低空城市场景下的多无人机任务规划与动态协调!CoordField:无人机任务分配的智能协调场

- 作者:Tengchao Zhang 1 ^{1} 1 , Yonglin Tian 2 ^{2} 2 , Fei Lin 1 ^{1} 1, Jun Huang 1 ^{1} 1, Patrik P. Süli 3 ^{3} 3, Rui Qin 2 , 4 ^{2,4} 2,4, and Fei-Yue Wang 5 , 1 ^{5,1} 5,1
- 单位: 1 ^{1} 1澳门科技大学创新工程学院工程科学系, 2 ^{2} 2中科院自动化研究所多模态人工智能系统国家重点实验室, 3 ^{3} 3匈牙利Óbuda大学, 4 ^{4} 4天津大学复杂管理系统计算与分析实验室, 5 ^{5} 5中国科学院大学中国经济社会研究中心
- 论文标题:CoordField: Coordination Field for Agentic UAV Task Allocation In Low-altitude Urban Scenarios
- 论文链接:https://arxiv.org/pdf/2505.00091
主要贡献
- 提出了 CoordField,这是一种基于协调场的无人机群任务分配方法,通过不断更新的势场来表示城市环境中任务的紧急程度和无人机的影响,增强了实时响应能力。
- 提出了一种无人机群的代理系统,能够从自然语言描述中进行高精度的任务理解,并通过具有不同角色的专门协作代理支持动态规划和部署。
- 在相同任务场景下,将该系统与多个基线模型进行对比评估,验证了其在城市环境中卓越的协调性能。
研究背景
- 随着无人机群在城市环境中执行行人检测、车辆跟踪和交通信号监控等复杂任务的需求不断增加,多无人机系统相较于单无人机在覆盖范围、系统冗余和运行效率方面具有显著优势。
- 然而,任务复杂性的增加和城市环境的高度动态性也带来了巨大挑战。有效的任务分配需要系统能够持续重新分配无人机到新任务,适应无人机故障和任务优先级的变化,并在没有集中控制的情况下实现去中心化的智能协调。
- 现有的优化算法(如灰狼优化算法和鲸鱼优化算法)通常针对特定类型的任务,难以适应在高度动态环境中运行的异构无人机集群。随着大语言模型(LLM)的发展,其强大的语义理解和工具调用能力为解决此类问题提供了新的思路。
- 然而,现有基于LLM的方法在处理复杂、快速变化环境中的多任务时仍存在显著局限性。
- 代理人工智能(Agentic AI)作为一种新兴的灵活且统一的方法,能够更好地应对这些挑战。
基础知识
智能体系统
- 定义与特点:代理人工智能(Agentic AI)是一种新型智能范式,强调自主感知、目标驱动的规划和自适应决策。与传统被动方法不同,Agentic AI注重代理的持续目标追求、上下文记忆、自适应工具使用和自我反思能力。这些能力使代理能够在动态环境中更自主地协调行动。
- 应用场景:在复杂的城市任务场景中,Agentic AI能够帮助无人机理解高级指令,有效分配子任务,并在任务变化或代理故障时快速重新配置协调策略,实现真正的自主协作。
- 理论基础:基于LLM的代理系统在复杂任务分解和顺序执行方面表现出强大的推理和规划能力,为构建自主多无人机系统提供了理论和方法基础。
大语言模型用于自然语言任务解析
- LLM的优势:大语言模型(LLM)在自然语言理解和通用推理方面取得了快速进展,能够处理模糊语义、条件逻辑和空间语言,表现出比传统基于规则的解析器更强的泛化能力。
- 任务生成框架:研究人员开发了多种框架,如Code-as-Policies和Prompt2Action,使LLM能够将自然语言指令映射为可执行的任务代码。这些方法通常结合少样本提示和约束提示,以提高生成输出的有效性和安全性。
- GSCE框架:GSCE框架通过提供指南、技能API、约束和示例,指导LLM生成符合物理约束和操作约束的控制程序,展示了提示工程在无人机任务规划中的实际价值。
基于场的协调与分配
- 场驱动方法:场驱动方法,尤其是人工势场(APF)方法,已被广泛应用于移动机器人领域。该方法将目标点建模为吸引源,障碍物建模为排斥源,机器人通过沿着势场梯度下降来导航,从而实现路径规划和实时避障。
- 交通流建模应用:在交通流建模中,场驱动方法用于模拟交通动态的演变,将车辆建模为受交通密度场、速度场等因素影响的粒子,能够更有效地捕捉宏观和微观变化。
- 研究思路:受此启发,本研究采用类似策略,将任务需求和无人机工作负载建模为连续空间场,通过动态演化的势场引导无人机运动和分配任务。该方法具有去中心化结构、强实时适应性和高响应性,特别适合任务分布不均匀且动态变化的城市场景。
研究方法
语义理解模块
