Windows 下搭建 Zephyr 开发环境
1. 系统要求
- 操作系统:Windows 10/11(64位)
- 磁盘空间:至少 8GB 可用空间(Zephyr 及其工具链较大)
- 权限:管理员权限(部分工具需要)
2. 安装必要工具
winget安装依赖工具(Windows Package Manager)
以 管理员身份 打开 cmd.exe或者PowerShell,运行:
winget install Kitware.CMake Ninja-build.Ninja oss-winget.gperf python Git.Git oss-winget.dtc wget 7zip.7zipwindows安装包下载临时目录
C:\Users\Administrator\AppData\Local\Temp\WinGet安装日志:
Microsoft Windows [版本 10.0.26100.4061]
(c) Microsoft Corporation。保留所有权利。C:\Users\Administrator>winget install Kitware.CMake Ninja-build.Ninja oss-winget.gperf python Git.Git oss-winget.dtc wget 7zip.7zip
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: Kitware.CMake
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: Ninja-build.Ninja
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: oss-winget.gperf
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: python
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: Git.Git
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: oss-winget.dtc
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: wget
找到已安装的现有包。正在尝试升级已安装的包...
找不到可用的升级。
配置的源中没有可用的较新的包版本。
已安装程序包: 7zip.7zip3. 获取Zephyr和安装Python依赖项
1. 使用普通用户打开cmd.exe or PowerShell 终端
2. 创建新的虚拟环境
cd D:\workspace\
mkdir zephyrproject
python -m venv zephyrproject\.venv3. 激活虚拟环境
zephyrproject\.venv\Scripts\activate.bat4. 安装west
pip install west -i https://pypi.mirrors.ustc.edu.cn/simple/5. 获取Zephyr源码
west init zephyr-project
cd zephyr-project
west updatewest update日志
(.venv) D:\workspace\zephyrproject\zephyr-project>west update
=== updating acpica (modules/lib/acpica):
HEAD is now at 8d24867bc Merge pull request #5 from dcpleung/kernel/mm_z_phys_map_unmap_rename
=== updating cmsis (modules/hal/cmsis):
HEAD is now at d1b8b20 Backport CMSIS_6#102 to CMSIS 5.9.0
=== updating cmsis-dsp (modules/lib/cmsis-dsp):
HEAD is now at d80a49b2 do not generate warnings when scalar functions are used with MVE
=== updating cmsis-nn (modules/lib/cmsis-nn):
HEAD is now at e9328d6 manifest: zephyr module file
=== updating cmsis_6 (modules/hal/cmsis_6):
HEAD is now at 6dd50439 cmsis_6: Integrate with zephyr build system
=== updating edtt (tools/edtt):
HEAD is now at b9ca3c7 Fix for for python >= 3.11
=== updating fatfs (modules/fs/fatfs):
HEAD is now at 16245c7 fs: Update driver to version 0.15a
=== updating hal_adi (modules/hal/adi):
HEAD is now at f8f6547 chore(PeriphDrivers): Replace pow() with left shift in UART drivers
=== updating hal_afbr (modules/hal/afbr):
HEAD is now at 4e1eea7 general: MAKE_VERSION is defined in other modules so let's change it
=== updating hal_ambiq (modules/hal/ambiq):
HEAD is now at f46941f hal: uart: minor change for uart dma support
=== updating hal_atmel (modules/hal/atmel):
HEAD is now at ca7e4c6 sam3x: spi: missing adc macro
=== updating hal_bouffalolab (modules/hal/bouffalolab):
HEAD is now at 5811738 bflb: add register files for bl60x
=== updating hal_espressif (modules/hal/espressif):
HEAD is now at 1f1d6937f8 hal: esp32c6: Fix sleep routine
=== updating hal_ethos_u (modules/hal/ethos_u):
HEAD is now at 50ddffc Cache optimizations
=== updating hal_gigadevice (modules/hal/gigadevice):
HEAD is now at 2994b7d README.md: add pllmf and pack exception for gd32a50x
=== updating hal_infineon (modules/hal/infineon):
HEAD is now at 0fe4f3a hal: infineon: Modifications required to support XMC7200
=== updating hal_intel (modules/hal/intel):
HEAD is now at 0447cd2 Update pm_regs.h
=== updating hal_microchip (modules/hal/microchip):
HEAD is now at 4b74f40 hal: microchip: sam: Update some register definitions for FLEXCOM USART
=== updating hal_nordic (modules/hal/nordic):
HEAD is now at 4eafaa4 nrfs: usb vbus enable/disable: expand usb service
=== updating hal_nuvoton (modules/hal/nuvoton):
HEAD is now at be1042d hal:nuvoton:m55m1: support emac
=== updating hal_nxp (modules/hal/nxp):
HEAD is now at e0b43431 dts: nxp: nxp_imx: update the pinctrl dtsi for mimx9131cvvxj
=== updating hal_openisa (modules/hal/openisa):
HEAD is now at eabd530 fix-double-promotion in fsl_xcvr_trim
=== updating hal_quicklogic (modules/hal/quicklogic):
HEAD is now at bad8944 HAL: eoss3_dev: add missing `__cplusplus` handling
=== updating hal_renesas (modules/hal/renesas):
HEAD is now at 9d68ee7 portable: rp_crc: add runtime reconfigure for CRC
=== updating hal_rpi_pico (modules/hal/rpi_pico):
HEAD is now at 7b57b24 Merge pull request #8 from ajf58/merge-2.1.0
=== updating hal_silabs (modules/hal/silabs):
HEAD is now at a0095a7 wiseconnect: Apply 802.11ax config only in client mode
=== updating hal_st (modules/hal/st):
HEAD is now at 9f81b44 sensor/stmemsc: Align stmemsc i/f to v2.9.1
=== updating hal_stm32 (modules/hal/stm32):
HEAD is now at 5cbc642b dts: New batch with HSPI signals
=== updating hal_tdk (modules/hal/tdk):
HEAD is now at 6727477 Merge pull request #8 from tdk-invn-oss/main
=== updating hal_telink (modules/hal/telink):
HEAD is now at 4226c7f drivers: Disable BLE support
=== updating hal_ti (modules/hal/ti):
HEAD is now at bc8e7b9 hal: ti: mspm0: Add a support for MSPM0
=== updating hal_wch (modules/hal/wch):
HEAD is now at 6dd3137 hal: wch: update the HAL to pull in CH32V00x support
=== updating hal_wurthelektronik (modules/hal/wurthelektronik):
HEAD is now at e3e2797 Remove preprocessor warnings for not enabling float
=== updating hal_xtensa (modules/hal/xtensa):
HEAD is now at b38620c zephyr: Add SoC overlay for i.MXRT700 HiFi1 DSP
=== updating hostap (modules/lib/hostap):
HEAD is now at 8412f4b23 [noup] zephyr: remove zephyr wpas monitor socket pair
=== updating liblc3 (modules/lib/liblc3):
HEAD is now at 48bbd3e Rename lc3 python package to lc3py, and bump version to 1.1.2
=== updating libmctp (modules/lib/libmctp):
HEAD is now at b97860e build MCTP zephyr library only when CONFIG_MCTP is enabled
=== updating libmetal (modules/hal/libmetal):
HEAD is now at 14f5195 lib: update libmetal to SHA 9a21915a5f8f
=== updating littlefs (modules/fs/littlefs):
HEAD is now at 8f5ca34 Merge pull request #19 from mkaranki/update-to-v2.10.2
=== updating loramac-node (modules/lib/loramac-node):
HEAD is now at fb00b383 zephyr: configure FragDecoder using Kconfig
=== updating lvgl (modules/lib/gui/lvgl):
HEAD is now at 1ed1ddd88 docs(Alif): add docs for Alif chip vendor (#7622)
=== updating mbedtls (modules/crypto/mbedtls):
HEAD is now at 5f8899343 Merge pull request #70 from tomi-font/bump_to_3.6.3
=== updating mcuboot (bootloader/mcuboot):
HEAD is now at 990b1fcb docs: release-notes: Add additional fixes
=== updating mipi-sys-t (modules/debug/mipi-sys-t):
HEAD is now at 33e5c23 Fix for warning of potential error using = instead of ==
=== updating net-tools (tools/net-tools):
HEAD is now at 986bfeb Replace native_posix with native_sim
=== updating nrf_hw_models (modules/bsim_hw_models/nrf_hw_models):
HEAD is now at c6296f6 52/53 CCM: Remove warning on TASK_STOP
=== updating nrf_wifi (modules/lib/nrf_wifi):
HEAD is now at 0cd7f28 Fix delayed stats event handling
=== updating open-amp (modules/lib/open-amp):
HEAD is now at f7f4d08 lib: update open-amp lib to SHA 9a21915a5f8f
=== updating openthread (modules/lib/openthread):
HEAD is now at 3ae741f95 [instance] fix index computation in multi-instances context (#11099)
