从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。
以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企业超89.1万家。其中,2025年至今新增注册相关企业约9.1万余家,从企业注册数量趋势来看,近五年间,机器人相关企业的注册数量呈现出逐年增长的态势,并在2024年达到顶峰。
同样热闹非凡的还有融资市场。继云迹科技、博雷顿、兆威机电、仙工智能等机器人玩家后,日前,国家级重点“小巨人”企业乐动机器人也正式向港交所递交招股书。
资料显示,作为头部视觉感知技术供应商,乐动机器人的产品服务全球前十大家用机器人公司中的七家及所有前五大商用机器人公司。
同时,其41.4%的营收增速与超600万台技术搭载量彰显技术壁垒,但19.5%的毛利率与持续亏损亦折射出行业共性难题:技术型企业如何平衡研发投入与盈利周期?
万亿智能机器人赛道,乐动以视觉感知享受红利
受益于智能制造政策的支持、传感器等硬件设备技术的突破、AI有效提升了机器人的自然交互与复杂理解力,以及各类家用和商用服务机器人场景加速商业化落地的拉动,全球智能机器人市场规模呈现出迅猛增长的态势。
根据灼识咨询的资料,2020-2024年期间,全球智能机器人市场规模以23.6%的年复合增长率从1583亿元快速扩容至3690亿元,总体扩张一倍之多。
并预计未来五年将继续以22.2%的年均增速增至2029年的10058亿元这是一个成长型的万亿黄金赛道,爆发潜力和想象空间都非常可期。
从产业链环节来看,乐动机器人重点聚焦的视觉感知如同智能机器人的“眼睛”,其重要性可想而知,并且整个细分市场空间也同步得到扩张。