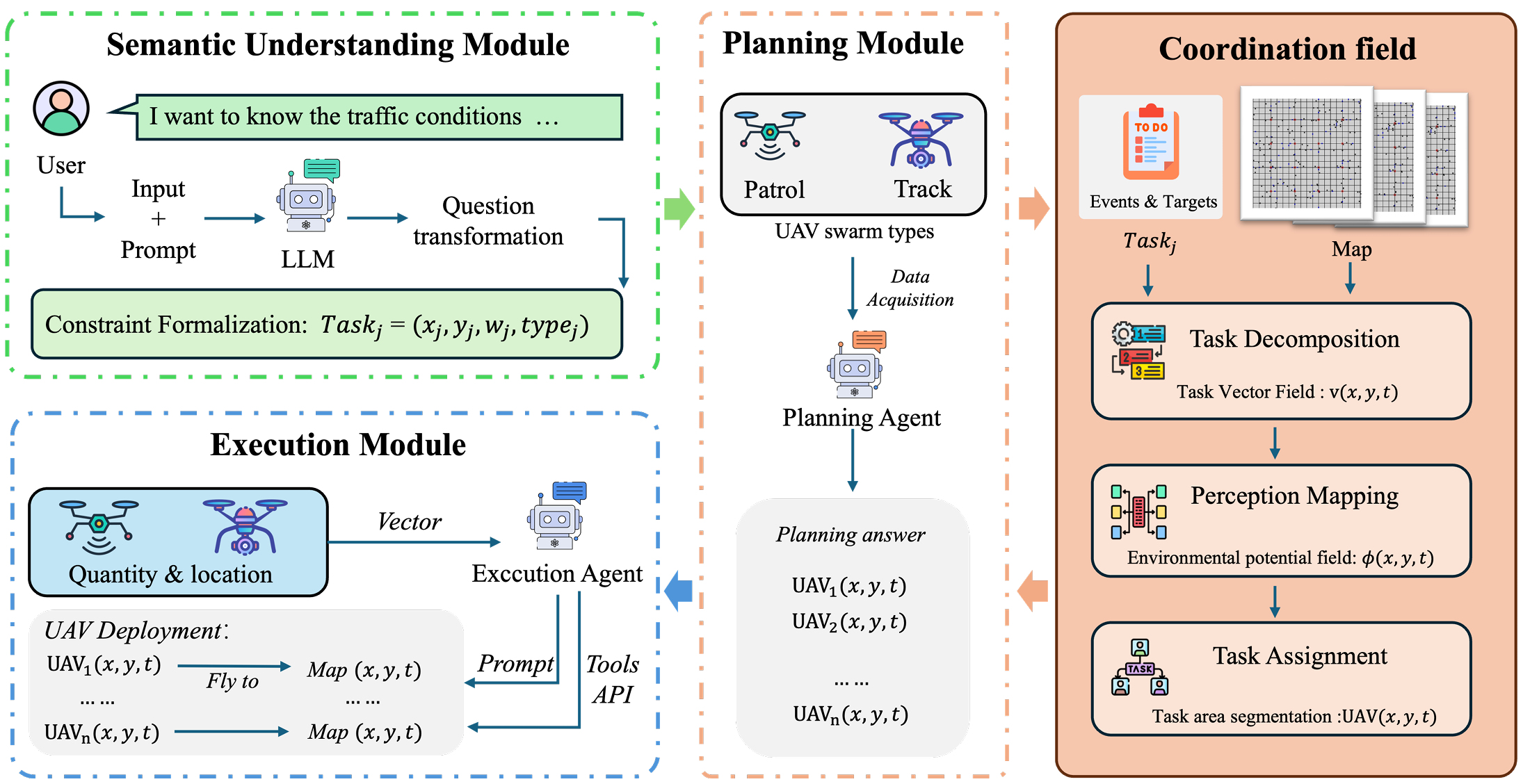
- 功能:该模块负责解释用户提供的自然语言输入,并将其转换为适合下游规划和执行的结构化任务表示。它作为人机交互界面,通过语言命令实现与无人机群的直观交互。
- 任务翻译过程:LLM将模糊或抽象的自然语言指令映射为形式化的约束,提取关键元素(如目标位置、任务类型和优先级),并生成结构化任务元组:
Task j = ( x j , y j , w j , type j ) \text{Task}_j = (x_j, y_j, w_j, \text{type}_j) Taskj=(xj,yj,wj,typej)
其中, ( x j , y j ) (x_j, y_j) (xj,yj) 表示目标的空间坐标, w j w_j wj 表示任务权重或优先级, type j \text{type}_j typej 表示任务的语义类别(如巡逻、跟踪、检查)。
规划模块和协调场
- 规划模块功能:将语义解析得到的任务元组转换为动态的无人机协调策略。规划代理将任务元组和无人机状态数据输入协调场,协调场通过感知映射、任务分解和任务分配三个子模块,以闭环方式适应任务需求和空间分布模式的变化。
- 感知映射:
- 构建时间变化的势场 ϕ ( x , y , t ) \phi(x, y, t) ϕ(x,y,t) 来表示高优先级任务区域的空间强度和分布。该标量场由加权高斯函数的和组成:
ϕ ( x , y , t ) = ∑ j = 1 M w j ( t ) ⋅ exp ( − ∥ ( x , y ) − ( x j ( t ) , y j ( t ) ) ∥ 2 2 σ j 2 ) \phi(x, y, t) = \sum_{j=1}^{M} w_j(t) \cdot \exp\left(-\frac{\|(x, y) - (x_j(t), y_j(t))\|^2}{2\sigma_j^2}\right) ϕ(x,y,t)=j=1∑Mwj(t)⋅exp(−2σj2∥(x,y)−(xj(t),yj(t))∥2)
其中, σ j \sigma_j σj 表示任务 j j j 的空间影响半径。 - 势场在建筑物等障碍物区域内被显式设置为零。
- 构建时间变化的势场 ϕ ( x , y , t ) \phi(x, y, t) ϕ(x,y,t) 来表示高优先级任务区域的空间强度和分布。该标量场由加权高斯函数的和组成:
- 任务分解:
- 构建时间变化的矢量场 v ( x , y , t ) v(x, y, t) v(x,y,t),表示无人机群的运动速度场。基于流体力学的纳维-斯托克斯方程定义运动方程:
d v d t = − 1 ρ ∇ p + ν ∇ 2 v + F task ( ϕ ) \frac{dv}{dt} = -\frac{1}{\rho}\nabla p + \nu \nabla^2 v + F_{\text{task}}(\phi) dtdv=−ρ1∇p+ν∇2v+Ftask(ϕ)
其中, v ( x , y , t ) = ( v x , v y ) v(x, y, t) = (v_x, v_y) v(x,y,t)=(vx,vy) 表示2D空间中每一点的速度向量, ν \nu ν 表示流体粘度, F task = k ∇ ϕ F_{\text{task}} = k \nabla \phi Ftask=k∇ϕ 是用于引导无人机向高势场值区域移动的外力项。 - 扩散项 ν ∇ 2 v \nu \nabla^2 v ν∇2v 有助于防止无人机过度集中在单个区域,增强空间分布和系统鲁棒性。
- 构建时间变化的矢量场 v ( x , y , t ) v(x, y, t) v(x,y,t),表示无人机群的运动速度场。基于流体力学的纳维-斯托克斯方程定义运动方程:
- 任务分配:
- 引入局部涡旋机制,为每个无人机生成一个旋转场,作为动态排斥控制策略。每个无人机 i i i 在当前位置 ( x i , y i ) (x_i, y_i) (xi,yi) 生成一个旋转场:
ω i ( r ) = Γ i 2 π r exp ( − ( r r 0 ) 2 ) \omega_i(r) = \frac{\Gamma_i}{2\pi r} \exp\left(-\left(\frac{r}{r_0}\right)^2\right) ωi(r)=2πrΓiexp(−(r0r)2)
其中, r r r 是从无人机 i i i 的径向距离, r 0 r_0 r0 是场的影响半径, Γ i \Gamma_i Γi 是由无人机的能力分数 c i ( t ) c_i(t) ci(t) 和局部势场值 ϕ ( x i , y i , t ) \phi(x_i, y_i, t) ϕ(xi,yi,t) 决定的循环强度:
Γ i ( t ) = c i ( t ) ⋅ ϕ ( x i ( t ) , y i ( t ) , t ) ∑ j = 1 N c j ( t ) \Gamma_i(t) = \frac{c_i(t) \cdot \phi(x_i(t), y_i(t), t)}{\sum_{j=1}^{N} c_j(t)} Γi(t)=∑j=1Ncj(t)ci(t)⋅ϕ(xi(t),yi(t),t) - 基于该场,系统计算每个无人机的切向速度分量 v θ , i ( r ) v_{\theta,i}(r) vθ,i(r),形成围绕每个无人机的排斥速度,模拟代理间的避碰动态:
v θ , i ( r ) = Γ i 2 π r ( 1 − exp ( − ( r r 0 ) 2 ) ) v_{\theta,i}(r) = \frac{\Gamma_i}{2\pi r} \left(1 - \exp\left(-\left(\frac{r}{r_0}\right)^2\right)\right) vθ,i(r)=2πrΓi(1−exp(−(r0r)2)) - 最终,每个无人机的控制速度向量通过将全局引导速度场 v ( x , y , t ) v(x, y, t) v(x,y,t) 与所有无人机生成的切向排斥速度叠加得到:
v new ( x , y , t ) = v ( x , y , t ) + ∑ i = 1 n v θ , i ( x , y , t ) v_{\text{new}}(x, y, t) = v(x, y, t) + \sum_{i=1}^{n} v_{\theta,i}(x, y, t) vnew(x,y,t)=v(x,y,t)+i=1∑nvθ,i(x,y,t)
该机制确保无人机不仅被引导到高优先级任务区域,还通过局部涡旋效应相互排斥,从而在完全去中心化的设置中实现动态稳定的任务分配和协调行为。
- 引入局部涡旋机制,为每个无人机生成一个旋转场,作为动态排斥控制策略。每个无人机 i i i 在当前位置 ( x i , y i ) (x_i, y_i) (xi,yi) 生成一个旋转场:
执行模块
- 核心任务:将规划模块的输出(包括流场矢量 v new ( x , y , t ) v_{\text{new}}(x, y, t) vnew(x,y,t) 和无人机任务分配信息)转换为物理或模拟无人机可执行的实时控制命令。
- 执行过程:
- 执行代理通过标准化API接口(如MAVSDK、ROS2或AirSim)与底层控制系统通信。
- 在任务执行阶段,每架无人机根据当前位置 ( x , y , t ) (x, y, t) (x,y,t) 从预计算的控制场 v new ( x , y , t ) v_{\text{new}}(x, y, t) vnew(x,y,t) 中采样局部速度向量,并将其用作下一个导航方向。
- 执行代理根据任务类型生成飞行控制命令,并将其发送到无人机平台。
- 无人机在动态环境中持续报告其状态(包括位置、速度和执行状态),用于实时刷新任务势场 ϕ ( x , y , t ) \phi(x, y, t) ϕ(x,y,t) 和流场矢量 v ( x , y , t ) v(x, y, t) v(x,y,t)。
- 当环境发生变化(如出现新任务目标、完成当前任务或引入障碍物)时,系统重新计算相关场,并通过执行代理提供更新的控制指令。
- 闭环机制:感知-规划-执行循环以高频率运行,确保系统表现出强大的响应能力和去中心化的动态协调能力。无人机能够在复杂多变的环境中重新规划、协同避障和目标适应,实现真正的自适应智能行为。
实验
环境和无人机配置
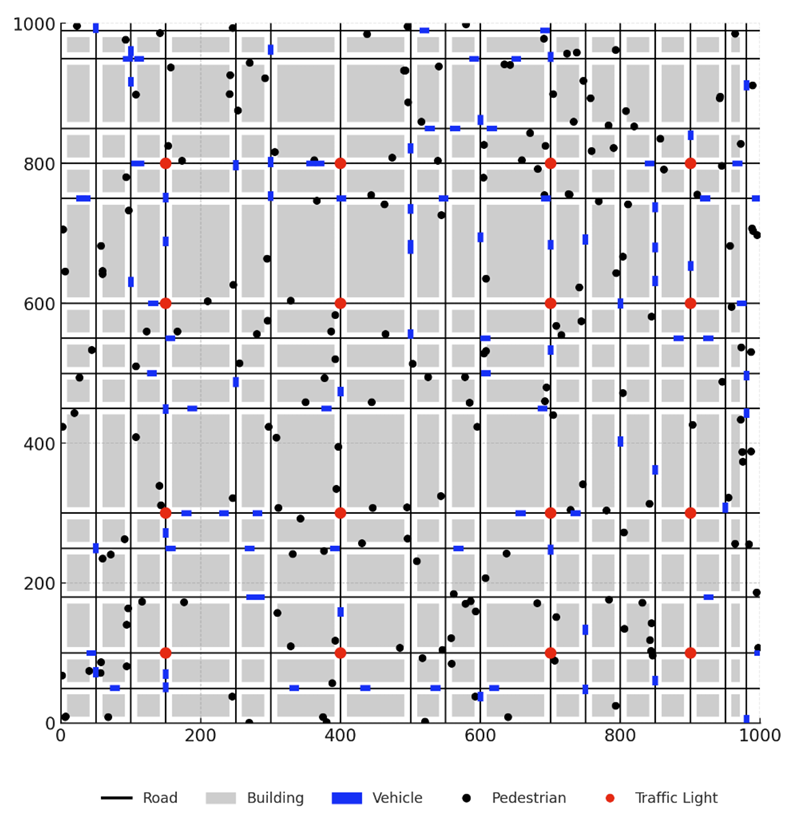
- 模拟环境:实验在一个定制的二维城市模拟环境中进行,覆盖1000×1000网格空间,包含城市道路网络、建筑物、交通信号灯、行人和车辆。
- 无人机配置:共部署20架无人机,分为巡逻无人机和跟踪无人机两种类型,每种10架。两种类型的无人机具有相同的飞行性能,但在感知和识别能力上有所不同。
- 任务指令:任务指令通过自然语言输入,例如“请检查人群和车辆”,通过DeepSeek API解析为结构化任务信息。
实验结果与分析
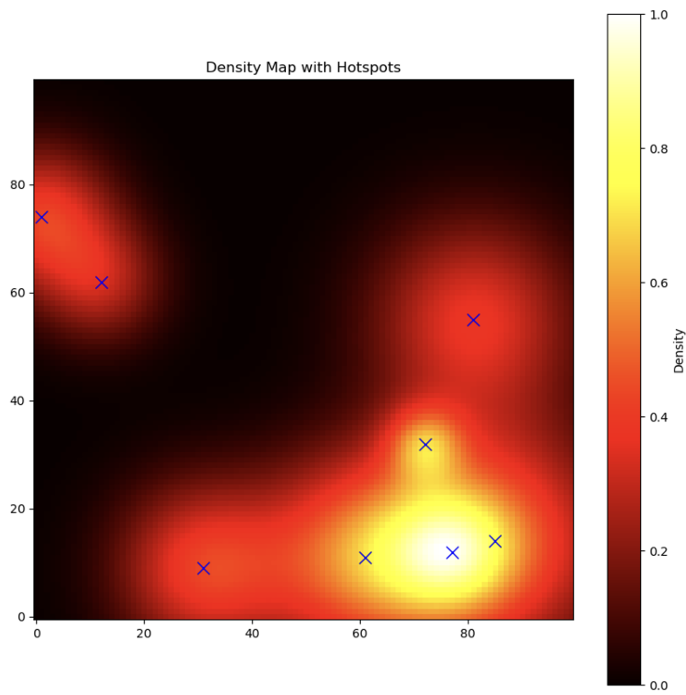
- 任务密度分布:通过热力图展示了城市环境中任务密度的分布情况,红色和黄色区域表示任务热点区域,系统能够动态地重新分配无人机资源以应对这些高需求区域。
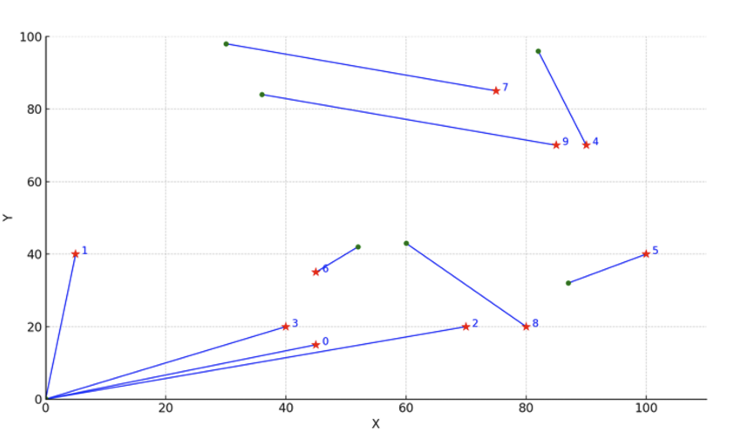