=== updating percepio (modules/debug/percepio):
HEAD is now at 49e6dc2 Merge branch 'main' into zephyr
=== updating picolibc (modules/lib/picolibc):
HEAD is now at 560946f26 Delete obsoleted _syslist.h
=== updating segger (modules/debug/segger):
HEAD is now at cf56b1d readme: Add readme
=== updating tinycrypt (modules/crypto/tinycrypt):
HEAD is now at 1012a3e Fix warnings reported by UBSAN
=== updating trusted-firmware-a (modules/tee/tf-a/trusted-firmware-a):
HEAD is now at 713ffbf96 Merge pull request #4 from ceolin/v2.10.4
=== updating trusted-firmware-m (modules/tee/tf-m/trusted-firmware-m):
HEAD is now at c150f4885 platform: ext: adi: pull in update from TF-M main
=== updating uoscore-uedhoc (modules/lib/uoscore-uedhoc):
HEAD is now at 54abc10 Merge pull request #5 from rlubos/upmerge-02-2025
=== updating zcbor (modules/lib/zcbor):
HEAD is now at 9b07780 Update version to 0.9.1
6. Export Zephyr package
west zephyr-export7. 安装west python依赖包
# 使用国外镜像源比较慢
west packages pip --install注意:永久切换pip使用国内镜像源
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip config set global.trusted-host pypi.tuna.tsinghua.edu.cnpip config list# 恢复默认配置
pip config unset global.index-url
pip config unset global.trusted-host常见镜像源地址
| 镜像名称 | URL |
| 清华大学 |
|
| 阿里云 |
|
| 腾讯云 |
|
| 华为云 |
|
4. 安装 Zephyr SDK
Zephyr SDK 包含编译工具链(如 GCC ARM 工具链)。
(1) 下载 SDK
从 Zephyr SDK 官方页面 下载最新版(如 zephyr-sdk-0.17.1_windows-x86_64.7z)。
(2) 解压并安装
1. 解压到 D:\workspace\zephyrproject\zephyr-sdk\zephyr-sdk-0.17.1(路径不要有空格或中文)。
以管理员身份运行解压目录中的 setup.cmd:
cd D:\workspace\zephyrproject\zephyr-sdk\zephyr-sdk-0.17.1
.\setup.cmd2. 按提示输入 Y 同意安装。
验证安装
(1) 检查环境
west --version
cmake --version
ninja --version
python --version# 所有命令应正常输出版本号
(.venv) D:\workspace\zephyrproject\zephyr-project\zephyr>west --version
West version: v1.4.0(.venv) D:\workspace\zephyrproject\zephyr-project\zephyr>cmake --version
cmake version 4.0.2CMake suite maintained and supported by Kitware (kitware.com/cmake).(.venv) D:\workspace\zephyrproject\zephyr-project\zephyr>ninja --version
1.12.1(.venv) D:\workspace\zephyrproject\zephyr-project\zephyr>python --version
Python 3.10.11(2) 编译示例项目
cd D:\workspace\zephyrproject\zephyr-project\zephyr
west build -b blackpill_f401cc samples/hello_world-b blackpill_f401cc:指定 Black Pill STM32F401CC 开发板- 首次编译会下载工具链和依赖,耗时较长。
(3) 烧录与调试
west flash --runner blackmagicprobe --gdb-serial "\\.\COM12"
west debug --runner blackmagicprobe --gdb-serial "\\.\COM12"
west attach --runner blackmagicprobe --gdb-serial "\\.\COM12"west flash --runner blackmagicprobe --gdb-serial "\\.\COM12"
-- west flash: rebuilding
ninja: no work to do.
-- west flash: using runner blackmagicprobe
-- runners.blackmagicprobe: using GDB serial: \\.\COM12
Remote debugging using \\.\COM12
Target voltage: 2.51V
Available Targets:
No. Att Driver
1 STM32F401E M4
Attaching to Remote target
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0x08002d22 in ?? ()
Loading section rom_start, size 0x194 lma 0x8000000
Loading section text, size 0x367c lma 0x8000194
Loading section .ARM.exidx, size 0x8 lma 0x8003810
Loading section initlevel, size 0x80 lma 0x8003818
Loading section device_area, size 0x180 lma 0x8003898
Loading section sw_isr_table, size 0x2a8 lma 0x8003a18
Loading section gpio_driver_api_area, size 0x24 lma 0x8003cc0
Loading section reset_driver_api_area, size 0x10 lma 0x8003ce4
Loading section clock_control_driver_api_area, size 0x1c lma 0x8003cf4
Loading section uart_driver_api_area, size 0x4c lma 0x8003d10
Loading section rodata, size 0x2d4 lma 0x8003d5c
Loading section datas, size 0x4c lma 0x8004030
Loading section device_states, size 0x18 lma 0x800407c
Loading section .last_section, size 0x4 lma 0x8004094
Start address 0x080008c4, load size 16536
Transfer rate: 23 KB/sec, 590 bytes/write.
[Inferior 1 (Remote target) killed]west debug --runner blackmagicprobe --gdb-serial "\\.\COM12"
-- west debug: rebuilding
ninja: no work to do.
-- west debug: using runner blackmagicprobe
-- runners.blackmagicprobe: using GDB serial: \\.\COM12
GNU gdb (Zephyr SDK 0.17.1) 12.1
Copyright (C) 2022 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Type "show copying" and "show warranty" for details.
This GDB was configured as "--host=x86_64-host_w64-mingw32 --target=arm-zephyr-eabi".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<https://github.com/zephyrproject-rtos/sdk-ng/issues>.
Find the GDB manual and other documentation resources online at:<http://www.gnu.org/software/gdb/documentation/>.For help, type "help".
Type "apropos word" to search for commands related to "word".
Remote debugging using \\.\COM12
Target voltage: 2.44V
Available Targets:
No. Att Driver1 STM32F401E M4
Attaching to Remote target
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0x08002d22 in ?? ()
Reading symbols from D:/workspace/zephyrproject/zephyr-project/zephyr/build/zephyr/zephyr.elf...
Loading section rom_start, size 0x194 lma 0x8000000
Loading section text, size 0x367c lma 0x8000194
Loading section .ARM.exidx, size 0x8 lma 0x8003810
Loading section initlevel, size 0x80 lma 0x8003818
Loading section device_area, size 0x180 lma 0x8003898
Loading section sw_isr_table, size 0x2a8 lma 0x8003a18
Loading section gpio_driver_api_area, size 0x24 lma 0x8003cc0
Loading section reset_driver_api_area, size 0x10 lma 0x8003ce4
Loading section clock_control_driver_api_area, size 0x1c lma 0x8003cf4
Loading section uart_driver_api_area, size 0x4c lma 0x8003d10
Loading section rodata, size 0x2d4 lma 0x8003d5c
--Type <RET> for more, q to quit, c to continue without paging--
Loading section datas, size 0x4c lma 0x8004030
Loading section device_states, size 0x18 lma 0x800407c
Loading section .last_section, size 0x4 lma 0x8004094
Start address 0x080008c4, load size 16536
Transfer rate: 6 KB/sec, 590 bytes/write.west attach --runner blackmagicprobe --gdb-serial "\\.\COM12"
-- west attach: rebuilding
ninja: no work to do.
-- west attach: using runner blackmagicprobe
-- runners.blackmagicprobe: using GDB serial: \\.\COM12
GNU gdb (Zephyr SDK 0.17.1) 12.1
Copyright (C) 2022 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Type "show copying" and "show warranty" for details.
This GDB was configured as "--host=x86_64-host_w64-mingw32 --target=arm-zephyr-eabi".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<https://github.com/zephyrproject-rtos/sdk-ng/issues>.
Find the GDB manual and other documentation resources online at:<http://www.gnu.org/software/gdb/documentation/>.For help, type "help".
Type "apropos word" to search for commands related to "word".
Remote debugging using \\.\COM12
Target voltage: 2.53V
Available Targets:
No. Att Driver1 STM32F401E M4
Attaching to Remote target
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0x08002d22 in ?? ()
Reading symbols from D:/workspace/zephyrproject/zephyr-project/zephyr/build/zephyr/zephyr.elf...
(gdb)如果看到 Hello World! zephyr 输出,说明环境搭建成功!
这里主要使用的是开源调试器Black Magic Debug,Black Magic Debug自带Debug口和串口,使用windows命令行请注意:
COM 端口号过高(> COM9)
- 问题原因:Windows 对
COM端口号的命名规则有特殊限制:
-
COM1~COM9是传统端口,可直接以COMx形式访问。COM10及以上的端口属于扩展端口,需通过\\.\COMx格式访问(例如\\.\COM12)。
相关文章:

Windows 下搭建 Zephyr 开发环境
1. 系统要求 操作系统:Windows 10/11(64位)磁盘空间:至少 8GB 可用空间(Zephyr 及其工具链较大)权限:管理员权限(部分工具需要) 2. 安装必要工具 winget安装依赖工具&am…...

蓝桥杯单片机之通过实现同一个按键的短按与长按功能
实现按键的短按与长按的不同功能 问题分析 对于按键短按,通常是松开后实现其功能,而不会出现按下就进行后续的操作;而对于按键长按,则不太一样,按键长按可能分为两种情况,一是长按n秒后实现后续功能&…...
)
如何用 pnpm patch 给 element-plus 打补丁修复线上 bug(以 2.4.4 修复 PR#15197 为例)
背景 在实际项目开发中,依赖的三方库(如 element-plus)难免会遇到 bug。有时候官方虽然已经修复,但新版本升级成本高,或者有兼容性风险。这时,给依赖打补丁是最优雅的解决方案之一。 本文以 element-plus…...

PCB特种工艺应用扩展:厚铜、高频与软硬结合板
新能源汽车与消费电子驱动PCB特种工艺创新,厚铜板降阻30%,软硬结合板渗透率年增15%。 1. 厚铜板:新能源高压平台核心 技术突破:猎板PCB量产10oz厚铜板(传统为3oz),载流能力提升200%,…...

ClusterRole 和 ClusterRoleBinding 的关系及使用
ClusterRole 和 ClusterRoleBinding 是 Kubernetes 中用于控制集群范围权限的两个重要资源,它们共同构成了 Kubernetes RBAC (基于角色的访问控制) 系统的核心部分。 两者的关系 ClusterRole 定义了一组权限规则,指定了可以对哪些资源执行哪些操作 Clu…...

C++ const 修饰符深入浅出详解
C const 修饰符深入浅出详解 📅 更新时间:2025年6月6日 🏷️ 标签:C | const关键字 | 常量 | 多文件编程 | 现代C 文章目录 前言🌟 一、const 是什么?为什么要用?示例✅ const 的四大好处 &…...

