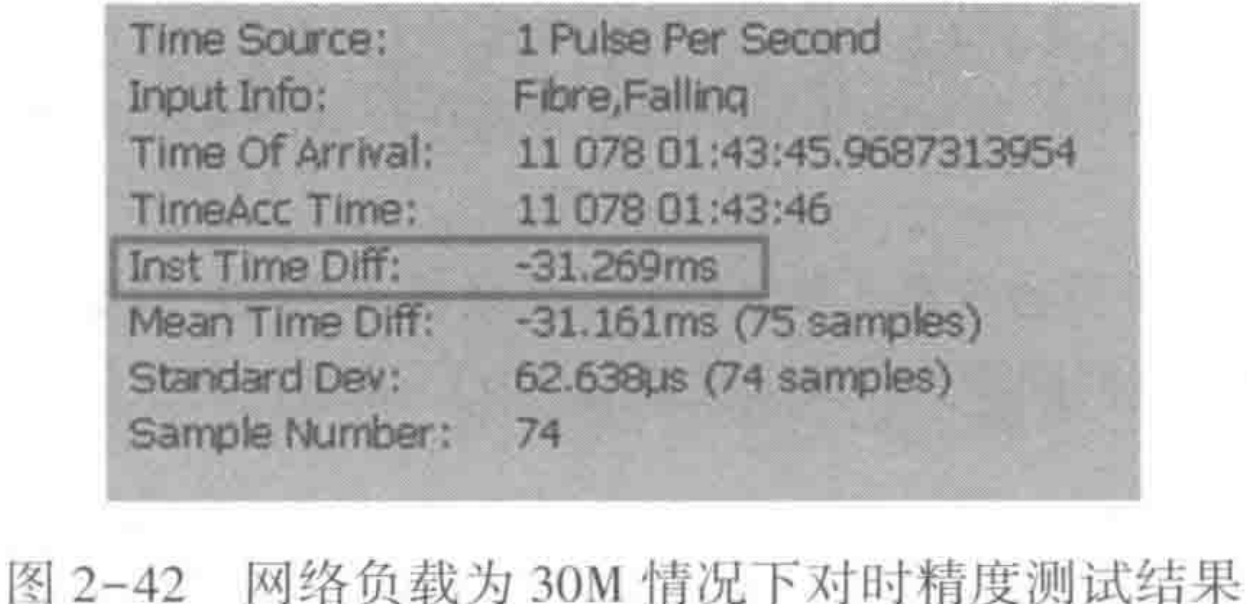
电力系统时间同步系统之三
2.6 电力系统时间同步装置 时间同步装置主要完成时间信号和时间信息的同步传递,并提供相应的时间格式和物理接口。时间同步装置主要由三大部分组成:时间输入、内部时钟和时间输出,如图 2-25 所示。输入装置的时间信号和时间信息的精度必须不…...
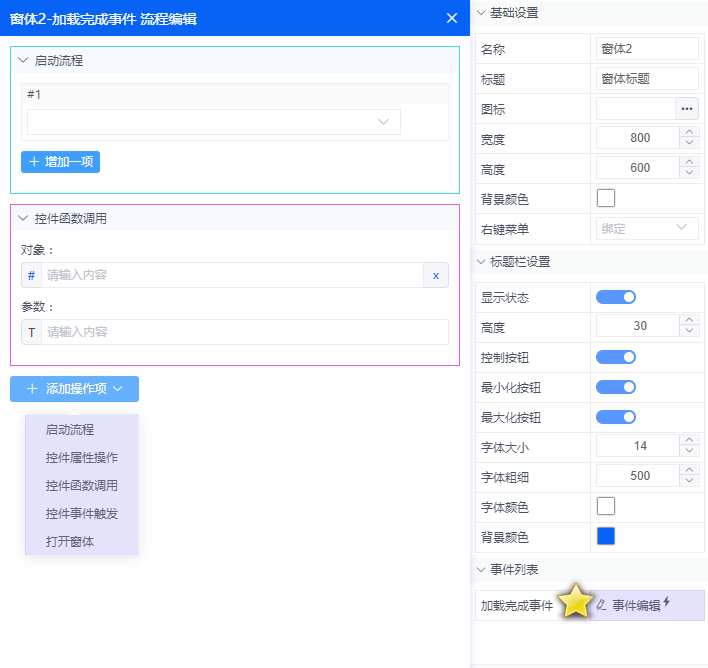
火语言RPA--界面应用详解
新建一个界面应用后,软件将自动弹出一个界面设计器,本篇将介绍下流程设计器中各部分的功能。 UI控件列表 显示软件中自带的所有UI控件流程库 流程是颗粒组件的容器,可在建立的流程中添加颗粒组件编写成规则流程。 流程编辑好后再绑定UI控件…...