- 无人机轨迹优化:展示了优化后的无人机轨迹,每条蓝色轨迹连接起点(绿色三角形)和任务目标(红色圆圈),表明系统能够基于最小旅行距离进行全局路径优化,同时避免拥堵和冲突。
- 性能评估指标:
- 任务解析准确率(TPA):衡量自然语言指令正确解析为结构化任务表示的比例。该系统达到了96%的最高TPA,显著优于其他基线模型。
- 覆盖效率(CE):量化无人机有效覆盖任务定义区域的程度。该系统平均覆盖效率为95%,在任务突发场景下仍能保持超过80%的有效覆盖。
- 任务负载平衡(TLB):评估任务负载在所有无人机之间的分布均匀性。该系统展示了最低的任务分配密度梯度范数,仅为0.8,显著降低了资源聚集,增强了空间协调性。
- 无人机利用率(UUR):表示参与任务执行的无人机比例。该系统达到了97%的最高利用率,表明大多数无人机始终保持活跃状态。
- 对比结果:如下表所示,该系统在多个关键性能指标上均优于Deepseek-v3、GPT-4o、Claude-3-7-Sonnet、LLaMA-4-Scout和Gemini-2.5-Pro等基线模型。
| 模型 | TPA | CE | TLB | UUR |
|---|---|---|---|---|
| Our method | 96% | 95% | 0.8 | 97% |
| Deepseek-v3 | 70% | 78% | 2.1 | 85% |
| GPT-4o | 74% | 85% | 1.5 | 82% |
| Claude-3-7-Sonnet | 76% | 80% | 1.6 | 84% |
| LLaMA-4-Scout | 72% | 79% | 1.9 | 83% |
| Gemini-2.5-Pro | 73% | 81% | 1.7 | 84% |
结论与未来工作
- 结论:
- 该论文提出的协调场代理系统在复杂动态的城市环境中展示了高效率、稳定性和适应性,能够实时解析自然语言指令并通过协调场引导实现高效的任务分配。实验结果验证了其优越性能。
- 未来工作:
- 未来的工作计划将系统扩展到三维场景和真实世界的无人机群中。

相关文章:
低空城市场景下的多无人机任务规划与动态协调!CoordField:无人机任务分配的智能协调场
作者:Tengchao Zhang 1 ^{1} 1 , Yonglin Tian 2 ^{2} 2 , Fei Lin 1 ^{1} 1, Jun Huang 1 ^{1} 1, Patrik P. Sli 3 ^{3} 3, Rui Qin 2 , 4 ^{2,4} 2,4, and Fei-Yue Wang 5 , 1 ^{5,1} 5,1单位: 1 ^{1} 1澳门科技大学创新工程学院工程科学系࿰…...
算法-构造题
#include<iostream> #include<bits/stdc.h> using namespace std; typedef long long ll; const ll N 5e5 10; int main() {ll n, k;cin >> n >> k; ll a[N] {0}; // 初始化一个大小为N的数组a,用于存储排列// 构造满足条件的排列for (l…...

Go 并发编程深度指南
Go 并发编程深度指南 Go 语言以其内置的并发原语而闻名,通过 goroutine 和 channel 提供了一种高效、安全的并发编程模型。本文将全面解析 Go 的并发机制及其实际应用。 核心概念:Goroutines 和 Channels 1. Goroutines (协程) Go 的轻量级线程实现&…...

PostgreSQL 的扩展pg_freespacemap
PostgreSQL 的扩展pg_freespacemap pg_freespacemap 是 PostgreSQL 提供的一个内置扩展,用于查看表的空闲空间映射(Free Space Map, FSM)信息。这个扩展对于数据库性能调优和空间管理非常有用。 一 扩展概述 功能:提供对表的空…...
【Linux】进程的基本概念
目录 概念描述进程-PCB如何查看进程通过系统目录进行查看通过ps指令进行查看 通过系统调用获取进程的PID和PPID(进程标⽰符)通过系统调用创建子进程通过一段代码来介绍fork为什么要有子进程?fork为什么给子进程返回0,给父进程返回子进程的PIDfork函数到底…...
设备驱动与文件系统:05 文件使用磁盘的实现
从文件使用磁盘的实现逻辑分享 我们现在讲第30讲,内容是文件使用磁盘的具体实现,也就是相关代码是如何编写的。上一节我们探讨了如何从字符流位置算出盘块号,这是文件操作磁盘的核心。而这节课,我们将深入研究实现这一核心功能的…...