Python 数据类型转换、编码处理与文件操作实战指南
一、数据类型转换 int (整型) 与 str (字符串) 之间: str 转 int:int("123") (要求字符串内容必须是数字)。 int 转 str:str(123)。 规则: 使用目标类型的英文名加括号包裹原数据即可。 list (列表) 与 tuple (元组…...
Readest(电子书阅读器) v0.9.53
Readest 是一款开源电子书阅读器,专为沉浸式和深度阅读体验而设计。它是对Foliate的现代重写,利用Next. js 15和Tauri v2在macOS、Windows、Linux和Web上提供无缝的跨平台体验,并即将支持移动平台。 软件特色 多格式支持 支持EPUB、MOBI、K…...
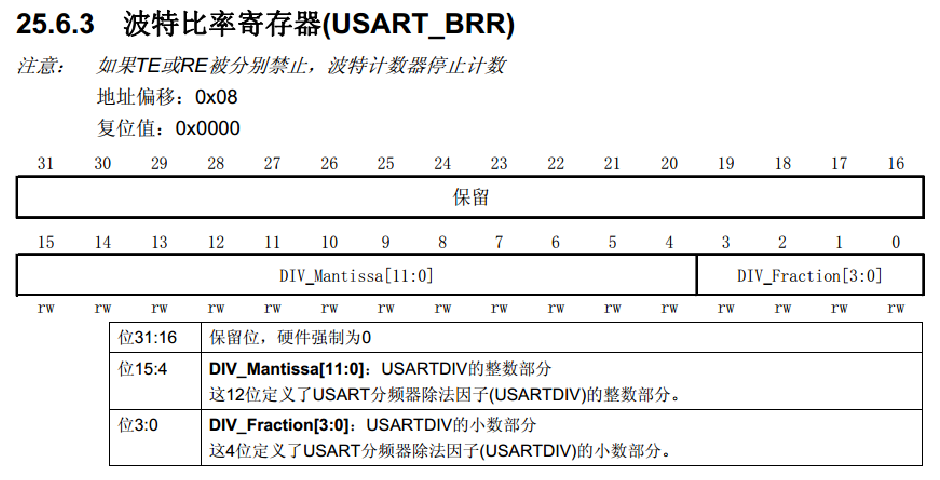
USART 串口通信全解析:原理、结构与代码实战
文章目录 USARTUSART简介USART框图USART基本结构数据帧起始位侦测数据采样波特率发生器串口发送数据 主要代码串口接收数据与发送数据主要代码 USART USART简介 一、USART 的全称与基本定义 英文全称 USART:Universal Synchronous Asynchronous Receiver Transmi…...

Matlab | matlab中的图像处理详解
MATLAB 图像处理详解 这里写目录标题图像处理 MATLAB 图像处理详解一、图像基础操作1. 图像读写与显示2. 图像信息获取3. 图像类型转换二、图像增强技术1. 对比度调整2. 去噪处理3. 锐化处理三、图像变换1. 几何变换2. 频域变换四、图像分割1. 阈值分割2. 边缘检测3. 区域分割五…...
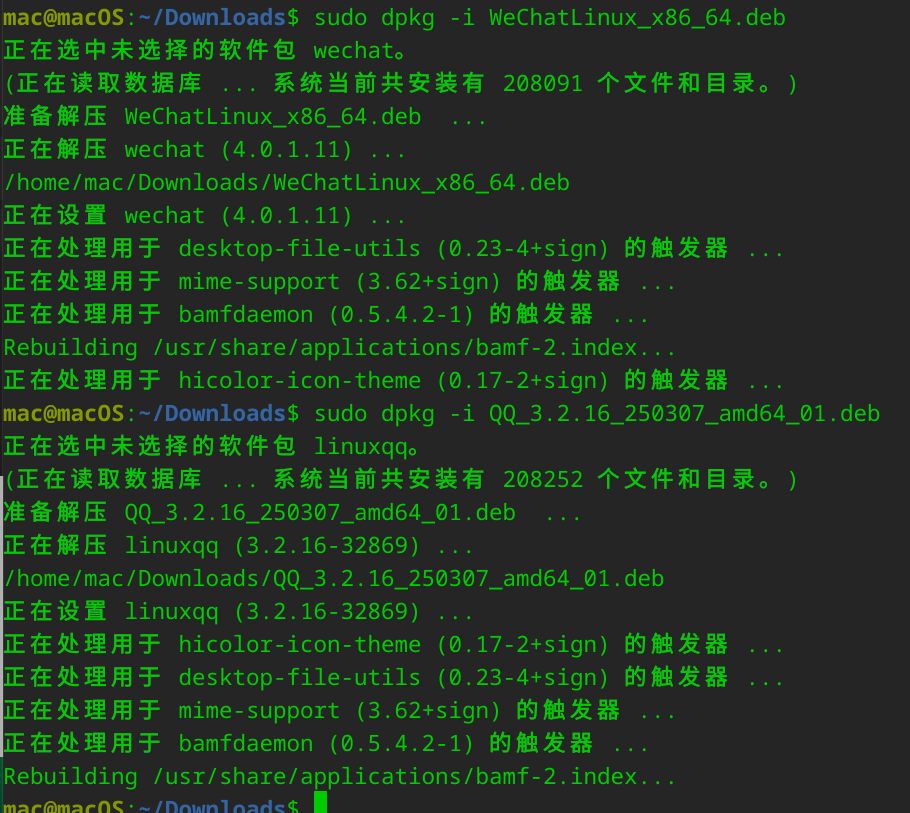
UOS无法安装deb软件包
UOS无法安装deb软件包 问题描述解决办法: 关闭安全中心的应用隔离结果验证 问题描述 UOS安装Linux微信的deb包时,无法正常安装 解决办法: 关闭安全中心的应用隔离 要关闭-安全中心的应用隔离后才可以正常软件和运行。 应用安全----》 允许任意应用。 结果验证 # …...
VUE前端实现自动打包成压缩文件
VUE前端实现自动打包成压缩文件 背景思路实现打包代码实现 尾巴 背景 做前端开发的兄弟们都经历过每次开发完成之后发包需要进行打包,然后将打包文件压缩。每次打好包了都得手动压缩一遍,就有点繁琐。今天我们就使用一种命令行自动压缩的方法࿰…...

