如何在3ds max中创建可用于真人场景的巨型机器人:第 3 部分
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景
1. 创建腿部装备
步骤 1
打开 3ds Max。 打开在本教程最后一部分中保存的文件。
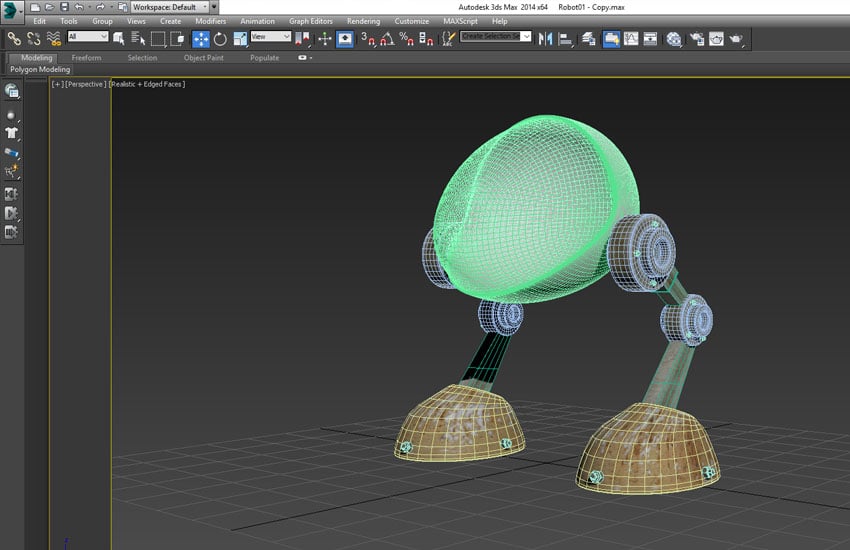
打开 3ds Max
步骤 2
转到创建> 系统并单击骨骼。
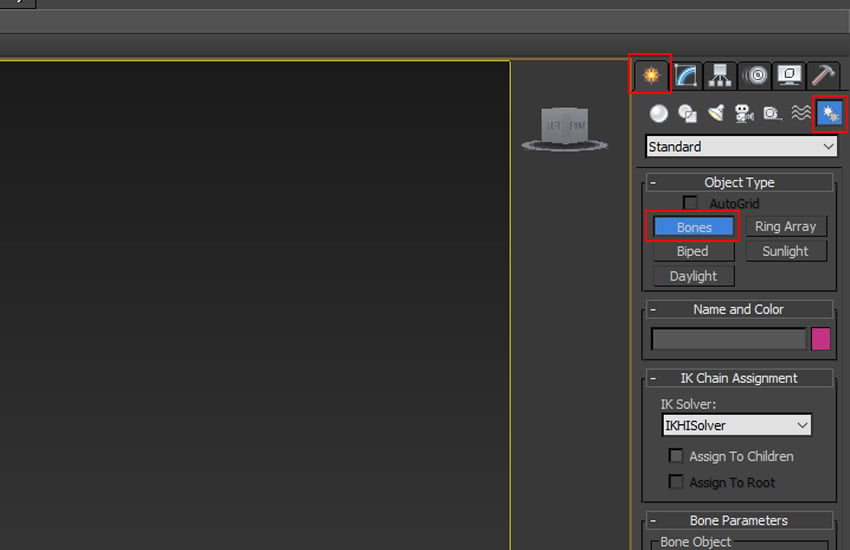
创建>系统
步骤 3
为的 侧视口中的腿,如下图所示。
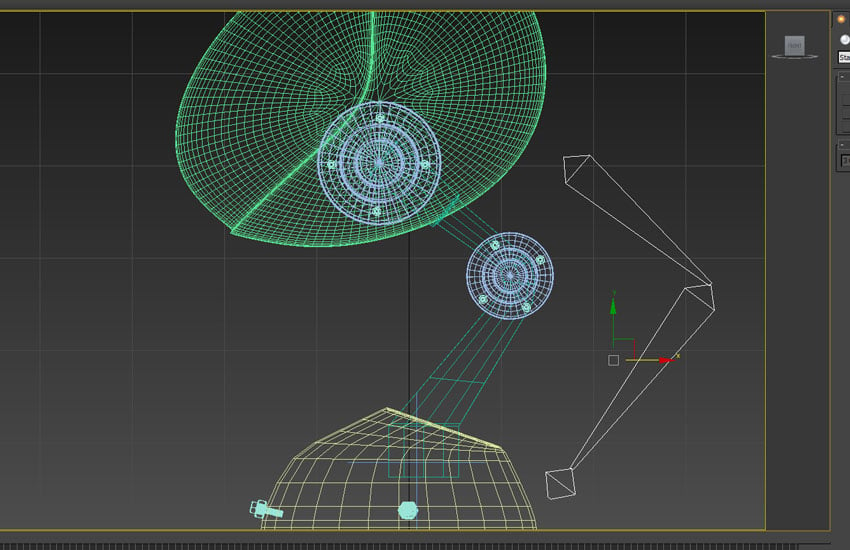
画骨头
步骤 4
与顶骨 选中后,转到动画> IK 求解器> HI 求解器。
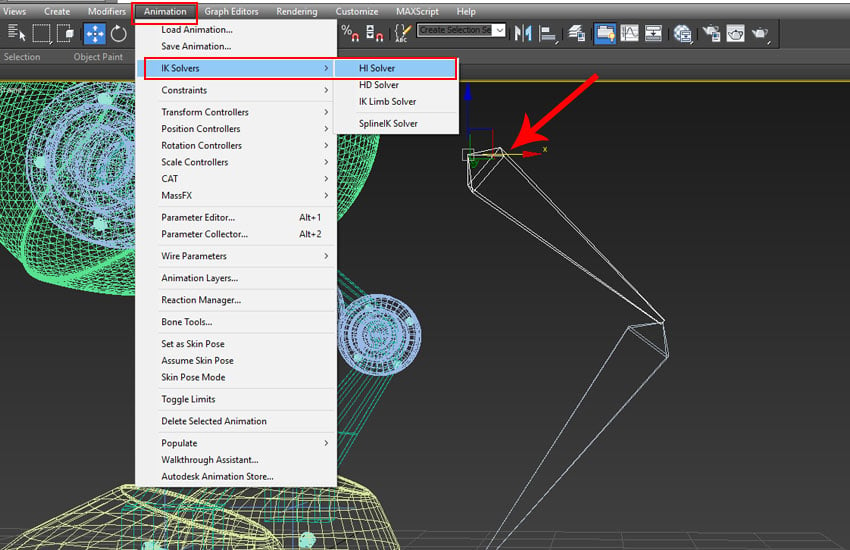
动画> IK 求解器 > HI 求解器
步骤 5
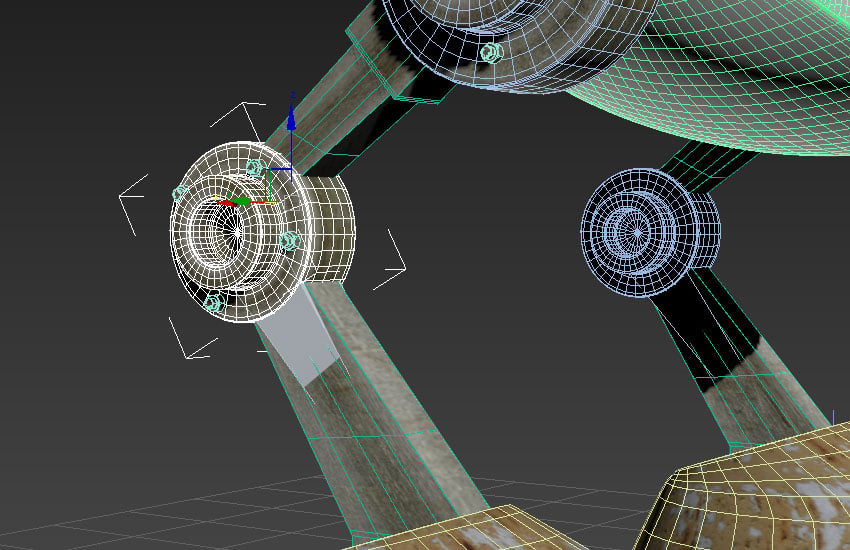
单击最后一块骨头 以创建 IK 链,如下图所示。
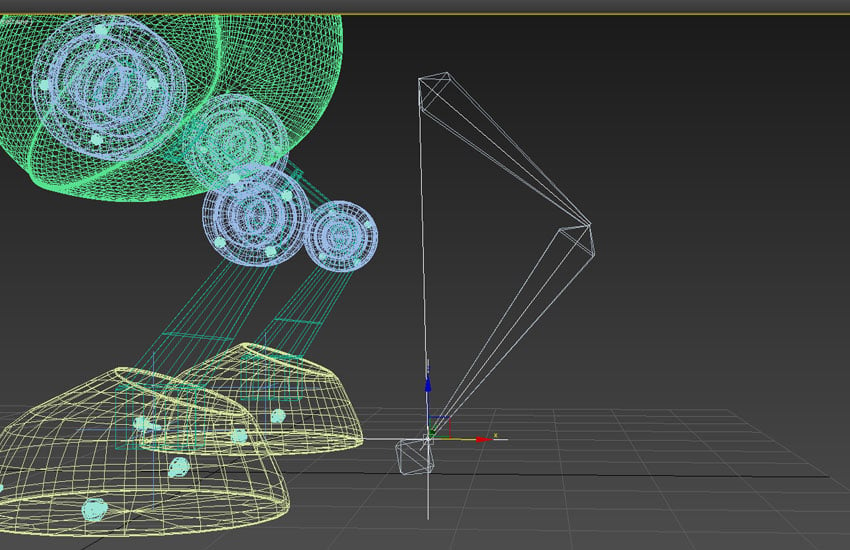
IK链
步骤 6