AI数据分析在体育中的应用:技术与实践
在现代体育竞技领域,"数据驱动"已不再是一个遥远的概念。尤其随着人工智能(AI)和大数据分析的不断成熟,从职业俱乐部到赛事直播平台,从运动员训练到球迷观赛体验,AI正以前所未有的方式渗透并改变…...
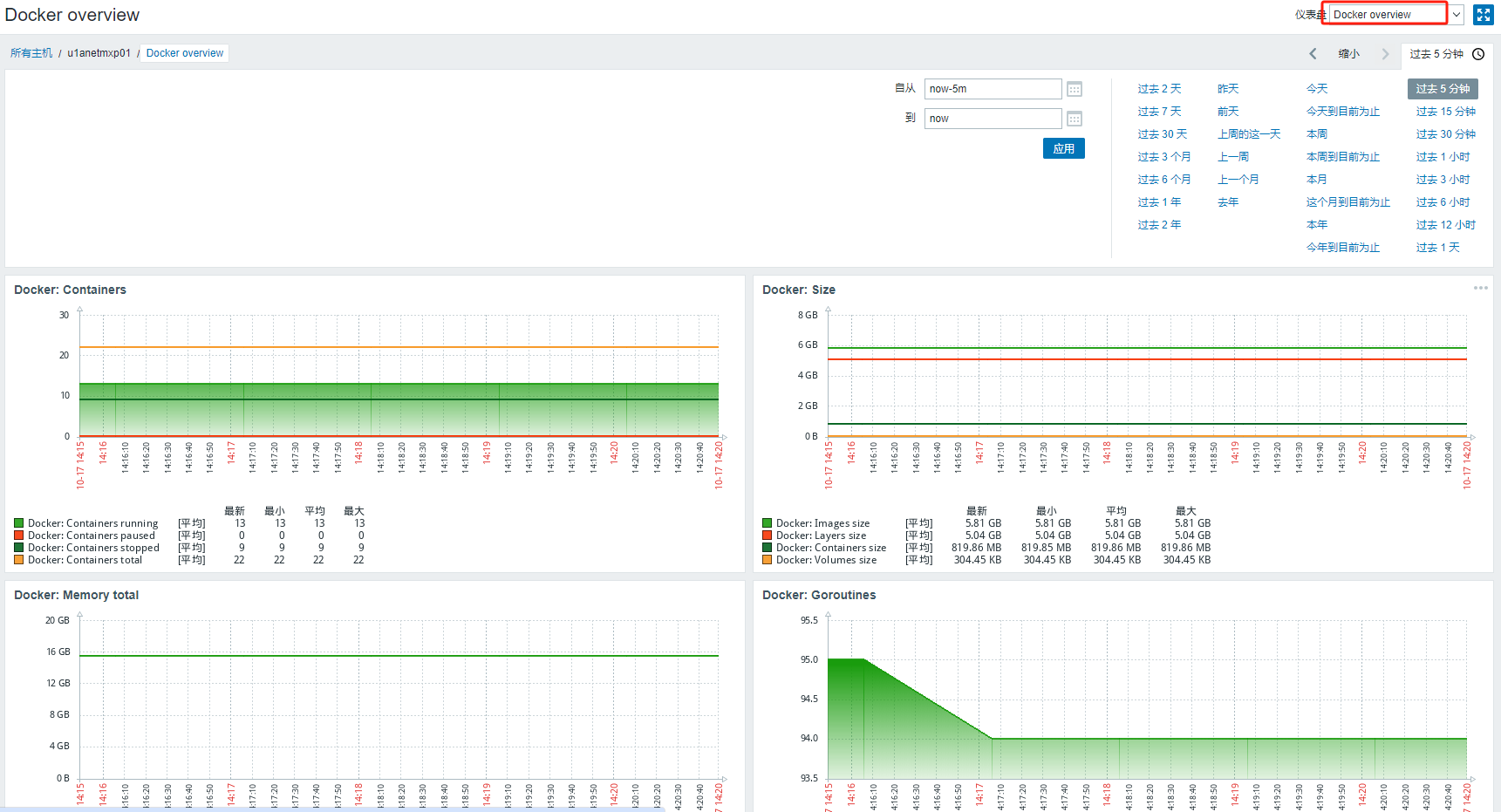
zabbix 6 监控 docker 容器
zabbix 6 监控 docker 容器 1.安装zabbix_agent2 curl -s http://10.26.211.56:8080/centos7-agent2-install.sh | bash2.在zabbix server 端测试 zabbix_get -s 10.26.219.180 -k docker.infoZBX_NOTSUPPORTED: Cannot fetch data: Get "http://1.28/info": dial…...
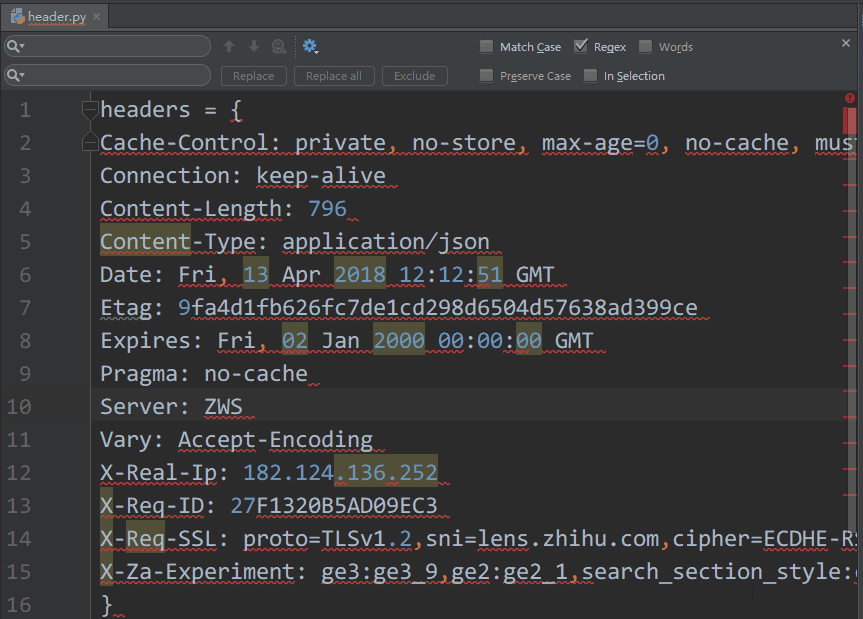
正则持续学习呀
源匹配为 (.*): (.*)$ 替换匹配为 "$1": "$2", 可将headers改为字典 参考 【爬虫军火库】如何优雅地复制请求头 - 知乎...