2025政务服务便民热线创新发展会议顺利召开,张晨博士受邀分享
5月28日,由新华社中国经济信息社、新华社广东分社联合主办的2025政务服务便民热线创新发展暨“人工智能热线”会议在广州举行。会议围绕“人工智能与新质热线”主题,邀请全国的12345政务服务便民热线主管部门负责人、省市热线负责人和专家学者࿰…...
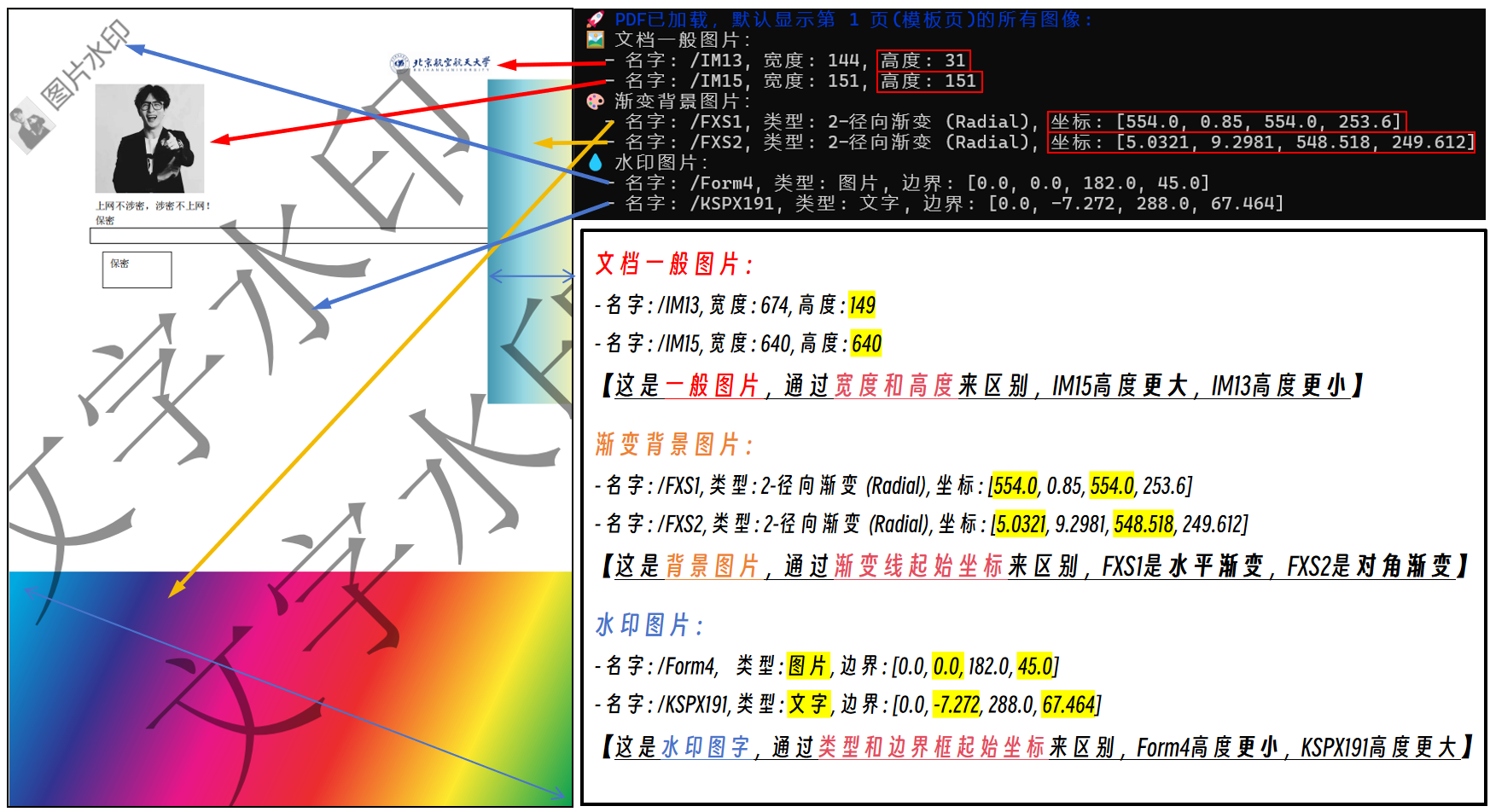
【PDF PicKiller】PDF批量删除固定位置图片工具,默认解密,可去一般图、背景图、水印图!
PDF批量删除固定位置图片工具 PDF PicKiller <center>PDF PicKiller [Download](https://github.com/Peaceful-World-X/PDF-PicKiller)🤩 工具介绍🥳 主要功能🤪 软件使用🤪 参数解释🤪 关键代码🤩 项…...

SpringAI Alibaba实战文生图
1️⃣ 前置准备:搭建开发环境与服务配置🚀 🔧 1.1 环境要求 JDK 17(推荐 JDK 21)、Spring Boot 3.x(本案例使用 3.3.4)、阿里云百炼大模型服务 API Key。需在阿里云控制台完成服务开通并获取有…...
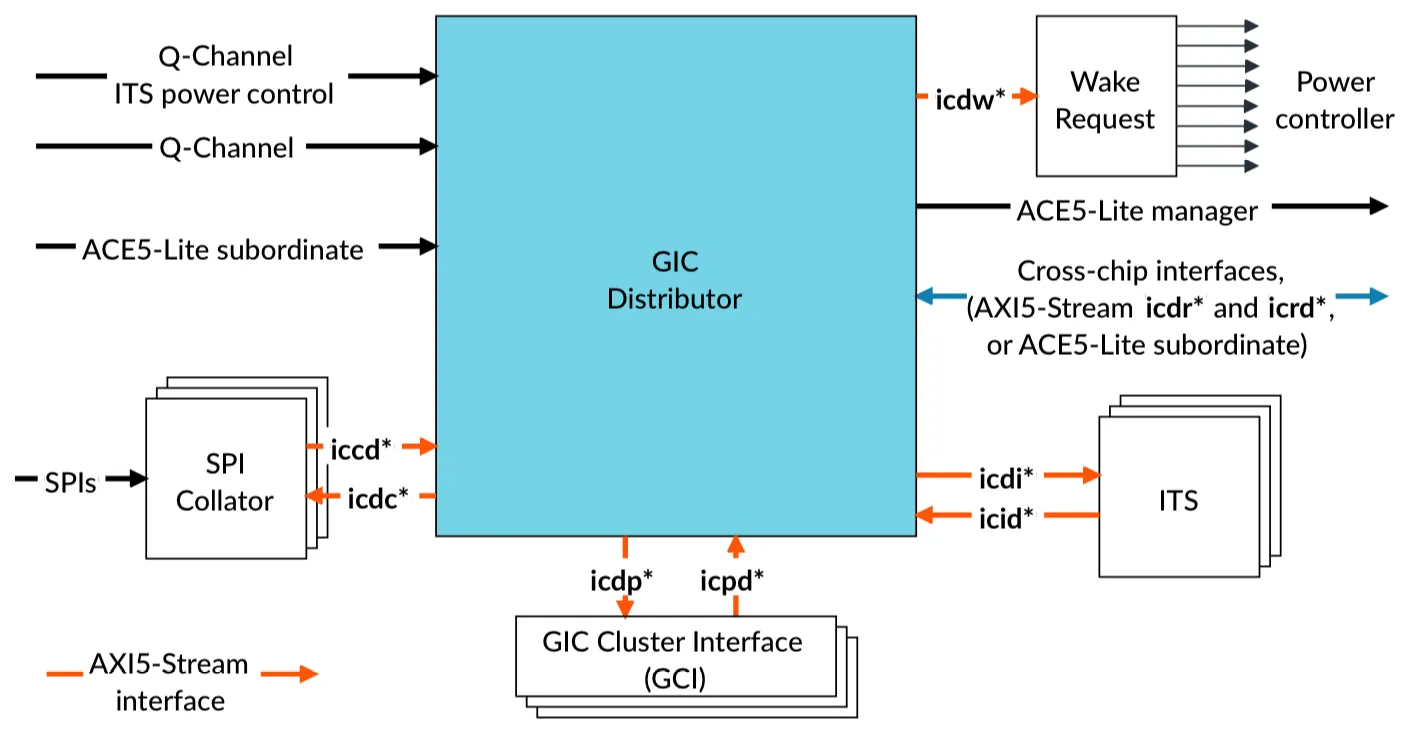
GIC700组件
GIC700包含了几个重要的组件,它们使用一个内部的GIC互联,用于在不同的组件之间使用AXI5-Stream接口进行路由。 1. Distributor(GICD) gicd是GIC700中所有组件之间的主要通信节点。它作为SPI的管理者以及维护LPI的cache,并且与其它chip上的GIC700组件进行通信。当支持GIC…...
)
几种简单的排序算法(C语言)
目录 1 简介 2 冒泡排序 2.1 基本思路 2.2 代码实现 3 选择排序 3.1 基本思路 3.2 代码实现 4 插入排序 4.1 基本思路 4.2 代码实现 5 快速排序 5.1 基本思路 5.2 代码实现 6 归并排序 6.1 基本思路 6.2 代码实现 7 基数排序 7.1 基本思路 7.2 代码实现 8 …...