使用整个钻机和 IK 链已选中,将它们拖到左腿内。
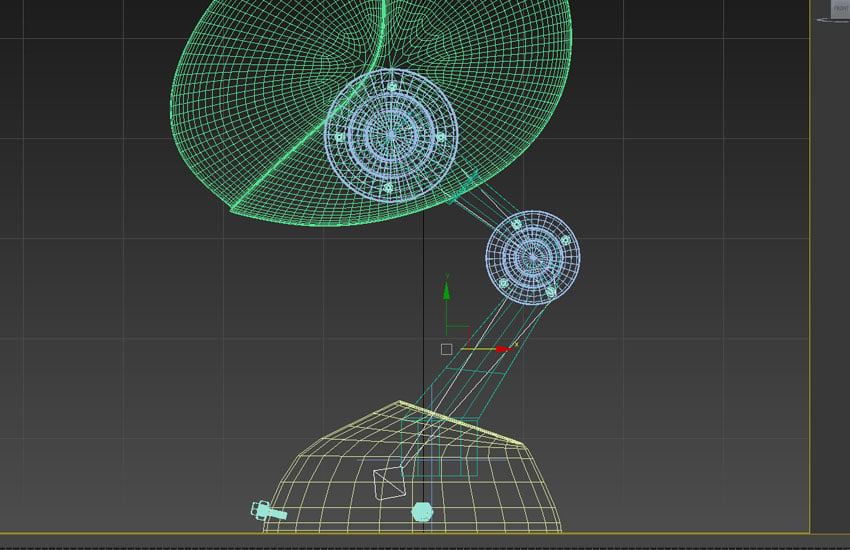
IK链
2. 为脚创建附着约束
步骤 1
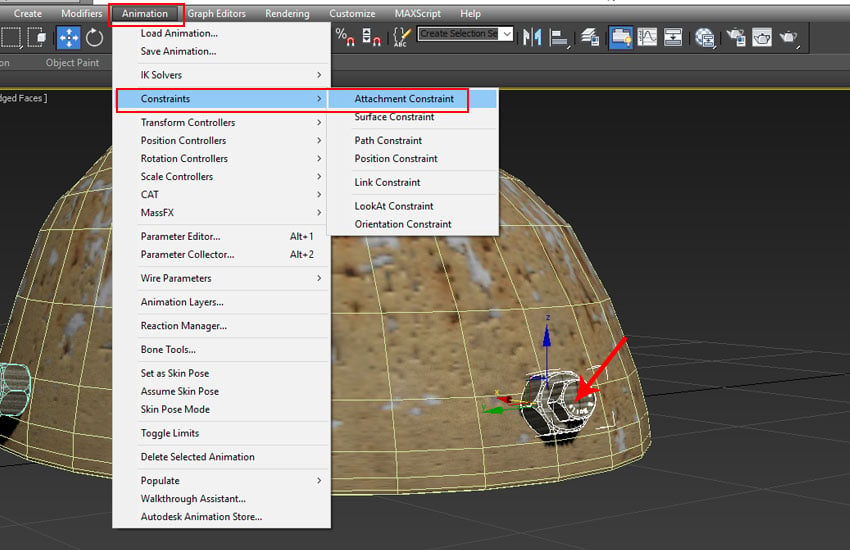
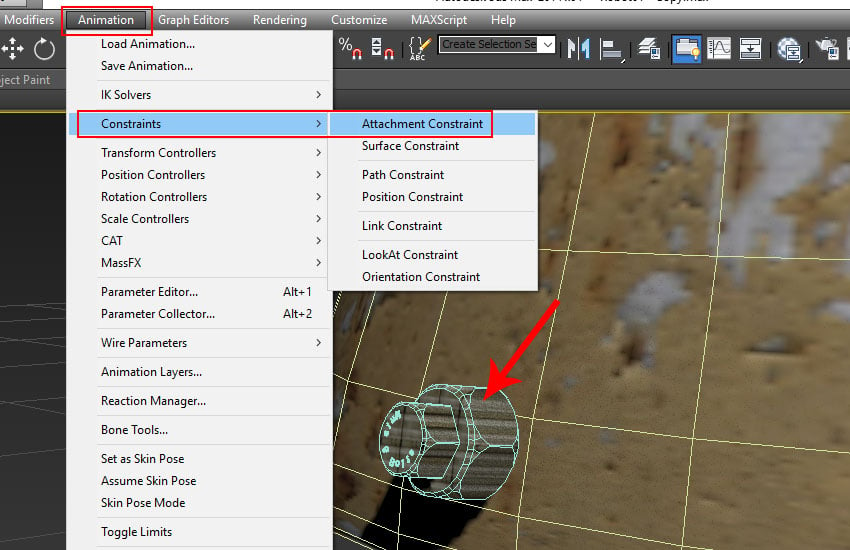
用第一个螺母和 选择螺栓,转到动画>约束>附件约束,然后单击机器人的左脚。
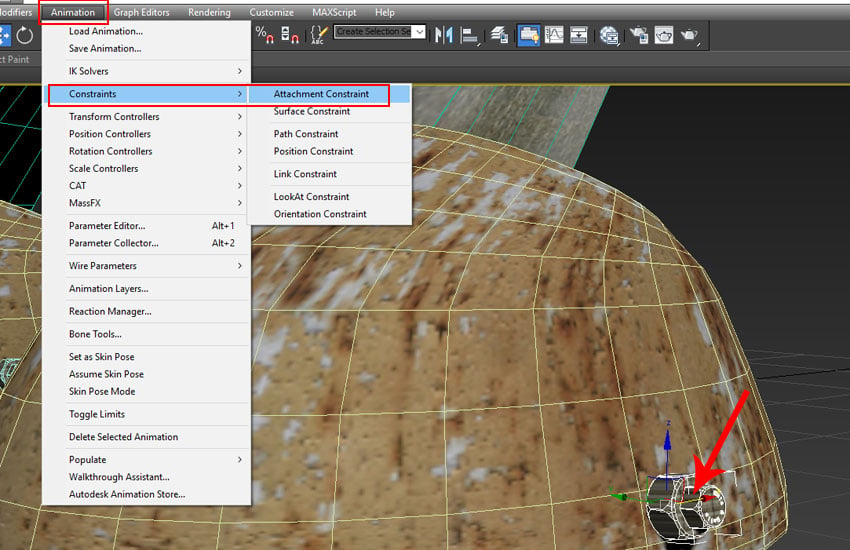
动画>约束>附件约束
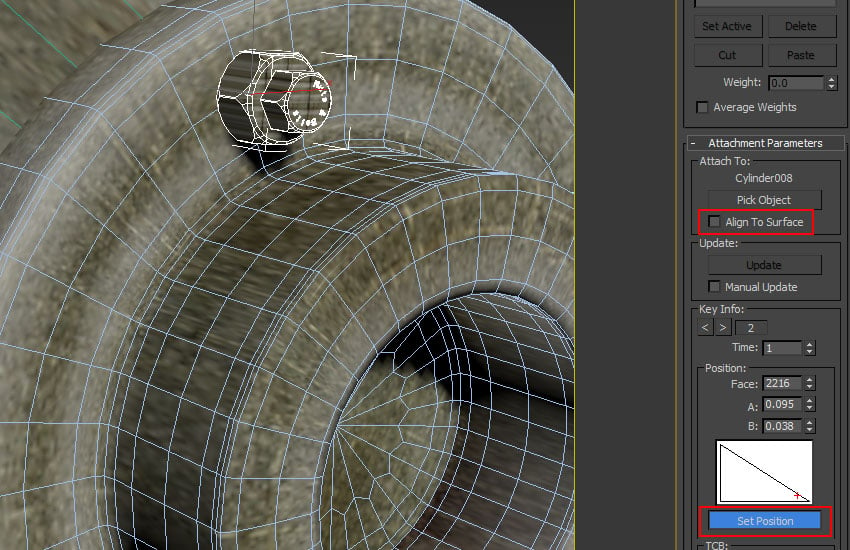
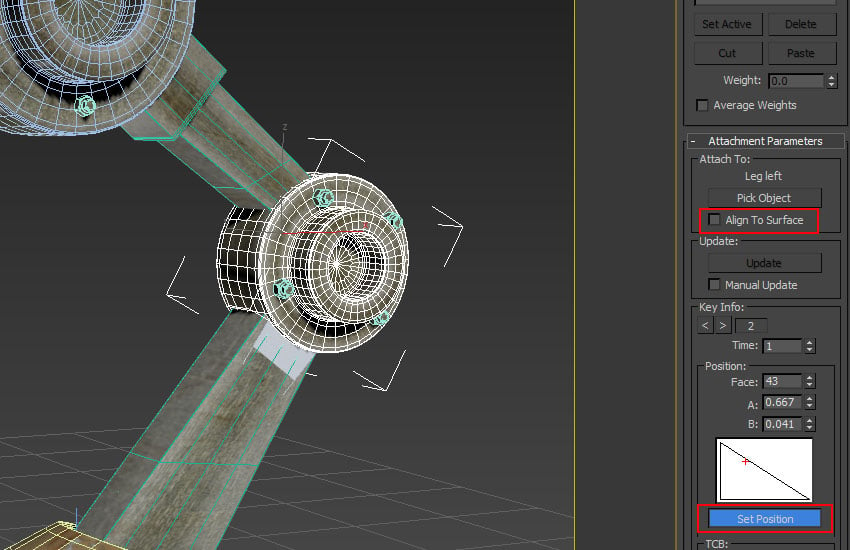
步骤 2
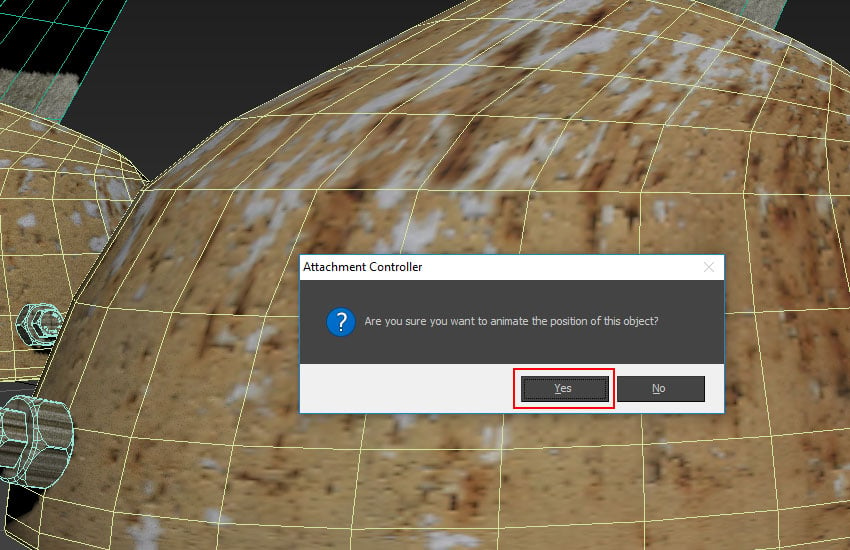
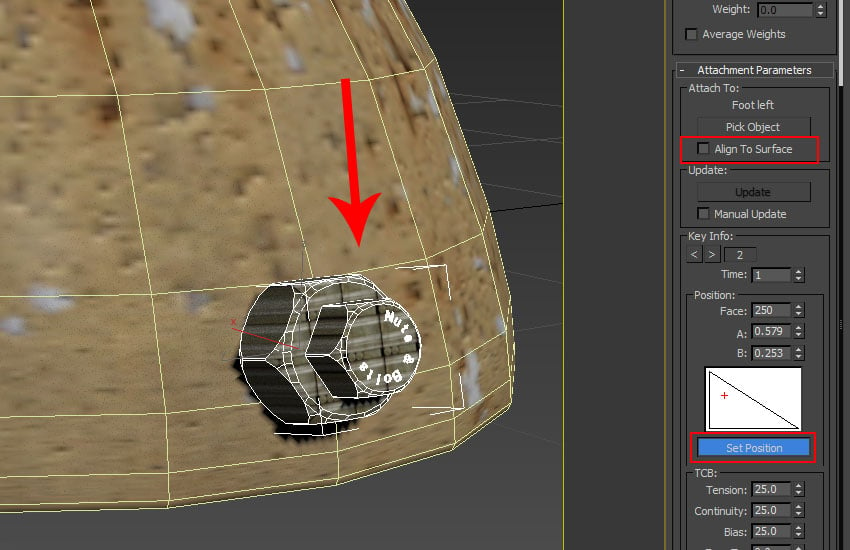
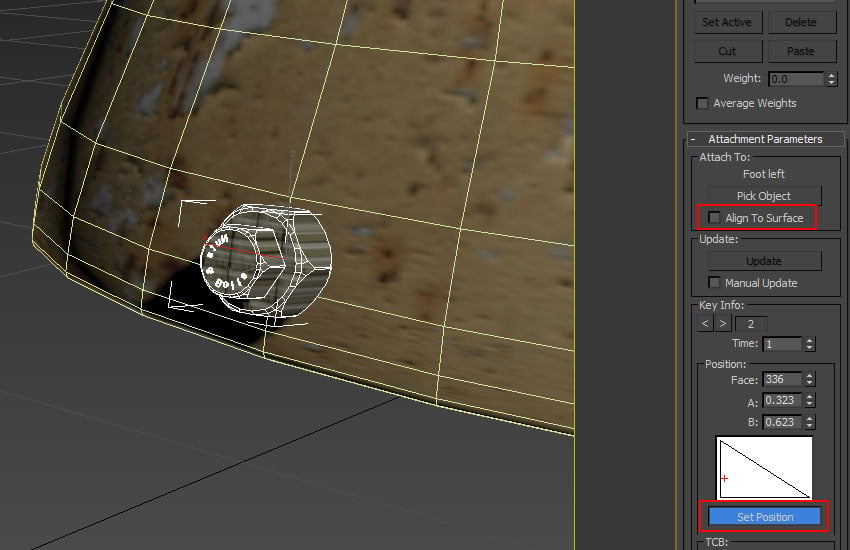
单击设置位置并尝试通过将鼠标拖动到上来设置螺母和螺栓的位置 左脚。获得正确位置后,关闭“对齐曲面”选项。
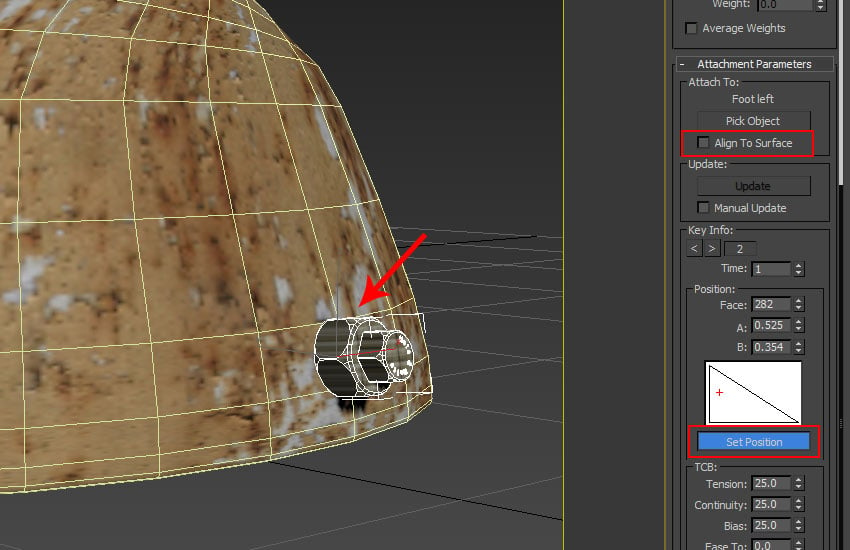
