Pinocchio 库详解及其在足式机器人上的应用
Pinocchio 库详解及其在足式机器人上的应用
Pinocchio (Pinocchio is not only a nose) 是一个开源的 C++ 库,专门用于快速计算机器人模型的正向运动学、逆向运动学、雅可比矩阵、动力学和动力学导数。它主要关注效率和准确性,并提供了一个通用的框架,可以用于各种类型的机器人,包括足式机器人。
1. Pinocchio 库的核心概念和特点:
- 高效的计算: Pinocchio 库使用高效的算法和数据结构,例如递归牛顿-欧拉算法 (Recursive Newton-Euler Algorithm, RNEA) 和 Composite Rigid Body Algorithm (CRBA),来实现快速的运动学和动力学计算。
- 自动微分 (Automatic Differentiation, AD): Pinocchio 库支持自动微分,可以自动计算动力学方程的导数,这对于优化和控制算法非常有用。
- 通用性: Pinocchio 库可以用于各种类型的机器人,包括串联机器人、并联机器人和足式机器人。
- 易于使用: Pinocchio 库提供了清晰的 API 和丰富的示例,方便用户快速上手。
- 开源: Pinocchio 库是开源的,这意味着用户可以自由地使用、修改和分发它。
- URDF 支持: Pinocchio 库可以从 URDF (Unified Robot Description Format) 文件中加载机器人模型,这使得它可以与许多现有的机器人仿真器和工具集成。
- Python 绑定: Pinocchio 库提供了 Python 绑定,方便用户在 Python 中使用它。
2. Pinocchio 库的主要功能:
- 正向运动学 (Forward Kinematics): 计算给定关节角度下机器人末端执行器的位置和姿态。
- 逆向运动学 (Inverse Kinematics): 计算给定末端执行器位置和姿态下机器人的关节角度。
- 雅可比矩阵 (Jacobian Matrix): 计算机器人末端执行器的速度与关节速度之间的关系。
- 动力学 (Dynamics): 计算机器人的动力学方程,包括质量矩阵、科里奥利力和重力力矩。
- 动力学导数 (Dynamics Derivatives): 计算动力学方程的导数,例如质量矩阵的导数、科里奥利力的导数和重力力矩的导数。
- 碰撞检测 (Collision Detection): 检测机器人自身或机器人与环境之间的碰撞。
- 可视化 (Visualization): 提供简单的可视化工具,用于显示机器人模型。
3. Pinocchio 在足式机器人上的应用:
Pinocchio 库可以用于解决足式机器人的各种问题,包括:
- 运动学分析 (Kinematic Analysis): 分析足式机器人的运动学特性,例如可达工作空间、奇异点等。
- 动力学分析 (Dynamic Analysis): 分析足式机器人的动力学特性,例如质量分布、惯性矩等。
- 运动规划 (Motion Planning): 生成足式机器人的运动轨迹,例如行走、跑步、跳跃等。Pinocchio 可以用于计算轨迹的动力学约束,并优化轨迹的能量消耗。
- 控制 (Control): 设计足式机器人的控制算法,例如平衡控制、步态控制等。Pinocchio 可以用于计算控制算法所需的动力学信息,例如质量矩阵、科里奥利力和重力力矩。
- 仿真 (Simulation): 在仿真环境中模拟足式机器人的运动。Pinocchio 可以用于计算机器人的动力学方程,并与仿真引擎集成。
- 步态生成 (Gait Generation): 设计足式机器人的步态模式,包括支撑相的顺序、持续时间和足端位置。Pinocchio 可以用于计算步态的动力学约束,并优化步态的稳定性。
