Python60日基础学习打卡Day46
一、 什么是注意力
注意力机制的由来本质是从onehot-elmo-selfattention-encoder-bert这就是一条不断提取特征的路。各有各的特点,也可以说由弱到强。
其中注意力机制是一种让模型学会「选择性关注重要信息」的特征提取器,就像人类视觉会自动忽略背景,聚焦于图片中的主体(如猫、汽车)。 transformer中的叫做自注意力机制,他可以自动学习到图片中的主体并忽略背景。我们现在说的很多模块,比如通道注意力、空间注意力等等,都是基于自注意力机制的。
从数学角度看,注意力机制是对输入特征进行加权求和,输出=∑(输入特征×注意力权重),其中注意力权重是学习到的。所以他和卷积很像,因为卷积也是一种加权求和。但是卷积是 “固定权重” 的特征提取(如 3x3 卷积核)--训练完了就结束了,注意力是 “动态权重” 的特征提取(权重随输入数据变化)---输入数据不同权重不同。
问:为什么需要多种注意力模块? 答:因为不同场景下的关键信息分布不同。例如,识别鸟类和飞机时,需关注 “羽毛纹理”“金属光泽” 等特定通道的特征,通道注意力可强化关键通道;而物体位置不确定时(如猫出现在图像不同位置),空间注意力能聚焦物体所在区域,忽略背景。复杂场景中,可能需要同时关注通道和空间(如混合注意力模块 CBAM),或处理长距离依赖(如全局注意力模块 Non-local)。
问:为什么不设计一个‘万能’注意力模块? 答:主要受效率和灵活性限制。专用模块针对特定需求优化计算,成本更低(如通道注意力仅需处理通道维度,无需全局位置计算);不同任务的核心需求差异大(如医学图像侧重空间定位,自然语言处理侧重语义长距离依赖),通用模块可能冗余或低效。
通道注意力(Channel Attention)属于注意力机制(Attention Mechanism)的变体,而非自注意力(Self-Attention)的直接变体。可以理解为注意力是一个动物园算法,里面很多个物种,自注意力只是一个分支,因为开创了transformer所以备受瞩目。我们今天的内容用通道注意力举例
常见注意力模块的归类如下
| 注意力模块 | 所属类别 | 核心功能 |
|---|---|---|
| 自注意力(Self-Attention) | 自注意力变体 | 建模同一输入内部元素的依赖(如序列位置、图像块) |
| 通道注意力(Channel Attention) | 普通注意力变体(全局上下文) | 建模特征图通道间的重要性,通过全局池化压缩空间信息 |
| 空间注意力(Spatial Attention) | 普通注意力变体(全局上下文) | 建模特征图空间位置的重要性,关注“哪里”更重要 |
| 多头注意力(Multi-Head Attention) | 自注意力/普通注意力的增强版 | 将query/key/value投影到多个子空间,捕捉多维度依赖 |
| 编码器-解码器注意力(Encoder-Decoder Attention) | 普通注意力变体 | 建模编码器输出与解码器输入的跨模态交互(如机器翻译中句子与译文的对齐) |
二、 特征图的提取
2.1 简单CNN的训练
为了好演示,重新训练了之前的cnn代码,你可以直接加载之前保存好的权重试试,一般重新训练1-2轮就会恢复效果。
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 1. 数据预处理
# 训练集:使用多种数据增强方法提高模型泛化能力
train_transform = transforms.Compose([# 随机裁剪图像,从原图中随机截取32x32大小的区域transforms.RandomCrop(32, padding=4),# 随机水平翻转图像(概率0.5)transforms.RandomHorizontalFlip(),# 随机颜色抖动:亮度、对比度、饱和度和色调随机变化transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),# 随机旋转图像(最大角度15度)transforms.RandomRotation(15),# 将PIL图像或numpy数组转换为张量transforms.ToTensor(),# 标准化处理:每个通道的均值和标准差,使数据分布更合理transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 测试集:仅进行必要的标准化,保持数据原始特性,标准化不损失数据信息,可还原
test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=train_transform # 使用增强后的预处理
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=test_transform # 测试集不使用增强
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 4. 定义CNN模型的定义(替代原MLP)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # 继承父类初始化# ---------------------- 第一个卷积块 ----------------------# 卷积层1:输入3通道(RGB),输出32个特征图,卷积核3x3,边缘填充1像素self.conv1 = nn.Conv2d(in_channels=3, # 输入通道数(图像的RGB通道)out_channels=32, # 输出通道数(生成32个新特征图)kernel_size=3, # 卷积核尺寸(3x3像素)padding=1 # 边缘填充1像素,保持输出尺寸与输入相同)# 批量归一化层:对32个输出通道进行归一化,加速训练self.bn1 = nn.BatchNorm2d(num_features=32)# ReLU激活函数:引入非线性,公式:max(0, x)self.relu1 = nn.ReLU()# 最大池化层:窗口2x2,步长2,特征图尺寸减半(32x32→16x16)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # stride默认等于kernel_size# ---------------------- 第二个卷积块 ----------------------# 卷积层2:输入32通道(来自conv1的输出),输出64通道self.conv2 = nn.Conv2d(in_channels=32, # 输入通道数(前一层的输出通道数)out_channels=64, # 输出通道数(特征图数量翻倍)kernel_size=3, # 卷积核尺寸不变padding=1 # 保持尺寸:16x16→16x16(卷积后)→8x8(池化后))self.bn2 = nn.BatchNorm2d(num_features=64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:16x16→8x8# ---------------------- 第三个卷积块 ----------------------# 卷积层3:输入64通道,输出128通道self.conv3 = nn.Conv2d(in_channels=64, # 输入通道数(前一层的输出通道数)out_channels=128, # 输出通道数(特征图数量再次翻倍)kernel_size=3,padding=1 # 保持尺寸:8x8→8x8(卷积后)→4x4(池化后))self.bn3 = nn.BatchNorm2d(num_features=128)self.relu3 = nn.ReLU() # 复用激活函数对象(节省内存)self.pool3 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:8x8→4x4# ---------------------- 全连接层(分类器) ----------------------# 计算展平后的特征维度:128通道 × 4x4尺寸 = 128×16=2048维self.fc1 = nn.Linear(in_features=128 * 4 * 4, # 输入维度(卷积层输出的特征数)out_features=512 # 输出维度(隐藏层神经元数))# Dropout层:训练时随机丢弃50%神经元,防止过拟合self.dropout = nn.Dropout(p=0.5)# 输出层:将512维特征映射到10个类别(CIFAR-10的类别数)self.fc2 = nn.Linear(in_features=512, out_features=10)def forward(self, x):# 输入尺寸:[batch_size, 3, 32, 32](batch_size=批量大小,3=通道数,32x32=图像尺寸)# ---------- 卷积块1处理 ----------x = self.conv1(x) # 卷积后尺寸:[batch_size, 32, 32, 32](padding=1保持尺寸)x = self.bn1(x) # 批量归一化,不改变尺寸x = self.relu1(x) # 激活函数,不改变尺寸x = self.pool1(x) # 池化后尺寸:[batch_size, 32, 16, 16](32→16是因为池化窗口2x2)# ---------- 卷积块2处理 ----------x = self.conv2(x) # 卷积后尺寸:[batch_size, 64, 16, 16](padding=1保持尺寸)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x) # 池化后尺寸:[batch_size, 64, 8, 8]# ---------- 卷积块3处理 ----------x = self.conv3(x) # 卷积后尺寸:[batch_size, 128, 8, 8](padding=1保持尺寸)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x) # 池化后尺寸:[batch_size, 128, 4, 4]# ---------- 展平与全连接层 ----------# 将多维特征图展平为一维向量:[batch_size, 128*4*4] = [batch_size, 2048]x = x.view(-1, 128 * 4 * 4) # -1自动计算批量维度,保持批量大小不变x = self.fc1(x) # 全连接层:2048→512,尺寸变为[batch_size, 512]x = self.relu3(x) # 激活函数(复用relu3,与卷积块3共用)x = self.dropout(x) # Dropout随机丢弃神经元,不改变尺寸x = self.fc2(x) # 全连接层:512→10,尺寸变为[batch_size, 10](未激活,直接输出logits)return x # 输出未经过Softmax的logits,适用于交叉熵损失函数# 初始化模型
model = CNN()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)
# 5. 训练模型(记录每个 iteration 的损失)
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train() # 设置为训练模式# 记录每个 iteration 的损失all_iter_losses = [] # 存储所有 batch 的损失iter_indices = [] # 存储 iteration 序号# 记录每个 epoch 的准确率和损失train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 记录当前 iteration 的损失iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)# 统计准确率和损失running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次打印一次训练信息if (batch_idx + 1) % 100 == 0:print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {iter_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / totaltrain_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_testtest_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)# 更新学习率调度器scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 绘制所有 iteration 的损失曲线plot_iter_losses(all_iter_losses, iter_indices)# 绘制每个 epoch 的准确率和损失曲线plot_epoch_metrics(train_acc_history, test_acc_history, train_loss_history, test_loss_history)return epoch_test_acc # 返回最终测试准确率# 6. 绘制每个 iteration 的损失曲线
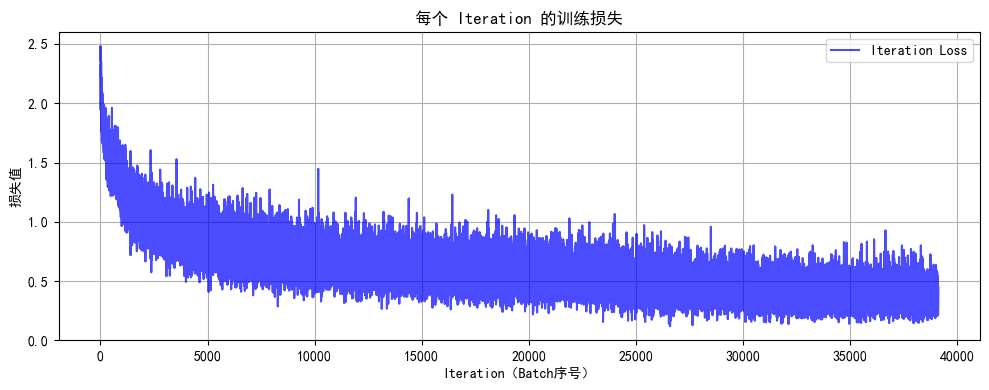
def plot_iter_losses(losses, indices):plt.figure(figsize=(10, 4))plt.plot(indices, losses, 'b-', alpha=0.7, label='Iteration Loss')plt.xlabel('Iteration(Batch序号)')plt.ylabel('损失值')plt.title('每个 Iteration 的训练损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 7. 绘制每个 epoch 的准确率和损失曲线
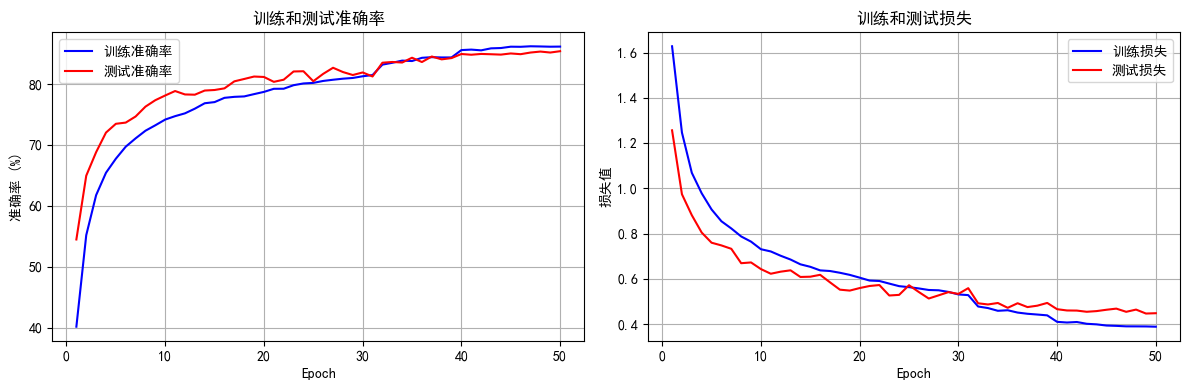
def plot_epoch_metrics(train_acc, test_acc, train_loss, test_loss):epochs = range(1, len(train_acc) + 1)plt.figure(figsize=(12, 4))# 绘制准确率曲线plt.subplot(1, 2, 1)plt.plot(epochs, train_acc, 'b-', label='训练准确率')plt.plot(epochs, test_acc, 'r-', label='测试准确率')plt.xlabel('Epoch')plt.ylabel('准确率 (%)')plt.title('训练和测试准确率')plt.legend()plt.grid(True)# 绘制损失曲线plt.subplot(1, 2, 2)plt.plot(epochs, train_loss, 'b-', label='训练损失')plt.plot(epochs, test_loss, 'r-', label='测试损失')plt.xlabel('Epoch')plt.ylabel('损失值')plt.title('训练和测试损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 8. 执行训练和测试
epochs = 50 # 增加训练轮次为了确保收敛
print("开始使用CNN训练模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cnn_model.pth')
# print("模型已保存为: cifar10_cnn_model.pth")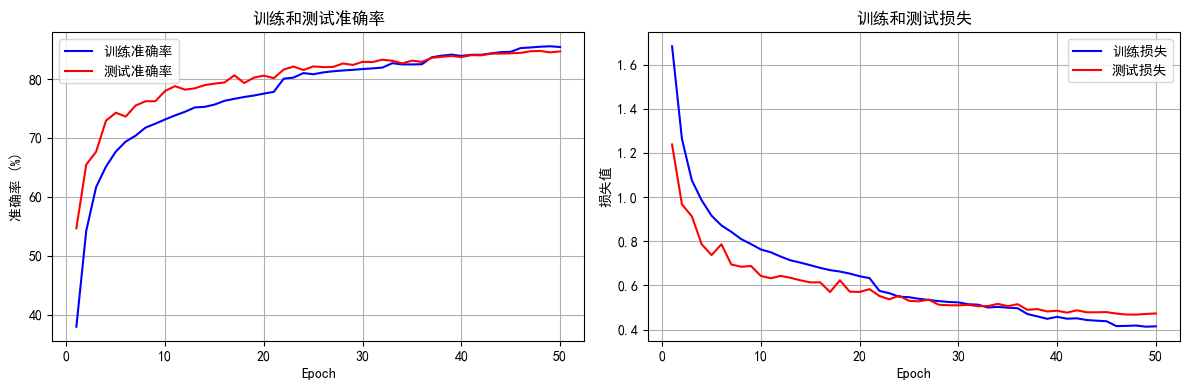
可以看到测试集一定程度上收敛了,在85%左右(还可以继续训练的),我们后续和加了通道注意力的该模型作对比,这也意味着我们进入到了消融实验的部分了。
过去我们都是在同一个数据集上对比不同的模型的差异,或者同一个模型不同参数下的差异,这种实验叫做对比实验。
在同一个数据集上,对同一个模型进行模块的增加和减少,这种实验我们称之为消融实验。通过消融实验,研究者能更清晰地理解模型各部分的作用,而对比实验则用于评估模型的整体竞争力。两者常结合使用,以全面验证模型设计的合理性。
2.2 特征图可视化
为了方便观察,我们先尝试提取下特征图。特征图本质就是不同的卷积核的输出,浅层指的是离输入图近的卷积层,浅层卷积层的特征图通常较大,而深层特征图会经过多次下采样,尺寸显著缩小,尺寸差异过大时,小尺寸特征图在视觉上会显得模糊或丢失细节。步骤逻辑如下:
-
初始化设置:
- 将模型设为评估模式,准备类别名称列表(如飞机、汽车等)。
-
数据加载与处理:
- 从测试数据加载器中获取图像和标签。
- 仅处理前
num_images张图像(如2张)。
-
注册钩子捕获特征图:
- 为指定层(如
conv1,conv2,conv3)注册前向钩子。 - 钩子函数将这些层的输出(特征图)保存到字典中。
- 为指定层(如
-
前向传播与特征提取:
- 模型处理图像,触发钩子函数,获取并保存特征图。
- 移除钩子,避免后续干扰。
-
可视化特征图:
- 对每张图像:
- 恢复原始像素值并显示。
- 为每个目标层创建子图,展示前
num_channels个通道的特征图(如9个通道)。 - 每个通道的特征图以网格形式排列,显示通道编号。
- 对每张图像:
关键细节
