FANUC机器人SRVO-050碰撞检测报警和SRVO-053干扰值过大故障报警总结
相关文章:

FANUC机器人SRVO-050碰撞检测报警和SRVO-053干扰值过大故障报警总结
FANUC机器人SRVO-050碰撞检测报警和SRVO-053干扰值过大故障报警总结 前面和大家分享了关于SRVO-050碰撞检测报警和SRVO-053干扰值过大的原因分析以及处理方法,感兴趣的朋友可以参考以下链接中的内容: FANUC机器人SRVO-050碰撞检测报警原因分析及处理对策...
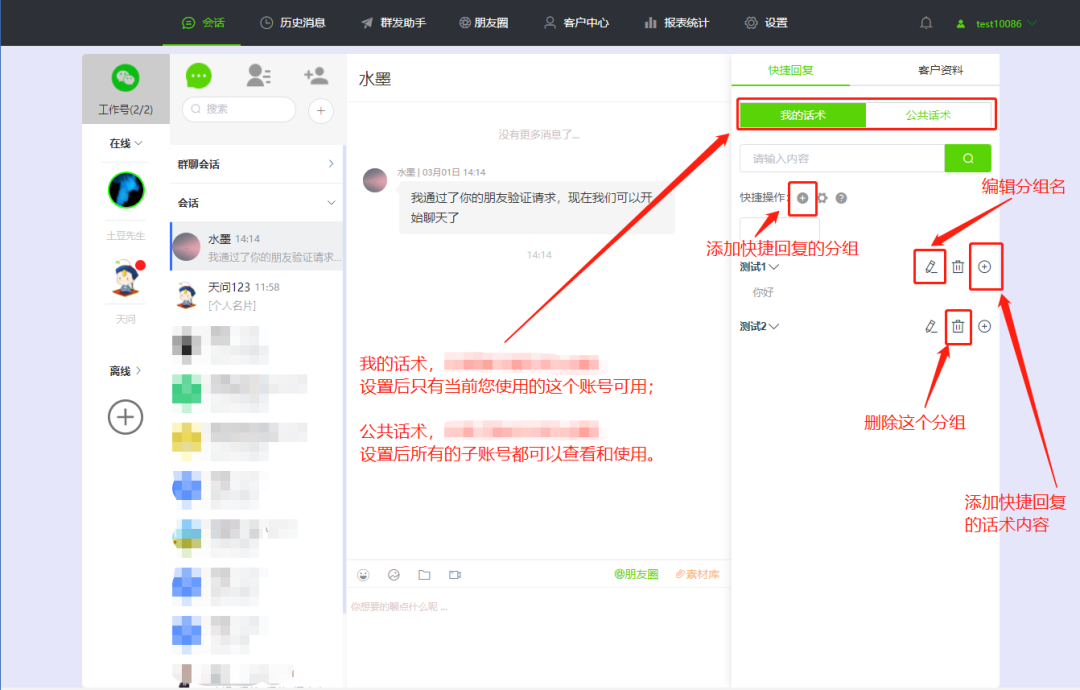
微信如何提高回复信息速度?
规范流程话术有什么用?为了提高回复客户的效率和质量,可以事先设计好的一套标准化的对话模板。它通常包括多个环节和问题,帮助客服人员或销售人员在与客户沟通时,按照标准化的流程进行,以提高工作效率和客户满意度。 如…...
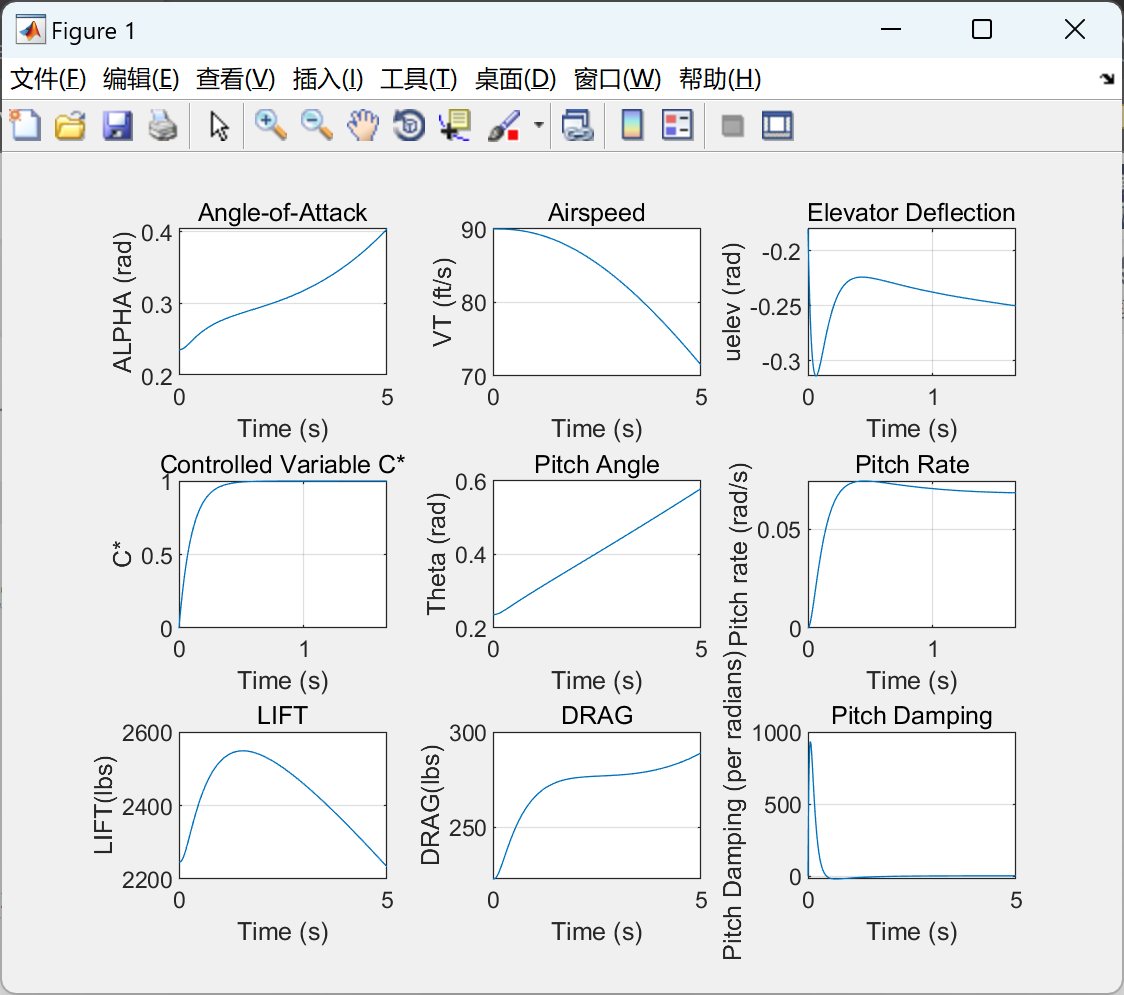
模拟Stevens Lewis描述的小型飞机纵向动力学的非线性动态反演控制器研究(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 🌈4 Matlab代码实现 💥1 概述 针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标…...