同一数据源显示,全球智能机器人视觉感知技术市场规模也从2020年的136亿元增长至2024年的285亿元,复合年增长率达到20.3%,预计在2029年将达到702亿元。
在如此景气的行业预期中,由华中科大两学霸联合创立,且拥有了一定壁垒优势的乐动机器人也是雄心壮志,并积极寻求更多的助推力量,譬如赴港上市。
据招股资料,乐动机器人拟将募集资金用于加强智能机器人视觉感知技术的研发,以实现人工智能功能算法结构的升级,优化智能机器人视觉感知产品及智能机器人产品,品牌建设与国际拓展,优化生产能力及产能扩充,以及探索潜在投资及收购机会等方面。
聚焦成长性新兴科技赛道,乐动机器人的壁垒具体在哪?牢不牢靠?
华中科大双学霸二次创业!阿里大佬入股
作为一家以感知智能为基础的全栈式智能机器人公司,乐动机器由华中科大机械工程与自动化学子周伟与科学与技术学子郭盖华在2017年联合创立。
其总部坐落的城市——广东深圳,也是目前国内机器人企业数量最多的省份地区。这里的区域集聚效应一定程度上能助力产业链企业通过技术创新与资源整合,加速该区域产业生态的形成,并反哺这些玩家。
更值得一提的是,除去专业的工科技术背景外,两位创始人还曾于2012年创立了聚焦智能平衡车领域乐行天下。这意味乐动机器人的创业团队本身就拥有丰富的创业经历以及技术积累,且这个赛道与目前主攻的视觉感知技术还有是异曲同工之妙的。
同大多技术团队创业的特张类似,乐动机器人也非常注重技术研发,并成功构筑了一定的技术壁垒。
资料显示,乐动机器人已累计申请专利600多项,其中发明专利300多项,PCT20多项;至今其在国内拥有252项重要专利及24项重要软件著作权,覆盖机器人运动控制、机器视觉、深度学习等关键领域。
这些知识产权就是其技术实力的有力证明。并且在产品维度,乐动机器人还成功将这些技术融入产品之中。
在视觉感知技术产品方面,乐动机器人构建了全面且具有创新性的产品矩阵:首创了多款智能机器人激光雷达创新产品,涵盖直接飞行时间(DTOF)激光雷达、三角测量激光雷达、固态线性激光雷达以及四目矩阵传感器模块等。
其中,2024年其DTOF激光雷达出货量超过72万台,位居行业第一。这些传感器产品凭借出色的性能,被广泛应用于家用、商业、工业、医疗及教育等多个领域,为各类智能机器人提供了精准的环境感知能力。
具体来说,其服务了300家下游客户,产品覆盖全球50个国家终端用户,其中包括全球十大服务机器人中的七家,以及全球五大商用机器人企业。
乐动机器人的技术实力不仅体现在硬件产品上,还体现在其算法和软件方面。从2018年开发第一代激光雷达产品和第一代同步定位构图(SLAM)算法开始,其一直在努力构建“传感器+算法+云平台”三位一体的技术体系。
2024年其获批的“一种视觉SLAM方法、装置、机器人及存储介质”专利,标志着其在机器人技术和实时定位与地图构建(SLAM)领域的重要进展,该专利能使机器人在未知环境中高效识别自己位置及周围环境,结合AI大模型和深度学习技术,乐动机器人可开发出更智能的系统。
凭借卓越的技术实力,2024年搭载乐动机器人视觉感知技术的智能机器人数量超过600万台,在同时具备设计及开发整机智能机器人能力的公司中位居首位。乐动机器人也因此成为全球最大的以视觉感知技术为核心的智能机器人公司,市场占有率约1.6%。
得益于公司技术实力背书以及对行业前景的看好,创立9年至今,乐动机器人赢得了不少耐心资本的青睐。
至今,其已完成至少4轮融资,股东包括华业天成、世纪金源集团、厚普资本、源码资本、铭石投资、元璟资本以及阿里CEO吴泳铭控制的圆璟鼎恒等。其中,圆璟鼎恒目前仍持有乐动机器人1.79%的股份。
高歌猛进下的“失血”,IPO迫在眉睫
需要警示的是,耐心资本的耐心也是有限的。
尽管乐动机器人在技术和业务方面取得了显著成就,但目前公司仍面临着诸多风险与挑战。
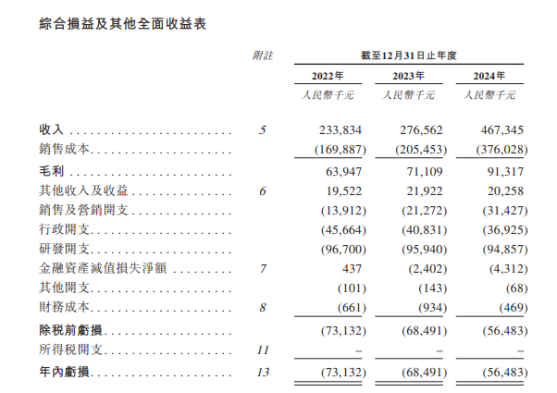
从财务角度来看,乐动机器人虽然营收呈现快速增长态势,2022年至2024年营收分别为2.34亿元、2.77亿元和4.67亿元,年复增长率约为41.4%。增长速度高于行业平均水平,一定程度上反映出其技术和产品在市场上具有较强的竞争力与市场需求。
但同期,其毛利率分别为27.3%、25.7%和19.5%,连年下滑。下降的原因主要包括硬件成本占比上升以及整机业务的拓展。在整机业务方面,为了在市场竞争中取得优势,乐动机器人可能采取了较为激进的市场定价策略,降低产品单价,从而导致毛利率受到影响。
至今乐动机器人仍处于亏损状态。过去三年亏损累计达1.98亿元,亏损逐年从7313.2万元收窄至5648.3万元下,但2024年亏损率仍高达12.1%。
流动性上,2024年仅录得经营活动现金净流出2910万元,这进一步凸显了乐动机器人通过IPO融资以缓解资金紧张局面、支持业务持续发展的紧迫性。
乐动机器人的赴港IPO,是其高速成长故事寻求资本助力的关键一跃。深耕视觉感知核心技术,绑定头部客户,坐拥行业第一的搭载量,是其吸引“耐心资本”的底气。
然而,投资者必须清醒认识到硬币的另一面:41.4%的营收高增速背后,是19.5%且持续下滑的毛利率和累计近2亿元的亏损。这既是技术企业成长的典型特征,也预示着未来盈利拐点的巨大压力。
上市募资为其提供了加注研发、优化产能、拓展市场的弹药,但如何有效利用这些资源,在保持技术领先的同时,尽快实现从“烧钱换市场”到“技术创利润”的跨越,将是决定乐动长期投资价值、检验“耐心资本”忍耐力的终极标尺。万亿赛道的门票已握手中,盈利模式的答卷亟待书写。
相关文章:
从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。 以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...
【Redis技术进阶之路】「原理分析系列开篇」分析客户端和服务端网络诵信交互实现(服务端执行命令请求的过程 - 初始化服务器)
服务端执行命令请求的过程 【专栏简介】【技术大纲】【专栏目标】【目标人群】1. Redis爱好者与社区成员2. 后端开发和系统架构师3. 计算机专业的本科生及研究生 初始化服务器1. 初始化服务器状态结构初始化RedisServer变量 2. 加载相关系统配置和用户配置参数定制化配置参数案…...

