回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测
回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测
目录
- 回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测
- 预测效果
- 基本介绍
- 程序设计
- 参考资料
预测效果





基本介绍
Matlab基于PSO-GPR基于粒子群算法优化高斯过程回归的数据回归预测(完整源码和数据)
1.Matlab实现PSO-GPR基于粒子群算法优化高斯过程回归的多输入单输出回归预测(完整源码和数据)
2.输入多个特征,输出单个变量,多输入单输出回归预测;
3.多指标评价,评价指标包括:R2、MAE、MSE、RMSE等,代码质量极高;
4.粒子群算法优化参数为:优化核函数超参数 sigma,标准差,初始噪声标准差;
5.excel数据,方便替换,运行环境2018及以上。
程序设计
- 完整程序和数据获取方式1,订阅《TSFM统计预测模型》(数据订阅后私信我获取):MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测,专栏外只能获取该程序。
- 完整程序和数据获取方式2,(资源处下载):MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
% restoredefaultpath
%% 导入数据
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
f_ =size(P_train, 1); %输入特征维度
M = size(P_train, 2);
N = size(P_test, 2);
%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 转置以适应模型
p_train = p_train'; p_test = p_test';
t_train = t_train'; t_test = t_test';
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 超参数设置
Best_pos = [0.6, 0.7, 30]; % 优化下界%% 仿真测试
t_sim1 = predict(net, p_train);
t_sim2 = predict(net, p_test );
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 数据反归一化
T_sim1 = mapminmax('reverse', t_sim1, ps_output);
T_sim2 = mapminmax('reverse', t_sim2, ps_output);
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 数据转置
T_sim1=T_sim1';
T_sim2 =T_sim2';
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 均方根误差
error1 = sqrt(sum((T_sim1 - T_train).^2) ./ M);
error2 = sqrt(sum((T_sim2 - T_test ).^2) ./ N);%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%%
%决定系数
R1 = 1 - norm(T_train - T_sim1)^2 / norm(T_train - mean(T_train))^2;
R2 = 1 - norm(T_test - T_sim2)^2 / norm(T_test - mean(T_test ))^2;
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%%
%均方误差 MSE
mse1 = sum((T_sim1 - T_train).^2)./M;
mse2 = sum((T_sim2 - T_test).^2)./N;
%%
%RPD 剩余预测残差
SE1=std(T_sim1-T_train);
RPD1=std(T_train)/SE1;
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
SE=std(T_sim2-T_test);
RPD2=std(T_test)/SE;
%% 平均绝对误差MAE
MAE1 = mean(abs(T_train - T_sim1));
MAE2 = mean(abs(T_test - T_sim2));
%% 平均绝对百分比误差MAPE
MAPE1 = mean(abs((T_train - T_sim1)./T_train));
MAPE2 = mean(abs((T_test - T_sim2)./T_test));
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 测试集误差图
figure
ERROR3=T_test-T_sim2;
plot(T_test-T_sim2,'b-*','LineWidth',1.5)
xlabel('测试集样本编号')
ylabel('预测误差')
title('测试集预测误差')
grid on;
legend('GPR预测输出误差')
%% 打印出评价指标
disp(['-----------------------误差计算--------------------------'])
disp(['评价结果如下所示:'])
disp(['平均绝对误差MAE为:',num2str(MAE2)])
disp(['均方误差MSE为: ',num2str(mse2)])
disp(['均方根误差RMSEP为: ',num2str(error2)])
disp(['决定系数R^2为: ',num2str(R2)])
disp(['剩余预测残差RPD为: ',num2str(RPD2)])
disp(['平均绝对百分比误差MAPE为: ',num2str(MAPE2)])
参考资料
[1]https://blog.csdn.net/kjm13182345320/article/details/124443069?spm=1001.2014.3001.5501
[2]https://blog.csdn.net/kjm13182345320/article/details/124443735?spm=1001.2014.3001.5501
相关文章:
回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测
回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测 目录 回归预测 | MATLAB实现PSO-GPR粒子群优化高斯过程回归多输入单输出回归预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 Matlab基于PSO-GPR基于粒子群算法优化高斯过程回归的数据回归预…...