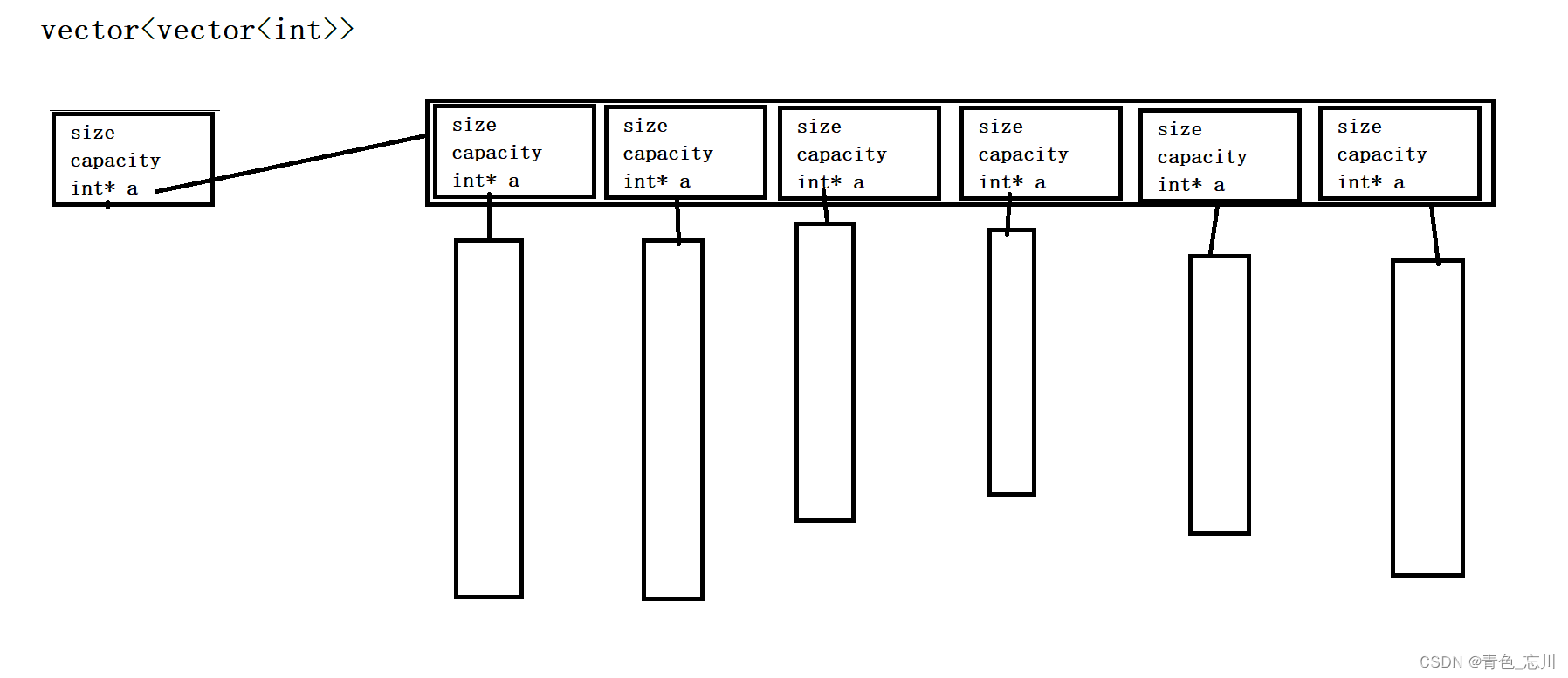
【C++从0到王者】第十二站:vector基本使用
文章目录 一、vector基本介绍二、vector的基本使用三、vector\<char> 和string的区别四、vector接口介绍1.vector的模板参数2.构造函数3.迭代器4.size和max_size5.resize和reserve6.operator[]和at7.front和back8.data9.push_back和pop_back10.insert和erase11.assign12.…...
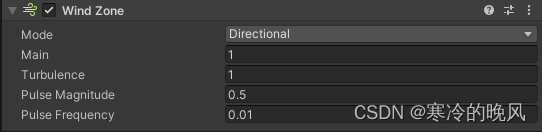
了解Unity编辑器之组件篇Miscellaneous(九)
一、Aim Constraint:是一种动画约束,用于使一个对象朝向另一个对象或一个指定的矢量方向 Activate按钮:用于激活或停用Aim Constraint。当Aim Constraint处于激活状态时,其约束效果将应用于目标对象。 Zero按钮:用于将…...