- 力控制 (Force Control): 控制足式机器人与环境之间的相互作用力,例如地面反作用力。Pinocchio 可以用于计算力控制算法所需的雅可比矩阵和动力学信息.
4. 使用 Pinocchio 进行足式机器人控制的流程:
- 加载机器人模型: 从 URDF 文件中加载足式机器人的模型。
- 设置机器人配置: 设置机器人的关节角度和速度。
- 计算运动学信息: 使用 Pinocchio 库计算机器人的正向运动学、逆向运动学和雅可比矩阵。
- 计算动力学信息: 使用 Pinocchio 库计算机器人的动力学方程,包括质量矩阵、科里奥利力和重力力矩。
- 设计控制算法: 根据计算出的运动学和动力学信息,设计足式机器人的控制算法。
- 仿真和实验: 在仿真环境中测试控制器的性能,并最终在真实的足式机器人上进行实验。
5. Pinocchio 的优势:
- 高效性: Pinocchio 库使用高效的算法和数据结构,可以快速地计算运动学和动力学信息。
- 准确性: Pinocchio 库使用精确的数学模型,可以提供准确的运动学和动力学计算结果。
- 通用性: Pinocchio 库可以用于各种类型的机器人,包括足式机器人。
- 易于使用: Pinocchio 库提供了清晰的 API 和丰富的示例,方便用户快速上手。
- 开源: Pinocchio 库是开源的,这意味着用户可以自由地使用、修改和分发它。
- URDF 支持: Pinocchio 库可以从 URDF 文件中加载机器人模型,这使得它可以与许多现有的机器人仿真器和工具集成。
6. Pinocchio 的局限性:
- 刚体假设: Pinocchio 库假设机器人是刚体,这意味着它不能处理柔性机器人的问题。
- 模型依赖性: Pinocchio 库的性能高度依赖于机器人模型的准确性。
- 碰撞检测的复杂性: 对于复杂的机器人模型,碰撞检测的计算复杂度可能很高。
7. 示例:使用 Pinocchio 计算足式机器人的重心位置
以下是一个简化的示例,说明如何使用 Pinocchio 计算足式机器人的重心位置:
import pinocchio
import numpy as np# 加载机器人模型
model = pinocchio.buildModelFromUrdf("path/to/your/robot.urdf")# 创建数据对象
data = model.createData()# 设置关节角度
q = np.zeros(model.nq) # 假设所有关节角度为 0# 计算正向运动学
pinocchio.forwardKinematics(model, data, q)# 计算重心位置
com = pinocchio.centerOfMass(model, data, q)# 打印重心位置
print("重心位置:", com)
8. 学习资源:
- Pinocchio 官方网站: https://stack-of-tasks.github.io/pinocchio/
- Pinocchio GitHub 仓库: https://github.com/stack-of-tasks/pinocchio
- Pinocchio 示例: Pinocchio 仓库中包含许多示例,展示了如何使用 Pinocchio 解决各种机器人问题。
- 相关论文: 搜索关于 Pinocchio 和机器人动力学的学术论文。
总结:
Pinocchio 是一个强大的工具,可以用于快速计算机器人模型的运动学和动力学信息。它提供了高效的算法、准确的计算结果和易于使用的 API。虽然 Pinocchio 存在一些局限性,但它仍然是机器人研究和开发的重要工具,尤其是在足式机器人领域。通过学习和使用 Pinocchio,您可以更好地理解和控制足式机器人,并开发出更先进的机器人系统。
希望这个详细的介绍能够帮助您更好地了解 Pinocchio 库及其在足式机器人上的应用。 祝您学习顺利!
相关文章:

Pinocchio 库详解及其在足式机器人上的应用
Pinocchio 库详解及其在足式机器人上的应用 Pinocchio (Pinocchio is not only a nose) 是一个开源的 C 库,专门用于快速计算机器人模型的正向运动学、逆向运动学、雅可比矩阵、动力学和动力学导数。它主要关注效率和准确性,并提供了一个通用的框架&…...
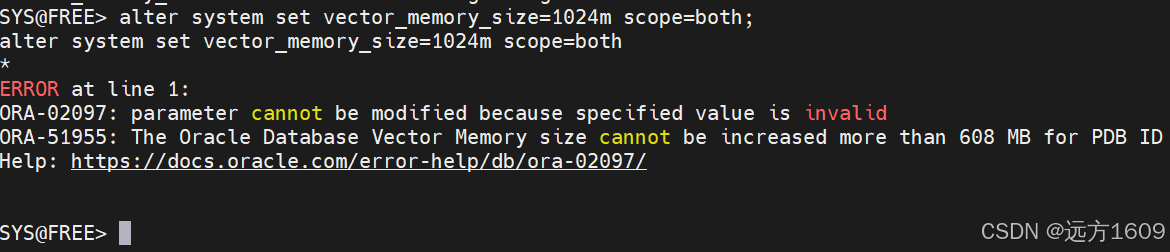
10-Oracle 23 ai Vector Search 概述和参数
一、Oracle AI Vector Search 概述 企业和个人都在尝试各种AI,使用客户端或是内部自己搭建集成大模型的终端,加速与大型语言模型(LLM)的结合,同时使用检索增强生成(Retrieval Augmented Generation &#…...
Reasoning over Uncertain Text by Generative Large Language Models
https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829 1. 概述 文本中的不确定性在许多语境中传达,从日常对话到特定领域的文档(例如医学文档)(Heritage 2013;Landmark、Gulbrandsen 和 Svenevei…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...
)
安卓基础(aar)
重新设置java21的环境,临时设置 $env:JAVA_HOME "D:\Android Studio\jbr" 查看当前环境变量 JAVA_HOME 的值 echo $env:JAVA_HOME 构建ARR文件 ./gradlew :private-lib:assembleRelease 目录是这样的: MyApp/ ├── app/ …...