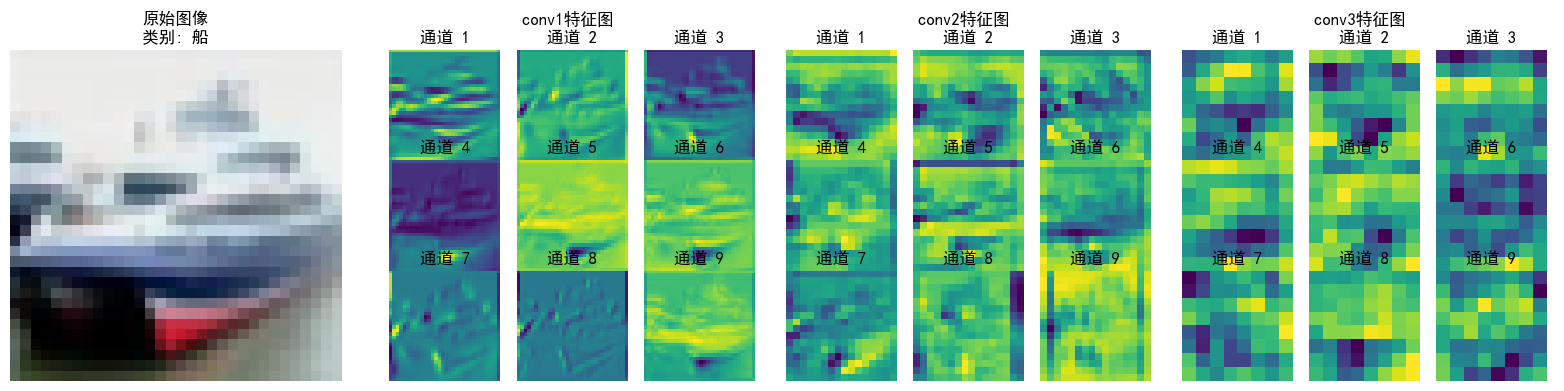
- 特征图布局:原始图像在左侧,各层特征图按顺序排列在右侧。
- 通道选择:默认显示前9个通道(按重要性或索引排序)。
- 显示优化:
- 使用
inset_axes在大图中嵌入小网格,清晰展示每个通道。 - 层标题与通道标题分开,避免重叠。
- 反标准化处理恢复图像原始色彩。
- 使用
def visualize_feature_maps(model, test_loader, device, layer_names, num_images=3, num_channels=9):"""可视化指定层的特征图(修复循环冗余问题)参数:model: 模型test_loader: 测试数据加载器layer_names: 要可视化的层名称(如['conv1', 'conv2', 'conv3'])num_images: 可视化的图像总数num_channels: 每个图像显示的通道数(取前num_channels个通道)"""model.eval() # 设置为评估模式class_names = ['飞机', '汽车', '鸟', '猫', '鹿', '狗', '青蛙', '马', '船', '卡车']# 从测试集加载器中提取指定数量的图像(避免嵌套循环)images_list, labels_list = [], []for images, labels in test_loader:images_list.append(images)labels_list.append(labels)if len(images_list) * test_loader.batch_size >= num_images:break# 拼接并截取到目标数量images = torch.cat(images_list, dim=0)[:num_images].to(device)labels = torch.cat(labels_list, dim=0)[:num_images].to(device)with torch.no_grad():# 存储各层特征图feature_maps = {}# 保存钩子句柄hooks = []# 定义钩子函数,捕获指定层的输出def hook(module, input, output, name):feature_maps[name] = output.cpu() # 保存特征图到字典# 为每个目标层注册钩子,并保存钩子句柄for name in layer_names:module = getattr(model, name)hook_handle = module.register_forward_hook(lambda m, i, o, n=name: hook(m, i, o, n))hooks.append(hook_handle)# 前向传播触发钩子_ = model(images)# 正确移除钩子for hook_handle in hooks:hook_handle.remove()# 可视化每个图像的各层特征图(仅一层循环)for img_idx in range(num_images):img = images[img_idx].cpu().permute(1, 2, 0).numpy()# 反标准化处理(恢复原始像素值)img = img * np.array([0.2023, 0.1994, 0.2010]).reshape(1, 1, 3) + np.array([0.4914, 0.4822, 0.4465]).reshape(1, 1, 3)img = np.clip(img, 0, 1) # 确保像素值在[0,1]范围内# 创建子图num_layers = len(layer_names)fig, axes = plt.subplots(1, num_layers + 1, figsize=(4 * (num_layers + 1), 4))# 显示原始图像axes[0].imshow(img)axes[0].set_title(f'原始图像\n类别: {class_names[labels[img_idx]]}')axes[0].axis('off')# 显示各层特征图for layer_idx, layer_name in enumerate(layer_names):fm = feature_maps[layer_name][img_idx] # 取第img_idx张图像的特征图fm = fm[:num_channels] # 仅取前num_channels个通道num_rows = int(np.sqrt(num_channels))num_cols = num_channels // num_rows if num_rows != 0 else 1# 创建子图网格layer_ax = axes[layer_idx + 1]layer_ax.set_title(f'{layer_name}特征图 \n')# 加个换行让文字分离上去layer_ax.axis('off') # 关闭大子图的坐标轴# 在大子图内创建小网格for ch_idx, channel in enumerate(fm):ax = layer_ax.inset_axes([ch_idx % num_cols / num_cols, (num_rows - 1 - ch_idx // num_cols) / num_rows, 1/num_cols, 1/num_rows])ax.imshow(channel.numpy(), cmap='viridis')ax.set_title(f'通道 {ch_idx + 1}')ax.axis('off')plt.tight_layout()plt.show()# 调用示例(按需修改参数)
layer_names = ['conv1', 'conv2', 'conv3']
visualize_feature_maps(model=model,test_loader=test_loader,device=device,layer_names=layer_names,num_images=5, # 可视化5张测试图像 → 输出5张大图num_channels=9 # 每张图像显示前9个通道的特征图
)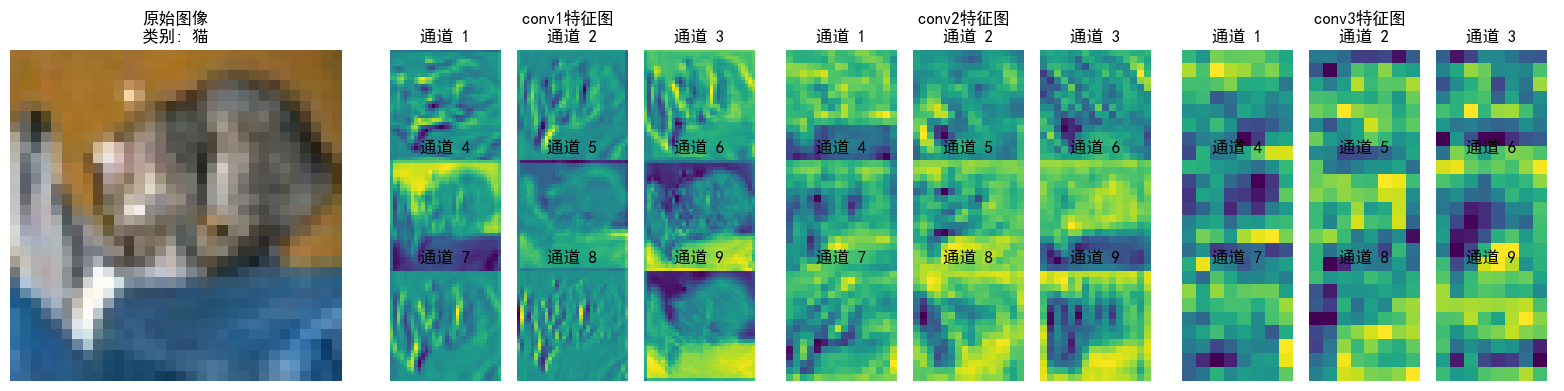
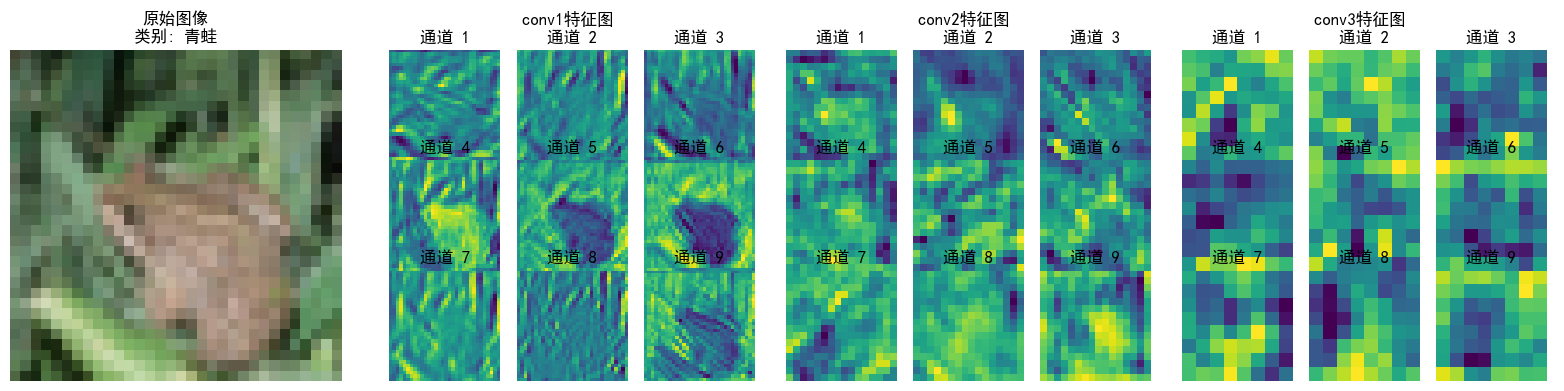
我们以第3张图片-青蛙 进行解读。
由于经过了不断的下采样,特征变得越来越抽象,人类已经无法理解。
核心作用 通过可视化特征图,可直观观察:
- 浅层卷积层(如
conv1)如何捕获边缘、纹理等低级特征。 - 深层卷积层(如
conv3)如何组合低级特征形成语义概念(如物体部件)。 - 模型对不同类别的关注区域差异(如鸟类的羽毛纹理 vs. 飞机的金属光泽)。
conv1 特征图(浅层卷积)
- 特点:
- 保留较多原始图像的细节纹理(如植物叶片、青蛙身体的边缘轮廓)。
- 通道间差异相对小,每个通道都能看到类似原始图像的基础结构(如通道 1 - 9 都能识别边缘、纹理)。
- 意义:
- 提取低级特征(边缘、颜色块、简单纹理),是后续高层特征的“原材料”。
- 类似人眼初步识别图像的轮廓和基础结构。
conv2 特征图(中层卷积)
- 特点:
- 空间尺寸(高、宽)比 conv1 更小(因卷积/池化下采样),但语义信息更抽象。
- 通道间差异更明显:部分通道开始聚焦局部关键特征(如通道 5、8 中黄色高亮区域,可能对应青蛙身体或植物的关键纹理)。
- 意义:
- 对 conv1 的低级特征进行组合与筛选,提取中级特征(如局部形状、纹理组合)。
- 类似人眼从“边缘轮廓”过渡到“识别局部结构”(如青蛙的身体块、植物的叶片簇)。
conv3 特征图(深层卷积)
- 特点:
- 空间尺寸进一步缩小,抽象程度最高,肉眼难直接对应原始图像细节。
- 通道间差异极大,部分通道聚焦全局语义特征(如通道 4、7 中黄色区域,可能对应模型判断“青蛙”类别的关键特征)。
- 意义:
- 对 conv2 的中级特征进行全局整合,提取高级语义特征(如物体类别相关的抽象模式)。
- 类似人眼最终“识别出这是青蛙”的关键依据,模型通过这些特征判断类别。
逐层对比总结
| 层级 | 特征图特点 | 对应模型能力 | 类比人类视觉流程 |
|---|---|---|---|
| 原始图像 | 细节丰富但无抽象语义 | 无(纯输入) | 视网膜接收原始光信号 |
| conv1 | 保留基础细节,提取低级特征 | 识别边缘、纹理 | 视觉皮层初步解析轮廓 |
| conv2 | 抽象化,提取局部关键特征 | 识别局部结构(如身体块、叶片簇) | 大脑进一步组合特征识别局部模式 |
| conv3 | 高度抽象,聚焦全局语义特征 | 识别类别相关核心模式 | 大脑最终整合信息判断“这是青蛙” |
- 特征逐层抽象:从“看得见的细节”(conv1)→ “局部结构”(conv2)→ “类别相关的抽象模式”(conv3),模型通过这种方式实现从“看图像”到“理解语义”的跨越。
- 通道分工明确:不同通道在各层聚焦不同特征(如有的通道负责边缘,有的负责颜色,有的负责全局语义),共同协作完成分类任务。
- 下采样的作用:通过缩小空间尺寸,换取更高的语义抽象能力(“牺牲细节,换取理解”)。
三、通道注意力
现在我们引入通道注意力,来观察精度是否有变化,并且进一步可视化。想要把通道注意力插入到模型中,关键步骤如下:
- 定义注意力模块
- 重写之前的模型定义部分,确定好模块插入的位置
3.1 通道注意力的定义
# ===================== 新增:通道注意力模块(SE模块) =====================
class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_ratio=16):"""参数:in_channels: 输入特征图的通道数reduction_ratio: 降维比例,用于减少参数量"""super(ChannelAttention, self).__init__()# 全局平均池化 - 将空间维度压缩为1x1,保留通道信息self.avg_pool = nn.AdaptiveAvgPool2d(1)# 全连接层 + 激活函数,用于学习通道间的依赖关系self.fc = nn.Sequential(# 降维:压缩通道数,减少计算量nn.Linear(in_channels, in_channels // reduction_ratio, bias=False),nn.ReLU(inplace=True),# 升维:恢复原始通道数nn.Linear(in_channels // reduction_ratio, in_channels, bias=False),# Sigmoid将输出值归一化到[0,1],表示通道重要性权重nn.Sigmoid())def forward(self, x):"""参数:x: 输入特征图,形状为 [batch_size, channels, height, width]返回:加权后的特征图,形状不变"""batch_size, channels, height, width = x.size()# 1. 全局平均池化:[batch_size, channels, height, width] → [batch_size, channels, 1, 1]avg_pool_output = self.avg_pool(x)# 2. 展平为一维向量:[batch_size, channels, 1, 1] → [batch_size, channels]avg_pool_output = avg_pool_output.view(batch_size, channels)# 3. 通过全连接层学习通道权重:[batch_size, channels] → [batch_size, channels]channel_weights = self.fc(avg_pool_output)# 4. 重塑为二维张量:[batch_size, channels] → [batch_size, channels, 1, 1]channel_weights = channel_weights.view(batch_size, channels, 1, 1)# 5. 将权重应用到原始特征图上(逐通道相乘)return x * channel_weights # 输出形状:[batch_size, channels, height, width]通道注意力模块的核心原理
- Squeeze(压缩):
- 通过全局平均池化将每个通道的二维特征图(H×W)压缩为一个标量,保留通道的全局信息。
- 物理意义:计算每个通道在整个图像中的 “平均响应强度”,例如,“边缘检测通道” 在有物体边缘的图像中响应值会更高。
- Excitation(激发):
- 通过全连接层 + Sigmoid 激活,学习通道间的依赖关系,输出 0-1 之间的权重值。
- 物理意义:让模型自动判断哪些通道更重要(权重接近 1),哪些通道可忽略(权重接近 0)。
- Reweight(重加权):
- 将学习到的通道权重与原始特征图逐通道相乘,增强重要通道,抑制不重要通道。
- 物理意义:类似人类视觉系统聚焦于关键特征(如猫的轮廓),忽略无关特征(如背景颜色)
通道注意力插入后,参数量略微提高,增加了特征提取能力
3.2 模型的重新定义(通道注意力的插入)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # ---------------------- 第一个卷积块 ----------------------self.conv1 = nn.Conv2d(3, 32, 3, padding=1)self.bn1 = nn.BatchNorm2d(32)self.relu1 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca1 = ChannelAttention(in_channels=32, reduction_ratio=16) self.pool1 = nn.MaxPool2d(2, 2) # ---------------------- 第二个卷积块 ----------------------self.conv2 = nn.Conv2d(32, 64, 3, padding=1)self.bn2 = nn.BatchNorm2d(64)self.relu2 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca2 = ChannelAttention(in_channels=64, reduction_ratio=16) self.pool2 = nn.MaxPool2d(2) # ---------------------- 第三个卷积块 ----------------------self.conv3 = nn.Conv2d(64, 128, 3, padding=1)self.bn3 = nn.BatchNorm2d(128)self.relu3 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca3 = ChannelAttention(in_channels=128, reduction_ratio=16) self.pool3 = nn.MaxPool2d(2) # ---------------------- 全连接层(分类器) ----------------------self.fc1 = nn.Linear(128 * 4 * 4, 512)self.dropout = nn.Dropout(p=0.5)self.fc2 = nn.Linear(512, 10)def forward(self, x):# ---------- 卷积块1处理 ----------x = self.conv1(x) x = self.bn1(x) x = self.relu1(x) x = self.ca1(x) # 应用通道注意力x = self.pool1(x) # ---------- 卷积块2处理 ----------x = self.conv2(x) x = self.bn2(x) x = self.relu2(x) x = self.ca2(x) # 应用通道注意力x = self.pool2(x) # ---------- 卷积块3处理 ----------x = self.conv3(x) x = self.bn3(x) x = self.relu3(x) x = self.ca3(x) # 应用通道注意力x = self.pool3(x) # ---------- 展平与全连接层 ----------x = x.view(-1, 128 * 4 * 4) x = self.fc1(x) x = self.relu3(x) x = self.dropout(x) x = self.fc2(x) return x # 重新初始化模型,包含通道注意力模块
model = CNN()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)
# 训练模型(复用原有的train函数)
print("开始训练带通道注意力的CNN模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs=50)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")
训练完成!最终测试准确率: 85.38%
在同样50个epoch后精度略有提升
我们关注的不只是精度的差异,还包含了同精度下训练时长的差异等,在大规模数据集上推理时长、训练时长都非常重要。因为资源是有限的。
可视化部分同理,在训练完成后通过钩子函数取出权重or梯度,即可进行特征图的可视化、Grad-CAM可视化、注意力热图可视化