关于iview组件中使用 table , 绑定序号分页后序号从1开始的解决方案
问题描述:iview使用table 中type: "index",分页之后 ,索引还是从1开始,试过绑定后台返回数据的id, 这种方法可行,就是后台返回数据的每个页面id都不完全是按照从1开始的升序,因此百度了下,找到了…...

前端导出带有合并单元格的列表
// 导出async function exportExcel(fileName "共识调整.xlsx") {// 所有数据const exportData await getAllMainData();// 表头内容let fitstTitleList [];const secondTitleList [];allColumns.value.forEach(column > {if (!column.children) {fitstTitleL…...

pam_env.so模块配置解析
在PAM(Pluggable Authentication Modules)配置中, /etc/pam.d/su 文件相关配置含义如下: 配置解析 auth required pam_env.so1. 字段分解 字段值说明模块类型auth认证类模块,负责验证用户身份&am…...

Objective-C常用命名规范总结
【OC】常用命名规范总结 文章目录 【OC】常用命名规范总结1.类名(Class Name)2.协议名(Protocol Name)3.方法名(Method Name)4.属性名(Property Name)5.局部变量/实例变量(Local / Instance Variables&…...

【解密LSTM、GRU如何解决传统RNN梯度消失问题】
解密LSTM与GRU:如何让RNN变得更聪明? 在深度学习的世界里,循环神经网络(RNN)以其卓越的序列数据处理能力广泛应用于自然语言处理、时间序列预测等领域。然而,传统RNN存在的一个严重问题——梯度消失&#…...

2024年赣州旅游投资集团社会招聘笔试真
2024年赣州旅游投资集团社会招聘笔试真 题 ( 满 分 1 0 0 分 时 间 1 2 0 分 钟 ) 一、单选题(每题只有一个正确答案,答错、不答或多答均不得分) 1.纪要的特点不包括()。 A.概括重点 B.指导传达 C. 客观纪实 D.有言必录 【答案】: D 2.1864年,()预言了电磁波的存在,并指出…...
Opencv中的addweighted函数
一.addweighted函数作用 addweighted()是OpenCV库中用于图像处理的函数,主要功能是将两个输入图像(尺寸和类型相同)按照指定的权重进行加权叠加(图像融合),并添加一个标量值&#x…...
【第二十一章 SDIO接口(SDIO)】
第二十一章 SDIO接口 目录 第二十一章 SDIO接口(SDIO) 1 SDIO 主要功能 2 SDIO 总线拓扑 3 SDIO 功能描述 3.1 SDIO 适配器 3.2 SDIOAHB 接口 4 卡功能描述 4.1 卡识别模式 4.2 卡复位 4.3 操作电压范围确认 4.4 卡识别过程 4.5 写数据块 4.6 读数据块 4.7 数据流…...