python_PyQt5开发验证K线视觉想法工具V1.1 _增加标记类型_线段
目录 运行情况: 代码: 承接 【python_PyQt5开发验证K线视觉想法工具V1.0】 博文 https://blog.csdn.net/m0_37967652/article/details/131966298 运行情况: 添加线段数据在K线图中用线段绘制出来 代码: 1 线段标记的数据格式…...
中文多模态医学大模型智能分析X光片,实现影像诊断,完成医生问诊多轮对话
项目设计集合(人工智能方向):助力新人快速实战掌握技能、自主完成项目设计升级,提升自身的硬实力(不仅限NLP、知识图谱、计算机视觉等领域):汇总有意义的项目设计集合,助力新人快速实…...

企业服务器数据库被360后缀勒索病毒攻击后采取的措施
近期,360后缀勒索病毒的攻击事件频发,造成很多企业的服务器数据库遭受严重损失。360后缀勒索病毒是Beijingcrypt勒索家族中的一种病毒,该病毒的加密形式较为复杂,目前网络上没有解密工具,只有通过专业的技术人员对其进…...

FFmpeg-两个文件mix重采样以那个为主
ffmpeg -i 2ch-44.1k.wav -i 2ch-16k.wav -filter_complex " \ [0:a][1:a]amixinputs2[aout]" \ -map [aout] -f null -ffmpeg -i 2ch-44.1k.wav -i 2ch-16k.wav -filter_complex " \ [0:a][1:a]amixinputs2[aout]" \ -map [aout] -f null -对比发现&#…...
【WebGL】初探WebGL,我了解到这些
WebGL(Web图形库)是一种强大的技术,允许您在Web浏览器中直接创建交互式的3D图形和动画。它利用现代图形硬件的能力来呈现令人惊叹的视觉效果,使其成为Web开发人员和计算机图形爱好者必备的技能。 WebGL基础知识 WebGL基于OpenGL …...

fwft fifo和standard fifo
fifo共有两种,分别是standard fifo和fwft fifo,其中,前者的latency=1,即rd_en信号有效且fifo非空时,数据会在下一个周期出现在fifo的读数据端口。而后者,即fwft fifo的latency=0,也就是说,rd_en信号有效的当拍,数据就会出现在读端口上。这里,fwft是First-word-Fall-T…...
pdf阅读器哪个好用?这个阅读器别错过
pdf阅读器哪个好用?PDF是一种流行的文件格式,可以保留文档的原始格式、布局和字体。与其他文档格式相比,PDF在不同设备和操作系统上的显示效果更为一致,确保文档内容的准确性和可读性。在阅读一些PDF文件的时候,使用一…...

【LeetCode】下降路径最小和
下降路径最小和 题目描述算法分析编程代码 链接: 下降路径最小和 题目描述 算法分析 编程代码 class Solution { public:int minFallingPathSum(vector<vector<int>>& matrix) {int n matrix.size();vector<vector<int>> dp(n1,vector(n2,INT_M…...
从0到1开发go-tcp框架【2-实现Message模块、解决TCP粘包问题、实现多路由机制】
从0到1开发go-tcp框架【2-实现Message模块、解决TCP粘包问题、实现多路由机制】 1 实现\封装Message模块 zinx/ziface/imessage.go package zifacetype IMessage interface {GetMsdId() uint32GetMsgLen() uint32GetMsgData() []byteSetMsgId(uint32)SetData([]byte)SetData…...

Boost开发指南-3.6weak_ptr
weak_ptr weak_ptr是为配合shared_ptr而引入的一种智能指针,它更像是shared_ptr的一个助手而不是智能指针,因为它不具有普通指针的行为,没有重载 operator*和->。它的最大作用在于协助shared_ptr工作,像旁观者那样观测资源的使…...

Swift 周报 第三十三期
文章目录 前言新闻和社区App 内购买项目和订阅即将实行价格与税率调整为家庭提供安全的 App 体验 提案正在审查的提案 Swift论坛推荐博文话题讨论关于我们 前言 本期是 Swift 编辑组自主整理周报的第二十四期,每个模块已初步成型。各位读者如果有好的提议ÿ…...
)
网络空间安全及计算机领域常见英语单词及短语——网络安全(一)
目录 网络空间安全常见英语单词没事儿读着玩儿相关知识扫盲 CSDN的小伙伴们,我快回来咯!网络空间安全常见英语单词 Cybersecurity 网络安全Network security 网络安全Information security 信息安全Data protection 数据保护Threat analysis 威胁分析Ri…...