# 可视化空间注意力热力图(显示模型关注的图像区域)
def visualize_attention_map(model, test_loader, device, class_names, num_samples=3):"""可视化模型的注意力热力图,展示模型关注的图像区域"""model.eval() # 设置为评估模式with torch.no_grad():for i, (images, labels) in enumerate(test_loader):if i >= num_samples: # 只可视化前几个样本breakimages, labels = images.to(device), labels.to(device)# 创建一个钩子,捕获中间特征图activation_maps = []def hook(module, input, output):activation_maps.append(output.cpu())# 为最后一个卷积层注册钩子(获取特征图)hook_handle = model.conv3.register_forward_hook(hook)# 前向传播,触发钩子outputs = model(images)# 移除钩子hook_handle.remove()# 获取预测结果_, predicted = torch.max(outputs, 1)# 获取原始图像img = images[0].cpu().permute(1, 2, 0).numpy()# 反标准化处理img = img * np.array([0.2023, 0.1994, 0.2010]).reshape(1, 1, 3) + np.array([0.4914, 0.4822, 0.4465]).reshape(1, 1, 3)img = np.clip(img, 0, 1)# 获取激活图(最后一个卷积层的输出)feature_map = activation_maps[0][0].cpu() # 取第一个样本# 计算通道注意力权重(使用SE模块的全局平均池化)channel_weights = torch.mean(feature_map, dim=(1, 2)) # [C]# 按权重对通道排序sorted_indices = torch.argsort(channel_weights, descending=True)# 创建子图fig, axes = plt.subplots(1, 4, figsize=(16, 4))# 显示原始图像axes[0].imshow(img)axes[0].set_title(f'原始图像\n真实: {class_names[labels[0]]}\n预测: {class_names[predicted[0]]}')axes[0].axis('off')# 显示前3个最活跃通道的热力图for j in range(3):channel_idx = sorted_indices[j]# 获取对应通道的特征图channel_map = feature_map[channel_idx].numpy()# 归一化到[0,1]channel_map = (channel_map - channel_map.min()) / (channel_map.max() - channel_map.min() + 1e-8)# 调整热力图大小以匹配原始图像from scipy.ndimage import zoomheatmap = zoom(channel_map, (32/feature_map.shape[1], 32/feature_map.shape[2]))# 显示热力图axes[j+1].imshow(img)axes[j+1].imshow(heatmap, alpha=0.5, cmap='jet')axes[j+1].set_title(f'注意力热力图 - 通道 {channel_idx}')axes[j+1].axis('off')plt.tight_layout()plt.show()# 调用可视化函数
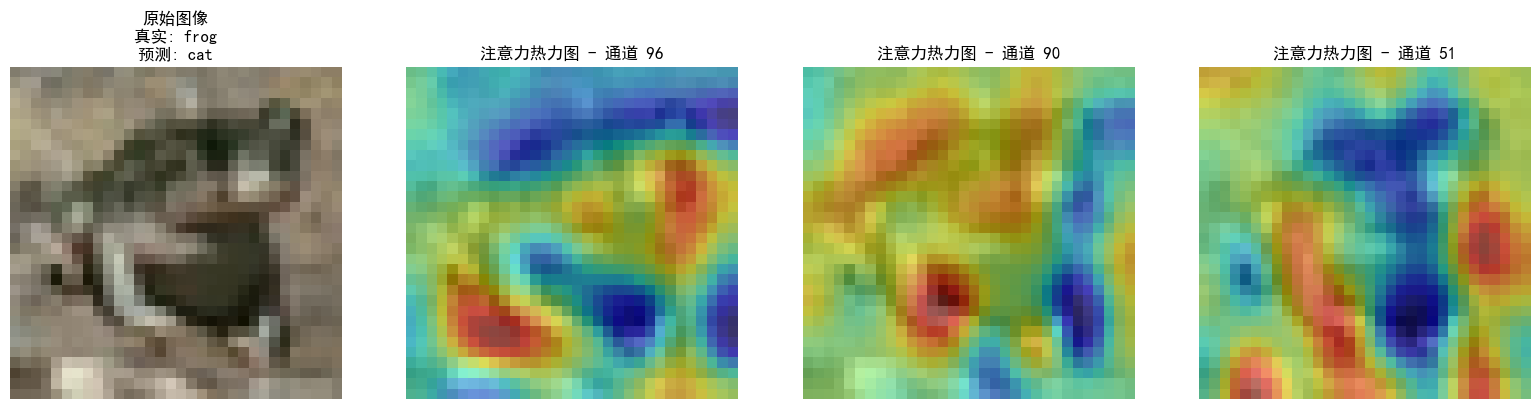
visualize_attention_map(model, test_loader, device, class_names, num_samples=3)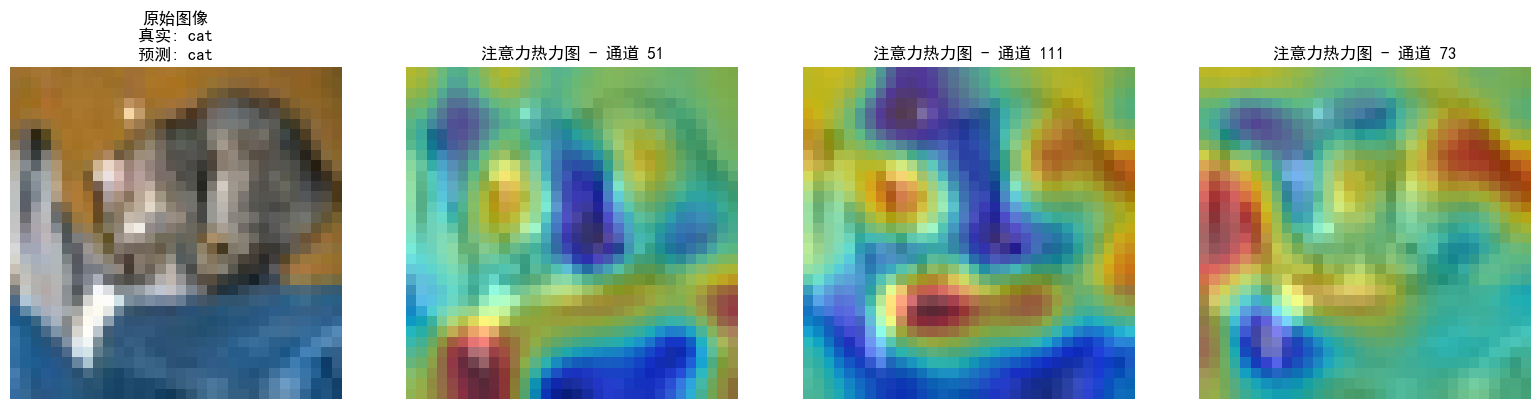
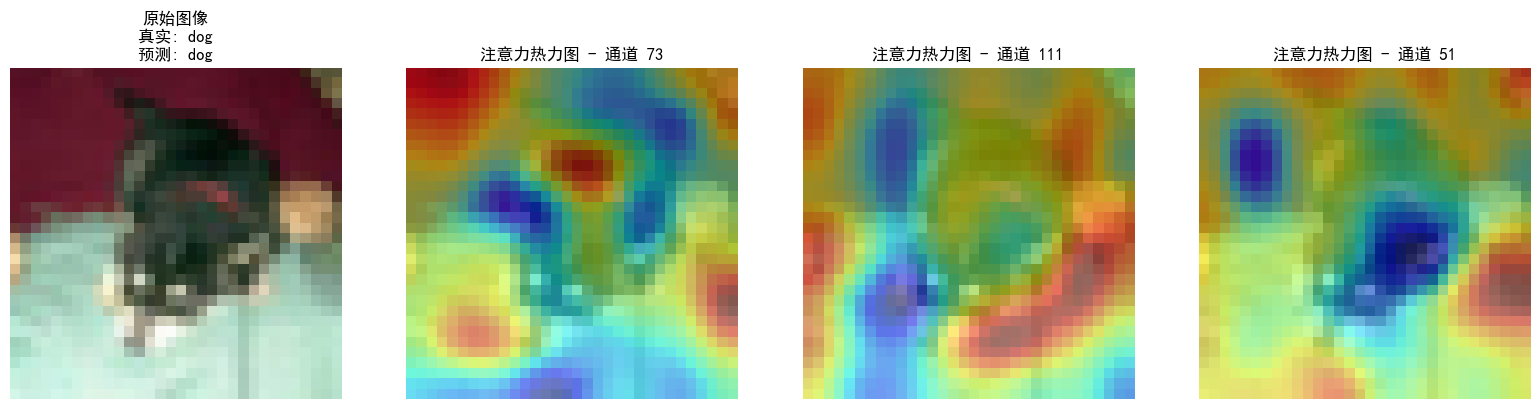
这个注意力热图是通过构子机制: register_forward_hook 捕获最后一个卷积层(conv3)的输出特征图。
- 通道权重计算:对特征图的每个通道进行全局平均池化,得到通道重要性权重。
- 热力图生成:将高权重通道的特征图缩放至原始图像尺寸,与原图叠加显示。
热力图(红色表示高关注,蓝色表示低关注)半透明覆盖在原图上。主要从以下方面理解:
- 高关注区域(红色):模型认为对分类最重要的区域。
例如:- 在识别“狗”时,热力图可能聚焦狗的面部、身体轮廓或特征性纹理。
- 若热力图错误聚焦背景(如红色区域在无关物体上),可能表示模型过拟合或训练不足。
相关文章:
Python60日基础学习打卡Day46
一、 什么是注意力 注意力机制的由来本质是从onehot-elmo-selfattention-encoder-bert这就是一条不断提取特征的路。各有各的特点,也可以说由弱到强。 其中注意力机制是一种让模型学会「选择性关注重要信息」的特征提取器,就像人类视觉会自动忽略背景&…...