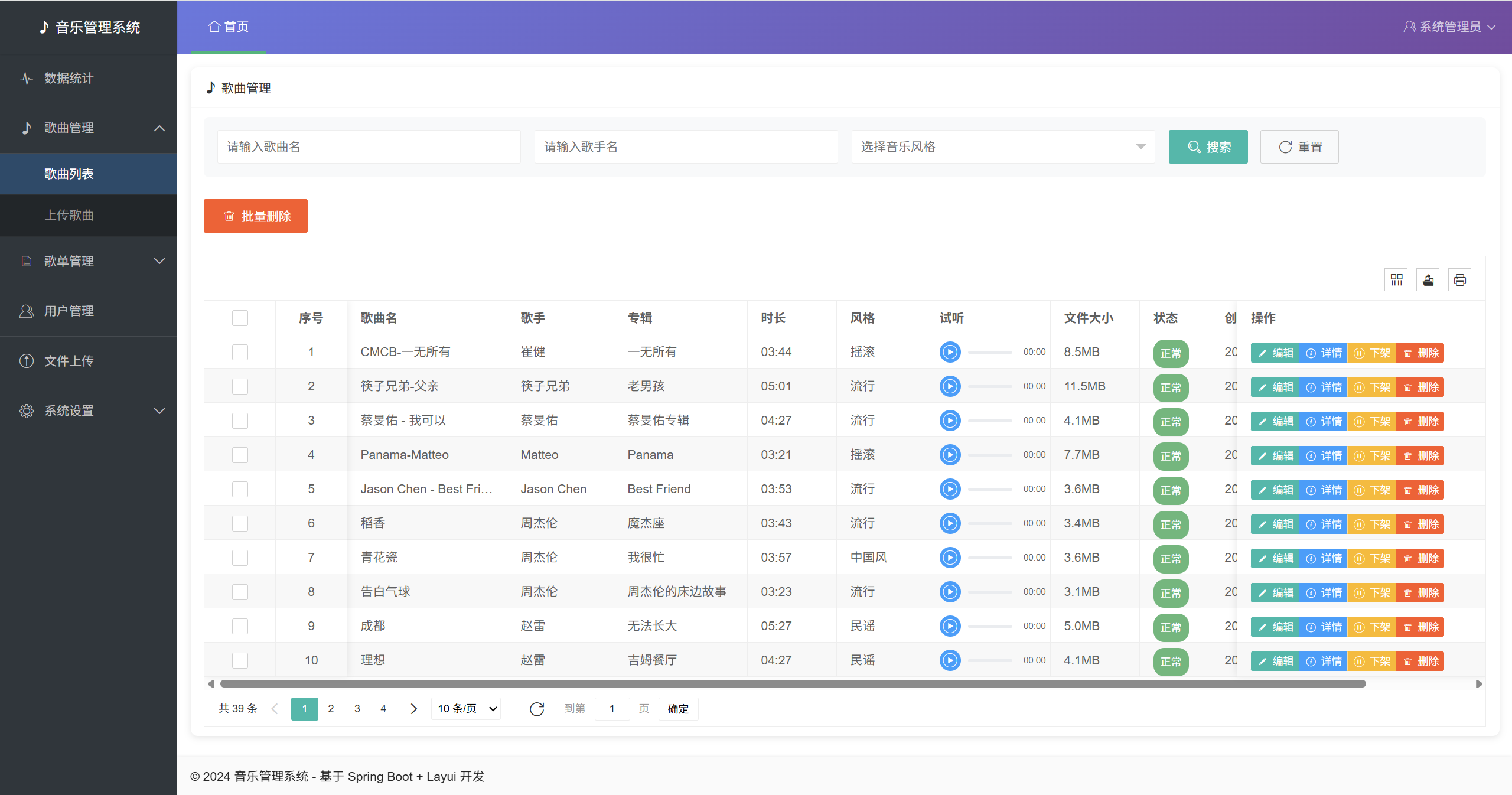
基于Spring Boot的云音乐平台设计与实现
基于Spring Boot的云音乐平台设计与实现——集成协同过滤推荐算法的全栈项目实战 📖 文章目录 项目概述技术选型与架构设计数据库设计后端核心功能实现推荐算法设计与实现前端交互设计系统优化与性能提升项目部署与测试总结与展望 项目概述 🎯 项目背…...