自动驾驶小车
开发自动驾驶小车涉及多个方面,包括硬件和软件。下面是一般情况下开发自动驾驶小车的主要步骤: 确定需求和功能:明确您的自动驾驶小车的目标和应用场景,确定需要的功能和特性,例如感知、决策、控制等。 硬件选择和安…...
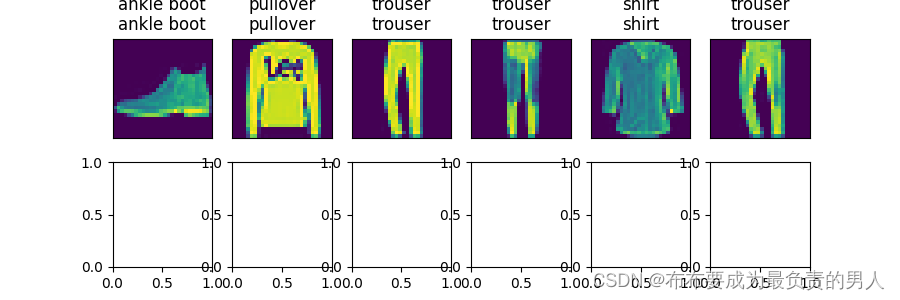
机器学习深度学习——多层感知机的从零开始实现
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——多层感知机 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 为…...

Redis的基本使用命令
Redis的使用命令 Redis是一个开源的使用ANSI C编写、遵守BSD协议、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。它通常被称为数据结构服务器,因为值(value)可以是 字符串(String), 哈希(Hash…...

Ts入门到放弃
TS 的核心能力在于给 JS 提供静态类型检查,是有类型定义的 JS 的超集,包括 ES5、ES5 和其他一些诸如泛型、类型定义、命名空间等特征的集合。 本次仅会针对类型声明部分配合示例进行着重介绍,更详细的内容以及特性可以查看 Typescript handb…...