综述论文解读:Editing Large Language Models: Problems, Methods, and Opportunities
论文为大语言模型知识编辑综述,发表于自然语言处理顶会ACL(原文链接)。由于目前存在广泛的模型编辑技术,但一个统一全面的分析评估方法,所以本文: 1、对LLM的编辑方法进行了详尽、公平的实证分析,探讨了它们各自的优势…...
WEB3全栈开发——面试专业技能点P1Node.js / Web3.js / Ethers.js
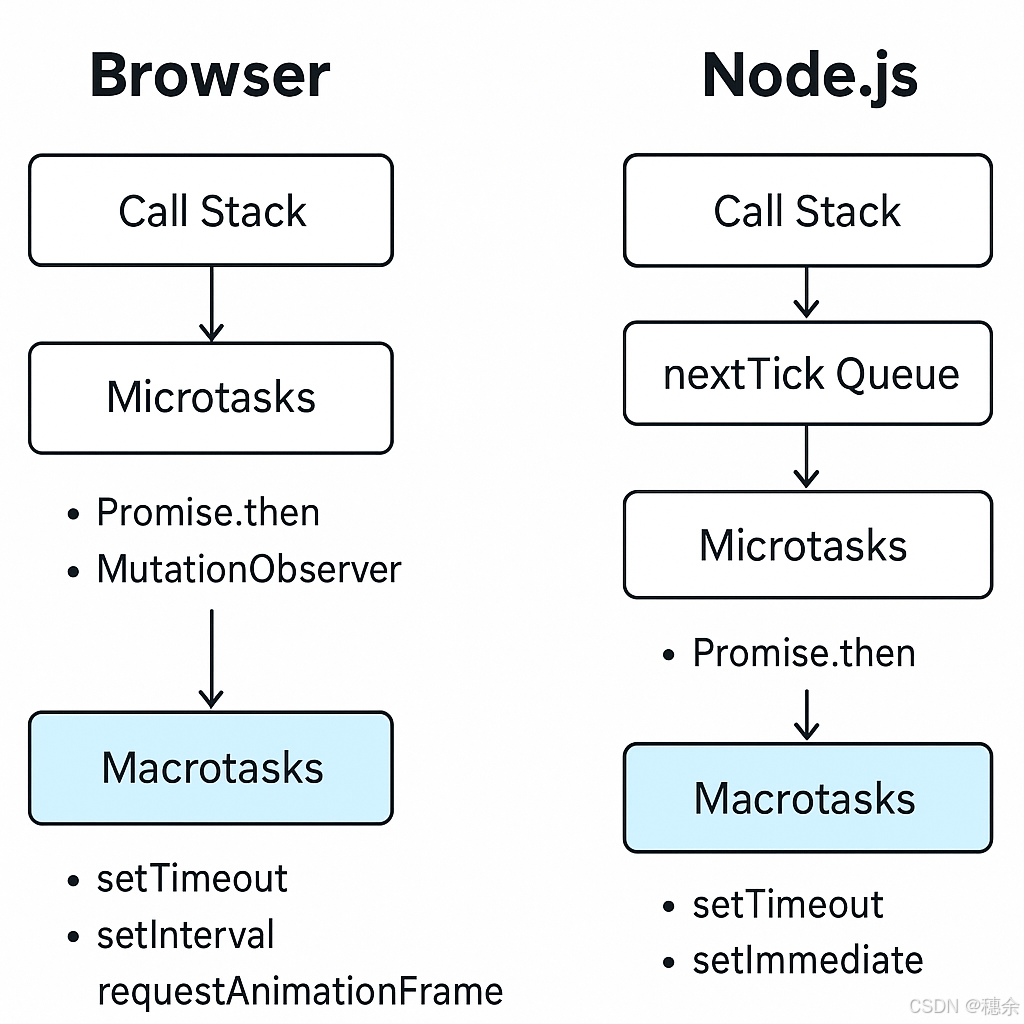
一、Node.js 事件循环 Node.js 的事件循环(Event Loop)是其异步编程的核心机制,它使得 Node.js 可以在单线程中实现非阻塞 I/O 操作。 🔁 简要原理 Node.js 是基于 libuv 实现的,它使用事件循环来处理非阻塞操作。事件…...
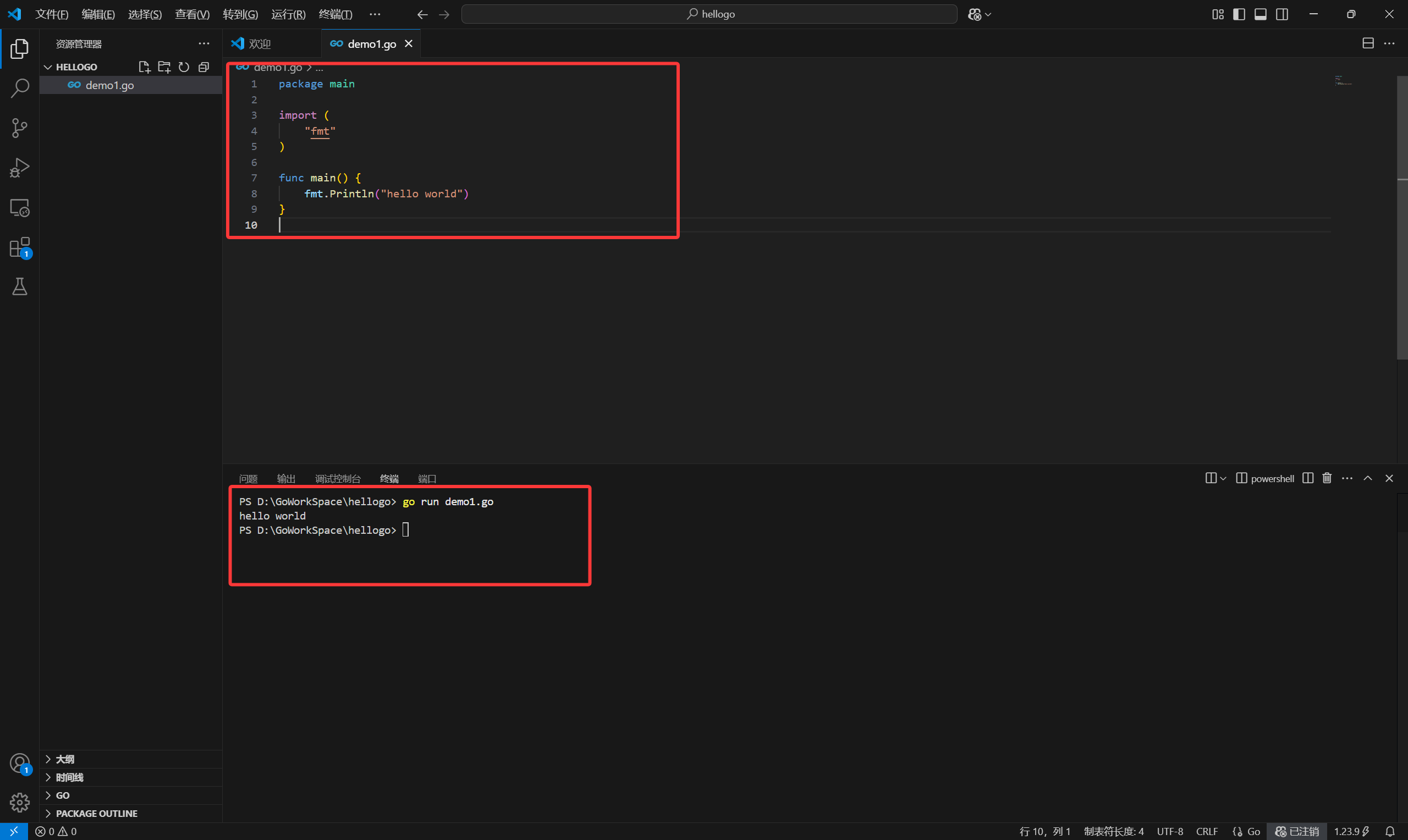
Vscode下Go语言环境配置
前言 本文介绍了vscode下Go语言开发环境的快速配置,为新手小白快速上手Go语言提供帮助。 1.下载官方Vscode 这步比较基础,已经安装好的同学可以直接快进到第二步 官方安装包地址:https://code.visualstudio.com/ 双击一直点击下一步即可,记…...

