让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数估计产生显著偏差。本文通过实证研究,系统比较了MSE损失函数和Cauchy损失函数在线性回归中的表现,重点分析了两种损失函数在噪声数据环境下的差异。研究结果表明,Cauchy损失函数通过其对数惩罚机制有效降低了异常值的影响,在处理含噪声数据时展现出更强的稳定性。
理论基础
均方误差(MSE)损失函数
均方误差损失函数是回归问题中最为常用的损失函数,其数学定义为:

MSE损失函数的优势在于其良好的数学性质。首先,MSE函数处处可微,便于使用基于梯度的优化算法进行参数更新。其次,平方项的引入确保了较大误差获得相应的高权重,驱动模型向更高精度的方向优化。此外,MSE损失函数具有凸函数性质,保证了优化过程能够收敛到全局最优解。
然而,MSE损失函数的主要局限性在于其对异常值的高度敏感性。由于采用二次惩罚机制,远离回归线的数据点会产生较大的平方误差,从而在损失函数中占据主导地位。这种特性使得模型参数估计容易被异常值所"拖拽",偏离真实的数据分布特征,特别是在处理包含噪声或异常值的实际数据时表现尤为明显。
Cauchy损失函数
Cauchy损失函数属于鲁棒性损失函数家族,其设计目标是降低模型对异常值的敏感性。该损失函数基于Cauchy分布(也称为Lorentz分布)的概率密度函数,其数学表达式为:

其中,δ为尺度参数,控制损失函数的形状和对异常值的容忍度。
Cauchy损失函数的核心优势在于其对数惩罚机制。与MSE的二次增长不同,Cauchy损失函数在残差增大时呈现对数增长特性,这意味着大残差虽然仍会受到惩罚,但其影响程度相对有限。这种特性使得模型在面对异常值时能够保持相对稳定的参数估计,避免被极端值过度影响。
参数δ的选择对Cauchy损失函数的性能具有重要影响。较小的δ值使得损失函数对残差变化更为敏感,而较大的δ值则增强了模型对异常值的容忍度。在实际应用中,δ值通常需要根据数据特性和问题需求进行调整。
实验设计与实现
本节详细介绍了MSE和Cauchy损失函数在线性回归中的实现过程。所有实验均在Google Colab环境中执行,为交互式编程和结果可视化提供了便利的平台。
实验环境配置
实验开始前,需要导入必要的Python库以支持数值计算、优化求解和数据可视化功能:
importnumpyasnp importmatplotlib.pyplotasplt fromscipy.optimizeimportminimize fromabcimportABC, abstractmethod fromsklearn.metricsimportmean_squared_error, mean_absolute_error
各库的具体功能如下:numpy作为Python科学计算的基础库,负责数组操作、数值计算和合成数据生成;matplotlib.pyplot提供数据可视化功能,用于绘制数据分布、回归拟合结果和损失函数曲面;scipy.optimize.minimize实现数值优化功能,支持多种优化算法的参数估计;abc模块提供抽象基类功能,用于构建统一的回归模型接口;sklearn.metrics提供标准化的模型评估指标。
噪声数据生成器设计
为了系统评估不同损失函数的性能,设计了一个综合的数据生成器,能够模拟包含高斯噪声和异常值的线性关系数据:
classDataGenerator: def__init__(self, n_samples=100, noise_std=1.0, outlier_fraction=0.1, outlier_magnitude=20.0, seed=None): self.n_samples=n_samples self.noise_std=noise_std self.outlier_fraction=outlier_fraction self.outlier_magnitude=outlier_magnitude self.seed=seed # 随机种子,用于可复现性self.X=None self.y=None self.true_a=None # 真实的 a 值self.true_b=None # 真实的 b 值defgenerate_data(self, a=2.0, b=5.0): ifself.seedisnotNone: np.random.seed(self.seed) self.true_a=a self.true_b=b self.X=np.random.uniform(-10, 10, self.n_samples) # 在 [-10, 10] 范围内生成 Xnoise=np.random.normal(0, self.noise_std, self.n_samples) # 生成高斯噪声self.y=a*self.X+b+noise # 根据线性模型 y = aX + b + noise 计算 yreturnself.X, self.y defadd_outliers(self): n_outliers=int(self.n_samples*self.outlier_fraction) # 计算异常点数量indices=np.random.choice(self.n_samples, size=n_outliers, replace=False) # 随机选择异常点索引self.y[indices] +=np.random.choice([-1, 1], size=n_outliers) *self.outlier_magnitude # 添加异常值returnindices # 返回异常点的索引,用于可视化defplot_data(self, outlier_indices=None): plt.figure(figsize=(8, 5)) plt.scatter(self.X, self.y, label="Data", alpha=0.7) # 绘制数据点ifoutlier_indicesisnotNone: plt.scatter(self.X[outlier_indices], self.y[outlier_indices], color="red", label="Outliers", s=80, edgecolors='black') # 标记异常点plt.title("Generated Data with Outliers") plt.xlabel("X") plt.ylabel("y") plt.grid(True) plt.legend() plt.tight_layout() plt.show()
DataGenerator类采用模块化设计,支持灵活的参数配置。初始化方法定义了样本数量、噪声标准差、异常值比例、异常值幅度以及随机种子等关键参数。generate_data方法在指定范围内生成均匀分布的输入变量X,并根据预设的线性关系y = aX + b添加高斯噪声生成目标变量y。add_outliers方法通过随机选择部分数据点并施加大幅度扰动来模拟异常值,为评估模型鲁棒性提供了可控的测试环境。plot_data方法实现数据可视化,异常值通过红色标记进行突出显示。
合成数据集构建
基于DataGenerator类,构建包含噪声和异常值的合成数据集:
generator=DataGenerator( n_samples=100, noise_std=2, outlier_fraction=0.1, outlier_magnitude=25, seed=42
) X, y=generator.generate_data(a=2.5, b=1.0)
outlier_indices=generator.add_outliers() generator.plot_data(outlier_indices)
数据集配置参数经过精心设计:样本总数设为100,在保证统计意义的同时保持计算效率;高斯噪声标准差设为2.0,模拟实际测量中的随机误差;异常值比例设为10%,符合实际数据中异常值的典型分布;异常值幅度设为±25,确保异常值与正常数据点存在显著差异。潜在的线性关系定义为y = 2.5x + 1.0,为后续的参数估计提供了明确的基准。
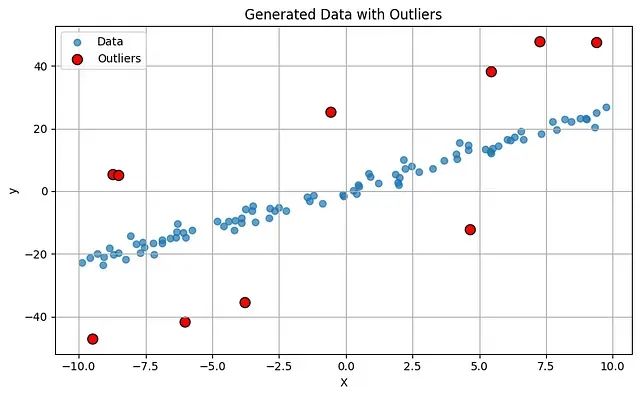
生成的数据可视化结果清晰展示了数据的结构特征:大部分数据点呈现明显的线性趋势,而少数红色标记的异常值显著偏离主要分布,为评估不同损失函数的鲁棒性提供了理想的测试环境。
回归模型框架设计
为了便于不同损失函数的实现和比较,设计了基于抽象基类的回归模型框架:
classBaseRegressor(ABC): def__init__(self): self.coef_=None # [a, b] → y = ax + b 回归系数@abstractmethod defloss_function(self, params, X, y): # 抽象损失函数pass deffit(self, X, y, initial_guess=[1.0, 0.0]): # 拟合方法X=np.array(X) y=np.array(y) ifX.ndim==1: X=X.reshape(-1) result=minimize( fun=self.loss_function, # 目标函数x0=initial_guess, # 初始猜测值args=(X, y), # 传递给目标函数的额外参数method='L-BFGS-B' # 优化算法) self.coef_=result.x # 存储优化后的系数returnself defpredict(self, X): # 预测方法a, b=self.coef_ returna*X+b
BaseRegressor抽象基类为不同损失函数的回归模型提供了统一的接口。该类定义了loss_function抽象方法,强制子类实现特定的损失函数计算逻辑。fit方法采用SciPy的minimize函数实现参数优化,使用L-BFGS-B算法求解线性回归方程y = ax + b中的斜率a和截距b。predict方法基于训练得到的参数进行预测计算。这种设计模式确保了不同损失函数实现之间的一致性和可比性。
MSE回归器实现
基于BaseRegressor框架,实现使用均方误差损失的回归模型:
classMSERegressor(BaseRegressor): defloss_function(self, params, X, y): a, b=params y_pred=a*X+b returnnp.mean((y-y_pred) **2) # 计算均方误差
MSERegressor类继承自BaseRegressor并实现了loss_function抽象方法。该方法根据当前参数计算预测值,然后计算真实值与预测值之间平方误差的均值,体现了MSE损失函数的核心特征。
Cauchy回归器实现
为了解决MSE对异常值敏感的问题,实现基于Cauchy损失的鲁棒回归模型:
classCauchyRegressor(BaseRegressor): def__init__(self, delta=1.0): super().__init__() self.delta=delta # 柯西损失的参数 deltadefloss_function(self, params, X, y): a, b=params y_pred=a*X+b residual=y-y_pred # 计算残差delta=self.delta returnnp.mean(delta**2*np.log(1+ (residual/delta)**2)) # 计算柯西损失
CauchyRegressor类在BaseRegressor基础上引入了尺度参数delta,该参数控制Cauchy损失函数对大残差的敏感程度。损失函数实现遵循Cauchy分布的数学形式,通过对数变换实现对异常值的鲁棒性处理。较小的delta值增强对残差变化的敏感性,而较大的delta值则提升对异常值的容忍度。
实验结果与分析
MSE回归器训练结果
使用合成数据集对MSE回归器进行训练:
mse_model=MSERegressor() mse_model.fit(X, y) y_pred_mse=mse_model.predict(X) print("coefficient:", mse_model.coef_)
训练完成后,MSE回归器的参数估计结果为:斜率a ≈ 2.5976,截距b ≈ 1.5560。

对比真实参数(a=2.5, b=1.0),可以观察到MSE模型的参数估计存在一定偏差,特别是截距b的估计偏差较为明显。这种偏差主要源于异常值对MSE损失函数的显著影响,异常值的大残差被二次放大,导致模型参数向异常值方向偏移。
Cauchy回归器训练结果
使用相同数据集对Cauchy回归器进行训练:
cauchy_model=CauchyRegressor(delta=1.0) cauchy_model.fit(X, y) y_pred_cauchy=cauchy_model.predict(X) print("coefficient:", cauchy_model.coef_)
Cauchy回归器的参数估计结果为:斜率a ≈ 2.4411,截距b ≈ 1.0254。