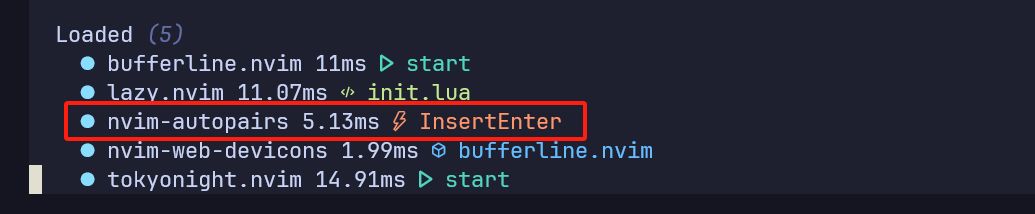
Neovim - 打造一款属于自己的编辑器(一)
文章目录 前言(劝退)neovim 安装neovim 配置配置文件位置第一个 hello world 代码拆分 neovim 配置正式配置 neovim基础配置自定义键位Lazy 插件管理器配置tokyonight 插件配置BufferLine 插件配置自动补全括号 / 引号 插件配置 前言(劝退&am…...
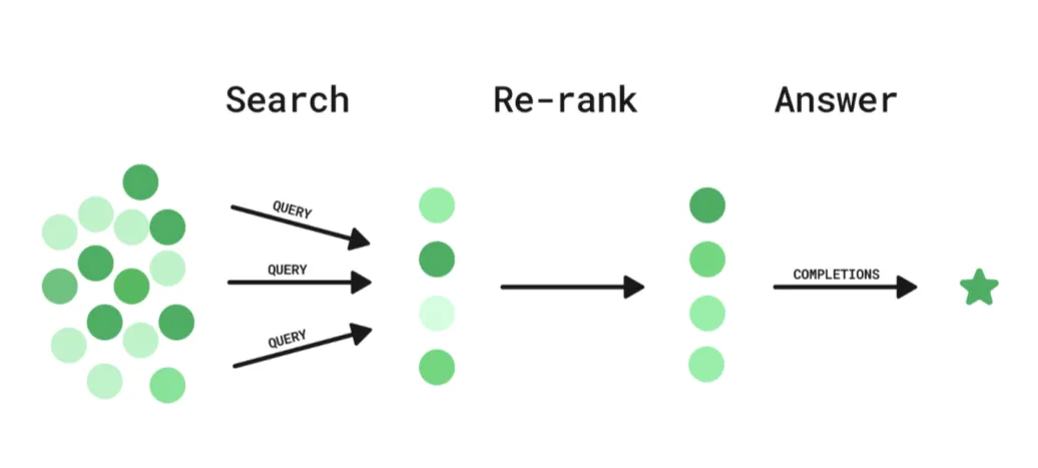
RAG检索系统的两大核心利器——Embedding模型和Rerank模型
在RAG系统中,有两个非常重要的模型一个是Embedding模型,另一个则是Rerank模型;这两个模型在RAG中扮演着重要角色。 Embedding模型的作用是把数据向量化,通过降维的方式,使得可以通过欧式距离,余弦函数等计算…...
CLion社区免费后,使用CLion开发STM32相关工具资源汇总与入门教程
Clion下载与配置 Clion推出社区免费,就是需要注册一个账号使用,大家就不用去找破解版版本了,jetbrains家的IDEA用过的都说好,这里嵌入式领域也推荐使用。 CLion官网下载地址 安装没有什么特别,下一步就好。 启动登录…...