Hive 存储格式深度解析:从 TextFile 到 ORC,如何选对数据存储方案?
在大数据处理领域,Hive 作为 Hadoop 生态中重要的数据仓库工具,其存储格式的选择直接影响数据存储成本、查询效率和计算资源消耗。面对 TextFile、SequenceFile、Parquet、RCFile、ORC 等多种存储格式,很多开发者常常陷入选择困境。本文将从底…...

华硕a豆14 Air香氛版,美学与科技的馨香融合
在快节奏的现代生活中,我们渴望一个能激发创想、愉悦感官的工作与生活伙伴,它不仅是冰冷的科技工具,更能触动我们内心深处的细腻情感。正是在这样的期许下,华硕a豆14 Air香氛版翩然而至,它以一种前所未有的方式&#x…...
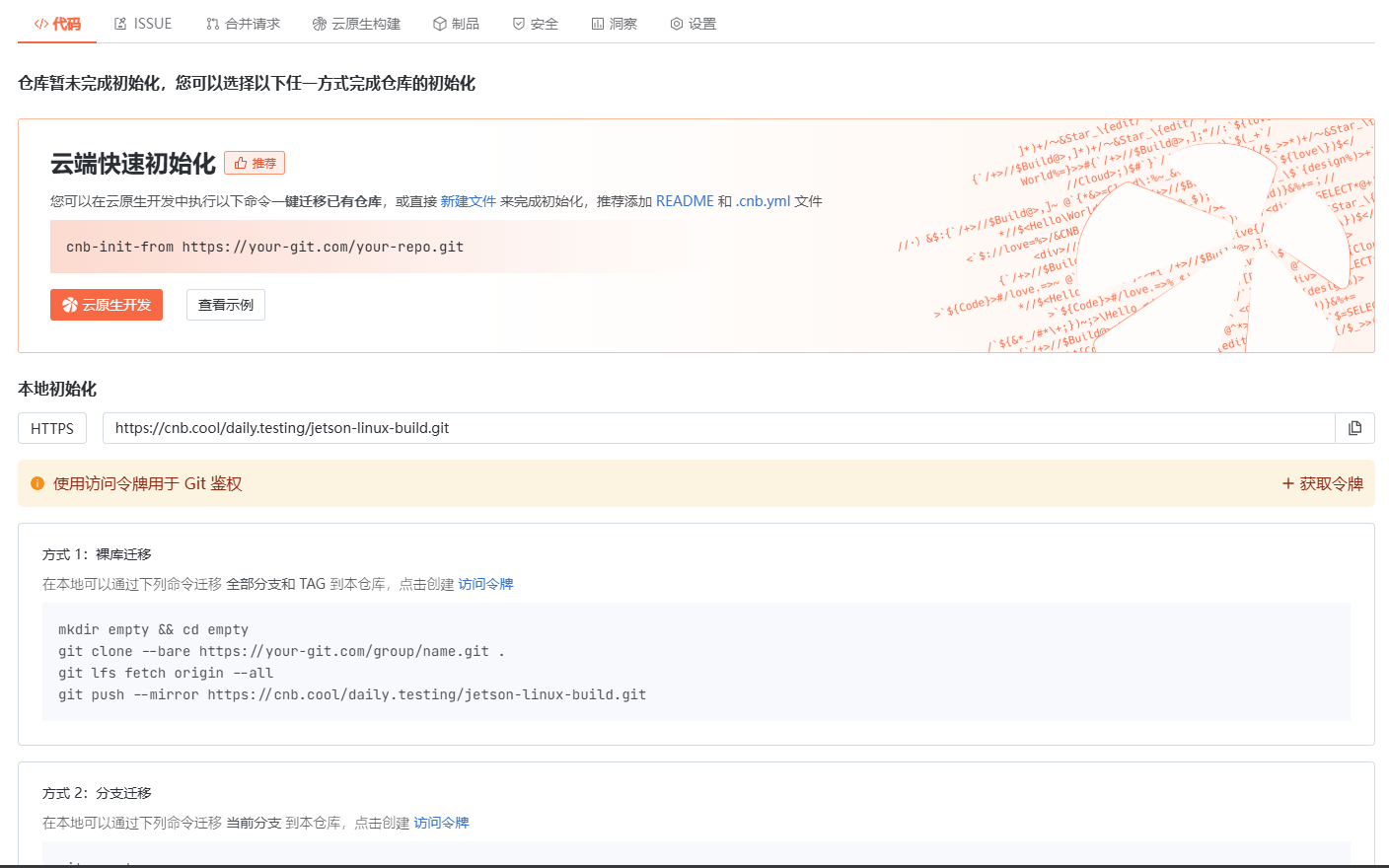
云原生玩法三问:构建自定义开发环境
云原生玩法三问:构建自定义开发环境 引言 临时运维一个古董项目,无文档,无环境,无交接人,俗称三无。 运行设备的环境老,本地环境版本高,ssh不过去。正好最近对 腾讯出品的云原生 cnb 感兴趣&…...
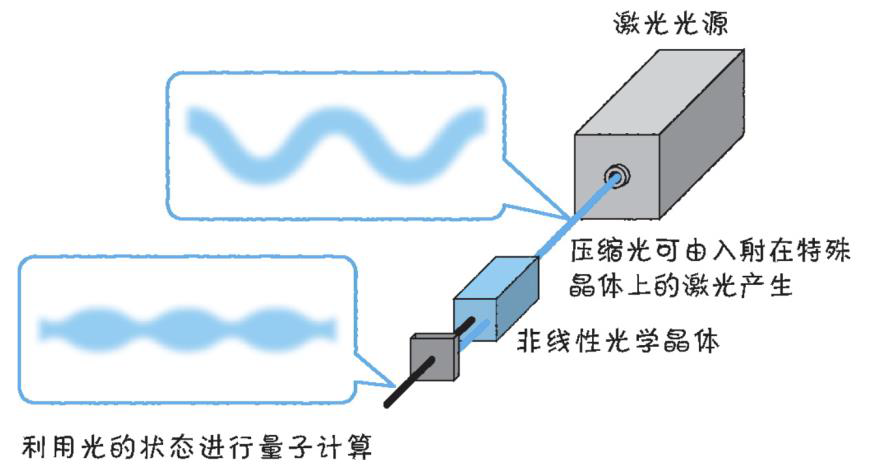
以光量子为例,详解量子获取方式
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...