相比MSE回归器,Cauchy回归器的参数估计更接近真实值,特别是截距b的估计精度显著提升。这一结果验证了Cauchy损失函数在抑制异常值影响方面的有效性,通过其对数惩罚机制成功降低了异常值对参数估计的干扰。
回归拟合效果比较
为了直观比较两种回归方法的拟合效果,将MSE和Cauchy回归线与原始数据同时展示:
plt.figure(figsize=(8,5))
plt.scatter(X, y, label='Data', alpha=0.5) # 绘制原始数据点
plt.plot(X, y_pred_mse, color='blue', label='MSE Fit', linewidth=2) # 绘制 MSE 拟合线
plt.plot(X, y_pred_cauchy, color='green', label='Cauchy Fit', linewidth=2) # 绘制柯西拟合线
plt.title("MSE vs Cauchy")
plt.xlabel("X")
plt.ylabel("y")
plt.legend()
plt.grid(True)
plt.tight_layout() plt.show()
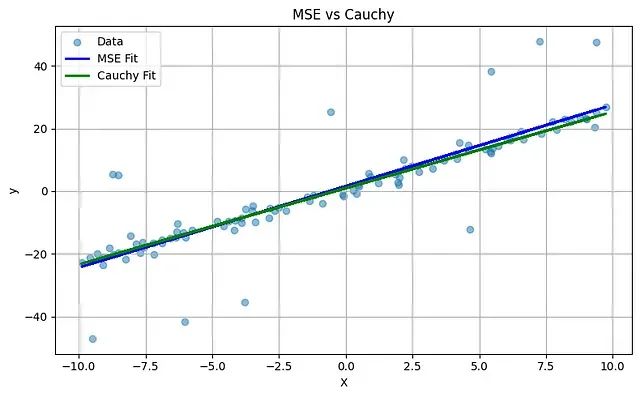
可视化结果清晰展现了两种方法的差异:MSE回归线(蓝色)明显受到异常值的影响,其走向被拉向极端数据点,偏离了数据的主要线性趋势。相比之下,Cauchy回归线(绿色)表现出更强的稳定性,能够更好地捕捉数据的核心分布特征,有效抵抗异常值的干扰。这种差异体现了Cauchy损失函数在处理含噪声数据时的优越性。
损失函数曲面分析
为了深入理解两种损失函数的优化特性,构建参数空间内的损失曲面可视化:
defplot_loss_surface(X, y, model_class, name="Loss Surface", delta=1.0, a_range=(-1, 6), b_range=(-5, 5), steps=100): a_vals=np.linspace(*a_range, steps) # a 值的范围b_vals=np.linspace(*b_range, steps) # b 值的范围A, B=np.meshgrid(a_vals, b_vals) # 创建网格Loss=np.zeros_like(A) # 初始化损失矩阵foriinrange(steps): forjinrange(steps): a=A[i, j] b=B[i, j] # 根据模型类型实例化模型model=model_class(delta=delta) ifmodel_class==CauchyRegressorelsemodel_class() loss=model.loss_function([a, b], X, y) # 计算损失Loss[i, j] =loss fig=plt.figure(figsize=(10, 6)) ax=fig.add_subplot(111, projection='3d') # 创建 3D 子图ax.plot_surface(A, B, Loss, cmap='viridis', alpha=0.9, edgecolor='none') # 绘制损失曲面ax.set_xlabel('a (slope)') # 设置 x 轴标签 (斜率)ax.set_ylabel('b (intercept)') # 设置 y 轴标签 (截距)ax.set_zlabel('Loss') # 设置 z 轴标签 (损失)ax.set_title(name) # 设置标题plt.tight_layout() plt.show()plot_loss_surface(X, y, MSERegressor, name="MSE Loss Surface", a_range=(1, 4), b_range=(-1, 3))plot_loss_surface(X, y, CauchyRegressor, name="Cauchy Loss Surface", delta=1.0, a_range=(1, 4), b_range=(-1, 3))