【Go语言基础【19】】接口:灵活实现多态的核心机制
文章目录 零、概述一、接口基础1、接口的基本概念a. 接口定义b. 类型实现接口(无需显式声明)c. 接口变量(体现了多态) 2、实现接口的方式3、接口组合4、接口的底层结构 二、空接口与类型断言1. 空接口(interface{}&…...
)
MySql读写分离部署(一主一从,双主双从,Mycat)
参考资料: 参考视频 参考博客 视频参考资料及安装包: https://pan.baidu.com/s/1xT_WokN_xlRv0h06b6F3yg 提取码: aag3 Mysql主从复制部署指南(一主一从) NotePad++编辑Linux服务器文档 Mysql高版本(8.0及以后)Linux安装 Mysql分库分表(基于Mycat)的基本部署 …...
Go基本语法——go语言中的四种变量定义方法
前言 在go语言中,定义一个变量有四种方式,本文单从语法的层面来介绍这几种方式 单变量定义方法 1.var 变量名 类型,不进行初始化 例如,定义一个变量a后为其赋值,并且打印其值,运行结果如下 //1.不进行…...
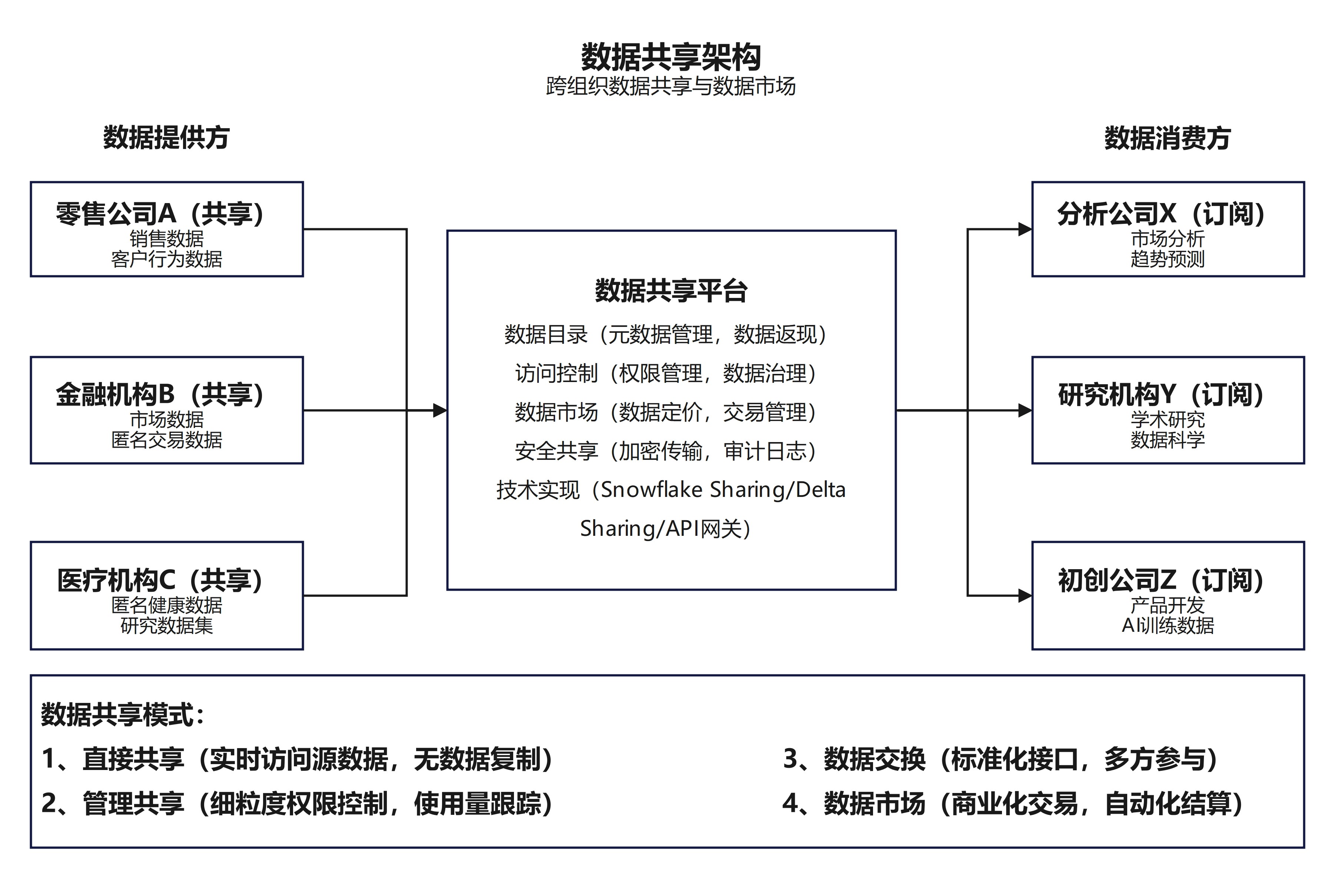
27.【新型数据架构】-数据共享架构
27.【新型数据架构】-数据共享架构:降低数据获取成本,实时数据访问,保持数据新鲜度,促进数据经济发展,打破数据孤岛,标准化数据交换,增强数据安全性,完整审计追踪,合规性保障 一、数据共享架构的本质:打破壁垒的“数字立交桥” 传统企业或组织间的数据往往呈现“烟囱…...
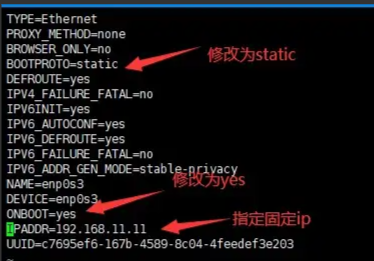
virtualbox 如何虚拟机ip固定
1、在网络管理里新建 2、配置网络 3、 进入linux系统,查看 查看 网卡是enp0s8, ifconfig 4、进入网卡配置文件 cd /etc/sysconfig/network-scripts如果没有enp0s8 ,则使用mv ifcfg-enp0s3 ifcfg-enp0s8命令 配置项如下 TYPEEthernet PROXY_METHODn…...
RKNN3588上部署 RTDETRV2
RT-DETR V2 是由百度研究团队在 2024年 提出的,是其广受好评的实时目标检测模型 RT-DETR 的重大升级版本。它继承了第一代 RT-DETR 利用 Transformer 架构实现端到端目标检测 和 卓越实时性能 的核心优势,并针对模型精度、训练效率和部署灵活性进行了全方…...
