Python ROS2【机器人中间件框架】 简介
| 销 | 量 | 过 | 万 |
|---|---|---|---|
| TEEIS德国护膝夏天用薄款 优惠券 | 冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜 | 巨奇严选 鞋子除臭剂360ml | 多芬身体磨砂膏280g |
| 健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券 | AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖 | 妙洁棉柔抹布10片装 厨房洗碗布家用神器 去油污强力吸水巾 | 宝宝馋了婴幼儿酸奶无添加白砂糖85g*10袋 儿童常温奶宝宝辅食饮品 |
| 素养生活 有机红花生400g 生花生米东北四粒红花生 凉拌 杂粮粗粮真空包装 | UG NX 12.0中文版从入门到精通ug nx建模曲面钣金装配工程图 有限元分析 机械设计 数控加工编程 autocad教程cad教材自学版完全自学宝典 | 乐品乐茶茶叶绿茶特级毛尖2025新茶明前春茶嫩芽散装自己喝京东自营 | 松鲜鲜松茸鲜调味料125g【0添加 松茸提鲜】代替盐鸡精味精煲汤炒菜调味 优惠券 |
| 本迪大号加厚洗脸盆2只装36cm洗脸盆洗菜盆洗脚盆学生塑料盆泡脚盆 | 公牛(BULL)开关插座 G12系列 十孔插座86型插座面板 G12Z423 白色 | 周十五益生菌蜂蜜露孕妇开塞蜜露待产包用产后哺乳期儿童蜂蜜栓礼品36支 | 小鹿蓝蓝婴幼儿肉蔬多维蝴蝶面600g含30小袋婴儿辅食果蔬营养面超值装 优惠券 |
ROS2(Robot Operating System 2) 是一个开源的机器人中间件框架,用于构建复杂的机器人系统。相比 ROS1,ROS2 在实时性、安全性、跨平台支持和分布式架构上进行了全面升级。
核心优势
- DDS 通信协议
使用 Data Distribution Service (DDS) 实现去中心化通信,支持实时数据传输和 QoS 策略。 - 跨平台支持
支持 Linux、Windows、macOS 和实时操作系统(RTOS)。 - 多语言兼容
支持 Python、C++、Java 等,Python 是最常用的开发语言。 - 微服务架构
节点可独立编译/部署,适合模块化开发。
Python ROS2 核心概念
1. 节点 (Node)
import rclpy
from rclpy.node import Nodeclass MyNode(Node):def __init__(self):super().__init__('my_node_name')self.get_logger().info("Node started!")def main():rclpy.init()node = MyNode()rclpy.spin(node) # 保持节点运行rclpy.shutdown()
2. 话题通信 (Topic)
# 发布者
from std_msgs.msg import String
publisher = self.create_publisher(String, 'chatter', 10)
publisher.publish(String(data="Hello ROS2"))# 订阅者
def callback(msg):self.get_logger().info(f"Received: {msg.data}")
self.create_subscription(String, 'chatter', callback, 10)
3. 服务 (Service)
# 服务端
from example_interfaces.srv import AddTwoIntsdef add(request, response):response.sum = request.a + request.breturn responseself.srv = self.create_service(AddTwoInts, 'add_two_ints', add)# 客户端
client = self.create_client(AddTwoInts, 'add_two_ints')
request = AddTwoInts.Request(a=2, b=3)
future = client.call_async(request)
4. 参数 (Parameters)
# 声明参数
self.declare_parameter('speed', 0.5)# 读取参数
speed = self.get_parameter('speed').value
开发流程示例
1. 创建 ROS2 包
ros2 pkg create my_py_pkg --build-type ament_python
2. 编写节点代码
保存到 my_py_pkg/my_py_pkg/node_script.py
3. 配置入口点
在 setup.py 中添加:
entry_points={'console_scripts': ['my_node = my_py_pkg.node_script:main'],
}
4. 编译运行
colcon build --packages-select my_py_pkg
source install/setup.bash
ros2 run my_py_pkg my_node
关键工具
| 工具 | 命令示例 | 用途 |
|---|---|---|
| rqt | rqt | 图形化调试工具 |
| ros2 topic | ros2 topic list | 查看活跃话题 |
| ros2 node | ros2 node info /node_name | 节点信息 |
| ros2 bag | ros2 bag record /topic | 数据录制与回放 |
学习资源
- 官方文档
- ROS2 Python 示例
- 命令行工具:
ros2 --help - 教程:
ros2 run demo_nodes_py talker/listener
提示:使用
colcon build编译包,通过source install/setup.bash激活环境。
ROS2 应用领域
ROS2 广泛应用于现代机器人系统的开发,涵盖以下领域:
1. 工业自动化
- 机械臂控制
- 物流搬运机器人
- 自动化质检系统
# 机械臂关节控制示例
from control_msgs.action import FollowJointTrajectory