对齐到曲面
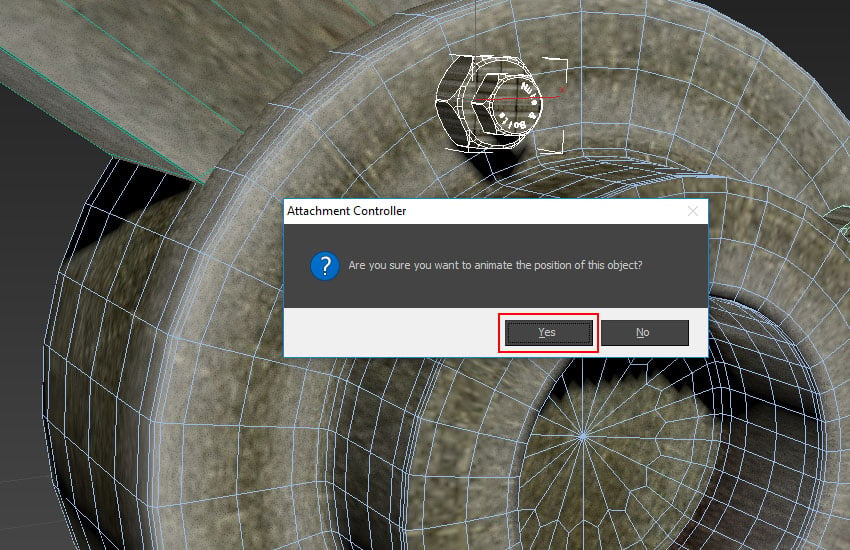
步骤 3
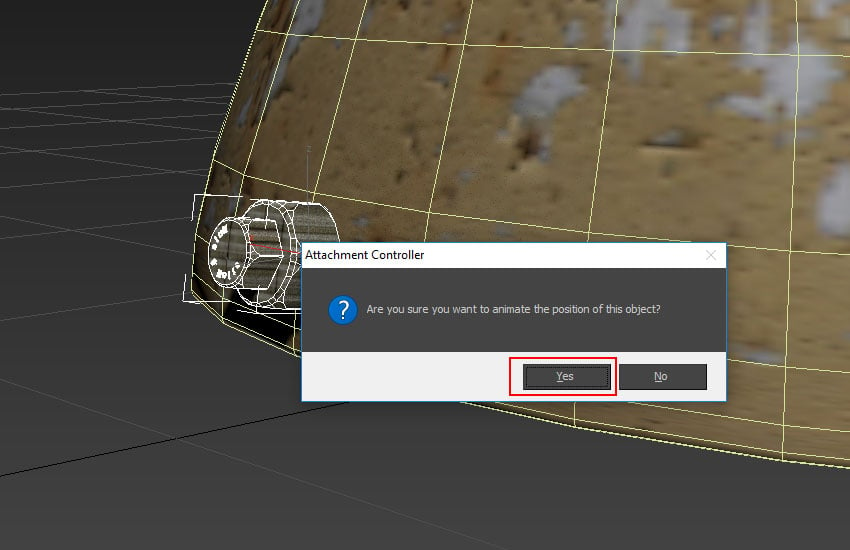
对话框将 出现以确认动画。只需单击是。
动画确认
步骤 4
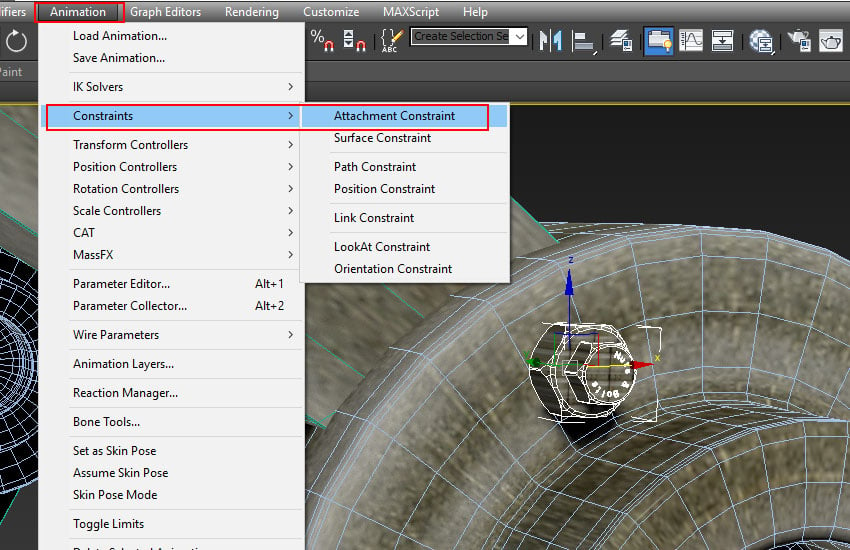
用第二个螺母和 选择螺栓,转到动画>约束>附件约束,然后单击机器人的左脚。
动画>约束>附件约束
步骤 5
单击设置位置并尝试通过将鼠标拖动到上来设置螺母和螺栓的位置 左脚。获得正确位置后,关闭“对齐曲面”选项。
Set Position
步骤 6
对话框将 出现以确认动画。只需单击是。
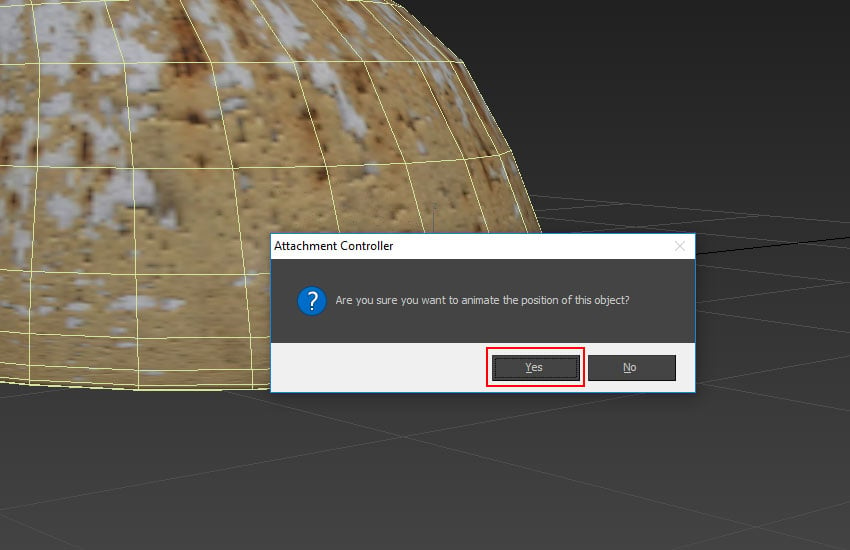
动画确认
步骤 7
用第三个螺母和 选择螺栓,转到动画>约束>附件约束,然后单击机器人的左脚。
动画>约束>附件约束
步骤 8
单击设置位置并尝试通过将鼠标拖动到上来设置螺母和螺栓的位置 左脚。获得正确位置后,关闭“对齐曲面”选项。
“对齐到表面”选项
步骤 9
对话框将 出现以确认动画。只需单击是。
动画确认
3. 为手创建附件约束
步骤 1