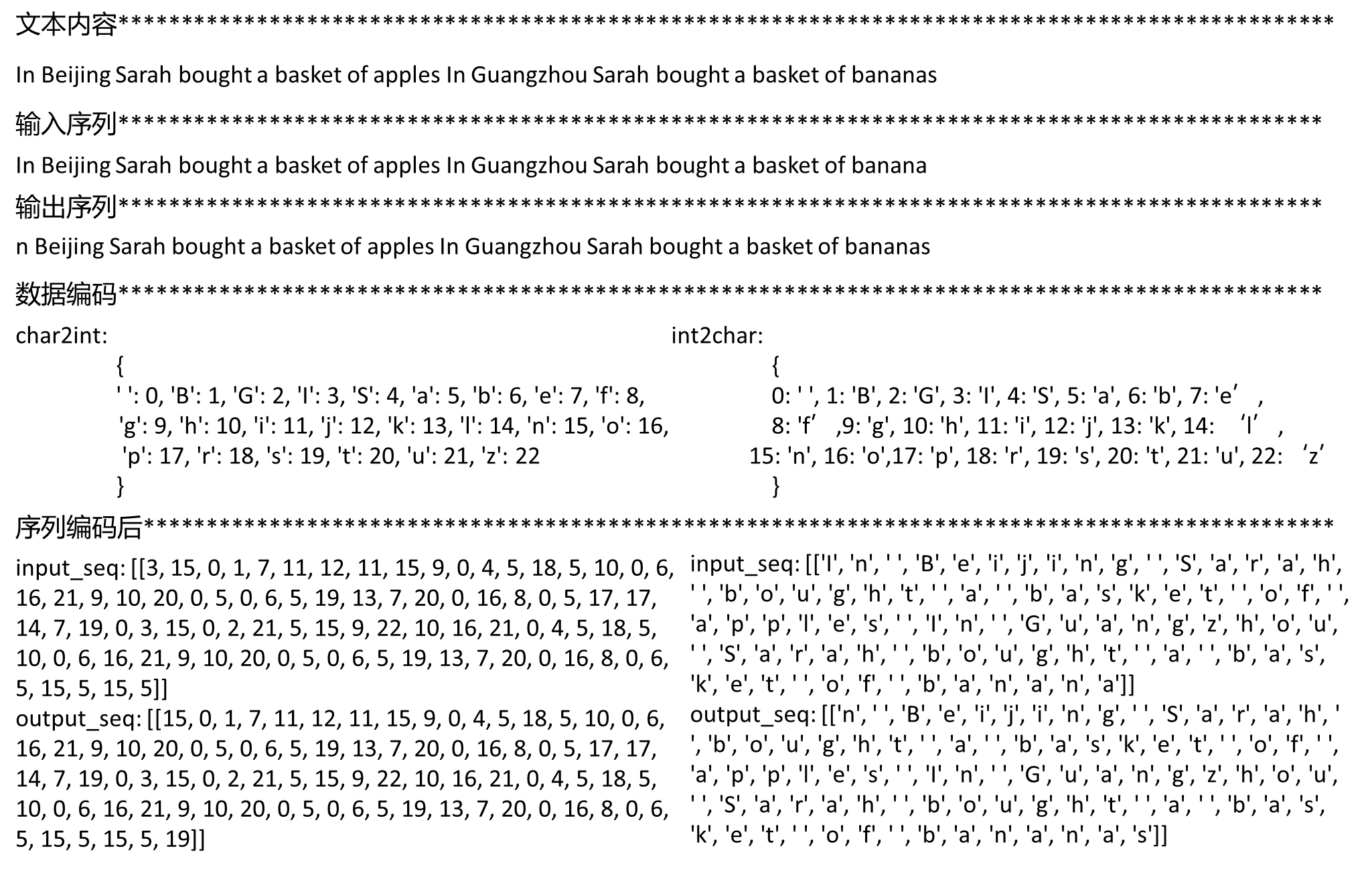
Python----循环神经网络(BiLSTM:双向长短时记忆网络)
一、LSTM 与 BiLSTM对比 1.1、LSTM LSTM(长短期记忆网络) 是一种改进的循环神经网络(RNN),专门解决传统RNN难以学习长期依赖的问题。它通过遗忘门、输入门和输出门来控制信息的流动,保留重要信息并丢弃无关…...
)
Elasticsearch 常用操作命令整合 (cURL 版本)
Elasticsearch 常用操作命令整合 (cURL 版本) 集群管理 查看集群健康状态 curl -X GET "localhost:9200/_cluster/health?pretty"查看节点信息 curl -X GET "localhost:9200/_cat/nodes?v"查看集群统计信息 curl -X GET "localhost:9200/_clus…...

Redis持久化策略:RDB与AOF详解
目录 1. RDB持久化工作原理触发机制优点缺点配置示例 2. AOF持久化工作原理同步策略重写机制优点缺点配置示例 3. RDB与AOF比较4. 混合持久化(Redis 4.0)5. 选择建议 Redis提供了两种主要的持久化机制来保证数据安全:RDB(Redis Database)和AOF(Append Only File)。本…...
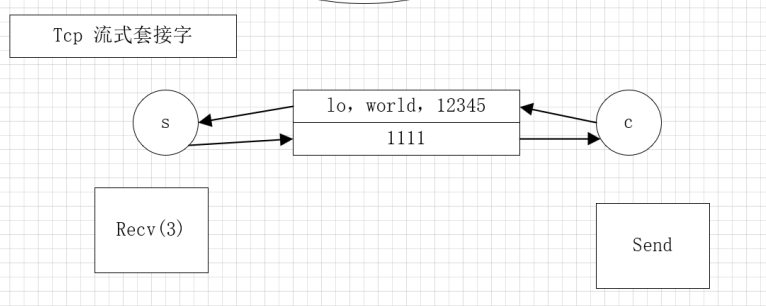
Linux系统编程-DAY10(TCP操作)
一、网络模型 1、服务器/客户端模型 (1)C/S:client server (2)B/S:browser server (3)P2P:peer to peer 2、C/S与B/S区别 (1)客户端不同&#…...
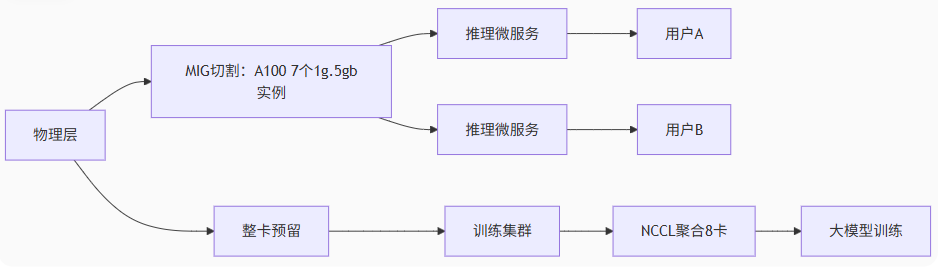
GPU虚拟化
引言 现有如下环境(注意相关配置:只有一个k8s节点,且该节点上只有一张GPU卡): // k8s版本 $ kubectl version Client Version: version.Info{Major:"1", Minor:"22", GitVersion:"v1.22.7&…...