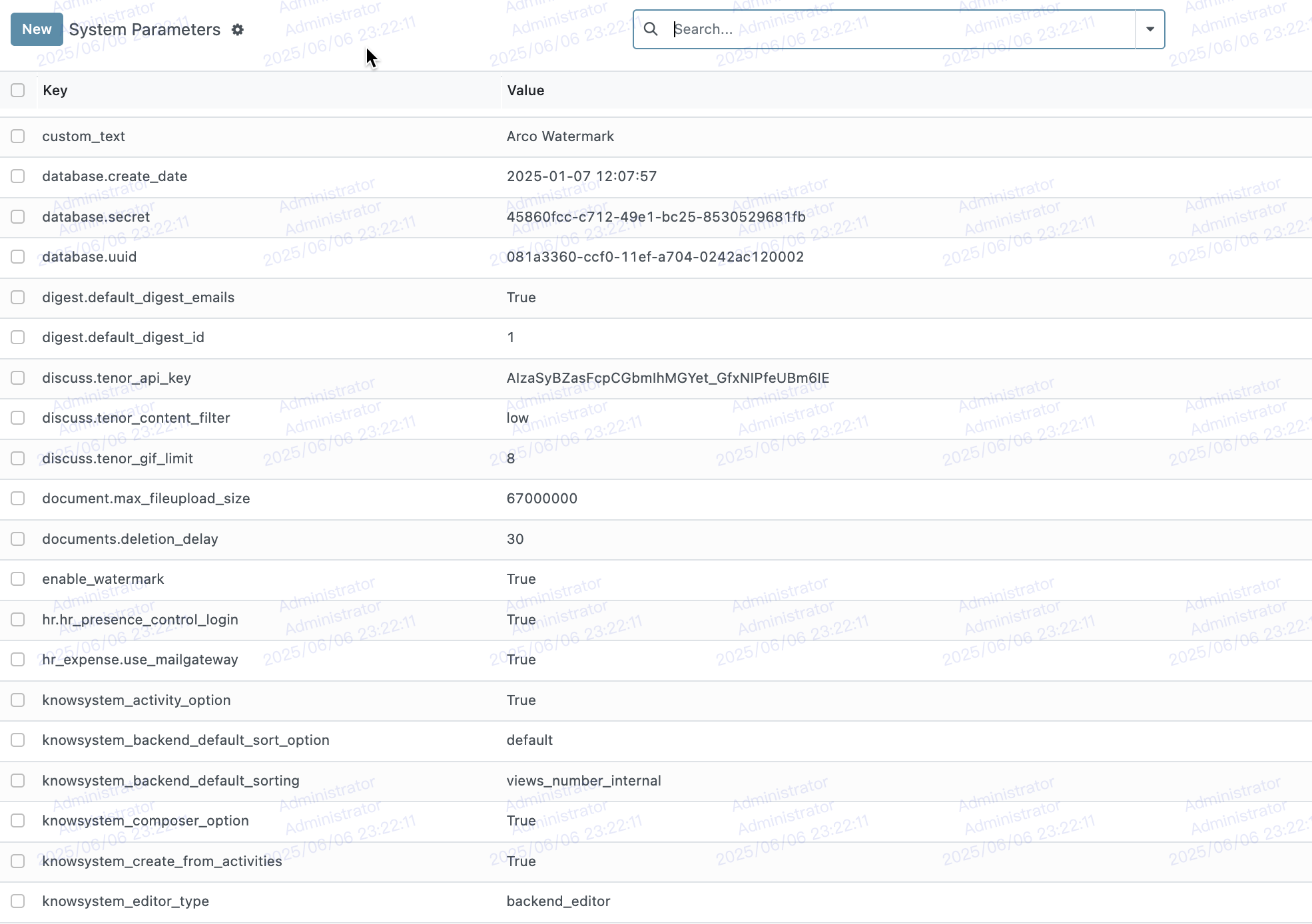
第21讲、Odoo 18 配置机制详解
Odoo 18 配置机制详解:res.config.settings 与 ir.config_parameter 原理与实战指南 在现代企业信息化系统中,灵活且可维护的系统参数配置是模块开发的核心能力之一。Odoo 作为一款高度模块化的企业管理软件,其参数配置机制主要依赖于两个关…...

LinkedList、Vector、Set
LinkedList 基本概念 LinkedList 是一个双向链表的实现类,它实现了 List、Deque、Queue 和 Cloneable 接口,底层使用双向链表结构,适合频繁插入和删除操作。 主要特点 有序,可重复。 查询速度较慢,插入/删除速度较…...

SQL 基础入门
SQL 基础入门 SQL(全称 Structured Query Language,结构化查询语言)是用于操作关系型数据库的标准语言,主要用于数据的查询、新增、修改和删除。本文面向初学者,介绍 SQL 的基础概念和核心操作。 1. 常见的 SQL 数据…...