Go基准测试Benchmark
Go语言自带了一个强大的测试框架,其中包括基准测试(Benchmark)功能,基准测试用于测量和评估一段代码的性能。 我们可以通过在Go的测试文件中编写特殊格式的函数来创建基准测试。测试文件的命名遵守原函数名称_test.go 的格式。 基…...
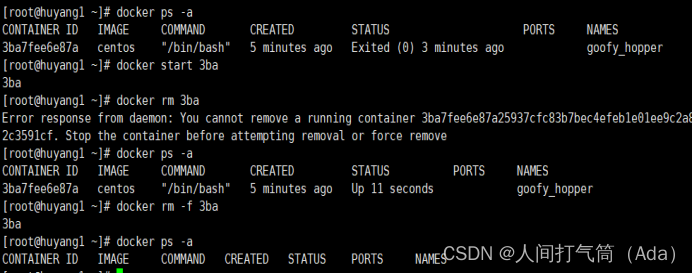
docker容器的基本操作
一、查看Docker的版本信息 [roothuyang1 ~]# docker version 二、查看docker的详细信息 [roothuyang1 ~]# docker info 三、Docker镜像操作 Docker创建容器前需要本地存在对应的镜像,如果本地加载不到相关镜像,Docker默认就会尝试从镜像仓库https://hu…...

MySQL绿色安装和配置
1、 从地址http://dev.mysql.com/downloads/mysql/中选择windows的版本下载。 2、 mysql各个版本的简介 (1) MySQL Community Server 社区版本,开源免费,但不提供官方技术支持。 (2) MySQL Enterprise Ed…...
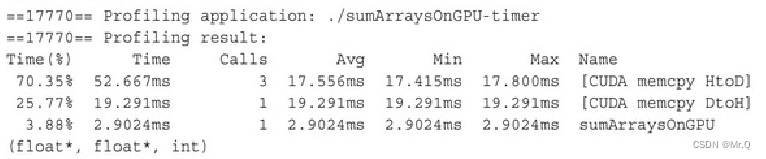
《cuda c编程权威指南》03 - cuda小功能汇总
1. 计时 1.1 linux #include <sys/time.h>double cpuSecond() {struct timeval tp;gettimeofday(&tp, NULL);return ((double)tp.tv_sec (double)tp.tv_usec*1e-6); }// 调用 double start cpuSecond(); kernel_name << <grid, block >> > (ar…...

Java:Java程序通过执行系统命令调用Python脚本
本文实现功能:Java程序调用Python脚本 Python脚本 import sysdef add(x, y):return x yif __name__ "__main__":print(add(int(sys.argv[1]), int(sys.argv[2])))直接执行 $ python math.py 1 2 3Java程序调用Python脚本 package io.github.mouday.…...
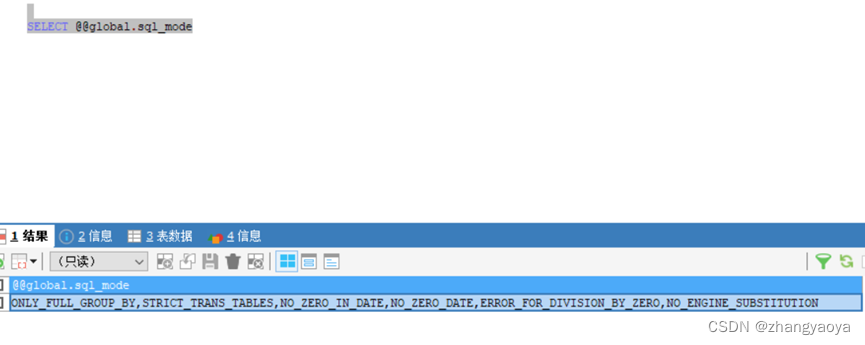
this is incompatible with sql_mode=only_full_group_by
查看配置 select global.sql_mode 在sql命令行中输入select sql_mode 能够看到sql_mode配置,如果有ONLY_FULL_GROUP_BY,则需要修改 在mysql5.7.5后,ONLY_FULL_GROUP_BY是默认选项,所以就会导致group by的问题 set sql_mode‘复制去掉ONLY_F…...