from trajectory_msgs.msg import JointTrajectoryPointclass RobotArmController(Node):def __init__(self):super().__init__('arm_controller')self._action_client = ActionClient(self, FollowJointTrajectory, '/arm_controller/follow_joint_trajectory')def move_to_position(self, positions):goal_msg = FollowJointTrajectory.Goal()point = JointTrajectoryPoint()point.positions = positions # [rad]point.time_from_start = Duration(seconds=2).to_msg()goal_msg.trajectory.points.append(point)self._action_client.send_goal_async(goal_msg)
2. 自动驾驶
- 环境感知(激光雷达/摄像头)
- 路径规划
- 车辆控制
# 激光雷达数据处理
from sensor_msgs.msg import LaserScanclass ObstacleDetector(Node):def __init__(self):super().__init__('obstacle_detector')self.subscription = self.create_subscription(LaserScan,'/scan',self.scan_callback,10)def scan_callback(self, msg):# 检测前方障碍物(简化示例)front_scan = msg.ranges[len(msg.ranges)//4:3*len(msg.ranges)//4]if min(front_scan) < 1.0: # 1米内有障碍物self.get_logger().warn("Obstacle detected!")
3. 服务机器人
- 室内导航
- 人机交互
- 任务调度
# 自主导航到目标点
from nav2_msgs.action import NavigateToPose
from geometry_msgs.msg import PoseStampedclass DeliveryRobot(Node):def send_to_location(self, x, y):goal_pose = PoseStamped()goal_pose.header.frame_id = 'map'goal_pose.pose.position.x = xgoal_pose.pose.position.y = ygoal_msg = NavigateToPose.Goal()goal_msg.pose = goal_poseself.nav_client.wait_for_server()self.nav_client.send_goal_async(goal_msg)
4. 无人机系统
- 飞行控制
- 集群协同
- 航拍测绘
# 无人机航点飞行
from geographic_msgs.msg import GeoPoseStamped
from mavros_msgs.srv import CommandBoolclass DroneController(Node):async def fly_waypoints(self, coordinates):# 解锁无人机arm = self.create_client(CommandBool, '/mavros/cmd/arming')await arm.call_async(CommandBool.Request(value=True))# 发送航点for lat, lon, alt in coordinates:goal = GeoPoseStamped()goal.position.latitude = latgoal.position.longitude = longoal.position.altitude = altself.waypoint_publisher.publish(goal)await asyncio.sleep(5) # 等待到达
5. 医疗机器人
- 手术辅助
- 医疗物流
- 康复训练
# 手术器械精准控制
from sensor_msgs.msg import Joyclass SurgicalController(Node):def __init__(self):self.sub = self.create_subscription(Joy, '/surgical_joystick', self.joy_callback, 10)self.tool_pub = self.create_publisher(Twist, '/surgical_tool/control', 10)def joy_callback(self, msg):# 将游戏手柄输入转换为器械控制control = Twist()control.linear.x = msg.axes[1] * 0.1 # 精度控制control.linear.y = msg.axes[0] * 0.1self.tool_pub.publish(control)
综合案例:智能仓库机器人
# warehouse_robot.py
import rclpy
from rclpy.action import ActionClient
from rclpy.node import Node
from nav2_msgs.action import NavigateToPose
from std_msgs.msg import String
from warehouse_interfaces.srv import ItemRequestclass WarehouseRobot(Node):def __init__(self):super().