蓝桥杯 2024 15届国赛 A组 儿童节快乐
P10576 [蓝桥杯 2024 国 A] 儿童节快乐 题目描述 五彩斑斓的气球在蓝天下悠然飘荡,轻快的音乐在耳边持续回荡,小朋友们手牵着手一同畅快欢笑。在这样一片安乐祥和的氛围下,六一来了。 今天是六一儿童节,小蓝老师为了让大家在节…...
【大模型RAG】Docker 一键部署 Milvus 完整攻略
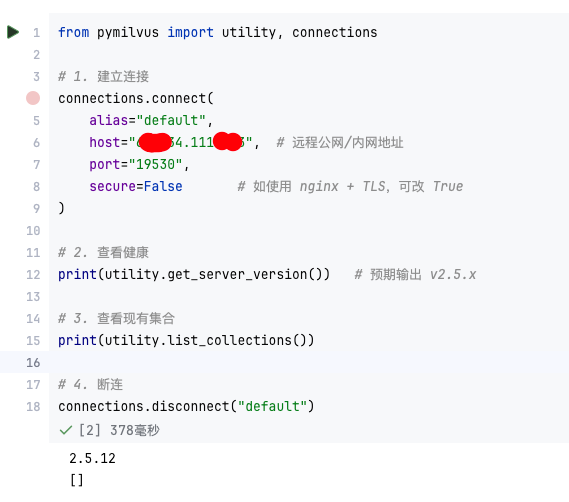
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...
高频面试之3Zookeeper
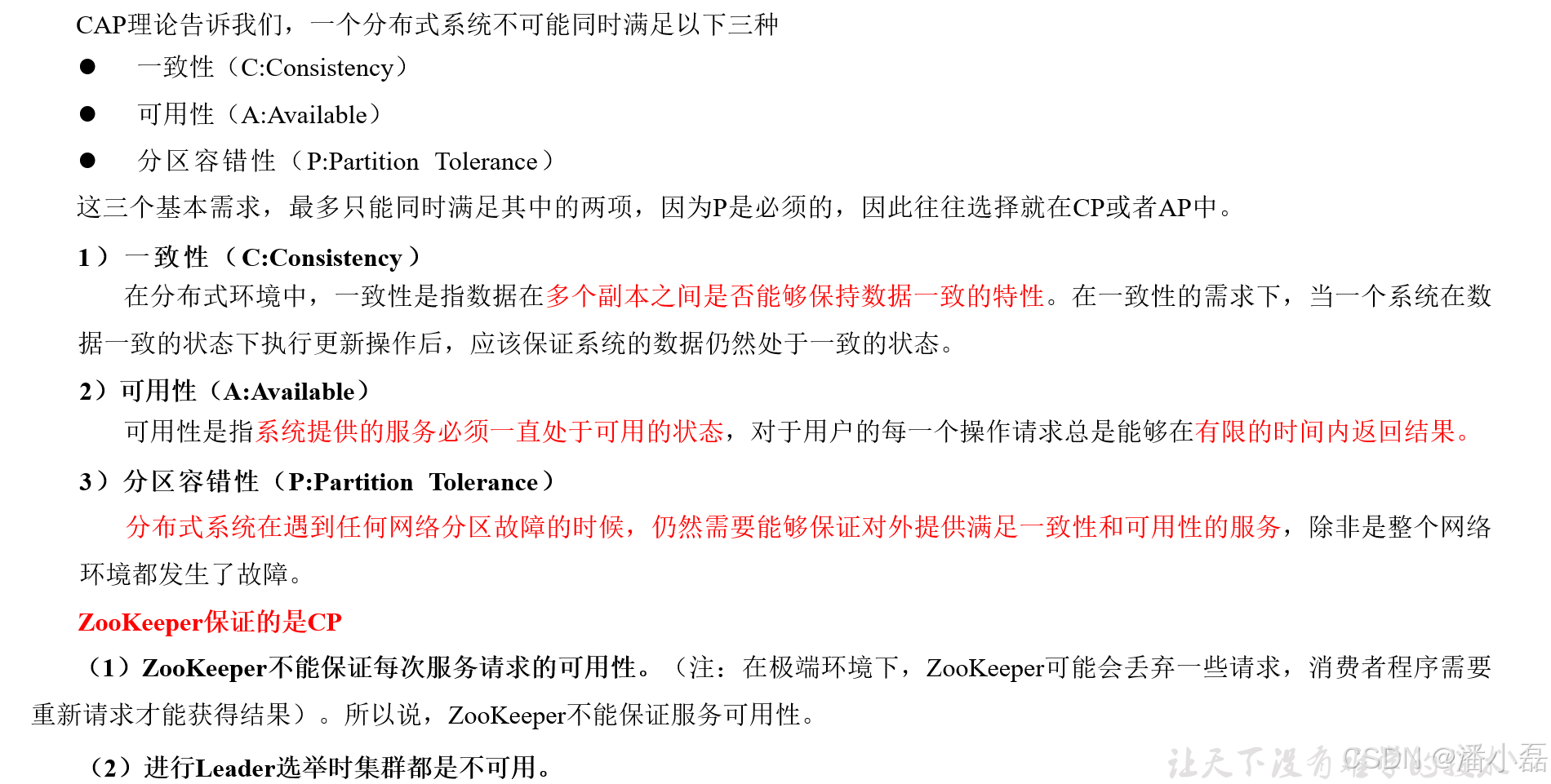
高频面试之3Zookeeper 文章目录 高频面试之3Zookeeper3.1 常用命令3.2 选举机制3.3 Zookeeper符合法则中哪两个?3.4 Zookeeper脑裂3.5 Zookeeper用来干嘛了 3.1 常用命令 ls、get、create、delete、deleteall3.2 选举机制 半数机制(过半机制࿰…...