用第一个螺母和 选择螺栓,转到动画>约束>附件约束,然后单击机器人的左侧。
动画>约束>附件约束
步骤 2
单击设置位置并尝试通过将鼠标拖动到上来设置螺母和螺栓的位置 左手。获得正确位置后,关闭“对齐曲面”选项。
对齐到曲面
步骤 3
对话框将 出现以确认动画。只需单击是。
动画确认
步骤 4
遵循同样的方式, 还为其余螺母和螺栓创建连接约束。
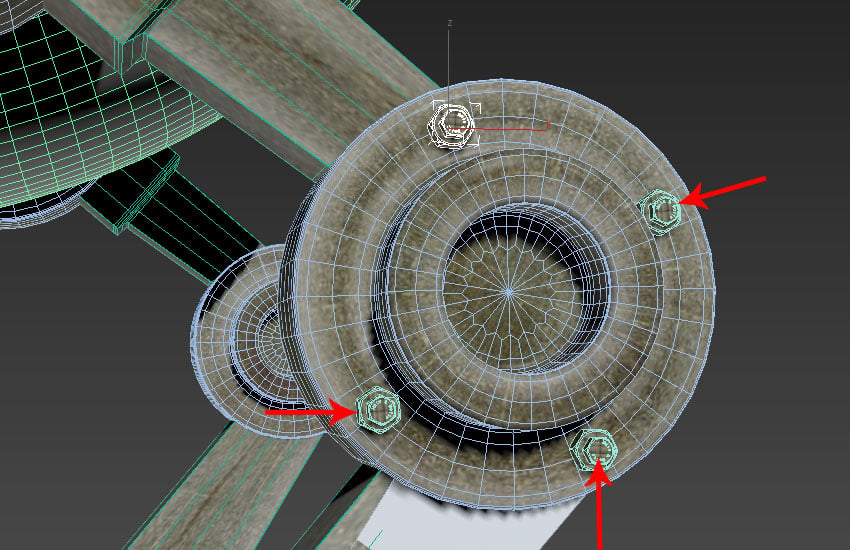
为其余螺母和螺栓创建连接约束
步骤 4
以后 同样,为右腿创建装备并创建附件 右手以及螺母和螺栓的限制。
为右腿创建装备
4. 申请 皮肤修饰剂
步骤 1
跟 选择左腿,转到修改器列表并选择皮肤修改器。
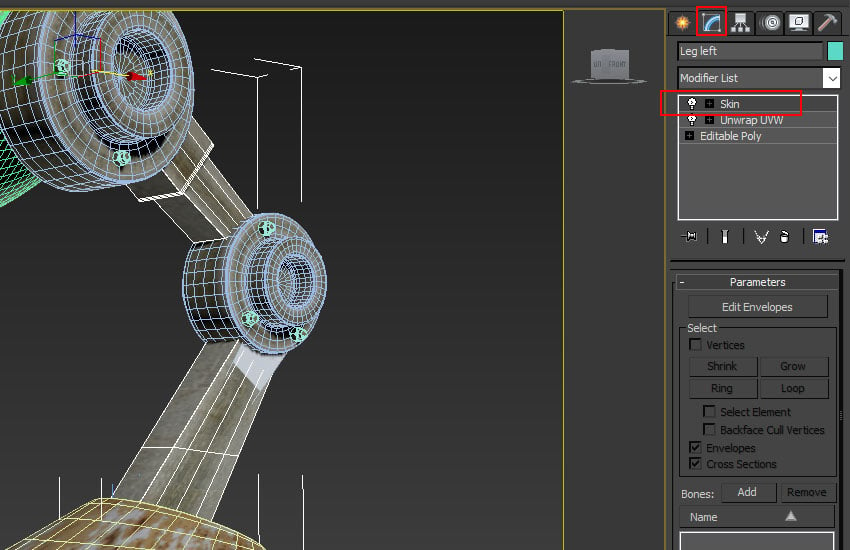
修饰符列表
步骤 2
里面 皮肤修改器选项卡,单击添加按钮。它打开选择 骨头窗口。选择所有三个骨骼,然后单击“选择”。
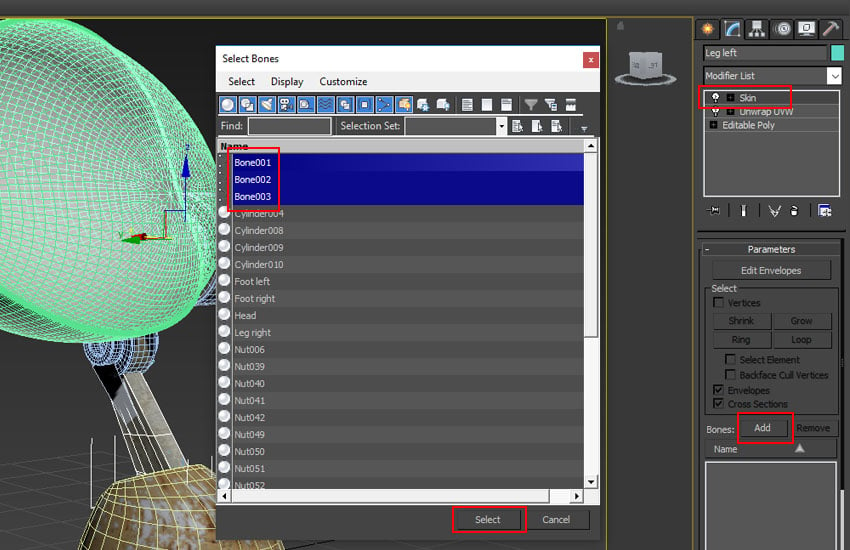
选择骨骼窗口
步骤 3
现在 您可以在列表中看到三块骨头。
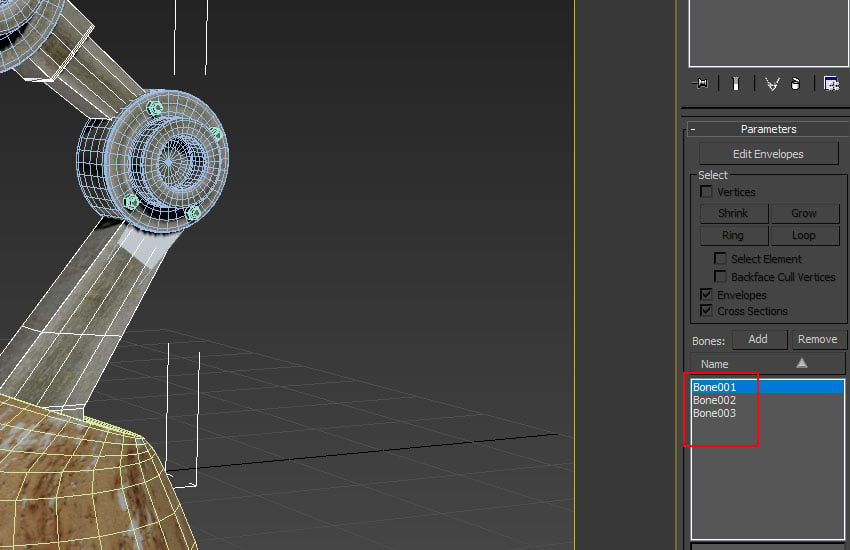
列表中的三块骨头
步骤 4
重复 右侧腿部的过程相同。