Java八股文——MySQL篇
文章目录 Java八股文——MySQL篇慢查询如何定位慢查询?如何分析慢SQLExplain标准答案 索引索引类型索引底层数据结构什么是聚簇索引什么是非聚簇索引?(二级索引)(回表)聚集索引选取规则回表查询 什么是覆盖…...

Oracle数据库学习笔记 - 创建、备份和恢复
Oracle数据库学习笔记 创建,备份和恢复 Oracle 版本基于11g 尽量不使用图形界面方式,操作适用于linux和windows 创建数据库 创建实例 # 步骤1:设置环境变量 export ORACLE_SIDmyorcl export ORACLE_HOME/u01/app/oracle/product/19.0.0/dbh…...
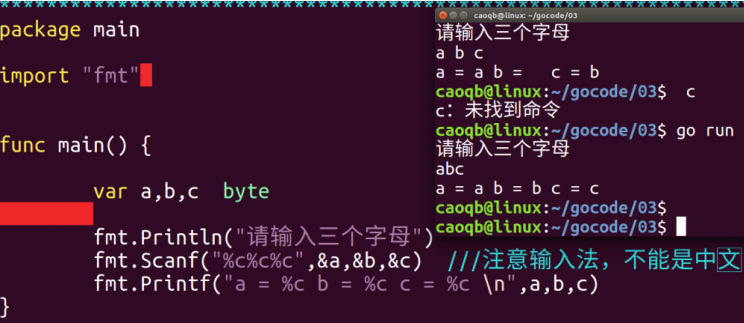
Go语言--语法基础5--基本数据类型--输入输出(1)
I : input 输入操作 格式化输入 scanf O : output 输出操作 格式化输出 printf 标准输入 》键盘设备 》 Stdin 标准输出 》显示器终端 》 Stdout 异常输出 》显示器终端 》 Stderr 1 、输入语句 Go 语言的标准输出流在打印到屏幕时有些参数跟别的语言…...