)
GitHub 趋势日报 (2025年06月05日)
📊 由 TrendForge 系统生成 | 🌐 https://trendforge.devlive.org/ 🌐 本日报中的项目描述已自动翻译为中文 📈 今日获星趋势图 今日获星趋势图 1472 onlook 991 HowToCook 752 ChinaTextbook 649 quarkdown 451 scrapy 324 age…...

基于Flask框架的前后端分离项目开发流程是怎样的?
基于Flask框架的前后端分离项目开发流程可分为需求分析、架构设计、并行开发、集成测试和部署上线五个阶段。以下是详细步骤和技术要点: 一、需求分析与规划 1. 明确项目边界 功能范围:确定核心功能(如用户认证、数据管理、支付流程&#…...

Delphi SetFileSecurity 设置安全描述符
在Delphi中,使用Windows API函数SetFileSecurity来设置文件或目录的安全描述符时,你需要正确地构建一个安全描述符(SECURITY_DESCRIPTOR结构)。这个过程涉及到几个步骤,包括创建或修改安全描述符、设置访问控制列表&am…...
)
rec_pphgnetv2完整代码学习(二)
六、TheseusLayer PaddleOCRv5 中的 TheseusLayer 深度解析 TheseusLayer 是 PaddleOCRv5 中 rec_pphgnetv2 模型的核心网络抽象层,提供了强大的网络结构调整和特征提取能力。以下是对其代码的详细解读: 1. 整体设计思想 核心概念: 网络…...
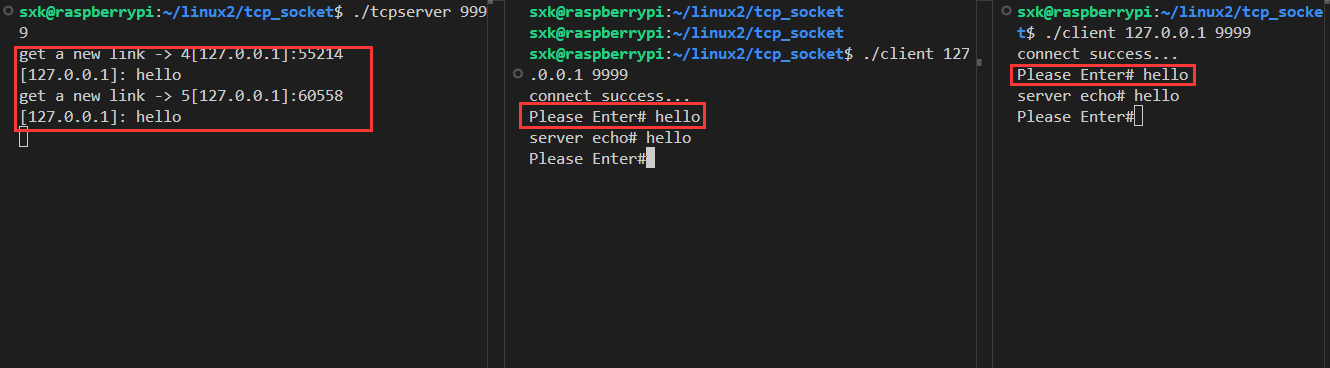
【计算机网络】Linux下简单的TCP服务器(超详细)
服务端 创建套接字 💻我们将TCP服务器封装成一个类,当我们定义出一个服务器对象后需要马上对服务器进行初始化,而初始化TCP服务器要做的第一件事就是创建套接字。 TCP服务器在调用socket函数创建套接字时,参数设置如下࿱…...

go中的接口返回设计思想
go中的接口返回设计思想 前言 在学习AI编码过程中,产生了类似以下结构的代码 : type MQClient interface {PublishMessage(queue string, message interface{}) error...... } ... type RabbitMQClient struct {conn *amqp.Connectionchannel *amqp.C…...

最新Spring Security实战教程(十七)企业级安全方案设计 - 多因素认证(MFA)实现
🌷 古之立大事者,不惟有超世之才,亦必有坚忍不拔之志 🎐 个人CSND主页——Micro麦可乐的博客 🐥《Docker实操教程》专栏以最新的Centos版本为基础进行Docker实操教程,入门到实战 🌺《RabbitMQ》…...