RTOS学习之重难点
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...
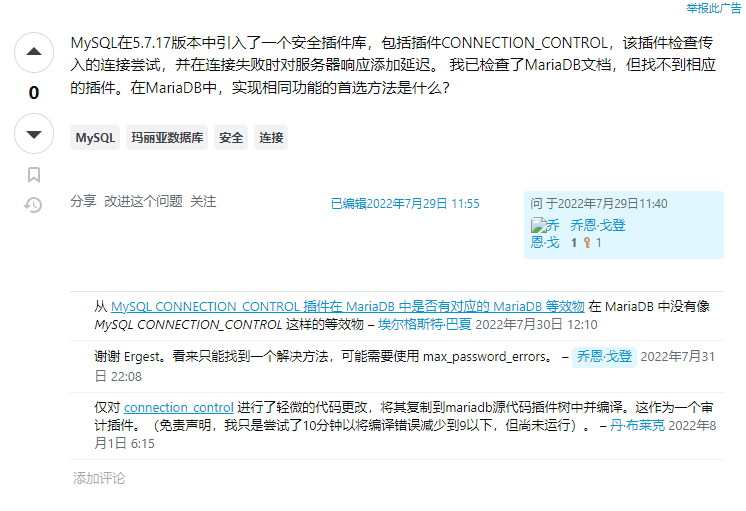
有没有 MariaDB 5.5.56 对应 MySQL CONNECTION_CONTROL 插件
有没有 MariaDB 对应 MySQL CONNECTION_CONTROL 插件 背景 写这篇文章的目的是因为昨晚半夜突然被call起来,有一套系统的mysql数据库启动失败了。尝试了重启服务器也不行。让我协助排查一下问题出在哪。 分析过程 一开始拿到服务器IP地址,就去数据库…...

setting up Activiti BPMN Workflow Engine with Spring Boot
spring.activiti.database-schema-update: true Controls how Activiti handles its database tables on startup. Options: true – Default. Creates or updates tables automatically if missing. ✅ Good for development. false – Disables auto-update. Throws an err…...
)
使用 C/C++ 和 OpenCV 提取图像的感兴趣区域 (ROI)
使用 C/C 和 OpenCV 提取图像的感兴趣区域 (ROI) 在计算机视觉中,感兴趣区域 (Region of Interest, ROI) 是指从图像中选择的一个特定区域,我们希望对其进行进一步的处理或分析。例如,在人脸识别中,ROI 就是包含人脸的矩形框。Op…...
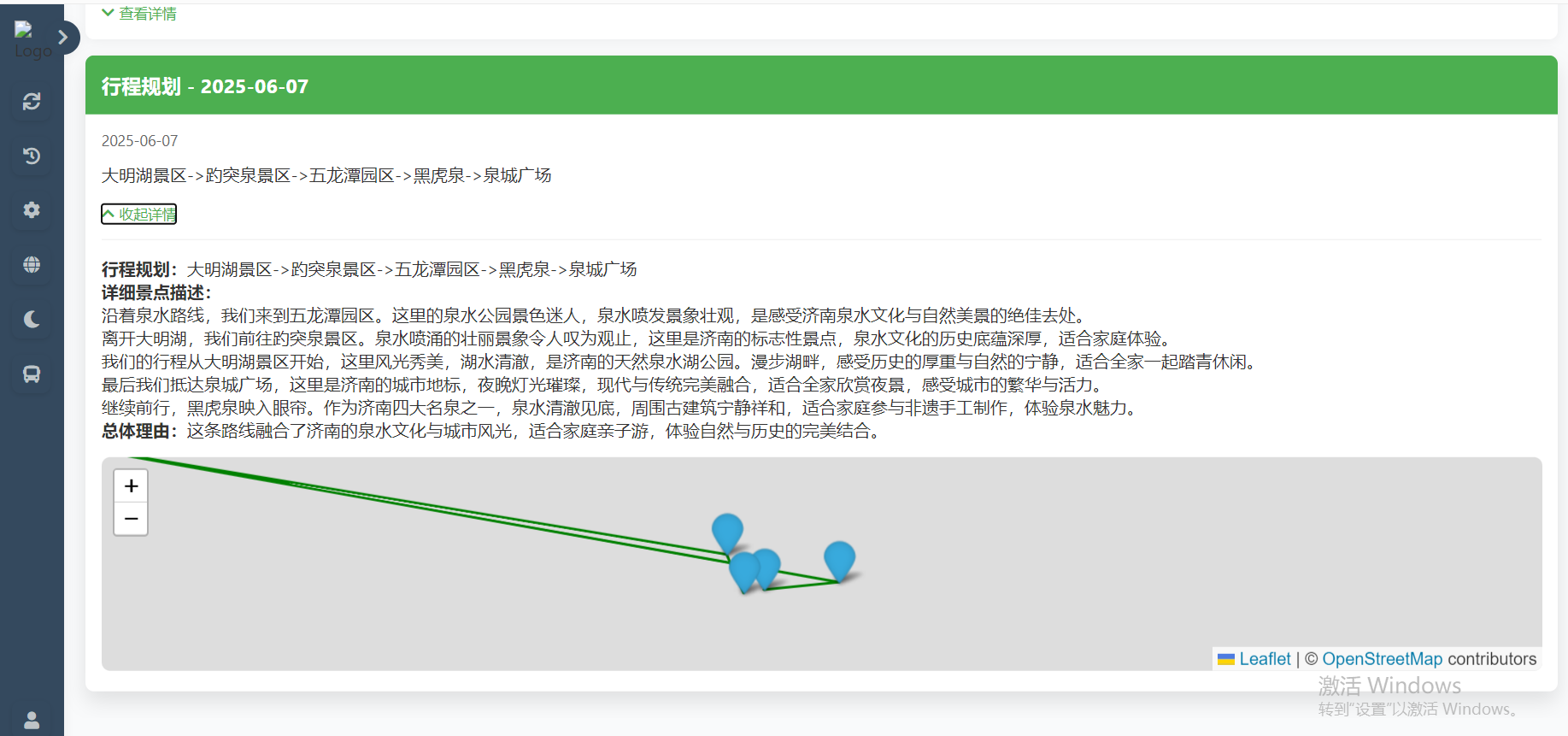
TripGenie:畅游济南旅行规划助手:个人工作纪实(二十二)
这周,我进行了历史记录的设计与制作,我对于每一个用户与智能体交互得出的历史行程的数据进行了存储与可视化展示。 首先,我设置了一个csv文件存储每一个得出的行程规划,注意这里的地图我设置了一个全路径进行存储,这样…...
如何用AI高效运营1000+Tiktok矩阵账号
在当今数字化的时代,Tiktok 矩阵账号运营成为了众多企业和个人追求流量与变现的重要手段。然而,面对众多的账号管理,如何高效运营成为了关键。此时,AI 工具的出现为我们提供了强有力的支持。 一、Tiktok 矩阵账号的重要性 Tiktok…...