永磁同步电机无速度算法--自适应龙贝格观测器
一、原理介绍 传统龙伯格观测器,在设计观测器反馈增益矩阵K时,为简化分析与设计,根据静止两相坐标系下的对称关系,只引入了K、K,两个常系数,且在实际应用时,大多是通过试凑找到一组合适的反馈增益系数缺乏…...
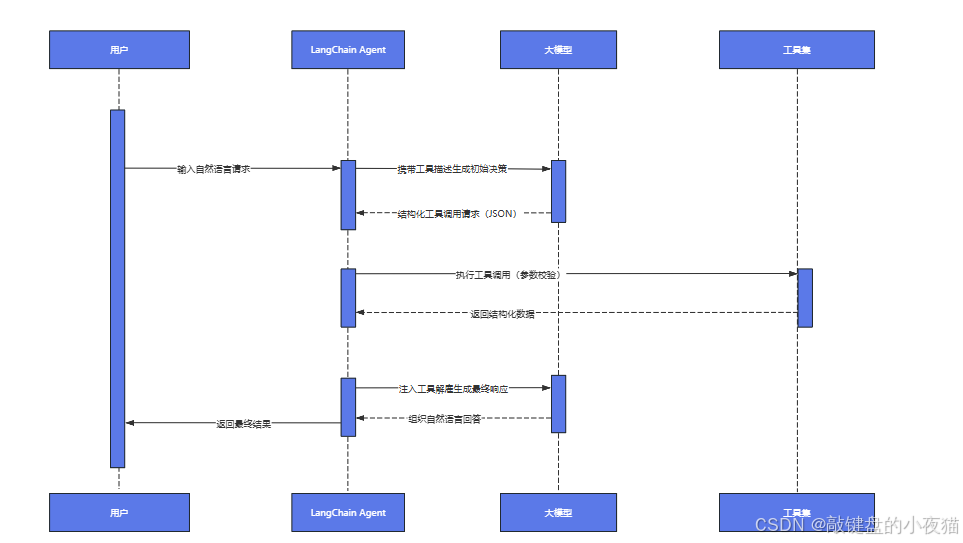
LangChain工具集成实战:构建智能问答系统完整指南
导读:在人工智能快速发展的今天,如何构建一个既能理解自然语言又能调用外部工具的智能问答系统,成为许多开发者面临的核心挑战。本文将为您提供一套完整的解决方案,从LangChain内置工具包的基础架构到复杂系统的工程实践。 文章深…...

【razor】x264 在 的intra-refresh和IDR插帧
你提到的是这样一个情况: 使用 DirectShow 采集,帧率稳定(如回调了20帧)使用 x264 的 total intra refresh 模式(intra-refresh=1) 进行编码但编码过程中「隔几十秒才有一帧intra(关键帧)」这不正常,具体分析如下: 🎯 一、问题核心 x264 的 intra refresh 模式(特…...

分库分表的取舍
文章目录 大数据量下采用**水平分表**的缺点**1. 跨表查询复杂性与性能下降****2. 数据分布不均衡****3. 分布式事务与一致性问题****4. 扩展性受限****5. 查询条件限制与索引管理复杂****6. 数据迁移与维护成本高****7. 业务逻辑复杂度增加****总结** shardingJdbc分片策略**1…...