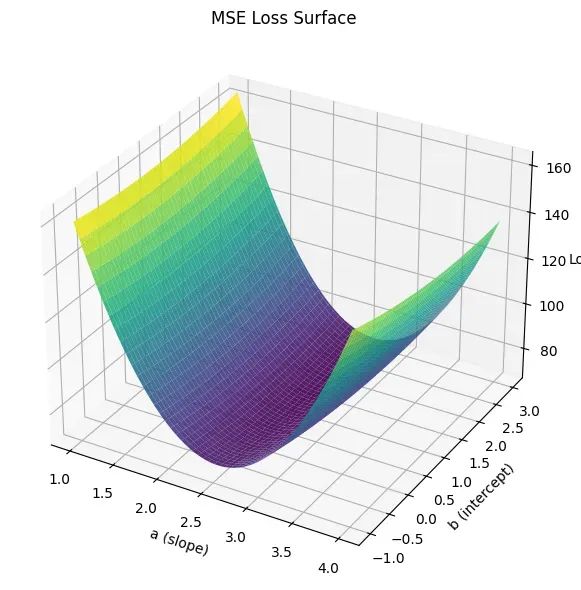
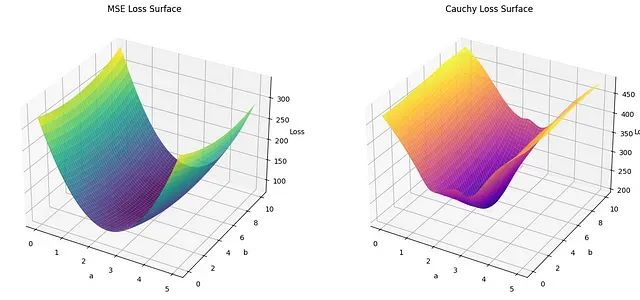
MSE损失曲面呈现典型的凸函数特征,具有明确的碗状结构和唯一的全局最小值。这种几何特性使其易于优化,但同时也使得损失函数对异常值高度敏感。异常值产生的大残差会显著改变曲面形状,将最小值位置从理想位置偏移。
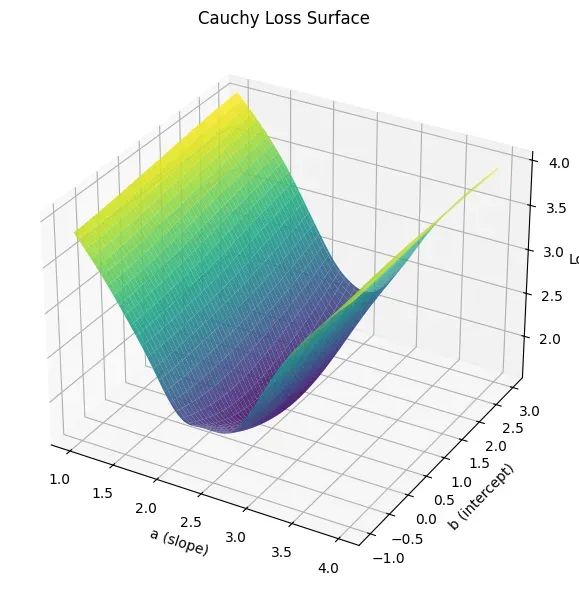
相比之下,Cauchy损失曲面在最优解附近表现出更加平缓的特征,整体梯度变化相对温和。这种特性是Cauchy损失函数对大残差相对不敏感的直接体现。函数不会因为异常值的存在而产生急剧的损失增长,而是呈现出逐渐饱和的趋势,从而在参数空间中形成更宽的低损失区域。这种特性使得优化过程对参数初值的依赖性降低,同时提升了对噪声数据的鲁棒性。
总结讨论
本研究通过系统的实证分析,揭示了MSE和Cauchy损失函数在处理含噪声数据时的本质差异。实验结果表明,MSE损失函数虽然在数学性质上具有优势,如凸性和可微性,但其对异常值的高度敏感性在实际应用中构成了显著限制。当数据集包含异常值时,MSE的二次惩罚机制会放大这些极端值的影响,导致参数估计产生系统性偏差。
Cauchy损失函数通过引入对数惩罚机制,有效缓解了这一问题。其损失函数在残差增大时表现出饱和特性,避免了异常值对整体拟合过程的过度干扰。实验结果显示,在相同的噪声环境下,Cauchy回归器的参数估计精度明显优于MSE回归器,特别是在截距参数的估计上表现尤为突出。
实际应用意义
这些发现对实际机器学习项目具有重要的指导意义。在现实世界的数据科学项目中,数据质量往往不够理想,异常值和噪声的存在是常态而非例外。传统的MSE损失函数可能不是最优选择,特别是在数据清洗资源有限或异常值具有实际意义的场景下。
Cauchy损失函数为这类问题提供了一个有效的解决方案。它不仅能够维持较好的拟合精度,还能显著提升模型的鲁棒性。这种特性在金融数据分析、传感器数据处理、医疗诊断等对异常值敏感的应用领域中具有特别重要的价值。
方法选择建议
基于本研究的结果,我们建议在选择损失函数时考虑以下因素:
当数据质量较高、异常值较少时,MSE损失函数仍然是优秀的选择,其优化特性和计算效率优势明显。然而,当数据存在明显的异常值或噪声污染时,Cauchy损失函数能够提供更加稳定和可靠的结果。
此外,Cauchy损失函数中的尺度参数δ需要根据具体问题进行调优。较小的δ值适用于对精度要求较高的场景,而较大的δ值则适用于异常值较多的鲁棒性要求较高的场景。
研究局限性与未来工作
本研究主要集中在一维线性回归问题上,未来的工作可以扩展到多维回归和非线性问题。此外,还可以探索其他鲁棒性损失函数,如Huber损失、Tukey损失等,进行更全面的比较分析。
在实际应用中,还需要考虑计算复杂度、收敛性和参数调优等工程化问题。这些因素对于损失函数的实际部署和应用具有重要影响。
https://avoid.overfit.cn/post/0db1639503ed43cba8f53b5e8b3ad8f9
作者: A. Rafli Pamungkas
相关文章:
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...
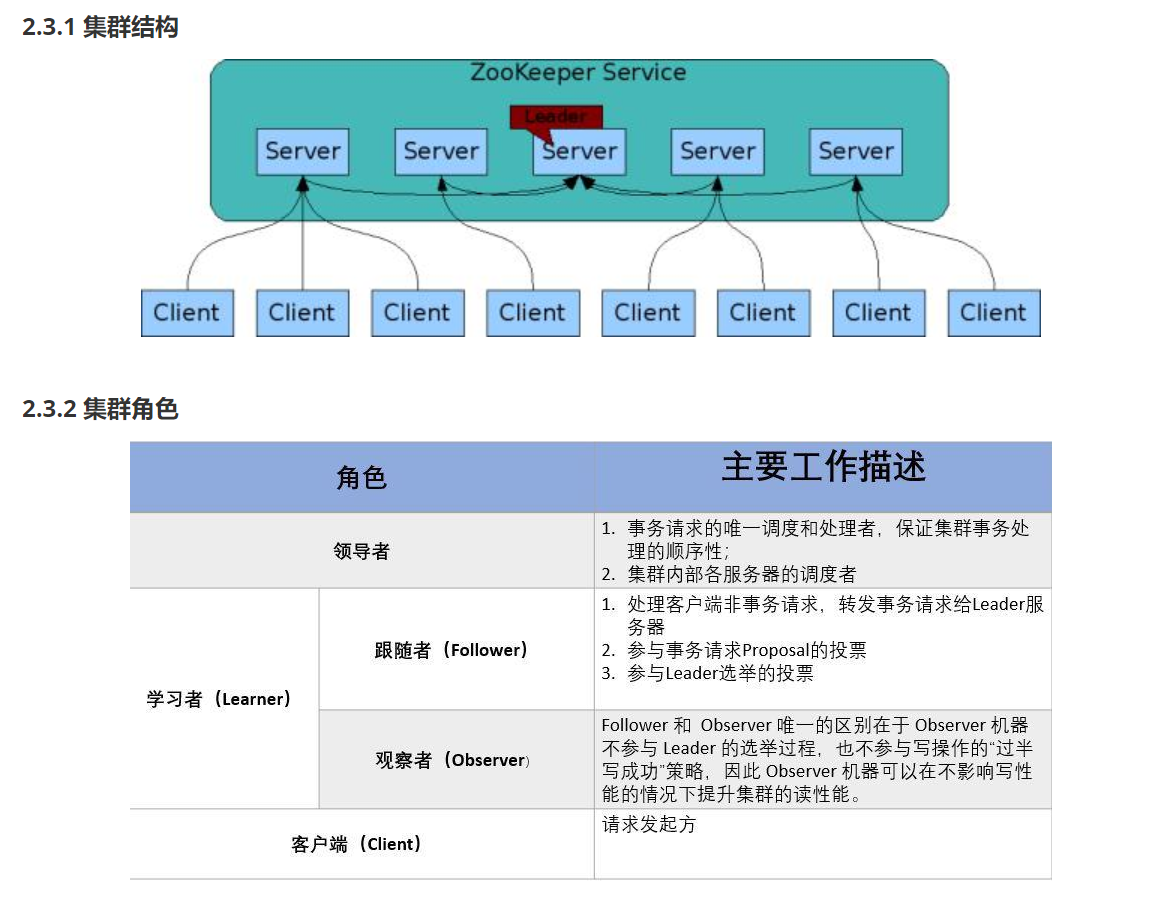
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...