杭州瑞盟 MS35774/MS35774A 低噪声256细分微步进电机驱动,用于空调风门电机驱动,香薰电机驱动
杭州瑞盟 MS35774/MS35774A 低噪声256细分微步进电机驱动,用于空调风门电机驱动,香薰电机驱动 简述 MS35774/MS35774A 是一款高精度、低噪声的两相步进 电机驱动芯片,芯片内置功率 MOSFET ,长时间工作的平均电 流可以达到 1…...

【论文解读】Toolformer: 语言模型自学使用工具
1st author: Timo Schick - Google Scholar paper: Toolformer: Language Models Can Teach Themselves to Use Tools | OpenReview NeurIPS 2023 oral code: lucidrains/toolformer-pytorch: Implementation of Toolformer, Language Models That Can Use Tools, by…...
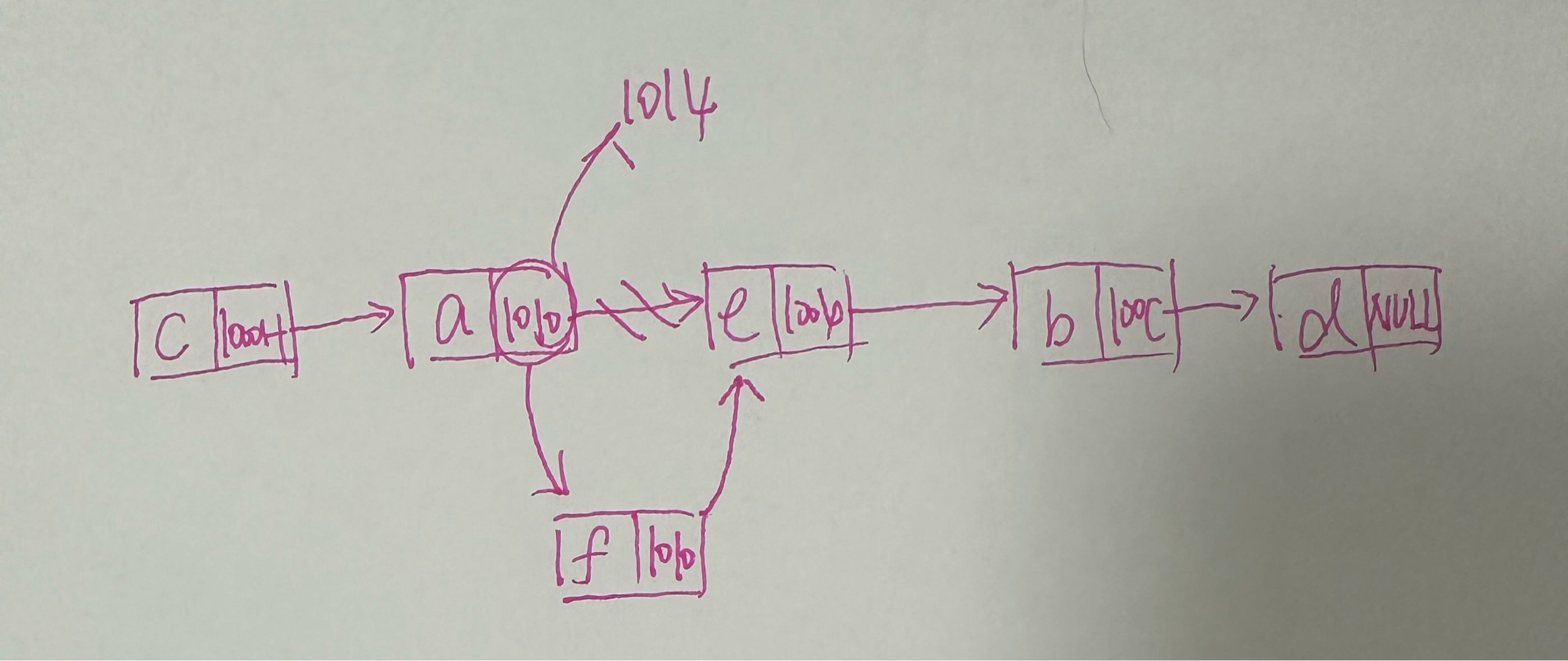
408第一季 - 数据结构 - 线性表II
链表 头节点始终指向第一个 头节点的好处: 第一个好处 这里L是头节点 可以发现,删除第一个也可以统一了 第二个好处 这是无头节点,空和非空指向的不一样 然后有头节点就可以统一了! 双链表 插入 第一步要在第四步之前&…...

网络通讯知识——通讯分层介绍,gRPC,RabbitMQ分层
网络通讯分层 网络通讯分层是为了将复杂的网络通信问题分解为多个独立、可管理的层次,每个层次专注于特定功能。目前主流的分层模型包括OSI七层模型和TCP/IP四层(或五层)模型,以下是详细解析: 一、OSI七层模型&#…...