1688商品列表API与其他数据源的对接思路
将1688商品列表API与其他数据源对接时,需结合业务场景设计数据流转链路,重点关注数据格式兼容性、接口调用频率控制及数据一致性维护。以下是具体对接思路及关键技术点: 一、核心对接场景与目标 商品数据同步 场景:将1688商品信息…...

Leetcode 3577. Count the Number of Computer Unlocking Permutations
Leetcode 3577. Count the Number of Computer Unlocking Permutations 1. 解题思路2. 代码实现 题目链接:3577. Count the Number of Computer Unlocking Permutations 1. 解题思路 这一题其实就是一个脑筋急转弯,要想要能够将所有的电脑解锁&#x…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...

连锁超市冷库节能解决方案:如何实现超市降本增效
在连锁超市冷库运营中,高能耗、设备损耗快、人工管理低效等问题长期困扰企业。御控冷库节能解决方案通过智能控制化霜、按需化霜、实时监控、故障诊断、自动预警、远程控制开关六大核心技术,实现年省电费15%-60%,且不改动原有装备、安装快捷、…...
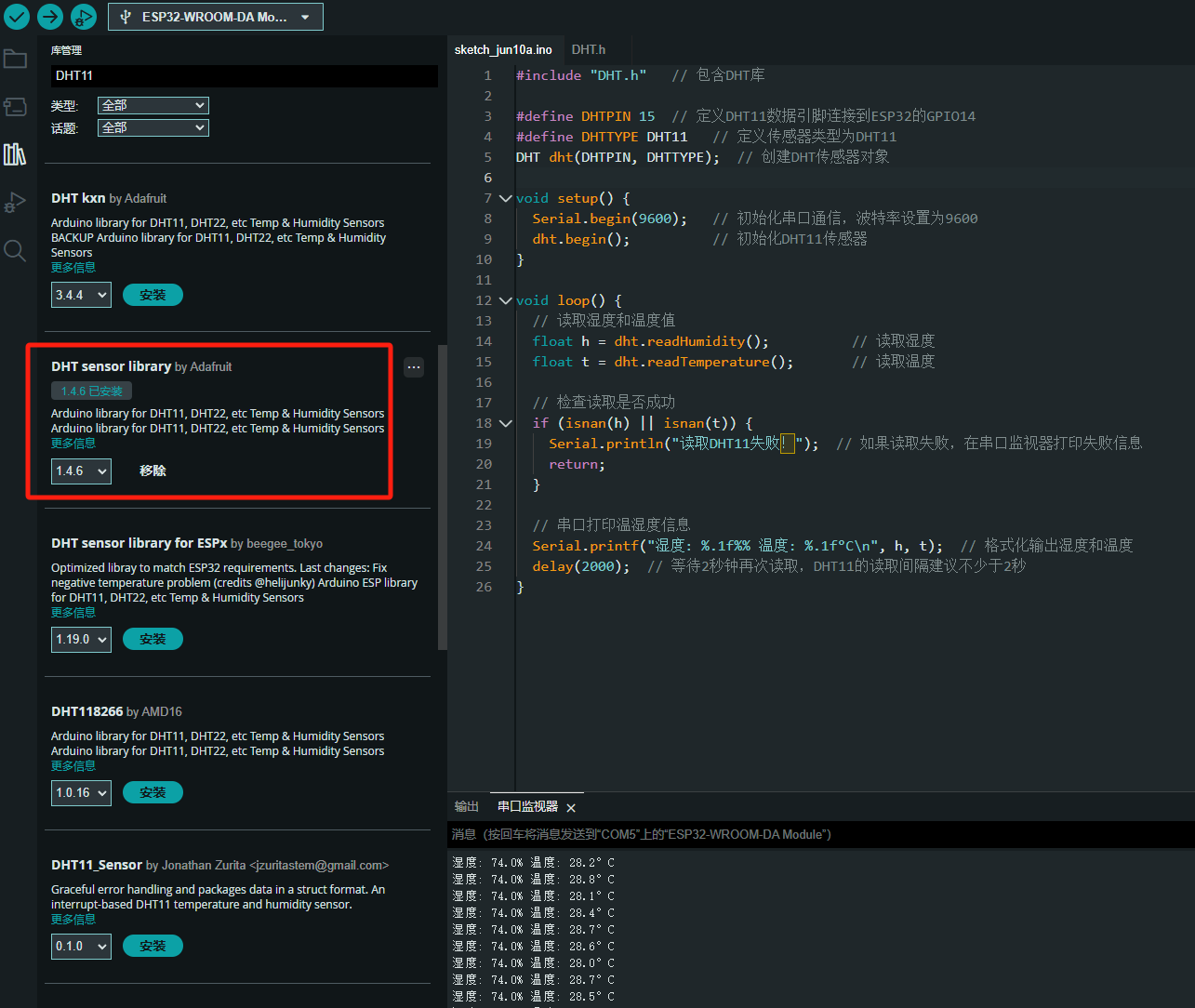
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...
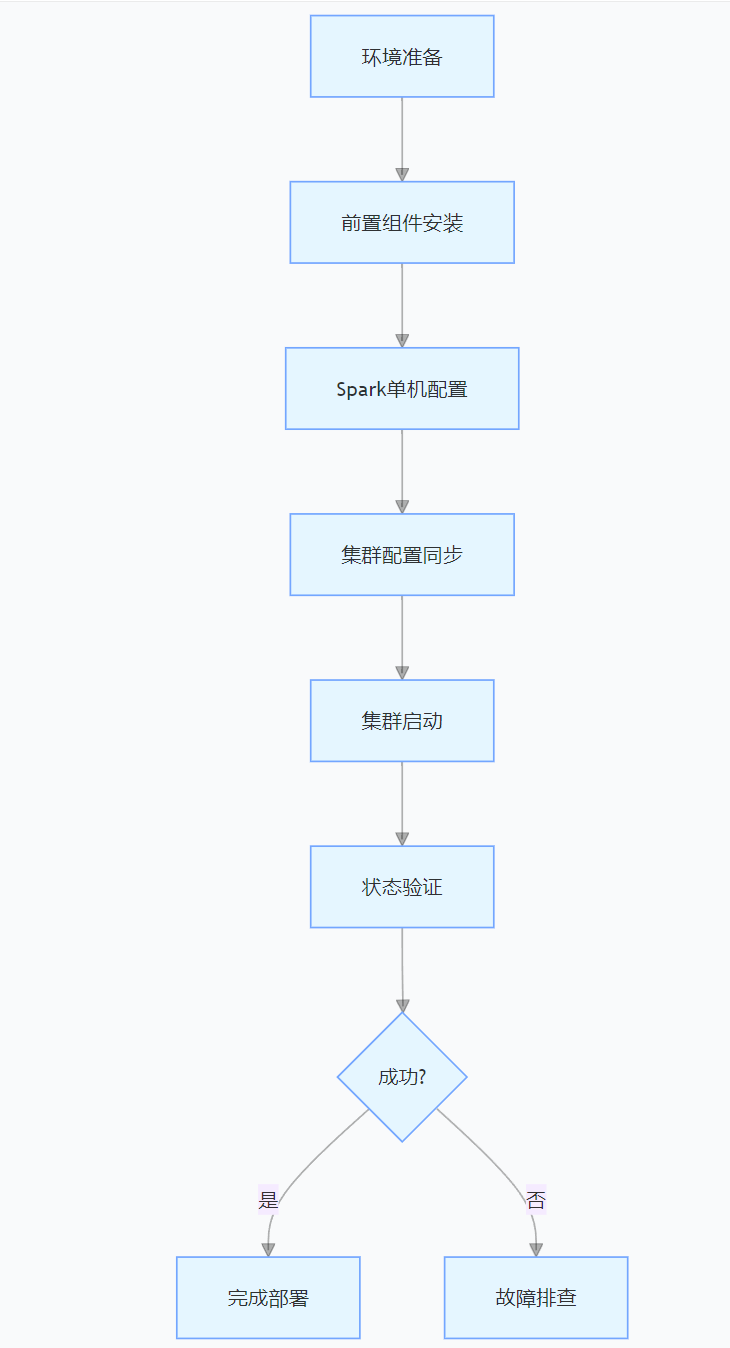
CentOS下的分布式内存计算Spark环境部署
一、Spark 核心架构与应用场景 1.1 分布式计算引擎的核心优势 Spark 是基于内存的分布式计算框架,相比 MapReduce 具有以下核心优势: 内存计算:数据可常驻内存,迭代计算性能提升 10-100 倍(文档段落:3-79…...