__init__('warehouse_robot')# 导航客户端self.nav_client = ActionClient(self, NavigateToPose, 'navigate_to_pose')# 库存服务self.inventory_client = self.create_client(ItemRequest, 'item_location')# 任务订阅self.create_subscription(String, 'delivery_tasks', self.task_callback, 10)# 当前状态self.current_task = Noneasync def task_callback(self, msg):item_id = msg.dataself.get_logger().info(f"New task: Fetch {item_id}")# 查询物品位置item_loc = await self.get_item_location(item_id)if not item_loc:self.get_logger().error(f"Item {item_id} not found!")return# 导航到物品位置await self.navigate_to(item_loc.x, item_loc.y)# 模拟拾取操作await asyncio.sleep(2)# 导航到发货区await self.navigate_to(5.0, 3.0)self.get_logger().info(f"Item {item_id} delivered!")async def get_item_location(self, item_id):req = ItemRequest.Request()req.item_id = item_idfuture = self.inventory_client.call_async(req)await futurereturn future.result().locationasync def navigate_to(self, x, y):goal_pose = PoseStamped()goal_pose.header.frame_id = 'map'goal_pose.pose.position.x = xgoal_pose.pose.position.y = ygoal_msg = NavigateToPose.Goal()goal_msg.pose = goal_poseself.nav_client.wait_for_server()send_goal_future = self.nav_client.send_goal_async(goal_msg)await send_goal_futuregoal_handle = send_goal_future.result()# 等待导航完成result_future = goal_handle.get_result_async()await result_futurereturn result_future.result().result
系统架构图
+-------------------+ +----------------+ +-----------------+
| 任务管理系统 | | 导航系统 | | 库存数据库 |
| (发布任务) |---->| (路径规划/避障)|<----| (物品位置查询) |
+-------------------+ +-------+--------+ +-----------------+|+-------v--------+| 机器人执行器 || - 移动底盘 || - 机械臂 || - 传感器 |+----------------+
开发进阶技巧
-
组件化设计
# 独立导航组件 class NavigationComponent(Node):def __init__(self):super().__init__('navigation_component')# ... 导航实现 ...# 独立任务处理组件 class TaskHandlerComponent(Node):def __init__(self):super().__init__('task_handler')# ... 任务处理 ... -
QoS策略配置
from rclpy.qos import QoSProfile, QoSReliabilityPolicy# 确保关键指令可靠传输 reliable_qos = QoSProfile(depth=10,reliability=QoSReliabilityPolicy.RELIABLE )self.cmd_pub = self.create_publisher(Twist, '/cmd_vel', reliable_qos ) -
生命周期管理
from rclpy.lifecycle import LifecycleNodeclass SafetyMonitor(LifecycleNode):def on_activate(self):self.get_logger().info("Safety system activated")# 启动监控线程def on_deactivate(self):self.get_logger().info("Safety system deactivated")# 停止监控
行业应用案例
- 亚马逊物流机器人:使用ROS2实现仓库自主导航
- 达芬奇手术系统:基于ROS2的手术器械控制
- NASA火星车:ROS2用于太空探测系统
- 宝马生产线:ROS2协调工业机械臂
- 农业无人机:ROS2实现自动喷洒和监测
实际开发建议:
- 使用
ros2 launch管理复杂系统启动- 利用
ros2 bag记录和回放传感器数据- 使用
ros2 doctor定期检查系统健康状态- 通过
ros2 security启用通信加密- 使用
ros2 tracing进行性能分析
完整项目示例参考:ROS2 Warehouse Robot Demo
官方进阶教程:ROS2 Navigation Guide
Python 图书推荐
| 书名 | 出版社 | 推荐 |
|---|---|---|
| Python编程 从入门到实践 第3版(图灵出品) | 人民邮电出版社 | ★★★★★ |
| Python数据科学手册(第2版)(图灵出品) | 人民邮电出版社 | ★★★★★ |
| 图形引擎开发入门:基于Python语言 | 电子工业出版社 | ★★★★★ |
| 科研论文配图绘制指南 基于Python(异步图书出品) | 人民邮电出版社 | ★★★★★ |
| Effective Python:编写好Python的90个有效方法(第2版 英文版) | 人民邮电出版社 | ★★★★★ |
| Python人工智能与机器学习(套装全5册) | 清华大学出版社 | ★★★★★ |
JAVA 图书推荐
| 书名 | 出版社 | 推荐 |
|---|---|---|
| Java核心技术 第12版:卷Ⅰ+卷Ⅱ | 机械工业出版社 | ★★★★★ |
| Java核心技术 第11版 套装共2册 | 机械工业出版社 | ★★★★★ |
| Java语言程序设计基础篇+进阶篇 原书第12版 套装共2册 | 机械工业出版社 | ★★★★★ |
| Java 11官方参考手册(第11版) | 清华大学出版社 | ★★★★★ |
| Offer来了:Java面试核心知识点精讲(第2版)(博文视点出品) | 电子工业出版社 | ★★★★★ |
相关文章:

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...

使用Matplotlib创建炫酷的3D散点图:数据可视化的新维度
文章目录 基础实现代码代码解析进阶技巧1. 自定义点的大小和颜色2. 添加图例和样式美化3. 真实数据应用示例实用技巧与注意事项完整示例(带样式)应用场景在数据科学和可视化领域,三维图形能为我们提供更丰富的数据洞察。本文将手把手教你如何使用Python的Matplotlib库创建引…...

React---day11
14.4 react-redux第三方库 提供connect、thunk之类的函数 以获取一个banner数据为例子 store: 我们在使用异步的时候理应是要使用中间件的,但是configureStore 已经自动集成了 redux-thunk,注意action里面要返回函数 import { configureS…...

Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信
文章目录 Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信前言一、网络通信基础概念二、服务端与客户端的完整流程图解三、每一步的详细讲解和代码示例1. 创建Socket(服务端和客户端都要)2. 绑定本地地址和端口&#x…...
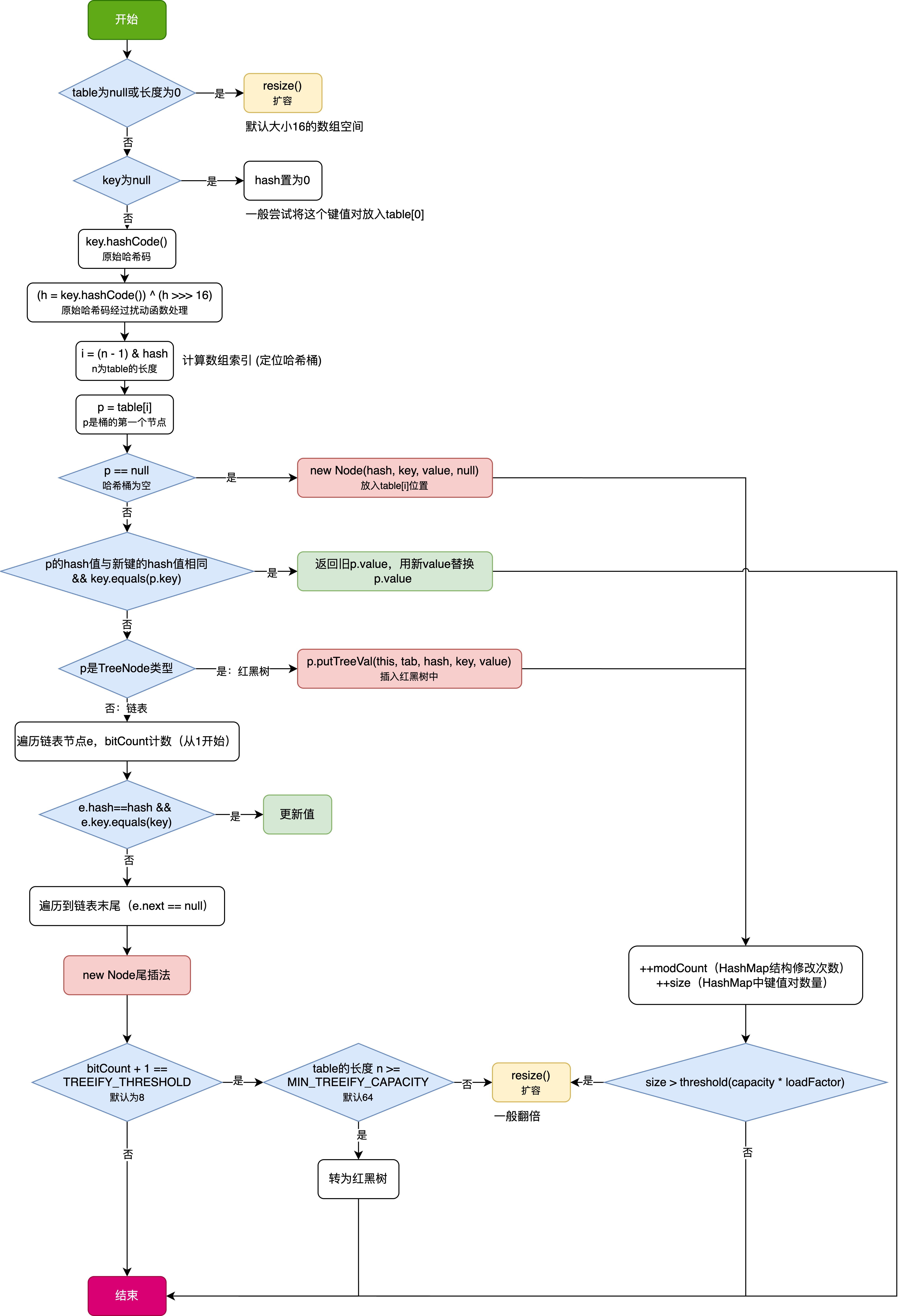
HashMap中的put方法执行流程(流程图)
1 put操作整体流程 HashMap 的 put 操作是其最核心的功能之一。在 JDK 1.8 及以后版本中,其主要逻辑封装在 putVal 这个内部方法中。整个过程大致如下: 初始判断与哈希计算: 首先,putVal 方法会检查当前的 table(也就…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

sipsak:SIP瑞士军刀!全参数详细教程!Kali Linux教程!
简介 sipsak 是一个面向会话初始协议 (SIP) 应用程序开发人员和管理员的小型命令行工具。它可以用于对 SIP 应用程序和设备进行一些简单的测试。 sipsak 是一款 SIP 压力和诊断实用程序。它通过 sip-uri 向服务器发送 SIP 请求,并检查收到的响应。它以以下模式之一…...

JAVA后端开发——多租户
数据隔离是多租户系统中的核心概念,确保一个租户(在这个系统中可能是一个公司或一个独立的客户)的数据对其他租户是不可见的。在 RuoYi 框架(您当前项目所使用的基础框架)中,这通常是通过在数据表中增加一个…...

高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数
高效线程安全的单例模式:Python 中的懒加载与自定义初始化参数 在软件开发中,单例模式(Singleton Pattern)是一种常见的设计模式,确保一个类仅有一个实例,并提供一个全局访问点。在多线程环境下,实现单例模式时需要注意线程安全问题,以防止多个线程同时创建实例,导致…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...