Python 包管理器 uv 介绍
Python 包管理器 uv 全面介绍 uv 是由 Astral(热门工具 Ruff 的开发者)推出的下一代高性能 Python 包管理器和构建工具,用 Rust 编写。它旨在解决传统工具(如 pip、virtualenv、pip-tools)的性能瓶颈,同时…...
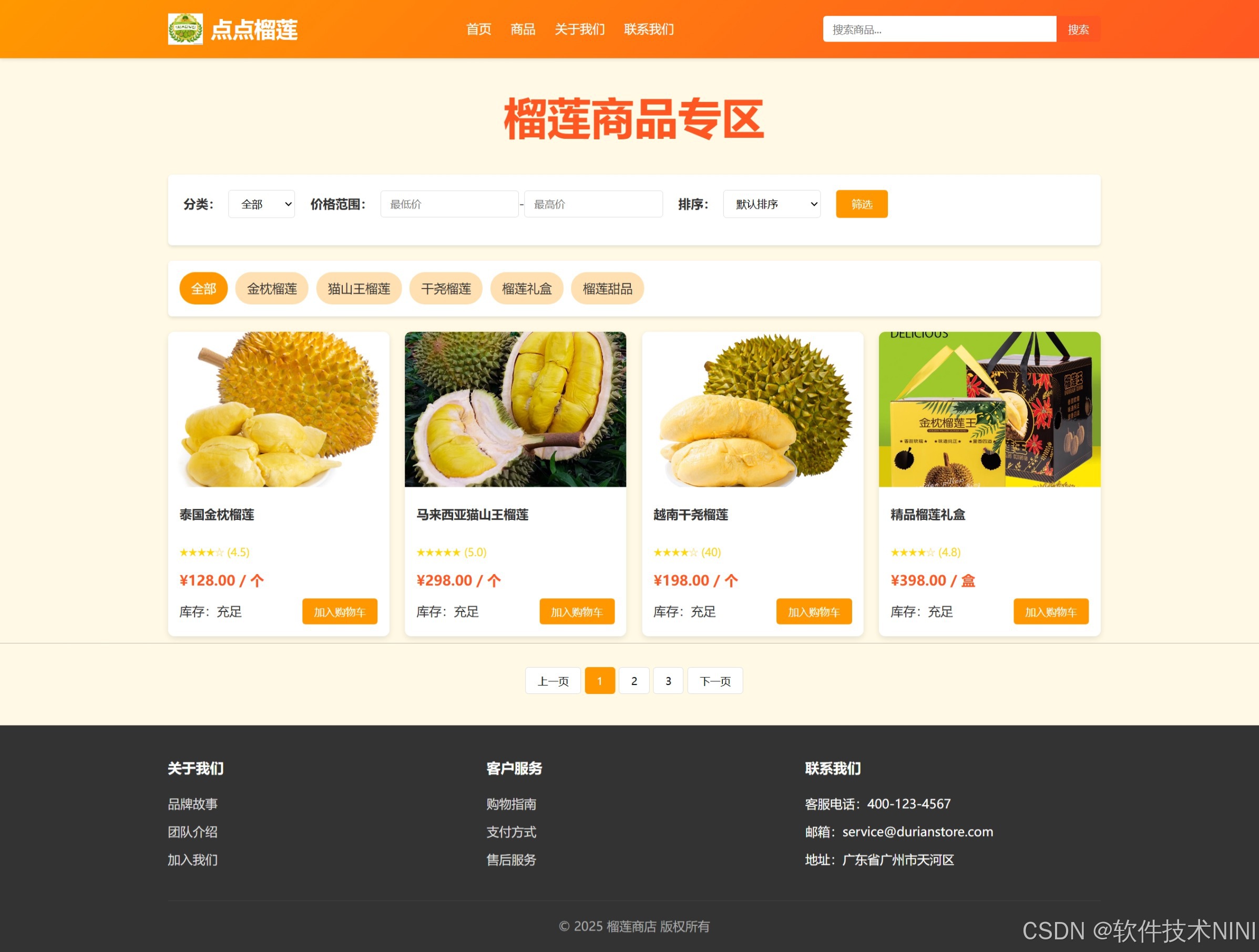
html css js网页制作成品——HTML+CSS榴莲商城网页设计(4页)附源码
目录 一、👨🎓网站题目 二、✍️网站描述 三、📚网站介绍 四、🌐网站效果 五、🪓 代码实现 🧱HTML 六、🥇 如何让学习不再盲目 七、🎁更多干货 一、👨…...

python报错No module named ‘tensorflow.keras‘
是由于不同版本的tensorflow下的keras所在的路径不同,结合所安装的tensorflow的目录结构修改from语句即可。 原语句: from tensorflow.keras.layers import Conv1D, MaxPooling1D, LSTM, Dense 修改后: from tensorflow.python.keras.lay…...
相比,优缺点是什么?适用于哪些场景?)
Redis的发布订阅模式与专业的 MQ(如 Kafka, RabbitMQ)相比,优缺点是什么?适用于哪些场景?
Redis 的发布订阅(Pub/Sub)模式与专业的 MQ(Message Queue)如 Kafka、RabbitMQ 进行比较,核心的权衡点在于:简单与速度 vs. 可靠与功能。 下面我们详细展开对比。 Redis Pub/Sub 的核心特点 它是一个发后…...