汽车生产虚拟实训中的技能提升与生产优化
在制造业蓬勃发展的大背景下,虚拟教学实训宛如一颗璀璨的新星,正发挥着不可或缺且日益凸显的关键作用,源源不断地为企业的稳健前行与创新发展注入磅礴强大的动力。就以汽车制造企业这一极具代表性的行业主体为例,汽车生产线上各类…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...

条件运算符
C中的三目运算符(也称条件运算符,英文:ternary operator)是一种简洁的条件选择语句,语法如下: 条件表达式 ? 表达式1 : 表达式2• 如果“条件表达式”为true,则整个表达式的结果为“表达式1”…...

系统设计 --- MongoDB亿级数据查询优化策略
系统设计 --- MongoDB亿级数据查询分表策略 背景Solution --- 分表 背景 使用audit log实现Audi Trail功能 Audit Trail范围: 六个月数据量: 每秒5-7条audi log,共计7千万 – 1亿条数据需要实现全文检索按照时间倒序因为license问题,不能使用ELK只能使用…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

STM32F4基本定时器使用和原理详解
STM32F4基本定时器使用和原理详解 前言如何确定定时器挂载在哪条时钟线上配置及使用方法参数配置PrescalerCounter ModeCounter Periodauto-reload preloadTrigger Event Selection 中断配置生成的代码及使用方法初始化代码基本定时器触发DCA或者ADC的代码讲解中断代码定时启动…...

JVM垃圾回收机制全解析
Java虚拟机(JVM)中的垃圾收集器(Garbage Collector,简称GC)是用于自动管理内存的机制。它负责识别和清除不再被程序使用的对象,从而释放内存空间,避免内存泄漏和内存溢出等问题。垃圾收集器在Ja…...
【机器视觉】单目测距——运动结构恢复
ps:图是随便找的,为了凑个封面 前言 在前面对光流法进行进一步改进,希望将2D光流推广至3D场景流时,发现2D转3D过程中存在尺度歧义问题,需要补全摄像头拍摄图像中缺失的深度信息,否则解空间不收敛…...