【生成模型】视频生成论文调研
工作清单 上游应用方向:控制、速度、时长、高动态、多主体驱动 类型工作基础模型WAN / WAN-VACE / HunyuanVideo控制条件轨迹控制ATI~镜头控制ReCamMaster~多主体驱动Phantom~音频驱动Let Them Talk: Audio-Driven Multi-Person Conversational Video Generation速…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

基于Java Swing的电子通讯录设计与实现:附系统托盘功能代码详解
JAVASQL电子通讯录带系统托盘 一、系统概述 本电子通讯录系统采用Java Swing开发桌面应用,结合SQLite数据库实现联系人管理功能,并集成系统托盘功能提升用户体验。系统支持联系人的增删改查、分组管理、搜索过滤等功能,同时可以最小化到系统…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...
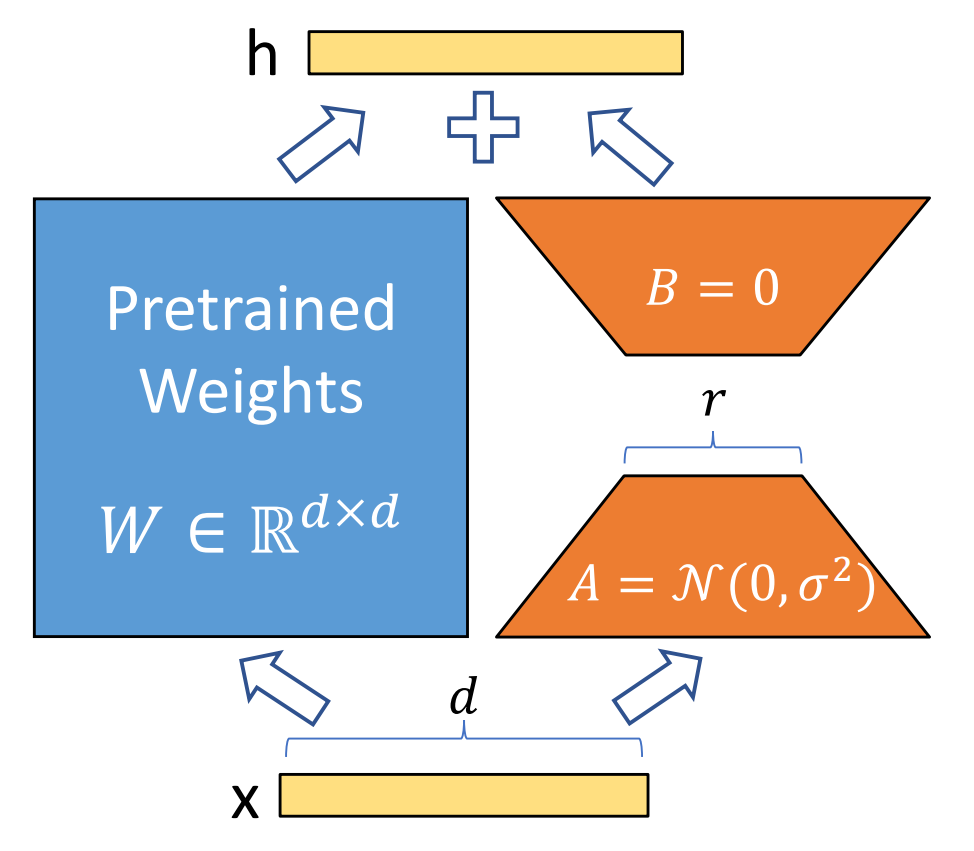
算法岗面试经验分享-大模型篇
文章目录 A 基础语言模型A.1 TransformerA.2 Bert B 大语言模型结构B.1 GPTB.2 LLamaB.3 ChatGLMB.4 Qwen C 大语言模型微调C.1 Fine-tuningC.2 Adapter-tuningC.3 Prefix-tuningC.4 P-tuningC.5 LoRA A 基础语言模型 A.1 Transformer (1)资源 论文&a…...