【Java学习笔记】BigInteger 和 BigDecimal 类
BigInteger 和 BigDecimal 类 二者共有的常见方法 方法功能add加subtract减multiply乘divide除 注意点:传参类型必须是类对象 一、BigInteger 1. 作用:适合保存比较大的整型数 2. 使用说明 创建BigInteger对象 传入字符串 3. 代码示例 import j…...
九天毕昇深度学习平台 | 如何安装库?
pip install 库名 -i https://pypi.tuna.tsinghua.edu.cn/simple --user 举个例子: 报错 ModuleNotFoundError: No module named torch 那么我需要安装 torch pip install torch -i https://pypi.tuna.tsinghua.edu.cn/simple --user pip install 库名&#x…...

服务器--宝塔命令
一、宝塔面板安装命令 ⚠️ 必须使用 root 用户 或 sudo 权限执行! sudo su - 1. CentOS 系统: yum install -y wget && wget -O install.sh http://download.bt.cn/install/install_6.0.sh && sh install.sh2. Ubuntu / Debian 系统…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...

使用Matplotlib创建炫酷的3D散点图:数据可视化的新维度
文章目录 基础实现代码代码解析进阶技巧1. 自定义点的大小和颜色2. 添加图例和样式美化3. 真实数据应用示例实用技巧与注意事项完整示例(带样式)应用场景在数据科学和可视化领域,三维图形能为我们提供更丰富的数据洞察。本文将手把手教你如何使用Python的Matplotlib库创建引…...

React---day11
14.4 react-redux第三方库 提供connect、thunk之类的函数 以获取一个banner数据为例子 store: 我们在使用异步的时候理应是要使用中间件的,但是configureStore 已经自动集成了 redux-thunk,注意action里面要返回函数 import { configureS…...

Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信
文章目录 Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信前言一、网络通信基础概念二、服务端与客户端的完整流程图解三、每一步的详细讲解和代码示例1. 创建Socket(服务端和客户端都要)2. 绑定本地地址和端口&#x…...
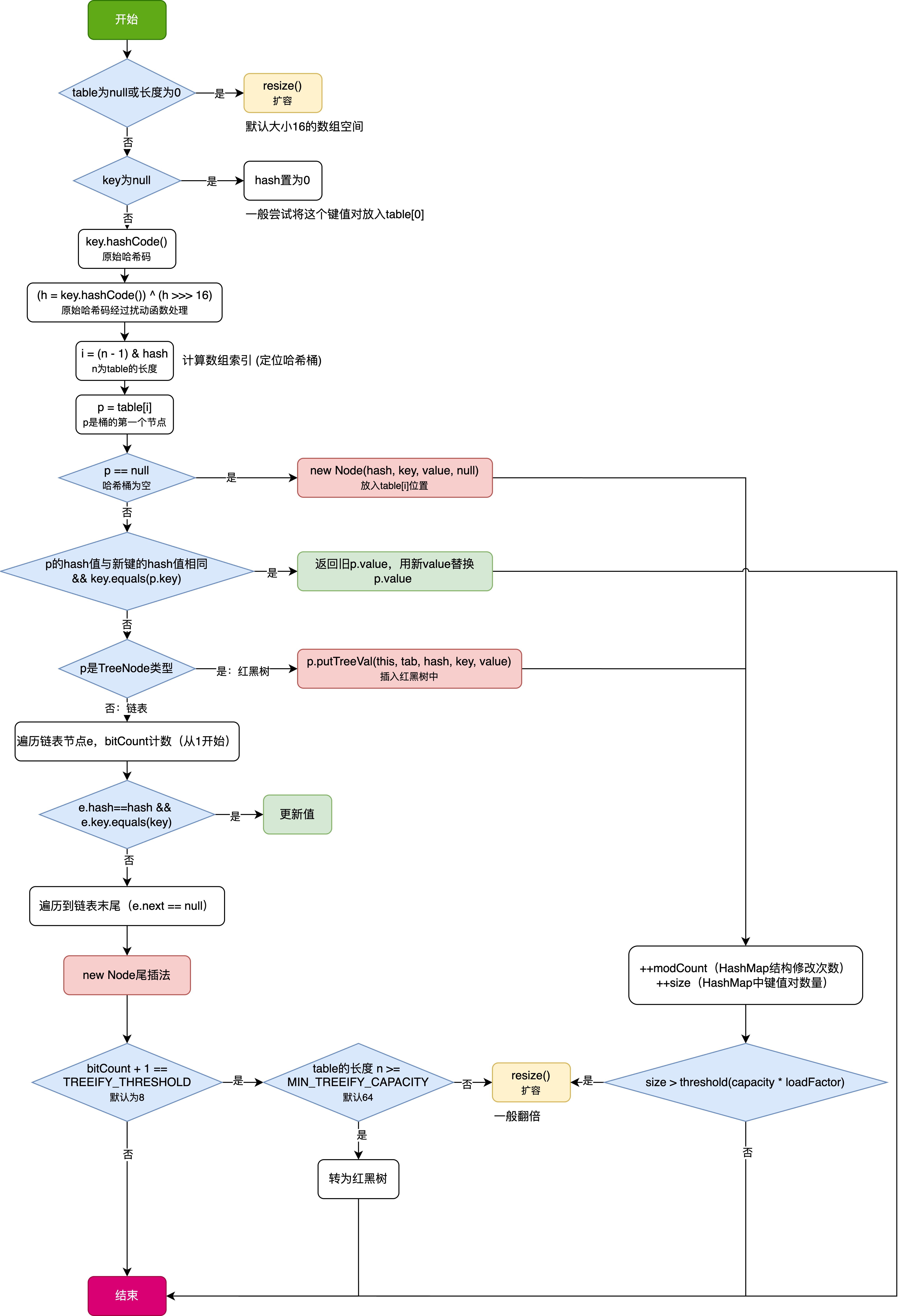
HashMap中的put方法执行流程(流程图)
1 put操作整体流程 HashMap 的 put 操作是其最核心的功能之一。在 JDK 1.8 及以后版本中,其主要逻辑封装在 putVal 这个内部方法中。整个过程大致如下: 初始判断与哈希计算: 首先,putVal 方法会检查当前的 table(也就…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