LeetCode - 199. 二叉树的右视图
题目 199. 二叉树的右视图 - 力扣(LeetCode) 思路 右视图是指从树的右侧看,对于每一层,只能看到该层最右边的节点。实现思路是: 使用深度优先搜索(DFS)按照"根-右-左"的顺序遍历树记录每个节点的深度对于…...

CSS设置元素的宽度根据其内容自动调整
width: fit-content 是 CSS 中的一个属性值,用于设置元素的宽度根据其内容自动调整,确保宽度刚好容纳内容而不会超出。 效果对比 默认情况(width: auto): 块级元素(如 <div>)会占满父容器…...

蓝桥杯 冶炼金属
原题目链接 🔧 冶炼金属转换率推测题解 📜 原题描述 小蓝有一个神奇的炉子用于将普通金属 O O O 冶炼成为一种特殊金属 X X X。这个炉子有一个属性叫转换率 V V V,是一个正整数,表示每 V V V 个普通金属 O O O 可以冶炼出 …...

管理学院权限管理系统开发总结
文章目录 🎓 管理学院权限管理系统开发总结 - 现代化Web应用实践之路📝 项目概述🏗️ 技术架构设计后端技术栈前端技术栈 💡 核心功能特性1. 用户管理模块2. 权限管理系统3. 统计报表功能4. 用户体验优化 🗄️ 数据库设…...
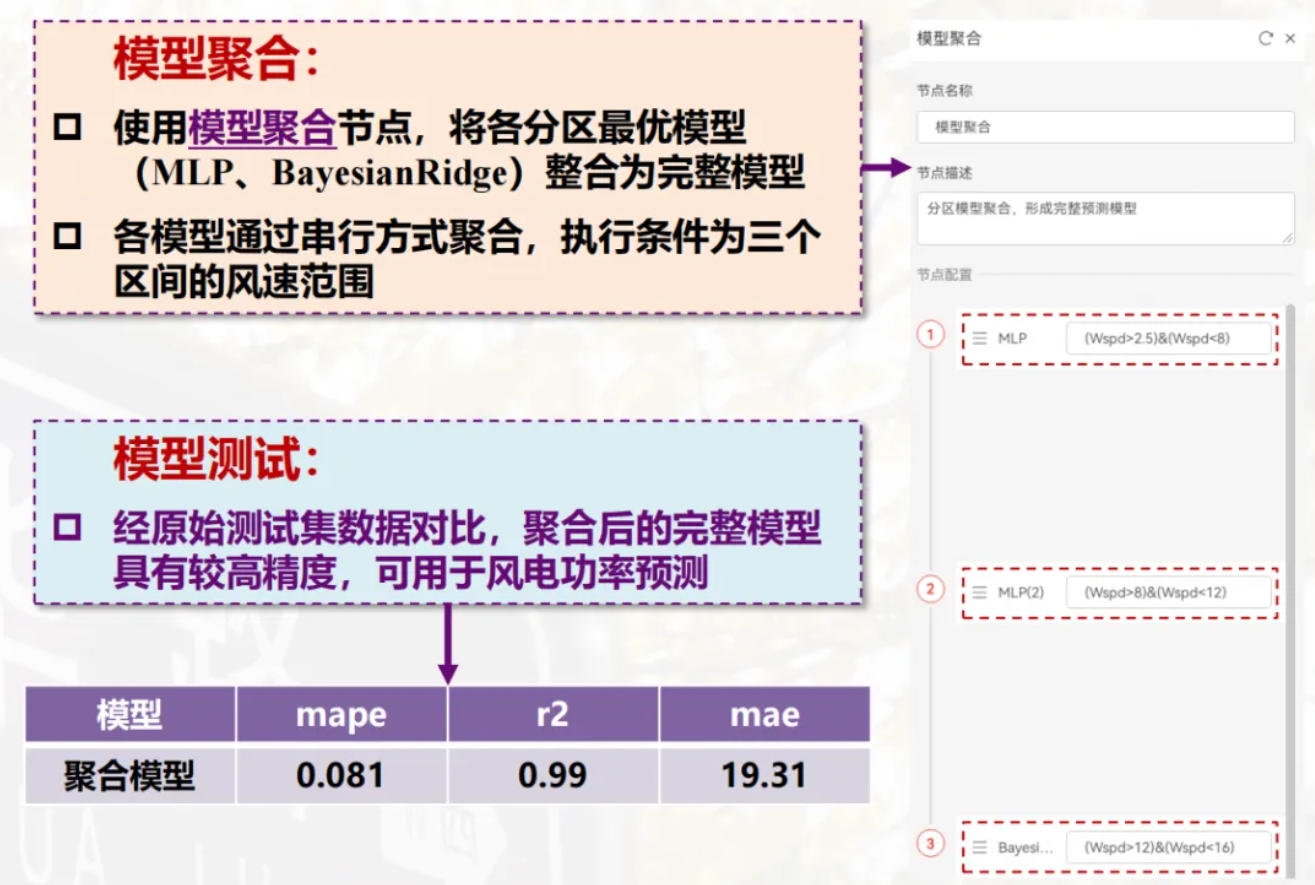