黑客技术(网络安全)学习笔记
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Cloud Kernel SIG 月度动态:支持龙芯和申威架构,合入两个内存新特性
Cloud Kernel SIG(Special Interest Group):支撑龙蜥内核版本的研发、发布和服务,提供生产可用的高性价比内核产品。 01 SIG 整体进展 Cloud Kernel 开始支持龙芯和申威架构。 合入两个内存新特性:MEMCG LRU LOCK 和…...
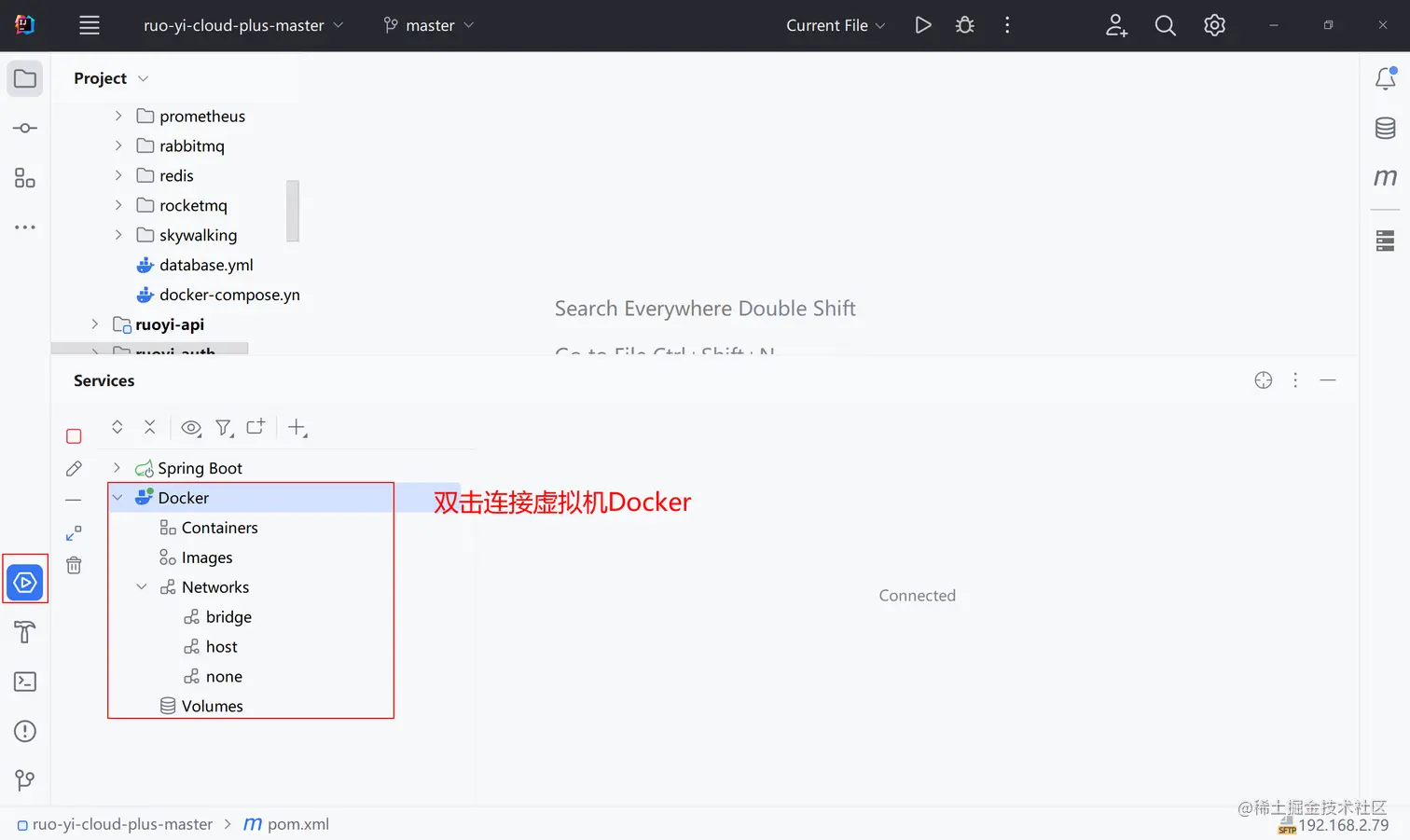
IDEA中连接虚拟机 管理Docker
IDEA中连接虚拟机 管理Docker 📔 千寻简笔记介绍 千寻简笔记已开源,Gitee与GitHub搜索chihiro-notes,包含笔记源文件.md,以及PDF版本方便阅读,且是用了精美主题,阅读体验更佳,如果文章对你有帮…...