Fabric V2.5 通用溯源系统——增加图片上传与下载功能
fabric-trace项目在发布一年后,部署量已突破1000次,为支持更多场景,现新增支持图片信息上链,本文对图片上传、下载功能代码进行梳理,包含智能合约、后端、前端部分。 一、智能合约修改 为了增加图片信息上链溯源,需要对底层数据结构进行修改,在此对智能合约中的农产品数…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...

技术栈RabbitMq的介绍和使用
目录 1. 什么是消息队列?2. 消息队列的优点3. RabbitMQ 消息队列概述4. RabbitMQ 安装5. Exchange 四种类型5.1 direct 精准匹配5.2 fanout 广播5.3 topic 正则匹配 6. RabbitMQ 队列模式6.1 简单队列模式6.2 工作队列模式6.3 发布/订阅模式6.4 路由模式6.5 主题模式…...
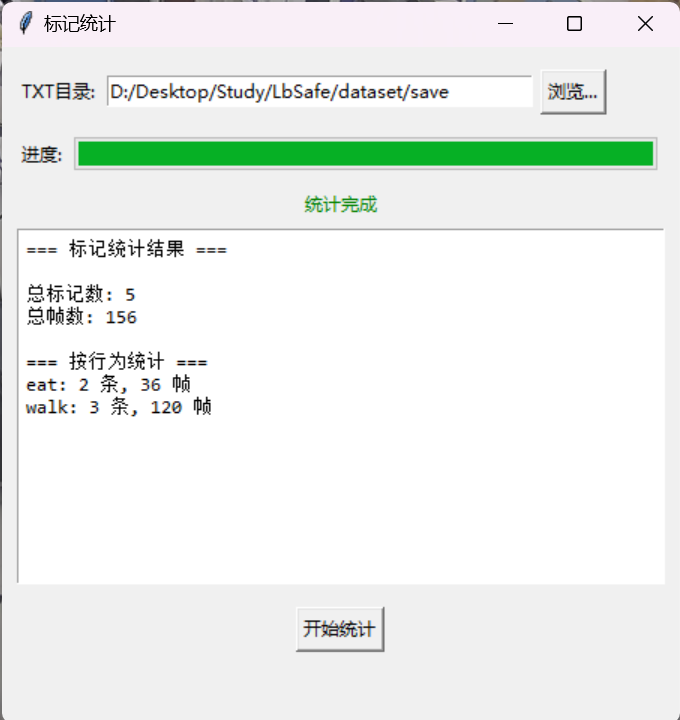
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...

SiFli 52把Imagie图片,Font字体资源放在指定位置,编译成指定img.bin和font.bin的问题
分区配置 (ptab.json) img 属性介绍: img 属性指定分区存放的 image 名称,指定的 image 名称必须是当前工程生成的 binary 。 如果 binary 有多个文件,则以 proj_name:binary_name 格式指定文件名, proj_name 为工程 名&…...

【7色560页】职场可视化逻辑图高级数据分析PPT模版
7种色调职场工作汇报PPT,橙蓝、黑红、红蓝、蓝橙灰、浅蓝、浅绿、深蓝七种色调模版 【7色560页】职场可视化逻辑图高级数据分析PPT模版:职场可视化逻辑图分析PPT模版https://pan.quark.cn/s/78aeabbd92d1...

AI病理诊断七剑下天山,医疗未来触手可及
一、病理诊断困局:刀尖上的医学艺术 1.1 金标准背后的隐痛 病理诊断被誉为"诊断的诊断",医生需通过显微镜观察组织切片,在细胞迷宫中捕捉癌变信号。某省病理质控报告显示,基层医院误诊率达12%-15%,专家会诊…...

Aspose.PDF 限制绕过方案:Java 字节码技术实战分享(仅供学习)
Aspose.PDF 限制绕过方案:Java 字节码技术实战分享(仅供学习) 一、Aspose.PDF 简介二、说明(⚠️仅供学习与研究使用)三、技术流程总览四、准备工作1. 下载 Jar 包2. Maven 项目依赖配置 五、字节码修改实现代码&#…...
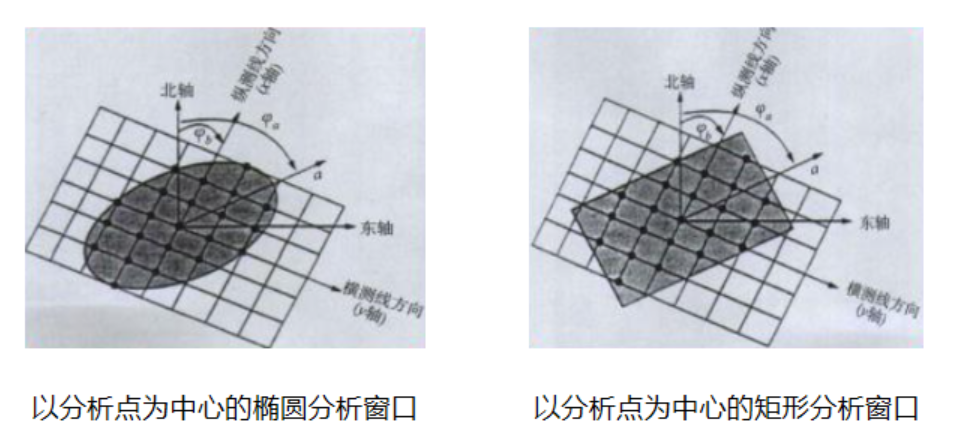
论文笔记——相干体技术在裂缝预测中的应用研究
目录 相关地震知识补充地震数据的认识地震几何属性 相干体算法定义基本原理第一代相干体技术:基于互相关的相干体技术(Correlation)第二代相干体技术:基于相似的相干体技术(Semblance)基于多道相似的相干体…...