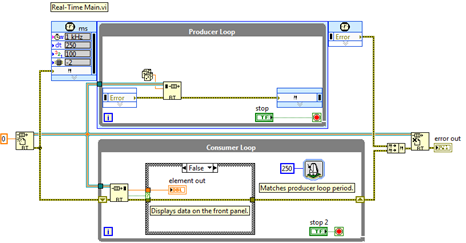
LabVIEW工业级多任务实时测控系统
采用LabVIEW构建了一套适用于工业自动化领域的多任务实时测控系统。系统采用分布式架构,集成高精度数据采集、实时控制、网络通信及远程监控等功能,通过硬件与软件的深度协同,实现对工业现场多类型信号的精准测控,展现 LabVIEW 在…...
 ----- Python起源)
Python学习(7) ----- Python起源
🐍《Python 的诞生》:一段圣诞假期的奇妙冒险 📍时间:1989 年圣诞节 在荷兰阿姆斯特丹的一个寒冷冬夜,灯光昏黄、窗外飘着雪。一个程序员 Guido van Rossum 正窝在家里度假——没有会议、没有项目、没有 bug…...

Java中List的forEach用法详解
在 Java 中,List.forEach() 是 Java 8 引入的一种简洁的遍历集合元素的方法。它基于函数式编程思想,接受一个 Consumer 函数式接口作为参数,用于对集合中的每个元素执行操作。 基本语法 java 复制 下载 list.forEach(consumer); 使用示…...

LeetCode 1356.根据数字二进制下1的数目排序
题目: 给你一个整数数组 arr 。请你将数组中的元素按照其二进制表示中数字 1 的数目升序排序。 如果存在多个数字二进制中 1 的数目相同,则必须将它们按照数值大小升序排列。 请你返回排序后的数组。 提示: 1 < arr.length < 5000…...

破解HTTP无状态:基于Java的Session与Cookie协同工作指南
HTTP协议自身是属于“无状态”协议 无状态是指:默认情况下,HTTP协议的客户端和服务器之间的这次通信,和下次通信之间没有直接的关系 但在实际开发中,我们很多时候是需要知道请求之间的关联关系的 上述图中的令牌,通常就…...
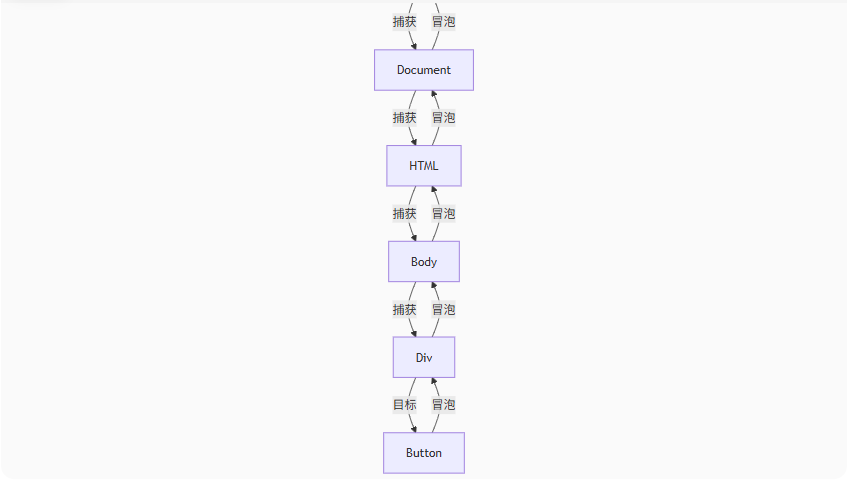
JS 事件流机制详解:冒泡、捕获与完整事件流
JS 事件流机制详解:冒泡、捕获与完整事件流 文章目录 JS 事件流机制详解:冒泡、捕获与完整事件流一、DOM 事件流基本概念二、事件捕获 (Event Capturing)特点代码示例 三、事件冒泡 (Event Bubbling)特点代码示例 四、完整事件流示例HTML 结构JavaScript…...

MYSQL too many connection问题排查和修复
1.连接数据库 mysql -u root -p 1.1 查看mysql路径 如果没有配置mysql的环境变量,可以直接找mysql的安装目录 打开任务管理器-》服务-》Mysql(根据版本不同后面带有数字,找运行的那个) 打开服务->mysql->属性-》可执行文件的路径,…...

SpringCloudAlibaba和SpringBoot版本问题
SpringCloudAlibaba和SpringBoot版本问题 直接参考官方给出的版本说明,具体地址:https://github.com/alibaba/spring-cloud-alibaba/wiki/%E7%89%88%E6%9C%AC%E8%AF%B4%E6%98%8E Spring Cloud Alibaba VersionSentinel VersionNacos VersionRocketMQ Ver…...
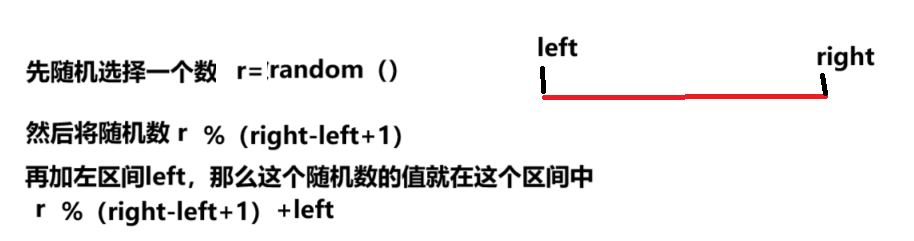
算法专题七:分治
快排 1.颜色分类 题目链接:75. 颜色分类 - 力扣(LeetCode) class Solution {public void swap(int[] nums, int i, int j){int t = nums[i];nums[i] = nums[j];nums[j] = t;}public void sortColors(int[] nums) {int left=-1 ,i=0 ,right=nums.length;while(i<right){i…...
Vue中虚拟DOM的原理与作用
绪论 首先我们先了解,DOM(Document Object Model,文档对象模型) 是浏览器对 HTML/XML 文档的结构化表示,它将文档解析为一个由节点(Node)和对象组成的树形结构(称为 DOM 树…...