随机算法一文深度全解
随机算法一文深度全解 一、随机算法基础1.1 定义与核心特性1.2 算法优势与局限 二、随机算法经典案例2.1 随机化快速排序原理推导问题分析与策略代码实现(Python、Java、C) 2.2 蒙特卡罗方法计算 π 值原理推导问题分析与策略代码实现(Python…...
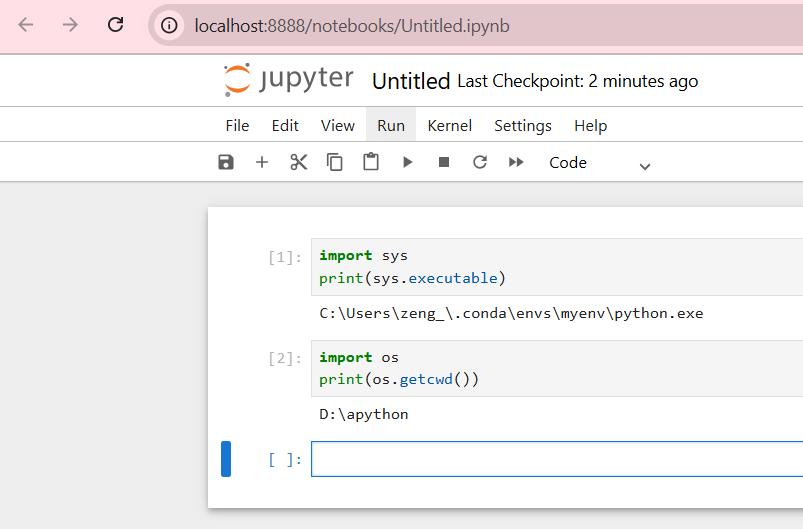
在 Conda 环境下配置 Jupyter Notebook 环境和工作目录
作为数据科学家或Python开发者,Jupyter Notebook 是我们日常工作的得力工具。本文将详细介绍如何在 Conda 环境中配置 Jupyter Notebook,包括环境设置和工作目录管理,帮助你打造高效的工作流程。 为什么要在 Conda 环境中使用 Jupyter Noteb…...
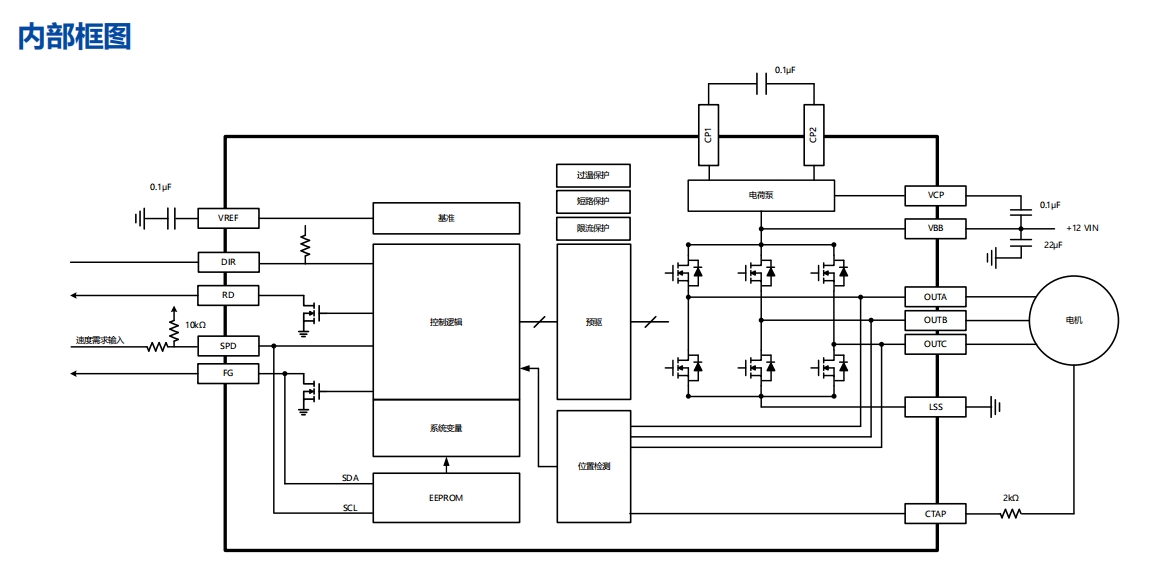
MS39531N 是一款正弦驱动的三相无感直流电机驱动器,具有最小振动和高效率的特点
MS39531N 是一款正弦驱动的三相无感直流电机驱动器,具有最小振动和高效率的特点 简述 MS39531 是一款正弦驱动的 三相无感直流电机驱动器 ,具有最小振动和高效率的特点。该驱动器内部集成了基本的闭环速度控制功能,能够根据特定的应用定制电…...
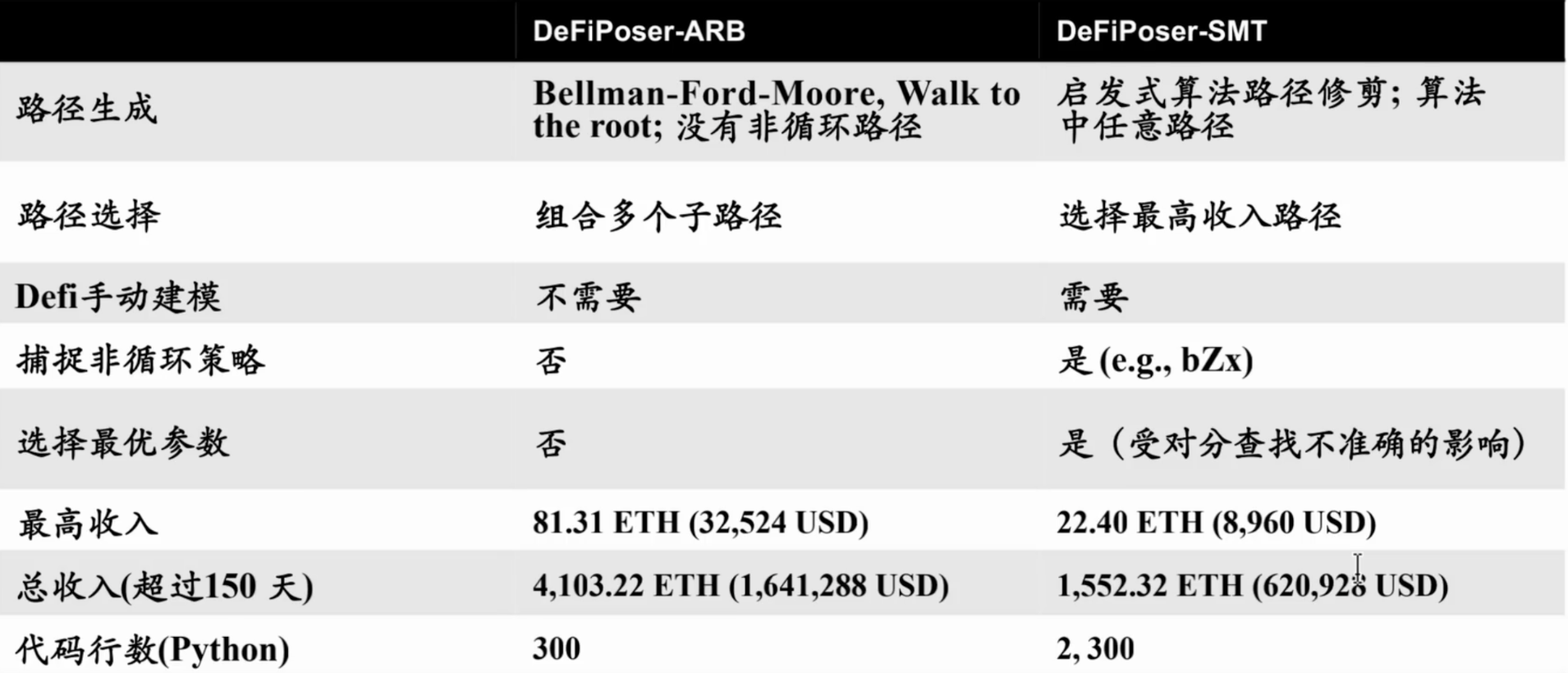
web3-基于贝尔曼福特算法(Bellman-Ford )与 SMT 的 Web3 DeFi 套利策略研究
web3-基于贝尔曼福特算法(Bellman-Ford )与 SMT 的 Web3 DeFi 套利策略研究 如何找到Defi中的交易机会 把defi看做是一个完全开放的金融产品图表,可以看到所有的一切东西;我们要沿着这些金融图表找到一些最优的路径,就…...
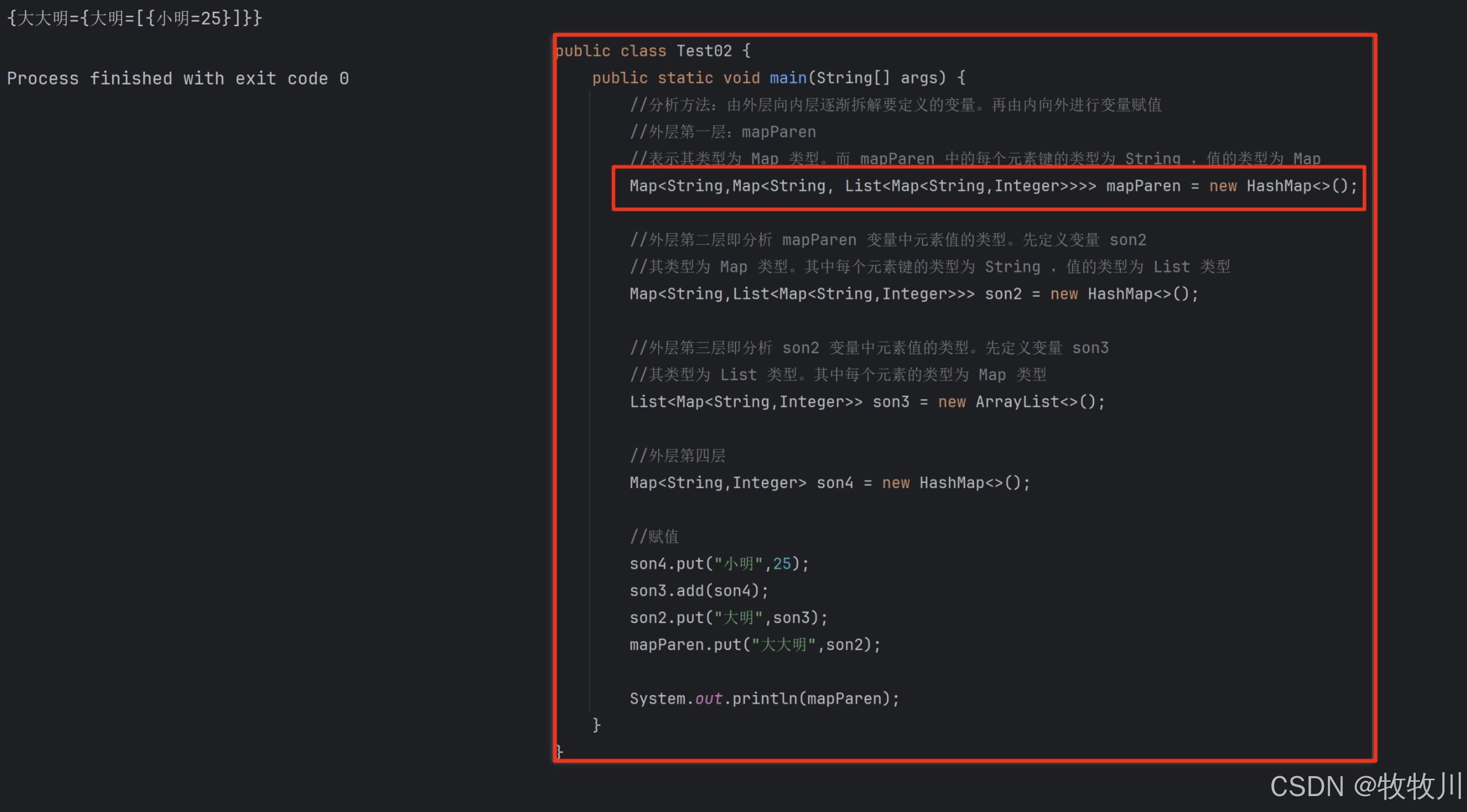
分析 java 的 Map<String,Map<String, List<Map<String,Integer>>>>
import java.util.ArrayList; import java.util.HashMap; import java.util.List; import java.util.Map;public class Test02 {public static void main(String[] args) {//分析方法:由外层向内层逐渐拆解要定义的变量。再由内向外进行变量赋值//外层第一层&#x…...