GCC编译选项
当使用GCC编译器时,可以根据不同的需求选择适当的编译选项来控制编译过程和生成的代码的行为。以下是一些常见的GCC编译选项的归纳: 优化选项: -O0: 不进行优化,保留原始的C代码结构。-O1: 启用基本优化级别,进行简单…...

突破存储限制:群晖DSM7下Synology Photos自定义文件夹挂载实战
1. 为什么需要自定义文件夹挂载 很多群晖用户升级到DSM7后都会遇到一个头疼的问题:Synology Photos默认把所有个人照片都存放在/home/Photos目录下,而这个目录实际上位于/homes共享文件夹中。随着照片数量不断增加,/homes所在存储空间很快就会…...

从myplaces.shp到专题地图:手把手教你用QGIS C++ API实现点要素分级渲染
从myplaces.shp到专题地图:QGIS C API实现点要素分级渲染实战指南 当我们需要在桌面GIS应用中直观展示气象站降雨量、城市人口密度或商业网点销售额等连续型空间数据时,分级色彩渲染是最有效的可视化手段之一。本文将深入探讨如何利用QGIS强大的C API&am…...

避坑指南:Unity热重载插件内存占用高?可能是Windows Defender在搞鬼
Unity热重载性能优化:解决Windows Defender导致的资源占用问题 当你在Unity开发过程中频繁修改C#代码时,热重载(Hot Reload)功能无疑是提升效率的利器。它能让你在游戏运行状态下即时看到代码修改效果,避免反复重启带来的时间浪费。然而&…...

DLSS Swapper终极指南:免费开源的游戏DLSS智能管理工具
DLSS Swapper终极指南:免费开源的游戏DLSS智能管理工具 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper DLSS Swapper是一款革命性的免费开源工具,专为PC游戏玩家设计,能够智能管理、…...

基于LLM与视觉模型融合的智能体框架:从原理到工业质检实践
1. 项目概述:当AI学会“看”与“想”最近在探索AI与视觉结合的落地场景时,我深度体验了landing-ai/vision-agent这个项目。它不是一个简单的图像识别工具,而是一个试图让AI具备“视觉推理”能力的智能体框架。简单来说,它让AI不仅…...

Vibe Coding Playbook:从环境到心流,打造高效愉悦的编程系统
1. 项目概述:一个关于“氛围感编程”的实践指南最近在GitHub上看到一个挺有意思的项目,叫“Vibe Coding Playbook”。乍一看这个标题,可能会有点摸不着头脑——“Vibe Coding”是什么?是某种新的编程范式吗?还是某种神…...

智能体开发实战:从框架选型到部署优化的完整指南
1. 项目概述:一个为智能体开发者准备的“军火库”如果你正在或打算踏入智能体(Agent)开发这个领域,那么你很可能已经体会过那种“万事开头难”的迷茫。从选择哪个框架开始,到如何设计一个有效的智能体工作流࿰…...

如何选蜂蜜品牌?2026年5月推荐靠谱蜂蜜品牌避坑指南
一、引言买蜂蜜怕踩坑?市面上的蜂蜜产品琳琅满目,但勾兑蜜、浓缩蜜、添加糖浆的“科技蜜”层出不穷,消费者往往花了高价却买不到真正的纯正好蜜。对于注重健康饮食、追求天然原生态食品的消费者而言,如何从海量品牌中筛选出真正无…...

如何在Windows上无缝安装安卓应用:APK安装器终极指南
如何在Windows上无缝安装安卓应用:APK安装器终极指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾在电脑上羡慕安卓应用的便利,却苦…...

AI编码工具选型指南:从原理到实践的全方位解析
1. 项目概述:为什么我们需要一份AI编码工具的“藏宝图”如果你是一名开发者,过去一年里,你的工作流可能已经被AI工具彻底重塑了。从最初用ChatGPT写几行注释,到后来用GitHub Copilot自动补全整段代码,再到如今各种能直…...