用机器学习破解新能源领域的“弃风”难题
音乐发烧友深有体会,玩音乐的本质就是玩电网。火电声音偏暖,水电偏冷,风电偏空旷。至于太阳能发的电,则略显朦胧和单薄。 不知你是否有感觉,近两年家里的音响声音越来越冷,听起来越来越单薄? —…...
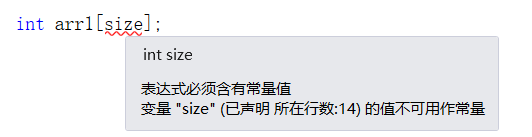
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...
中医有效性探讨
文章目录 西医是如何发展到以生物化学为药理基础的现代医学?传统医学奠基期(远古 - 17 世纪)近代医学转型期(17 世纪 - 19 世纪末)现代医学成熟期(20世纪至今) 中医的源远流长和一脉相承远古至…...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...
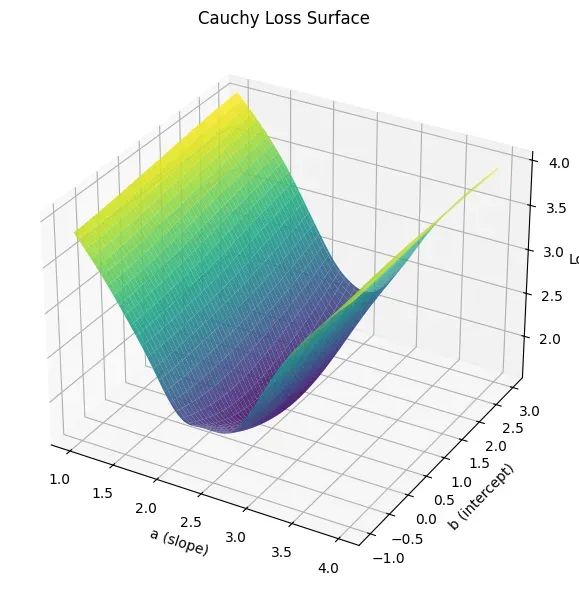
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...
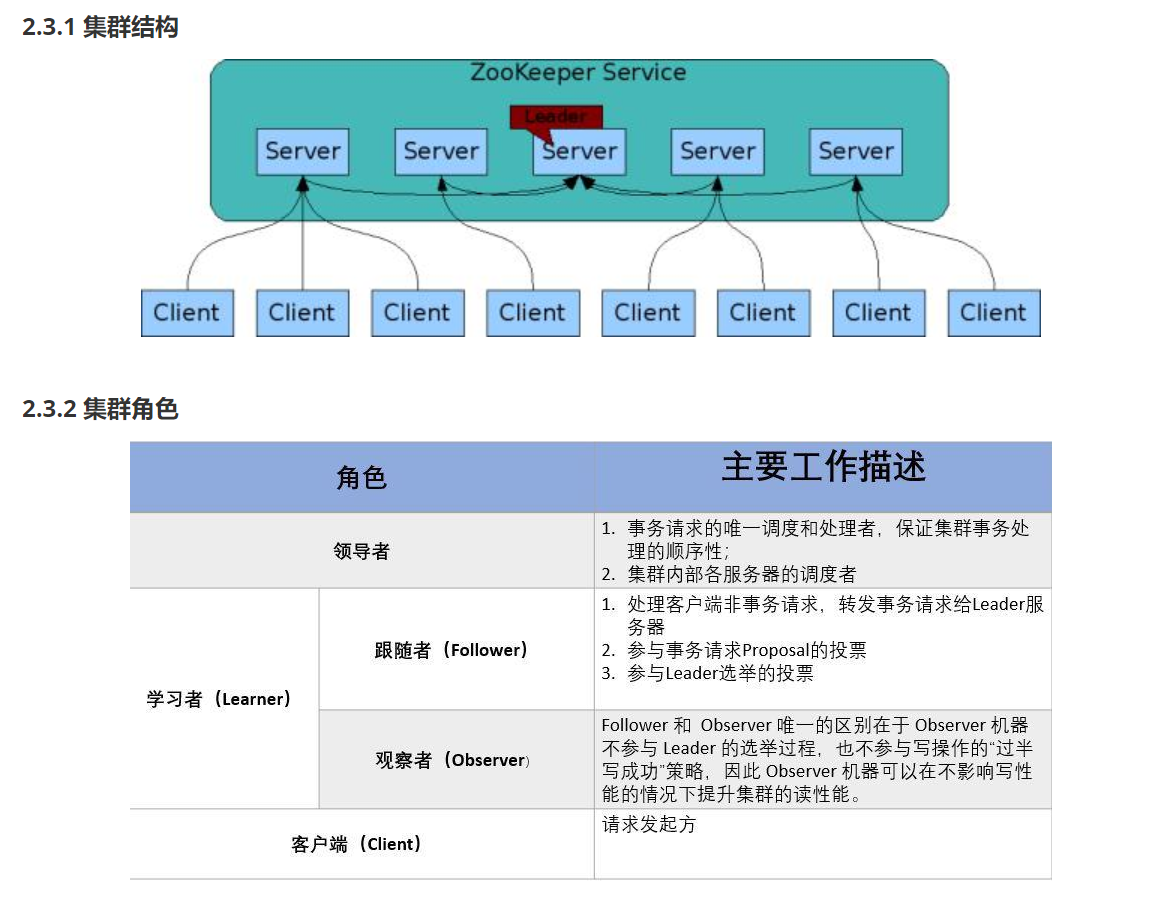
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...