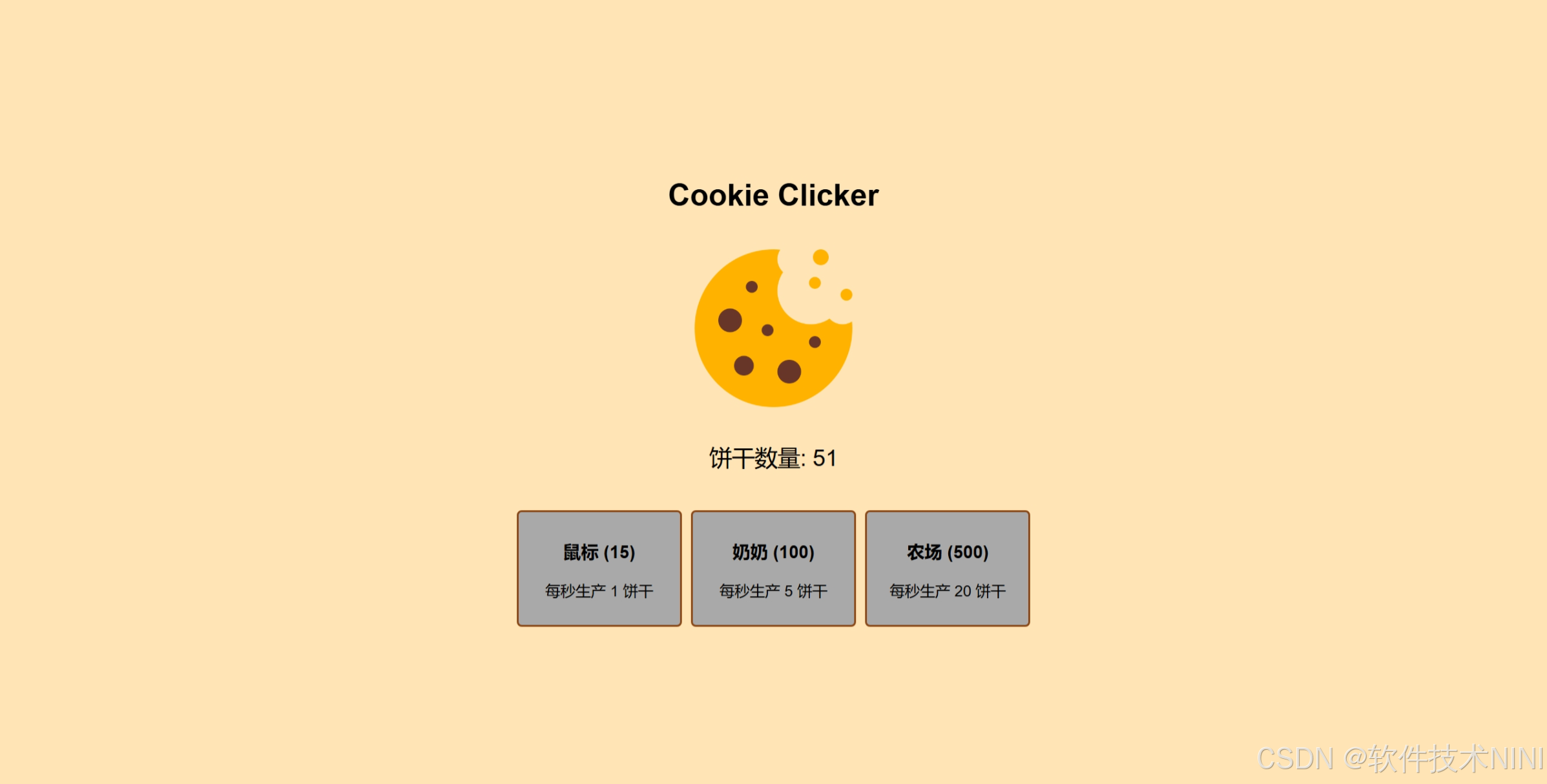
html+css+js趣味小游戏~Cookie Clicker放置休闲(附源码)
下面是一个简单的记忆卡片配对游戏的完整代码,使用HTML、CSS和JavaScript实现: html <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"wid…...

宝塔面板安装nodejs后,通过node -v获取不到版本号,报错node: command not found
如果在 宝塔面板 安装了 Node.js,但运行 node -v 或 npm -v 时提示 command not found,通常是因为 Node.js 的路径未正确添加到系统环境变量。以下是解决方法: 1. 确认 Node.js 是否安装成功 (1)检查宝塔面板的 Node.…...