重复相同的过程
5. 为脚踝创建连接约束
步骤 1
有脚踝网 选中,转到动画>约束>附件约束和 然后点击机器人的手。

动画>约束>附件约束
步骤 2
单击设置位置并尝试通过将鼠标拖动到上来设置螺母和螺栓的位置 左手。获得正确位置后,关闭“对齐曲面”选项。
对齐到曲面
步骤 3
遵循相同的过程 对于右侧的脚踝网也。
遵循相同的过程
5. 创建假人
步骤 1
转到创建> 助手>假人并为双脚创建两个假人,如 下图。
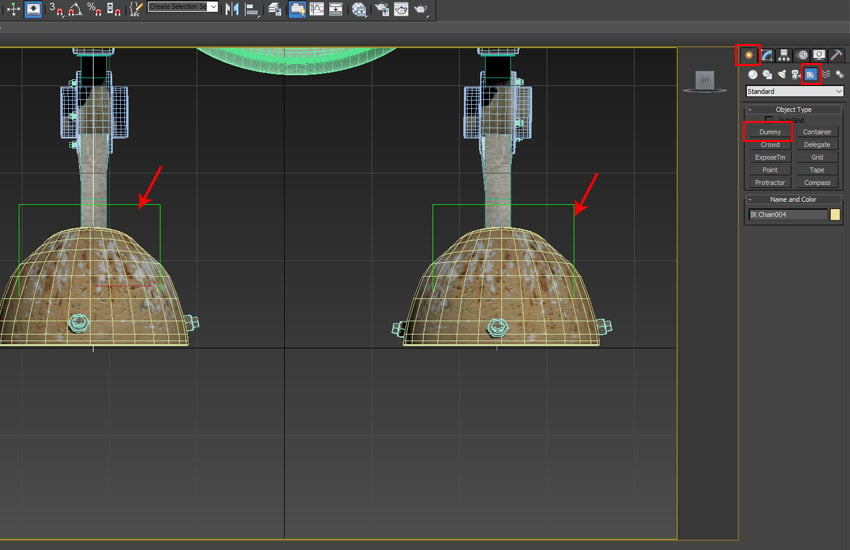
创建>助手>虚拟
步骤 2
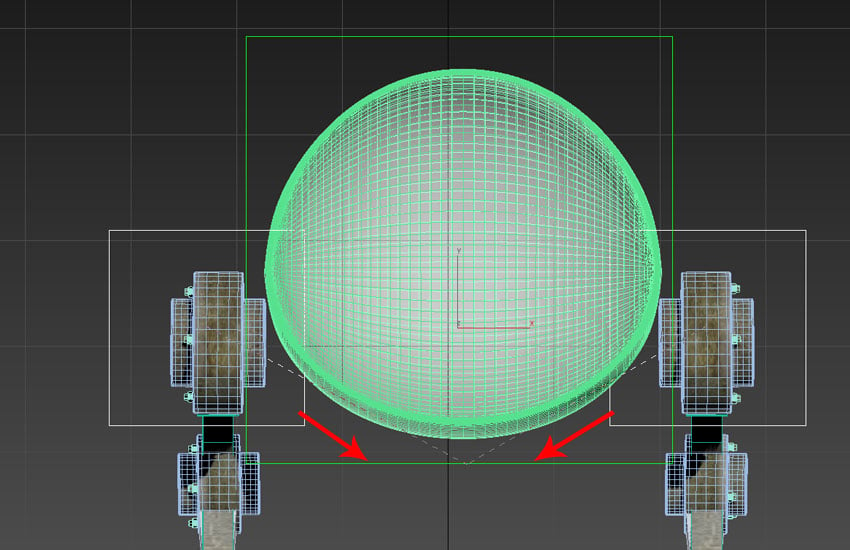
使用两个IK链 选定,将它们与其各自的假人链接,如下所示 图像。