sipsak:SIP瑞士军刀!全参数详细教程!Kali Linux教程!
简介 sipsak 是一个面向会话初始协议 (SIP) 应用程序开发人员和管理员的小型命令行工具。它可以用于对 SIP 应用程序和设备进行一些简单的测试。 sipsak 是一款 SIP 压力和诊断实用程序。它通过 sip-uri 向服务器发送 SIP 请求,并检查收到的响应。它以以下模式之一…...

JAVA后端开发——多租户
数据隔离是多租户系统中的核心概念,确保一个租户(在这个系统中可能是一个公司或一个独立的客户)的数据对其他租户是不可见的。在 RuoYi 框架(您当前项目所使用的基础框架)中,这通常是通过在数据表中增加一个…...

高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数
高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数 在软件开发中,单例模式(Singleton Pattern)是一种常见的设计模式,确保一个类仅有一个实例,并提供一个全局访问点。在多线程环境下,实现单例模式时需要注意线程安全问题,以防止多个线程同时创建实例,导致…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

LeetCode - 199. 二叉树的右视图
题目 199. 二叉树的右视图 - 力扣(LeetCode) 思路 右视图是指从树的右侧看,对于每一层,只能看到该层最右边的节点。实现思路是: 使用深度优先搜索(DFS)按照"根-右-左"的顺序遍历树记录每个节点的深度对于…...

CSS设置元素的宽度根据其内容自动调整
width: fit-content 是 CSS 中的一个属性值,用于设置元素的宽度根据其内容自动调整,确保宽度刚好容纳内容而不会超出。 效果对比 默认情况(width: auto): 块级元素(如 <div>)会占满父容器…...

蓝桥杯 冶炼金属
原题目链接 🔧 冶炼金属转换率推测题解 📜 原题描述 小蓝有一个神奇的炉子用于将普通金属 O O O 冶炼成为一种特殊金属 X X X。这个炉子有一个属性叫转换率 V V V,是一个正整数,表示每 V V V 个普通金属 O O O 可以冶炼出 …...

管理学院权限管理系统开发总结
文章目录 🎓 管理学院权限管理系统开发总结 - 现代化Web应用实践之路📝 项目概述🏗️ 技术架构设计后端技术栈前端技术栈 💡 核心功能特性1. 用户管理模块2. 权限管理系统3. 统计报表功能4. 用户体验优化 🗄️ 数据库设…...