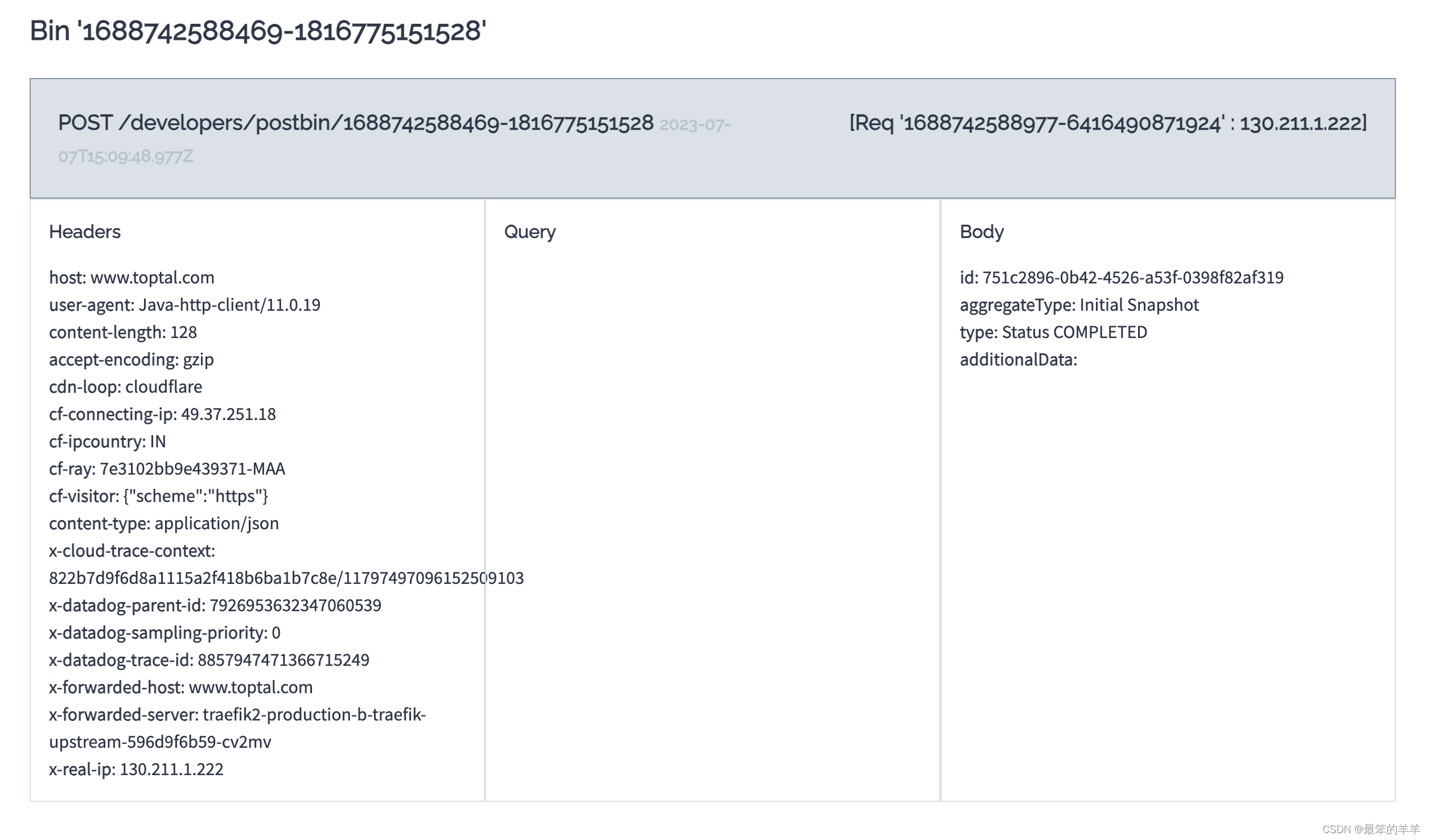
Debezium日常分享系列之:定制Debezium 信号发送和通知
Debezium日常分享系列之:定制Debezium 信号发送和通知 一、自定义信号和通知通道二、结论 Debezium 2.3 在信号和通知功能方面引入了新的改进。除了 Debezium 提供的预定义信号和通知通道之外,您还可以设置新的信号和通知通道。此功能使用户能够自定义系…...
实现思路)
RpcProvider(rpc服务提供者)实现思路
RpcProvider(服务提供者)实现思路 上一节说到,如何将一个本地服务发布成远程服务,但没有说明一个rpc框架怎么进行调用的,看看上节代码 #include <iostream> #include <string> #include "user.pb.h…...