链接假人
步骤 3
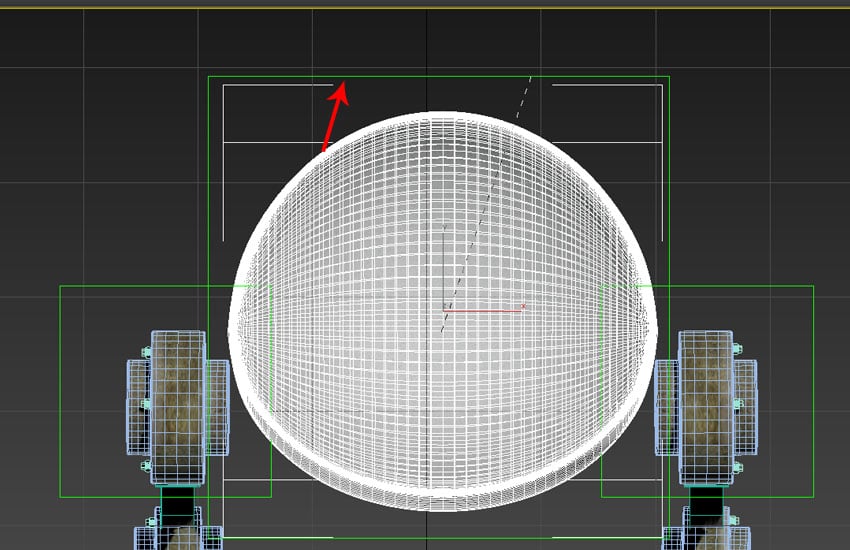
再创建三个 头部和双肩的假人,如下图所示。

再创建三个假人
步骤 4
双肩 选择的假人,将它们链接到头部假人,如下图所示。
链接肩部假人
步骤 5
链接的头部 机器人到头假人。
将机器人的头部连接到头部假人
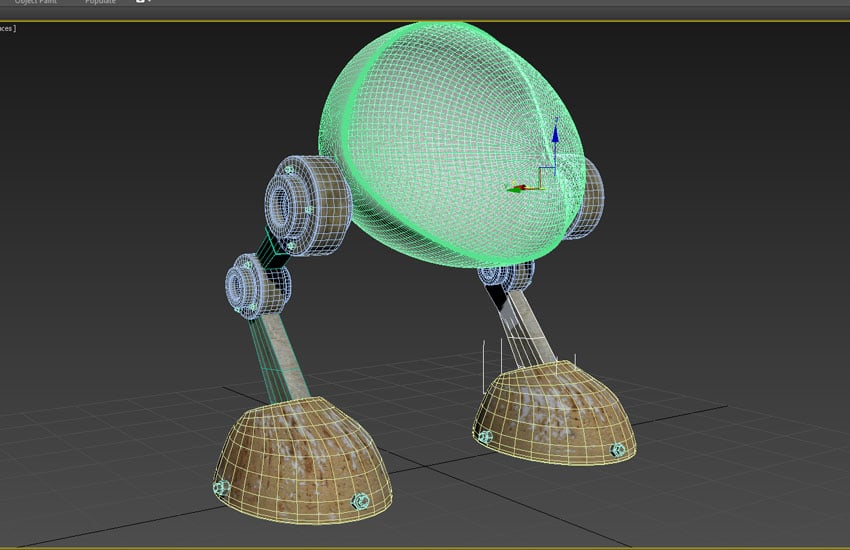
步骤 6
索具完成 现在。您可以通过移动脚和头部假人来检查索具。机器人 现在可以制作动画了。
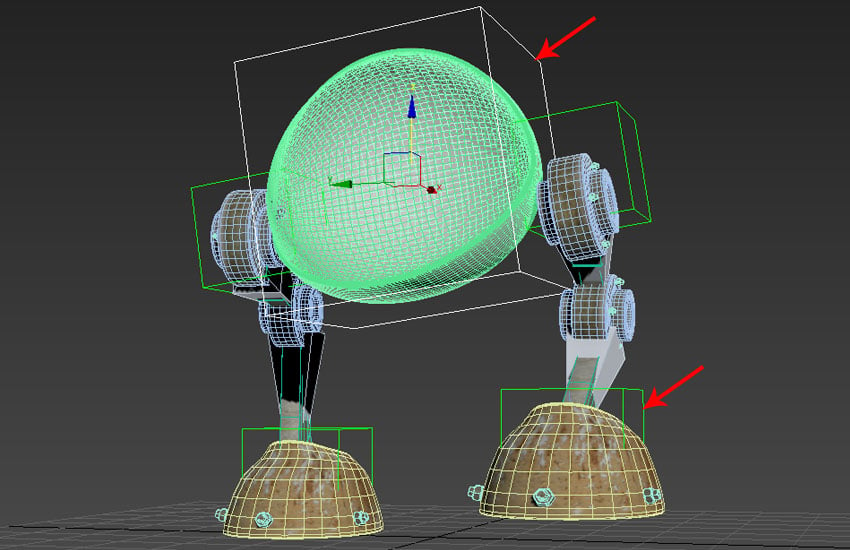
索具完成
结论
创建绑定和约束是动画的重要组成部分,因为它使动画过程变得容易。在本教程的下一部分中,我将向您展示如何创建机器人的动画。
原文链接:如何在3ds max中创建可用于真人场景的巨型机器人:第 3 部分 (mvrlink.com)
相关文章:
如何在3ds max中创建可用于真人场景的巨型机器人:第 3 部分
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 创建腿部装备 步骤 1 打开 3ds Max。 打开在本教程最后一部分中保存的文件。 打开 3ds Max 步骤 2 转到创建> 系统并单击骨骼。 创建>系统 步骤 3 为的 侧视口中的腿,如下图所示…...
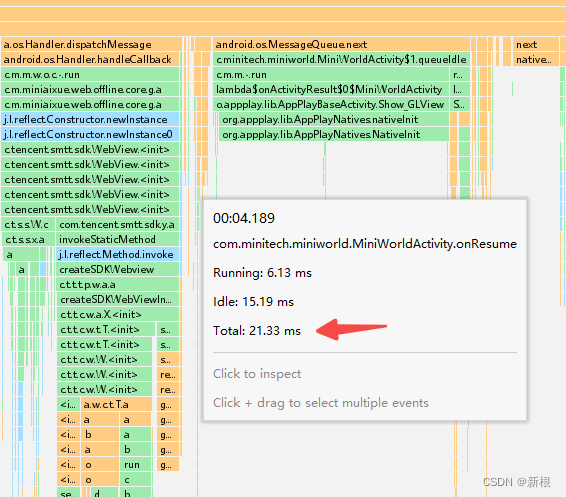
Android性能优化之游戏引擎初始化ANR
近期,着手对bugly上的anr 处理,记录下优化的方向。 借用网上的一张图: 这里的anr 问题是属于主线程的call 耗时操作。需要使用trace 来获取发生anr前一些列的耗时方法调用时间,再次梳理业务,才可能解决。 问题1 ja…...

Jmap-JVM(十六)
上篇文章说了ZGC是jdk11加入的,他是未来jvm垃圾收集器的奠定者,满足TB级别内存处理,STW时间保持在10ms以下。 Jmap 我们可以先通过jmap -histo 进程ip 来查看,但是这样看不太清晰,我们可以用这行命令生成一个文件&…...

【分布式能源的选址与定容】基于多目标粒子群算法分布式电源选址定容规划研究(Matlab代码实现)
目录 💥1 概述 1.1 功率损耗 编辑1.2 电压质量 1.3 DG总容量 📚2 运行结果 🌈3 Matlab代码实现 🎉4 参考文献 💥1 概述 参考文献: 本文采用的是换一个算法解决, 基于基于多目标粒子群算法分布…...

flink源码分析-获取JVM最大堆内存
flink版本: flink-1.11.2 代码位置: org.apache.flink.runtime.util.EnvironmentInformation#getMaxJvmHeapMemory 如果设置了-Xmx参数,就返回这个参数,如果没设置就返回机器物理内存的1/4. 这里主要看各个机器内存的获取方法。 /*** The maximum JVM…...
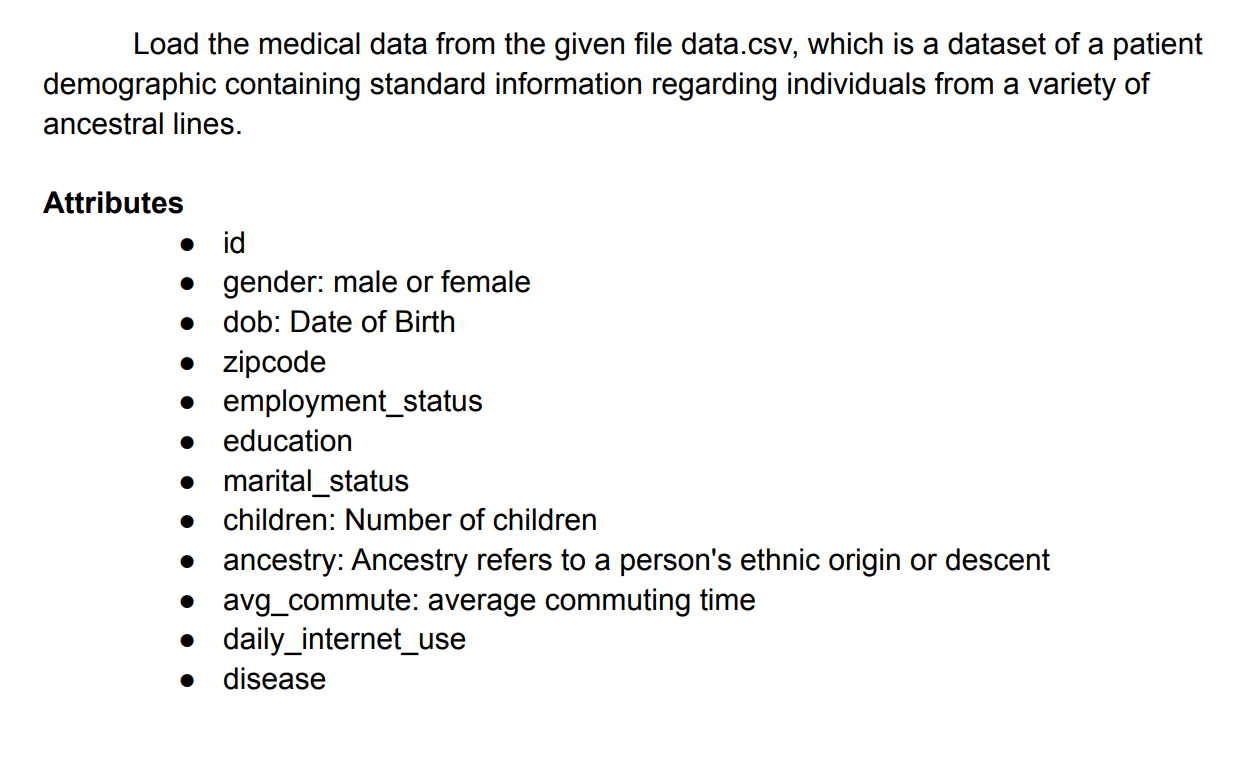
第17节 R语言分析:生物统计数据集 R 编码分析和绘图
生物统计数据集 R 编码分析和绘图 生物统计学,用于对给定文件 data.csv 中的医疗数据应用 R 编码,该文件是患者人口统计数据集,包含有关来自各种祖先谱系的个体的标准信息。 数据集特征解释 脚本 output= file("Output.txt") # File name of output log sink(o…...
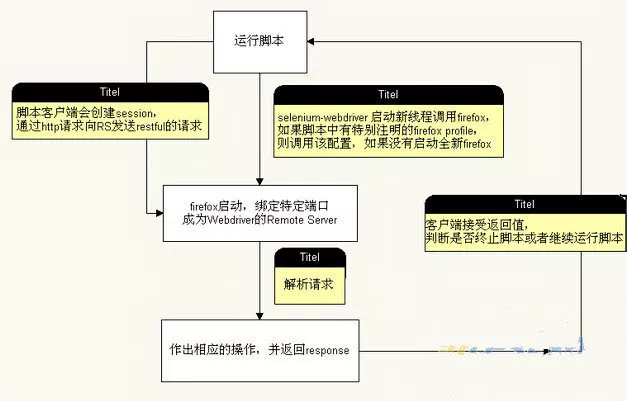
一文了解什么是Selenium自动化测试?
目录 一、Selenium是什么? 二、Selenium History 三、Selenium原理 四、Selenium工作过程总结: 五、remote server端的这些功能是如何实现的呢? 六、附: 一、Selenium是什么? 用官网的一句话来讲:Sel…...