Linux与Windows切换使用Obsidian,出现 unexplained changes 问题的解决
如果你的Obsidian文档在Linux与Windows间来回切换,可能会涉及到文件的保存换行符问题,但这样的话就容易导致一个问题,那就是内容无差异,Obsidian却提示unexplained changes,Windows系统下的解决方法如下,找…...
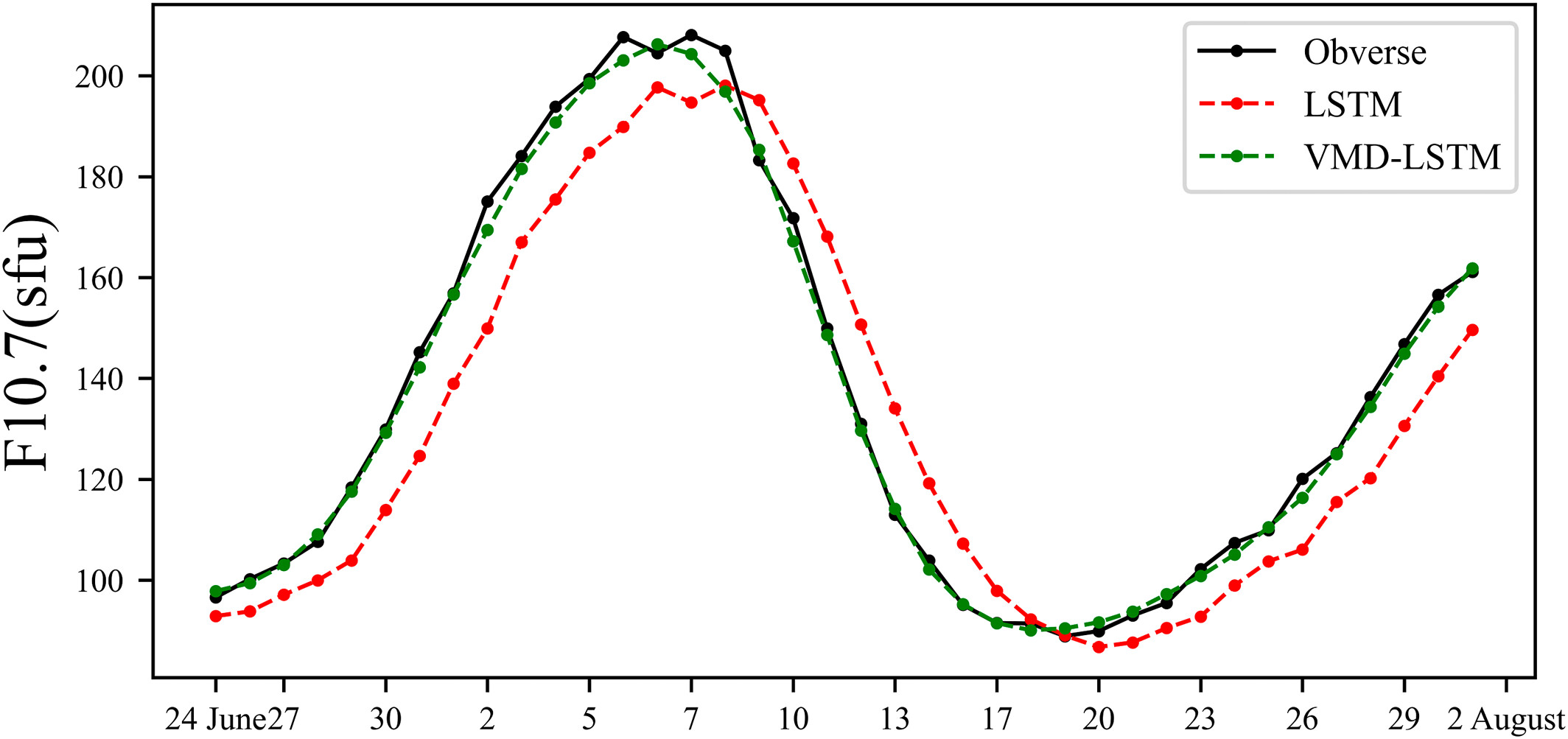
基于VMD-LSTM融合方法的F10.7指数预报
F10.7 Daily Forecast Using LSTM Combined With VMD Method F10.7 solar radiation flux is a well-known parameter that is closely linked to solar activity, serving as a key index for measuring the level of solar activity. In this study, the …...
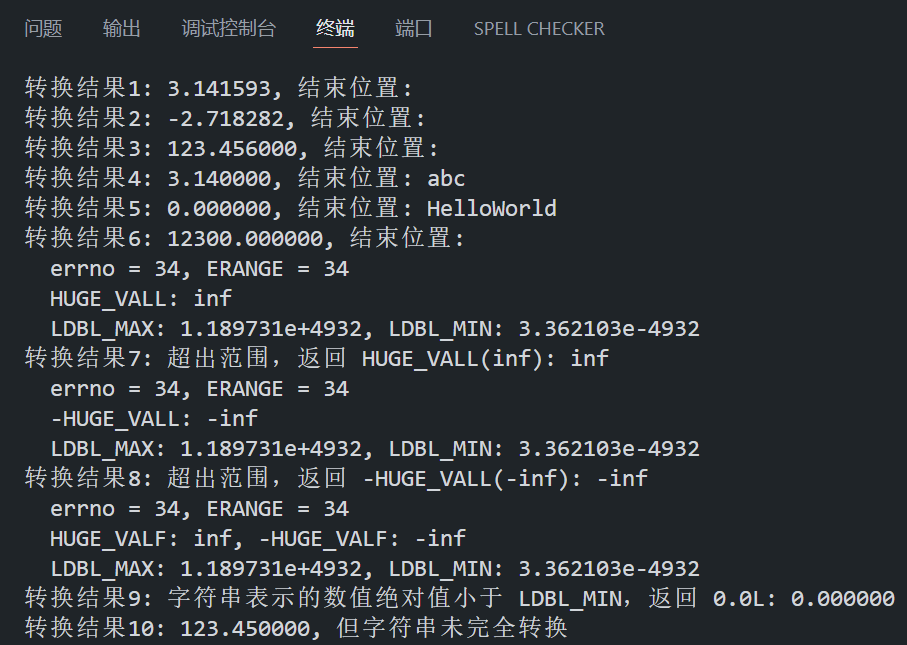
35 C 语言字符串转数值函数详解:strtof、strtod、strtold(含 errno 处理、ERANGE 错误)
1 strtof() 函数 1.1 函数原型 #include <stdlib.h> // 必须包含这个头文件才能使用 strtof() #include <errno.h> // 包含 errno 和 ERANGE #include <float.h> // 包含 FlOAT_MAX 和 FLOAT_MIN #include <math.h> // 包含 HUGE_VALF(inf)float…...