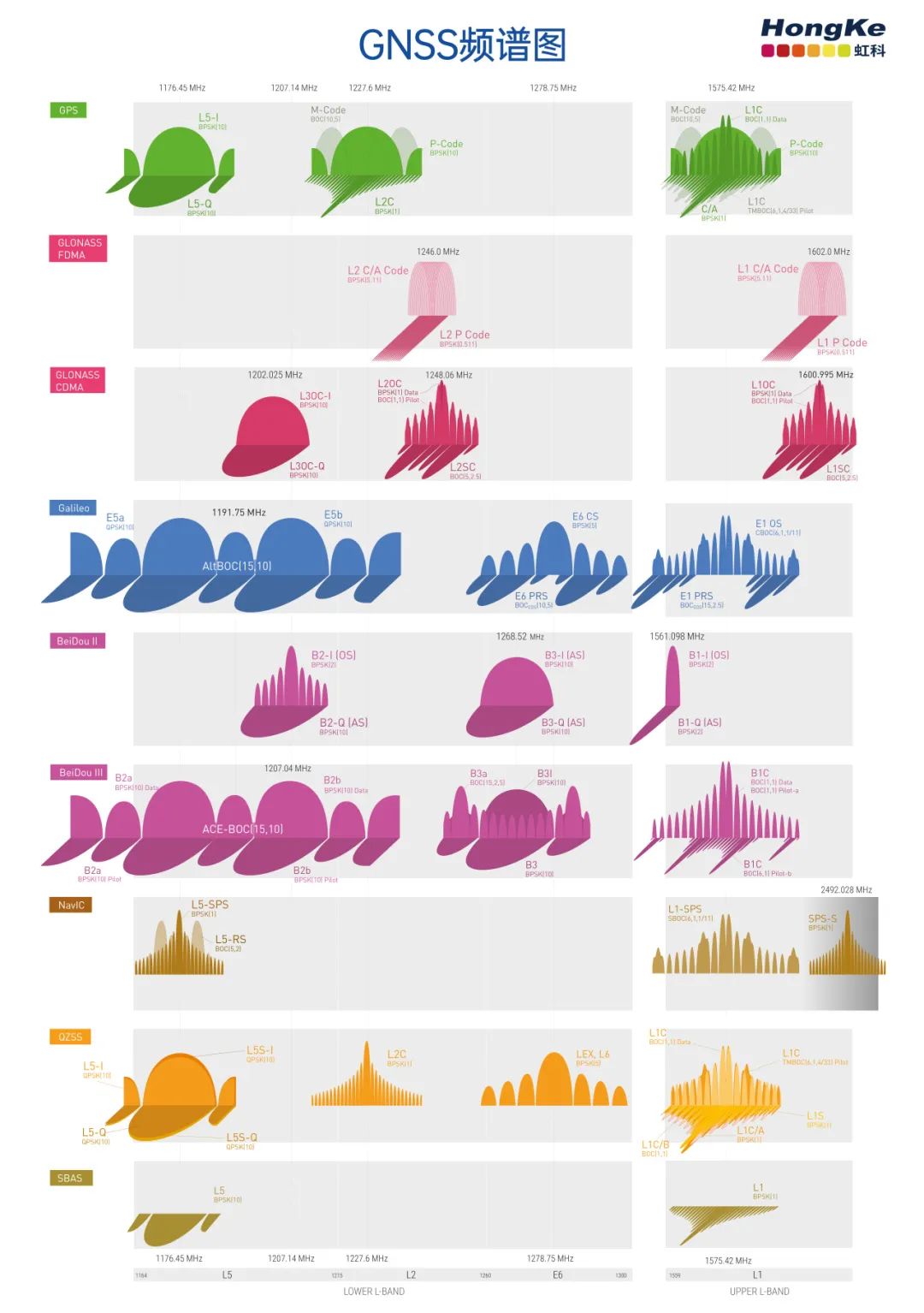
GNSS技术知识你知道多少?这些你或许还未掌握
GNSS信号频段 GNSS频谱图展示了不同的GNSS信号及其星座、载波频率、调制方案,以及所有这些信号在同一L波段频段内如何相互关联,是GNSS专业人员的必备工具,包括设计和开发GNSS系统的工程师,以及测试GNSS系统的工程师。 GNSS术语 …...
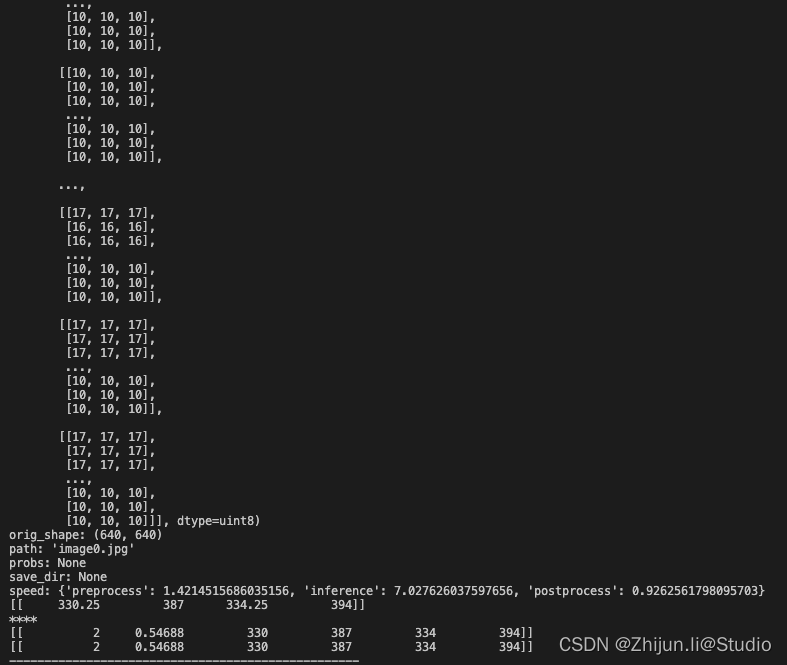
YOLOv8教程系列:三、使用YOLOv8模型进行自定义数据集半自动标注
YOLOv8半自动标注 目标检测半自动标注的优点包括: 1.提高标注效率:算法能够自动标注部分数据,减少了人工标注的工作量,节省时间和资源。 2.降低成本:自动标注可以减少人工标注的成本,特别是对于大规模数据…...