在Ubuntu24上采用Wine打开SourceInsight
1. 安装wine sudo apt install wine 2. 安装32位库支持,SourceInsight是32位程序 sudo dpkg --add-architecture i386 sudo apt update sudo apt install wine32:i386 3. 验证安装 wine --version 4. 安装必要的字体和库(解决显示问题) sudo apt install fonts-wqy…...
安装docker)
Linux离线(zip方式)安装docker
目录 基础信息操作系统信息docker信息 安装实例安装步骤示例 遇到的问题问题1:修改默认工作路径启动失败问题2 找不到对应组 基础信息 操作系统信息 OS版本:CentOS 7 64位 内核版本:3.10.0 相关命令: uname -rcat /etc/os-rele…...

Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析
Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析 一、第一轮提问(基础概念问题) 1. 请解释Spring框架的核心容器是什么?它在Spring中起到什么作用? Spring框架的核心容器是IoC容器&#…...
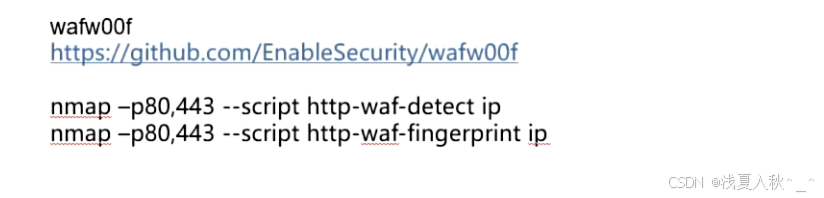
网站指纹识别
网站指纹识别 网站的最基本组成:服务器(操作系统)、中间件(web容器)、脚本语言、数据厍 为什么要了解这些?举个例子:发现了一个文件读取漏洞,我们需要读/etc/passwd,如…...

《C++ 模板》
目录 函数模板 类模板 非类型模板参数 模板特化 函数模板特化 类模板的特化 模板,就像一个模具,里面可以将不同类型的材料做成一个形状,其分为函数模板和类模板。 函数模板 函数模板可以简化函数重载的代码。格式:templa…...
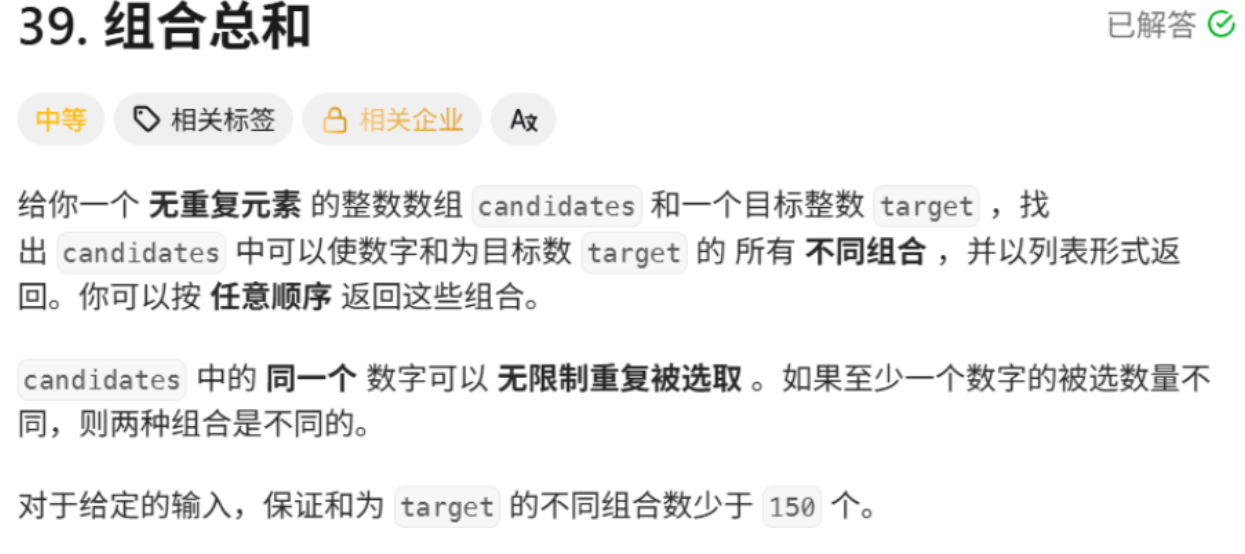
回溯算法学习
一、电话号码的字母组合 import java.util.ArrayList; import java.util.List;import javax.management.loading.PrivateClassLoader;public class letterCombinations {private static final String[] KEYPAD {"", //0"", //1"abc", //2"…...
多光源(Multiple Lights))
C++.OpenGL (14/64)多光源(Multiple Lights)
多光源(Multiple Lights) 多光源渲染技术概览 #mermaid-svg-3L5e5gGn76TNh7Lq {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-3L5e5gGn76TNh7Lq .error-icon{fill:#552222;}#mermaid-svg-3L5e5gGn76TNh7Lq .erro…...
短视频矩阵系统文案创作功能开发实践,定制化开发
在短视频行业迅猛发展的当下,企业和个人创作者为了扩大影响力、提升传播效果,纷纷采用短视频矩阵运营策略,同时管理多个平台、多个账号的内容发布。然而,频繁的文案创作需求让运营者疲于应对,如何高效产出高质量文案成…...