【生成模型】视频生成论文调研
工作清单 上游应用方向:控制、速度、时长、高动态、多主体驱动 类型工作基础模型WAN / WAN-VACE / HunyuanVideo控制条件轨迹控制ATI~镜头控制ReCamMaster~多主体驱动Phantom~音频驱动Let Them Talk: Audio-Driven Multi-Person Conversational Video Generation速…...
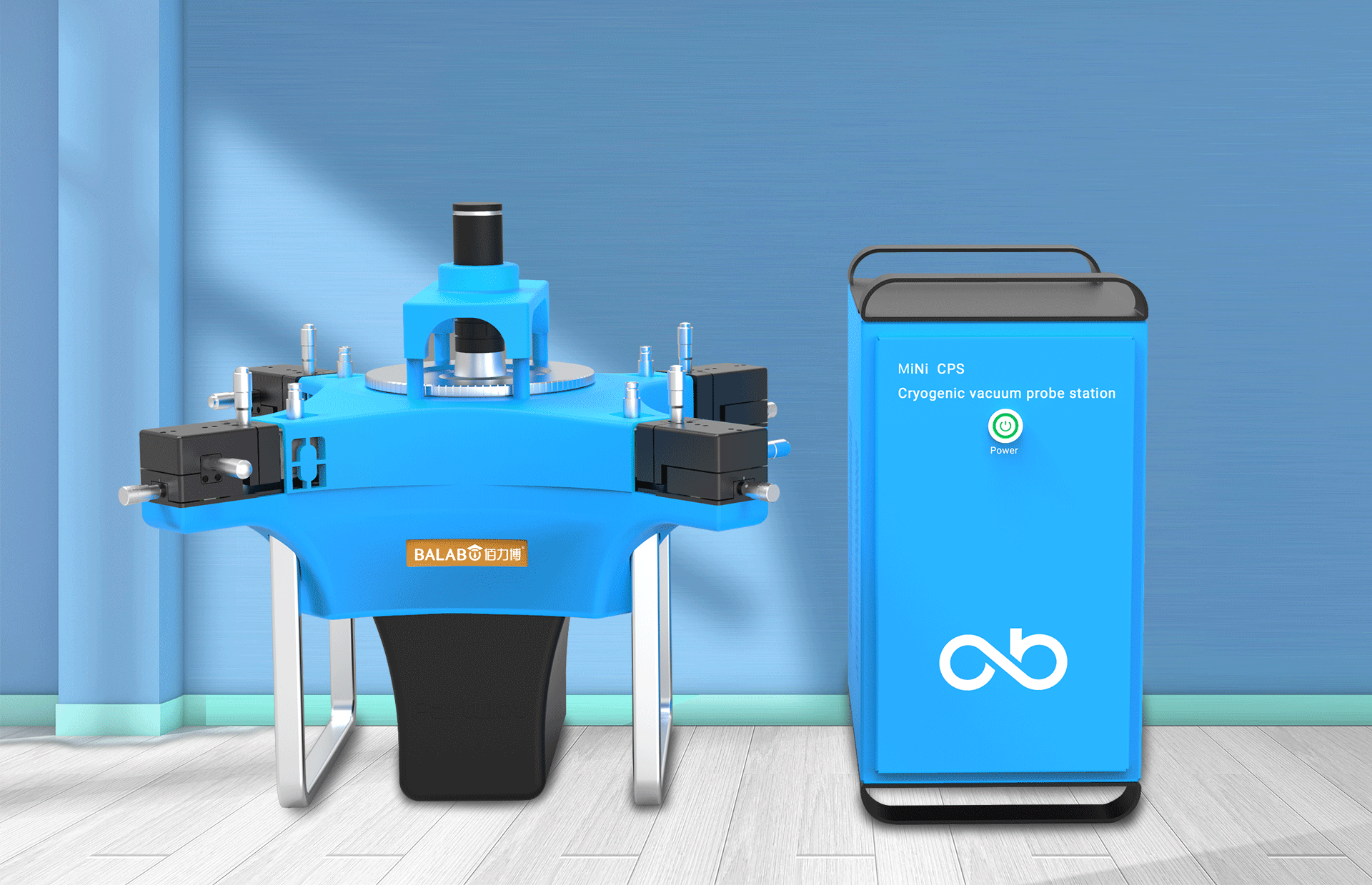
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