AI聊天GPT三步上篮!
1、是什么? CHATGPT是OpenAI开发的基于GPT(Generative Pre-trained Transformer)架构的聊天型人工智能模型。也就是你问它答,根据网络抓去训练 2、怎么用? 清晰表达自己诉求,因为它就是一个AI助手&#…...

如何彻底卸载VMware
目录 第一章、停止并卸载VMware程序1.1)停止VMware有关的服务1.2)打开任务管理器停止进程1.3)卸载VMware程序 第二章、残留文件删除2.1)打开注册表2.2)删除注册表残留文件2.3)C盘文件删除 友情提醒…...
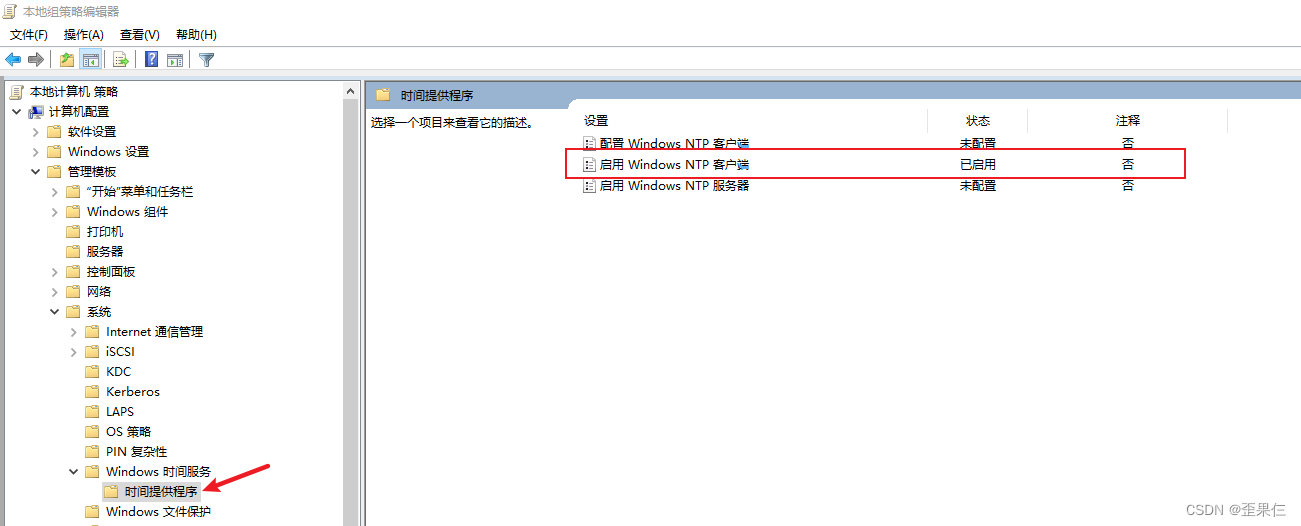
[个人笔记] Windows配置NTP时间同步
Windows - 运维篇 第六章 Windows配置NTP时间同步 Windows - 运维篇系列文章回顾Windows配置NTP时间同步域控环境的NTP配置工作组环境的NTP配置Windows的CMD部分命令集 参考来源 系列文章回顾 第一章 迁移WinSrv系统到虚拟机 第二章 本地安全策略xcopy实现实时备份文件夹内容 …...