ChatterBox - 轻巧快速的语音克隆与文本转语音模型,支持情感控制 支持50系显卡 一键整合包下载
ChatterBox 是一个近期备受关注的开源语音克隆与文本转语音(TTS)模型,由 Resemble AI 推出,具备体积轻巧及超快的推理速度等特色。它也是首个支持情感夸张控制的开放源代码 TTS 模型,这一强大功能能让您的声音脱颖而出…...
前端开发面试题总结-HTML篇
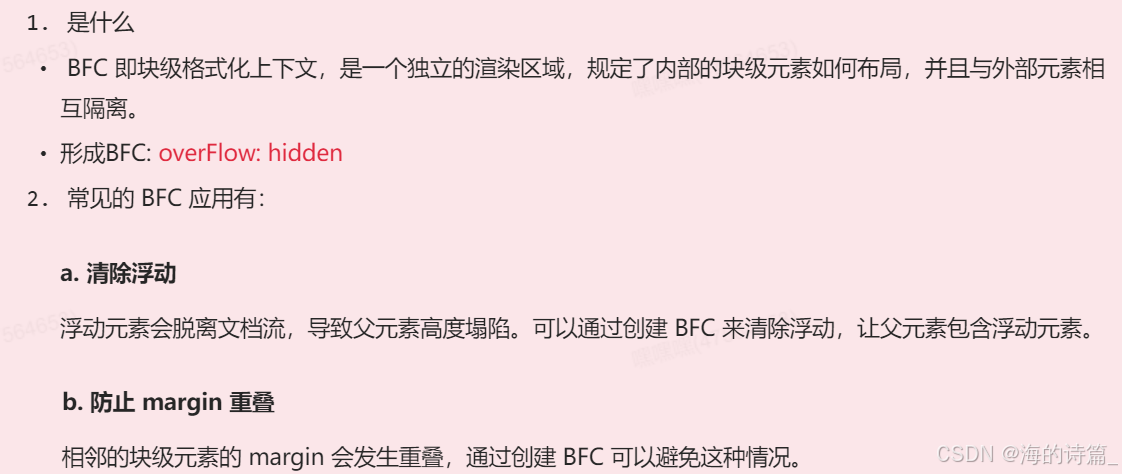
文章目录 HTML面试高频问答一、HTML 的 src 和 href 属性有什么区别?二、什么是 HTML 语义化?三、HTML的 script 标签中 defer 和 async 有什么区别?四、HTML5 相比于 HTML有哪些更新?五、HTML行内元素有哪些? 块级元素有哪些? 空(void)元素有哪些?六、iframe有哪些优点…...
嵌入式学习--江协stm32day4
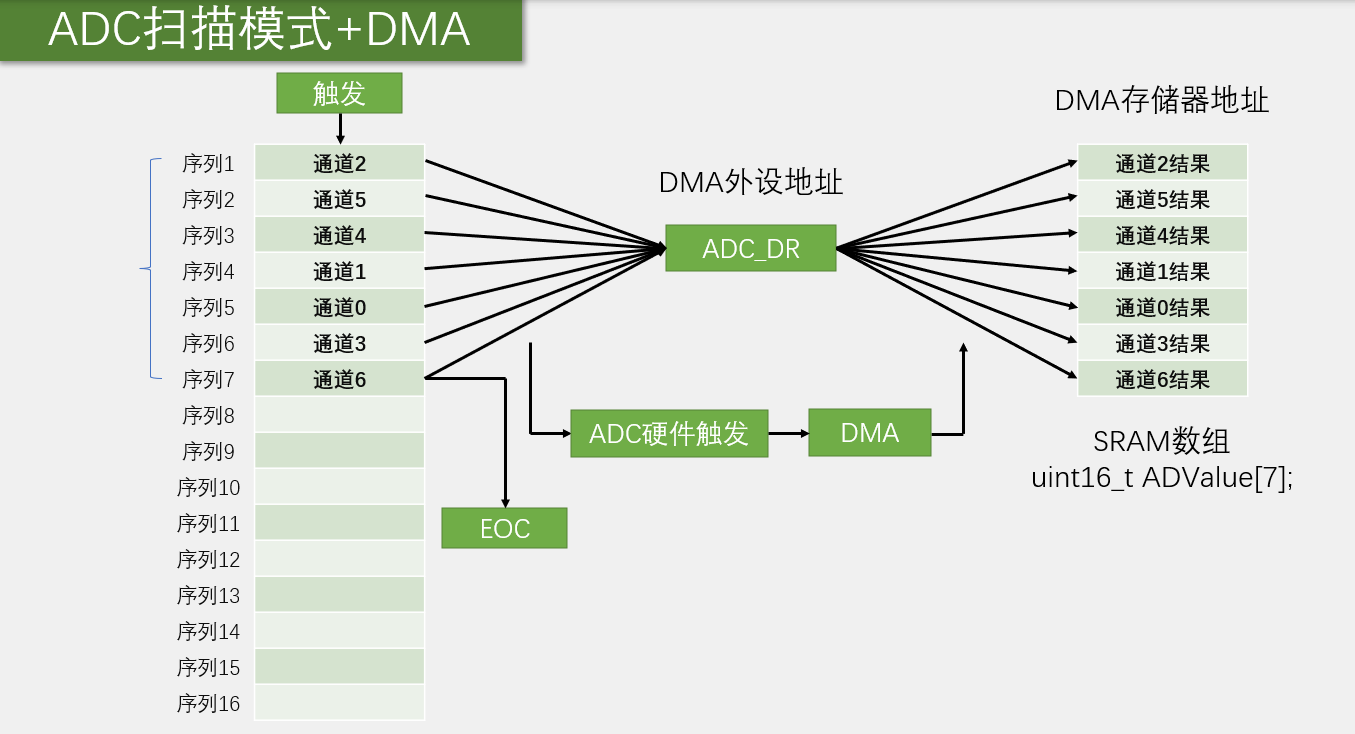
只能说拖延没有什么好结果,欠下的债总是要还的。 ADC 模拟信号转化为数字信号,例如温度传感器将外部温度的变化(模拟信号),转换为内部电压的变化(数字信号) IN是八路输入,下方是选择…...
【Matlab】连接SQL Server 全过程
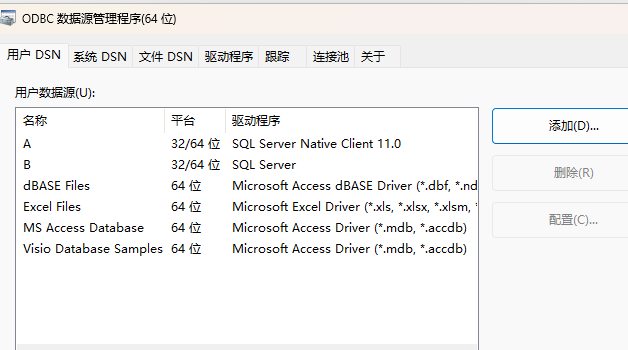
文章目录 一、下载与安装1.1 SQL Server1.2 SSMS1.3 OLE DB 驱动程序 二、数据库配置2.1 SSMS2.2 SQL Server里面设置2.3 设置防火墙2.4 设置ODBC数据源 三、matlab 链接测试 一、下载与安装 微软的,所以直接去微软官方下载即可。 1.1 SQL Server 下载最免费的Ex…...

MS8551/MS8552/MS8554 单电源、轨到轨输入输出、高精度运放,可替代AD8551/AD8552/AD8554
MS8551/MS8552/MS8554 单电源、轨到轨输入输出、高精度运放,可替代AD8551/AD8552/AD8554 简述 MS8551/8552/8554 是轨到轨输入输出的高精度运算放大器,它有极低的输入失调电压和偏置电流,单电源电压范围为 1.8V 到 5V 。 MS8551/8552/85…...

什么是 Ansible 主机和组变量
Ansible 是一款强大的自动化工具,可简化配置管理、应用程序部署和预配等 IT 任务。其最有价值的功能之一是能够定义变量,从而为不同的主机和组定制剧本。本文将解释 Ansible 中组变量和主机变量的概念,并通过实际示例说明它们的用法。 Ansib…...

F#语言的区块链
F#语言在区块链中的应用 引言 区块链技术在过去十年中迅速崛起,成为了推动金融、供应链、物联网等多个领域创新的重要力量。近年来,随着区块链技术的普及,各种编程语言也纷纷被应用于区块链的开发中。F#语言作为一种功能性编程语言…...

9.RV1126-OPENCV 视频的膨胀和腐蚀
一.膨胀 1.视频流的膨胀流程 之前膨胀都是在图片中进行的,现在要在视频中进行也简单,大概思路就是:获取VI数据,然后把VI数据给Mat化发给VENC模块,然后VENC模块获取,这样就完成了。流程图: 2.代…...

查找 Vue 项目中未使用的依赖
在 Vue 项目中查找未使用的依赖可以通过以下几种方法: 1. 使用 depcheck 工具 depcheck 是一个专门用于查找项目中未使用依赖的工具。 安装: bash npm install -g depcheck使用: bash depcheck它会列出: 未使用的依赖缺失…...

华为OD机考-内存冷热标记-多条件排序
import java.util.*;public class DemoTest5 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseint a in.nextInt();int[] arr new int[a];for(int…...

UDP 与 TCP 调用接口的差异:面试高频问题解析与实战总结
在日常开发中,我们经常使用封装良好的 TCP 协议栈,比如 HTTP 客户端、Moudou 网络库等,因此很少从“裸 API”角度深入了解 TCP 和 UDP 的套接字调用流程。但在一些系统底层开发或者网络编程面试中,常被问到“TCP 和 UDP 的调用流程…...
AI时代:学习永不嫌晚,语言多元共存
最近看到两个关于AI的两个问题,“现在开始学习AI,是不是为时已晚?”、“AI出现以后,翻译几乎已到末路,那么,随着时代的进步,中文会一统全球吗?” 联想到自己正在做的“万能AI盒”小程…...

『React』Fragment的用法及简写形式
在 React 渲染组件时,每个组件只能返回一个根节点(root element)。传统上,如果我们需要渲染多条并列的元素,通常会使用一个多余的 <div> 或者其他容器标签将它们包裹起来。但是,这样会在最终的 HTML …...

强化学习入门:交叉熵方法数学推导
前言 最近想开一个关于强化学习专栏,因为DeepSeek-R1很火,但本人对于LLM连门都没入。因此,只是记录一些类似的读书笔记,内容不深,大多数只是一些概念的东西,数学公式也不会太多,还望读者多多指教…...