基于Java Swing的电子通讯录设计与实现:附系统托盘功能代码详解
JAVASQL电子通讯录带系统托盘 一、系统概述 本电子通讯录系统采用Java Swing开发桌面应用,结合SQLite数据库实现联系人管理功能,并集成系统托盘功能提升用户体验。系统支持联系人的增删改查、分组管理、搜索过滤等功能,同时可以最小化到系统…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...
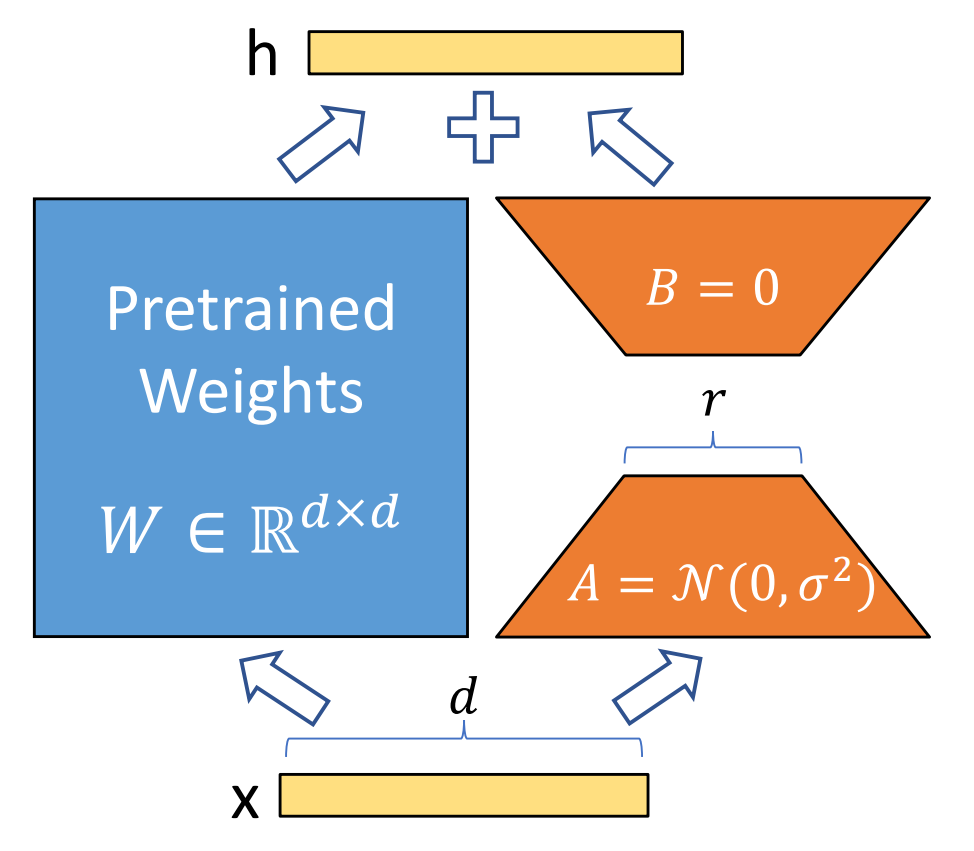
算法岗面试经验分享-大模型篇
文章目录 A 基础语言模型A.1 TransformerA.2 Bert B 大语言模型结构B.1 GPTB.2 LLamaB.3 ChatGLMB.4 Qwen C 大语言模型微调C.1 Fine-tuningC.2 Adapter-tuningC.3 Prefix-tuningC.4 P-tuningC.5 LoRA A 基础语言模型 A.1 Transformer (1)资源 论文&a…...

Fabric V2.5 通用溯源系统——增加图片上传与下载功能
fabric-trace项目在发布一年后,部署量已突破1000次,为支持更多场景,现新增支持图片信息上链,本文对图片上传、下载功能代码进行梳理,包含智能合约、后端、前端部分。 一、智能合约修改 为了增加图片信息上链溯源,需要对底层数据结构进行修改,在此对智能合约中的农产品数…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...

技术栈RabbitMq的介绍和使用
目录 1. 什么是消息队列?2. 消息队列的优点3. RabbitMQ 消息队列概述4. RabbitMQ 安装5. Exchange 四种类型5.1 direct 精准匹配5.2 fanout 广播5.3 topic 正则匹配 6. RabbitMQ 队列模式6.1 简单队列模式6.2 工作队列模式6.3 发布/订阅模式6.4 路由模式6.5 主题模式…...
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...