Jetson Docker 编译 FFmpeg 支持硬解nvmpi和cuvid
0 设备和docker信息 设备为NVIDIA Jetson Xavier NX,jetpack版本为 5.1.1 [L4T 35.3.1] 使用的docker镜像为nvcr.io/nvidia/l4t-ml:r35.2.1-py3,详见https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-ml 使用下列命令拉取镜像: sudo docker pull nvcr…...

leetcode思路-236 二叉树的最近公共祖先
给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的…...

物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构
物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构在空间智能加速重构物理世界的当下,全域感知技术正经历一场从“物理标签”到“视觉原生”的底层范式革命。长期以来,以UWB(超宽带)为代表…...

建筑数据驱动预测控制方法应用【附模型】
✨ 长期致力于建筑热动态、阻容模型、数据驱动预测控制、控制器实施、人工智能研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)简化阻容模型结构与贝叶…...

知识竞赛大屏计分方案:让比分一目了然
📺 知识竞赛大屏计分方案:让比分一目了然实时准确 视觉直观 操作简便 打造专业竞赛体验🎯 一、方案核心架构大屏计分方案通常由三部分组成:🖥️ 主控端:操作员电脑,运行计分软件📺…...

巨亏47亿,市值5000亿:拆解智谱AI的定价逻辑
2026年1月8日,智谱以每股116.2港元登陆港交所。截至5月中旬,其股价一度冲上1160港元,市值突破5000亿港元,较发行价累涨近10倍。而同期披露的2025年财报显示,公司全年营收7.24亿元,经调整净亏损31.82亿元。来…...

AudioSwitch:一键管理Windows音频设备,告别繁琐系统设置
AudioSwitch:一键管理Windows音频设备,告别繁琐系统设置 【免费下载链接】AudioSwitch Switch between default audio input or output change volume 项目地址: https://gitcode.com/gh_mirrors/au/AudioSwitch 音频设备切换是Windows用户经常遇…...

从一道NOI题目看凯撒密码的实战:手把手教你用C++解密‘加密的病历单’
从凯撒密码到现代数据混淆:C实战解密技术全解析 在计算机科学和密码学的历史长河中,凯撒密码以其简洁优雅的设计理念,成为入门者理解加密原理的最佳起点。这道看似简单的"加密的病历单"编程题目,实际上是一次绝佳的密码…...

全球化2.0 | ZStack亮相印尼云计算与数据中心大会 以新一代云底座助力数字印尼建设
近日,由 W.Media 主办的印尼云计算和数据中心大会(Indonesia Cloud & Data Center Convention 2026)在雅加达举行。云轴科技 ZStack受邀参会,与来自印尼及国际数据中心行业的专业人士共同探讨企业云底座的最新进展与未来趋势。…...

影刀RPA跨境店群运营架构:TikTok Shop多节点高并发调度与Python环境隔离实战
大家好,我是林焱。 太有意思了,刚刷朋友圈,看到一个在跨境圈子里被疯狂转发的消息。 有几个当年和我一样,在南充念工程测量技术出身的 00 后学弟,最近跑回母校干了件特别硬核的事。 他们没有像传统的成功校友那样&a…...

如何为你的Python数据分析脚本注入多模型AI能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何为你的Python数据分析脚本注入多模型AI能力 对于数据分析师和科研工作者而言,Python脚本是处理数据、生成报告的核…...