在QWebEngineView上实现鼠标、触摸等事件捕获的解决方案
这个问题我看其他博主也写了,要么要会员、要么写的乱七八糟。这里我整理一下,把问题说清楚并且给出代码,拿去用就行,照着葫芦画瓢。 问题 在继承QWebEngineView后,重写mousePressEvent或event函数无法捕获鼠标按下事…...

智能AI电话机器人系统的识别能力现状与发展水平
一、引言 随着人工智能技术的飞速发展,AI电话机器人系统已经从简单的自动应答工具演变为具备复杂交互能力的智能助手。这类系统结合了语音识别、自然语言处理、情感计算和机器学习等多项前沿技术,在客户服务、营销推广、信息查询等领域发挥着越来越重要…...
Yolov8 目标检测蒸馏学习记录
yolov8系列模型蒸馏基本流程,代码下载:这里本人提交了一个demo:djdll/Yolov8_Distillation: Yolov8轻量化_蒸馏代码实现 在轻量化模型设计中,**知识蒸馏(Knowledge Distillation)**被广泛应用,作为提升模型…...
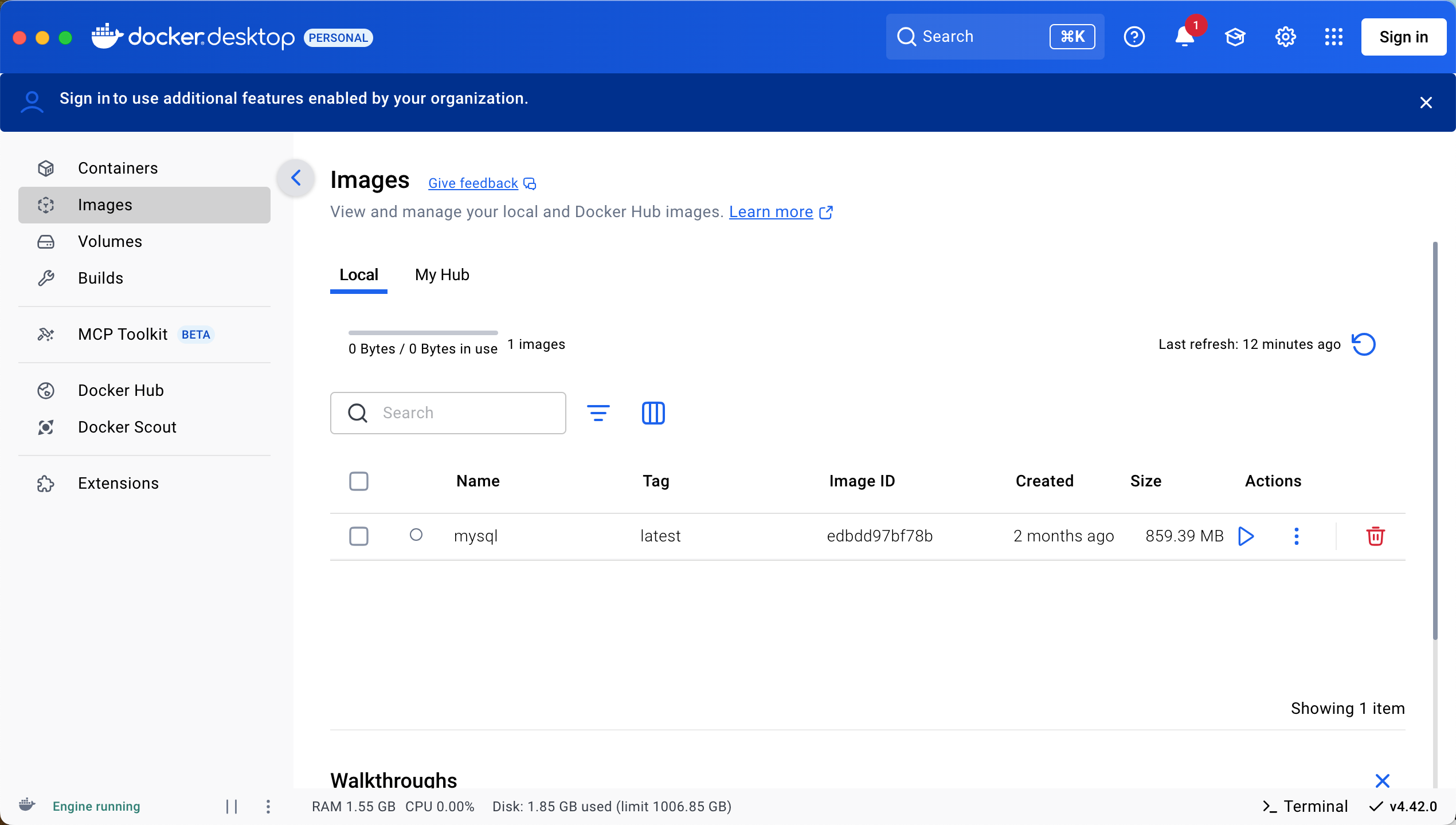
Docker 本地安装 mysql 数据库
Docker: Accelerated Container Application Development 下载对应操作系统版本的 docker ;并安装。 基础操作不再赘述。 打开 macOS 终端,开始 docker 安装mysql之旅 第一步 docker search mysql 》〉docker search mysql NAME DE…...

Java + Spring Boot + Mybatis 实现批量插入
在 Java 中使用 Spring Boot 和 MyBatis 实现批量插入可以通过以下步骤完成。这里提供两种常用方法:使用 MyBatis 的 <foreach> 标签和批处理模式(ExecutorType.BATCH)。 方法一:使用 XML 的 <foreach> 标签ÿ…...