java接口实现
文章目录 java接口实现接口中成员组成默认方法静态方法私有接口(保证自己的JDK版本大于等于9版本)类和接口的关系抽象类与接口之间的区别 java接口实现 1.接口关键字 interface2.接口不能实例化3.类与接口之间的关系是实现关系,通过 impleme…...
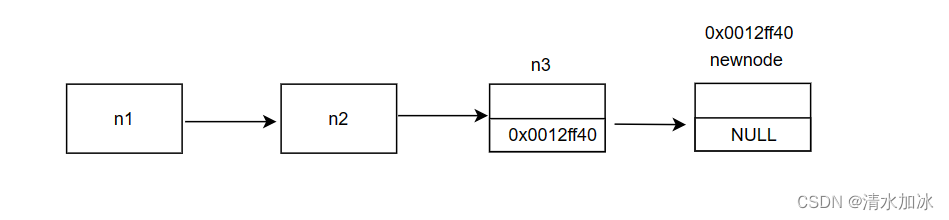
数据结构入门指南:链表(新手避坑指南)
目录 前言 1.链表 1.1链表的概念 1.2链表的分类 1.2.1单向或双向 1.2.2.带头或者不带头 1.2.33. 循环或者非循环 1.3链表的实现 定义链表 总结 前言 前边我们学习了顺序表,顺序表是数据结构中最简单的一种线性数据结构,今天我们来学习链表&#x…...

SpringBoot第24讲:SpringBoot集成MySQL - MyBatis XML方式
SpringBoot第24讲:SpringBoot集成MySQL - MyBatis XML方式 上文介绍了用JPA方式的集成MySQL数据库,JPA方式在中国以外地区开发而言基本是标配,在国内MyBatis及其延伸框架较为主流。本文是SpringBoot第24讲,主要介绍MyBatis技栈的演…...
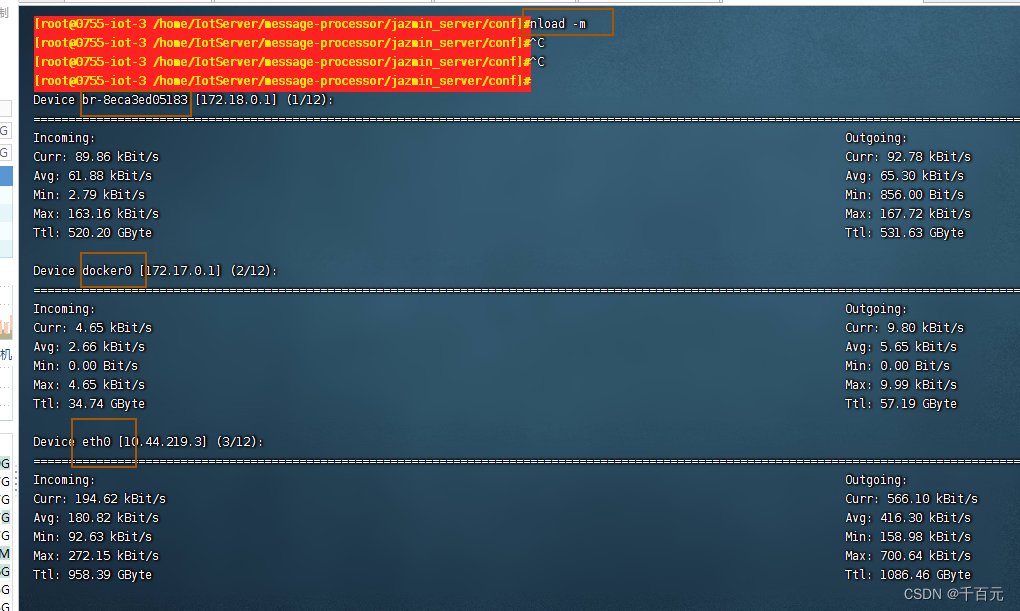
linux 查看网卡,网络情况
1,使用nload命令查看 #yum -y install nload 2, 查看eth0网卡网络情况 #nload eth0 Incoming也就是进入网卡的流量,Outgoing,也就是从这块网卡出去的流量,每一部分都有下面几个。 – Curr:当前流量 – Avg…...
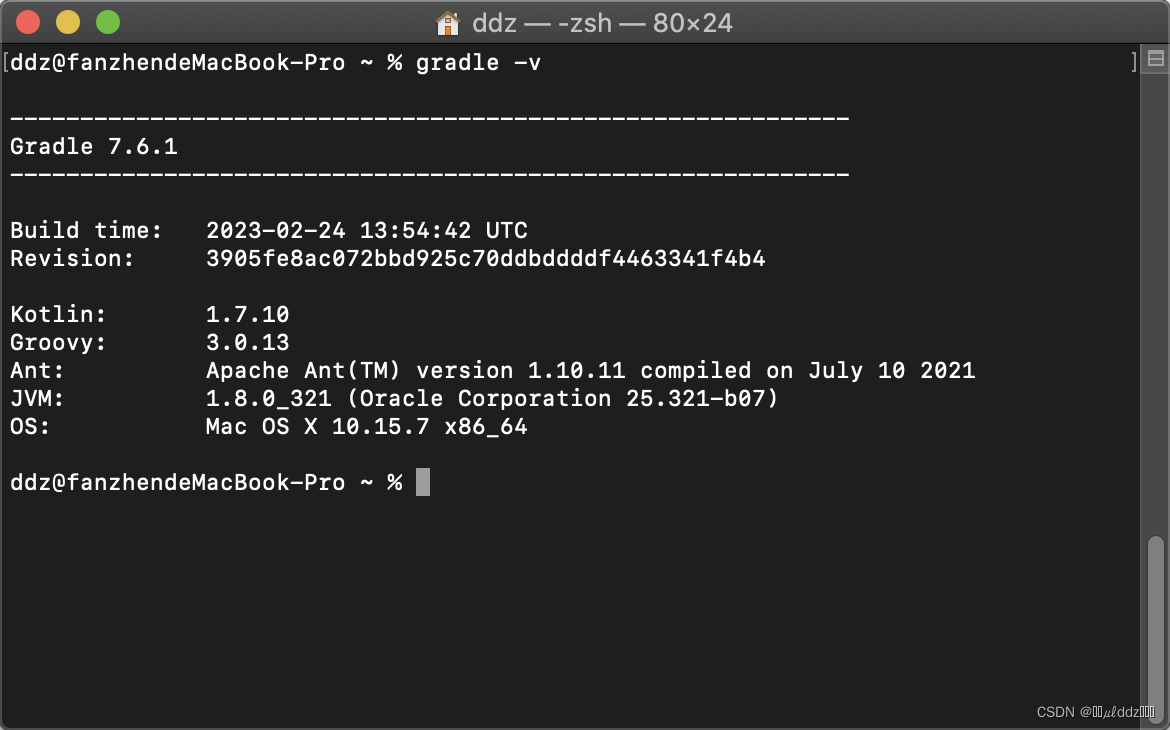
在Mac上搭建Gradle环境
在Mac上搭建Gradle环境: 步骤1:下载并安装Java开发工具包(JDK) Gradle运行需要Java开发工具包(JDK)。您可以从Oracle官网下载适合您的操作系统版本的JDK。请按照以下步骤进行操作: 打开浏览器…...
Docker网络与Docker Compose服务编排
docker网络 docker是以镜像一层一层构建的,而基础镜像是linux内核,因此docker之间也需要通讯,那么就需要有自己的网络。就像windows都有自己的内网地址一样,每个docker容器也是有自己的私有地址的。 docker inspect [docker_ID]…...

opencv+ffmpeg环境(ubuntu)搭建全面详解
一.先讲讲opencv和ffmpeg之间的关系 1.1它们之间的联系 我们知道opencv主要是用来做图像处理的,但也包含视频解码的功能,而在视频解码部分的功能opencv是使用了ffmpeg。所以它们都是可以处理图像和视频的编解码,我个人感觉两个的侧重点不一…...