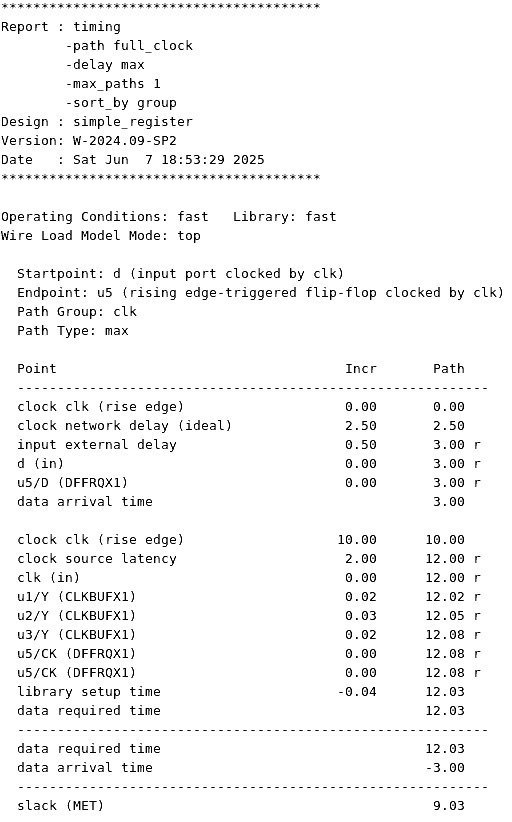
SDC命令详解:使用set_propagated_clock命令进行约束
相关阅读 SDC命令详解https://blog.csdn.net/weixin_45791458/category_12931432.html?spm1001.2014.3001.5482 目录 指定端口列表/集合 简单使用 注意事项 传播时钟是在进行了时钟树综合后,使用set_propagated_clock命令可以将一个理想时钟转换为传播时钟&#x…...

win32相关(消息Hook)
消息Hook 要想实现消息Hook需要使用到三个相关的Api SetWindowsHookEx // 设置钩子CallNextHookEx // 将钩子信息传递到当前钩子链中的下一个子程序UnhookWindowsHookEx // 卸载钩子 我们编写的消息钩子需要将设置钩子的函数写到dll里面,当钩住一个线程后ÿ…...

vue3单独封装表单校验函数
1.在页面中建一个.ts文件 import { useI18n } from /hooks/web/useI18n import { FormItemRule } from element-plusconst { t } useI18n()interface LengthRange {min: numbermax: numbermessage?: string } //必输项校验 export const useValidator () > {const requi…...
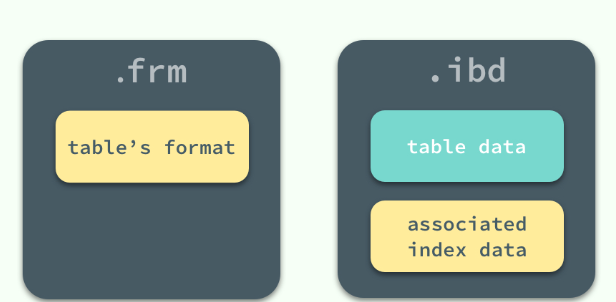
mysql 页的理解和实际分析
目录 页(Page)是 Innodb 存储引擎用于管理数据的最小磁盘单位B树的一般高度记录在页中的存储 innodb ibd文件innodb 页类型分析ibd文件查看数据表的行格式查看ibd文件 分析 ibd的第4个页:B-tree Node类型先分析File Header(38字节-描述页信息…...

分享一道力扣
刚刚笔试遇到的。好像很简单,但又不容易写的 611 有效三角形 def triangleNumber(self, nums):count 0nums.sort()for i in range(len(nums) - 2):k i 2for j in range(i 1, len(nums) - 1):if nums[i] 0:breakwhile k < len(nums) and nums[i] nums[j] &g…...

青少年编程与数学 01-011 系统软件简介 06 Android操作系统
青少年编程与数学 01-011 系统软件简介 06 Android操作系统 一、历史发展二、核心架构1. Linux 内核层 (Linux Kernel)2. 硬件抽象层 (Hardware Abstraction Layer - HAL)3. Native 层 (Native Libraries & Android Runtime)4. Java API 框架层 (Java Framework Layer)5. 应…...