开发基于 LoRaWAN 的设备须知--最大兼容性
最大兼容性配置简介 LoRaWAN开放协议的建立前提是每个制造的设备都可以被唯一且安全地识别。配置是创建唯一标识和相应秘密的过程。虽然配置过程是常规的,但存在一些可能并不明显的陷阱。本章尝试描述配置基于 LoRa 的设备的一些最佳实践。 配置概念 基于 LoRa 的设备配置与银…...

一、SpringBoot基础[日志]
一、日志 解释:SpringBoot使用logback作为默认的日志框架,其中还可以导入log4j2等优秀的日志框架 1.修改日志内容 修改整个日志格式:logging.pattern.console%d{yyyy-MM-dd HH:mm:ss} %-5level [%thread] %logger{15} 你好 %msg%n %d{yyy…...

libuv库学习笔记-networking
Networking 在 libuv 中,网络编程与直接使用 BSD socket 区别不大,有些地方还更简单,概念保持不变的同时,libuv 上所有接口都是非阻塞的。它还提供了很多工具函数,抽象了恼人、啰嗦的底层任务,如使用 BSD …...
C++多线程编程(第三章 案例1,使用互斥锁+ list模拟线程通信)
主线程和子线程进行list通信,要用到互斥锁,避免同时操作 1、封装线程基类XThread控制线程启动和停止; 2、模拟消息服务器线程,接收字符串消息,并模拟处理; 3、通过Unique_lock和mutex互斥方位list 消息队列…...
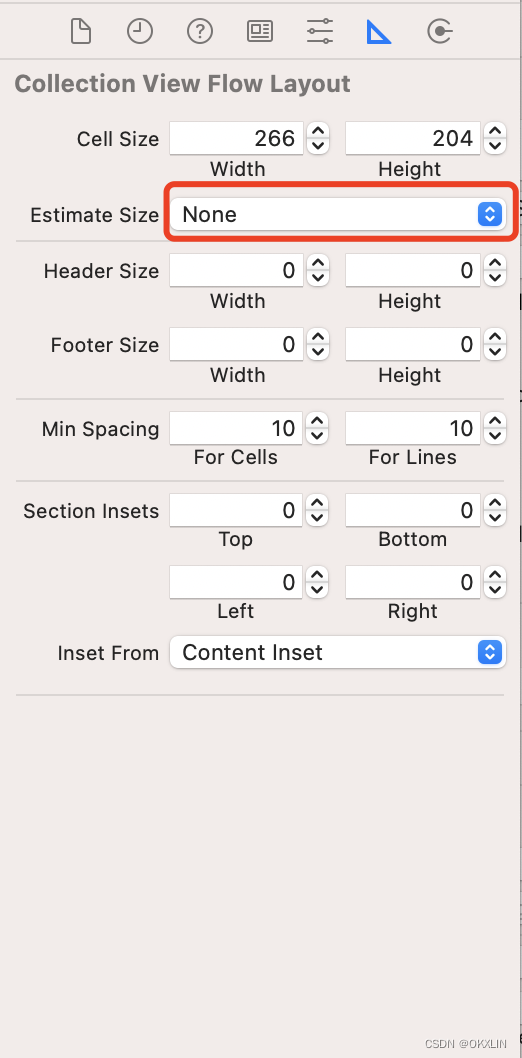
IOS UICollectionView 设置cell大小不生效问题
代码设置flowLayout.itemSize 单元格并没有改变布局大小, 解决办法如下图:把View flow layout 的estimate size 设置为None,上面设置的itemSize 生效了。...
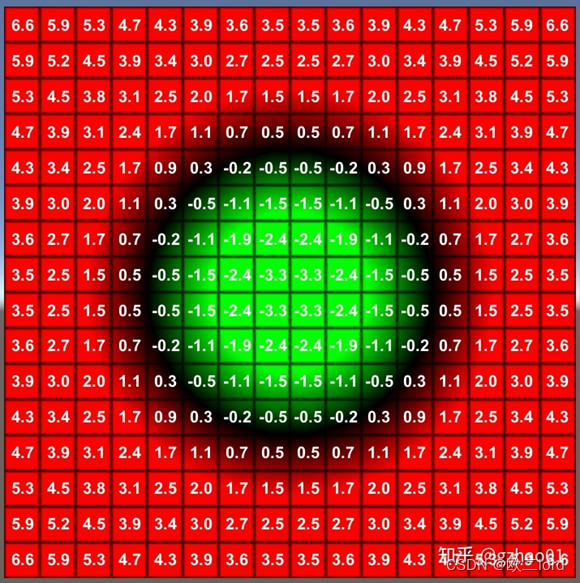
浅谈3D隐式表示(SDF,Occupancy field,NeRF)
本篇文章介绍了符号距离函数Signed Distance Funciton(SDF),占用场Occupancy Field,神经辐射场Neural Radiance Field(NeRF)的概念、联系与区别。 显式表示与隐式表示 三维空间的表示形式可以分为显式和隐式。 比较常用的显式表…...

面试官问LinkedBlockingQueue和ArrayBlockingQueue区别?别只答有界无界了,这3个实战坑才是重点
面试官追问LinkedBlockingQueue与ArrayBlockingQueue?别只答基础区别,这3个实战陷阱才是关键 当面试官抛出"LinkedBlockingQueue和ArrayBlockingQueue有什么区别"这个问题时,80%的候选人会条件反射般回答"一个有界一个无界&qu…...

Armv9-A架构解析:SVE/SME与安全增强技术
1. Armv9-A架构演进与核心特性全景Armv9-A架构代表了Arm公司面向未来十年计算需求的设计哲学,其核心在于三个维度的突破:性能、安全与专用计算。作为长期从事Arm架构开发的工程师,我见证了从Armv7到Armv9的技术跃迁。与固定宽度向量指令的NEO…...

抖音批量下载神器:5分钟学会免费无水印视频下载
抖音批量下载神器:5分钟学会免费无水印视频下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖…...

Apple Silicon Mac 电池管理的终极解决方案:Battery Toolkit 完整指南
Apple Silicon Mac 电池管理的终极解决方案:Battery Toolkit 完整指南 【免费下载链接】Battery-Toolkit Control the platform power state of your Apple Silicon Mac. 项目地址: https://gitcode.com/gh_mirrors/ba/Battery-Toolkit 在当今移动办公时代&a…...

【独家披露】DeepSeek灰度发布SLI/SLO基线标准:99.95%可用性背后的4层验证漏斗
更多请点击: https://codechina.net 第一章:DeepSeek灰度发布策略全景图 DeepSeek模型服务的灰度发布并非简单的流量切分,而是一套融合可观测性、渐进式验证与多维熔断机制的工程化闭环体系。其核心目标是在保障线上推理稳定性的同时&#x…...

告别窗口遮挡:Topit如何让macOS多任务效率提升3倍
告别窗口遮挡:Topit如何让macOS多任务效率提升3倍 【免费下载链接】Topit Pin any window to the top of your screen / 在Mac上将你的任何窗口强制置顶 项目地址: https://gitcode.com/gh_mirrors/to/Topit 你是否曾经因为窗口重叠而频繁切换应用࿱…...

2026苹果芯片级数据恢复:揭秘唯一原厂技术真相
在数字生活高度依赖移动设备的今天,数据安全已成为每位用户的核心关切。尤其是苹果生态用户,当遭遇设备无法开机、系统崩溃或物理损坏时,“苹果芯片级数据恢复”便成为最后的一线希望。然而,市面上众多宣称“原厂技术”的服务商&a…...
)
避坑指南:在Unity里用sherpa-onnx做离线TTS,我踩过的那些‘坑’(采样率、尾音、模型选择)
Unity集成sherpa-onnx离线TTS实战避坑指南第一次在Unity里听到自己合成的机械音时,那种兴奋感至今难忘——直到发现所有音频都像上世纪电话录音一样失真。原来sherpa-onnx默认生成的8000Hz采样率音频,在Unity的44100Hz标准环境下直接播放会产生严重的音质…...

LVGL事件处理实战:从按钮点击到复杂手势,手把手教你写响应式UI回调
LVGL事件处理实战:从按钮点击到复杂手势,手把手教你写响应式UI回调 在嵌入式系统开发中,用户界面的交互体验往往决定了产品的成败。LVGL作为轻量级通用图形库,其事件处理机制是构建动态交互的核心。不同于简单的回调函数绑定&…...

告别AssetBundle!用Unity Addressables实现资源热更,我踩过的坑都帮你填平了
从AssetBundle到Addressables:Unity资源热更的现代化迁移指南第一次接触Unity Addressables时,我正被AssetBundle的各种问题折磨得焦头烂额。那是一个周五的深夜,项目即将上线,却因为AssetBundle的依赖关系混乱导致热更新失败。在…...