【论文笔记】RCM-Fusion: Radar-Camera Multi-Level Fusion for 3D Object Detection
原文链接:https://arxiv.org/abs/2307.10249
1. 引言
目前的一些雷达-相机融合3D目标检测方法进行实例级的融合,从相机图像生成3D提案,并与雷达点云相关联以修正提案。但这种方法没有在最初阶段使用雷达,依赖于相机3D检测器;且融合发生在图像视图,多模态数据关联可能因为雷达点云的高度模糊性而不精确。
本文提出雷达-相机多级融合(RCM-Fusion)方法,在BEV融合特征。首先会进行特征级融合,使用雷达数据指导图像特征变换到BEV下,并生成3D边界框。然后使用基于网格点的提案特征融合,进行实例级融合以修正提案,
对于特征级融合,本文设计了雷达指导的BEV查询,使用雷达的位置信息将图像特征转换到BEV。然后雷达-相机门控模块加权聚合多模态BEV特征。这种自适应特征聚合模块被整合到Transformer中,解码密集的BEV查询特征。对于实例级融合,提出提案感知的雷达注意力模块,考虑雷达点与3D提案的相关性,获取雷达点特征。
2. 相关工作
2.3. 两阶段3D目标检测
基于激光雷达的两阶段3D目标检测器利用提案框内的激光雷达点云来修正提案。可分两种方法:第一种方法将与提案相关的一些点视为关键点,使用PointNet++基于关键点提取特征。第二种方法定义一组虚拟点,称为网格点,并基于网格点提取特征。本文认为考虑提案内的点云分布是两阶段检测器的关键部分,使用网格点方法根据点云分布生成关键点。
3. 方法
网络结构如下图所示。
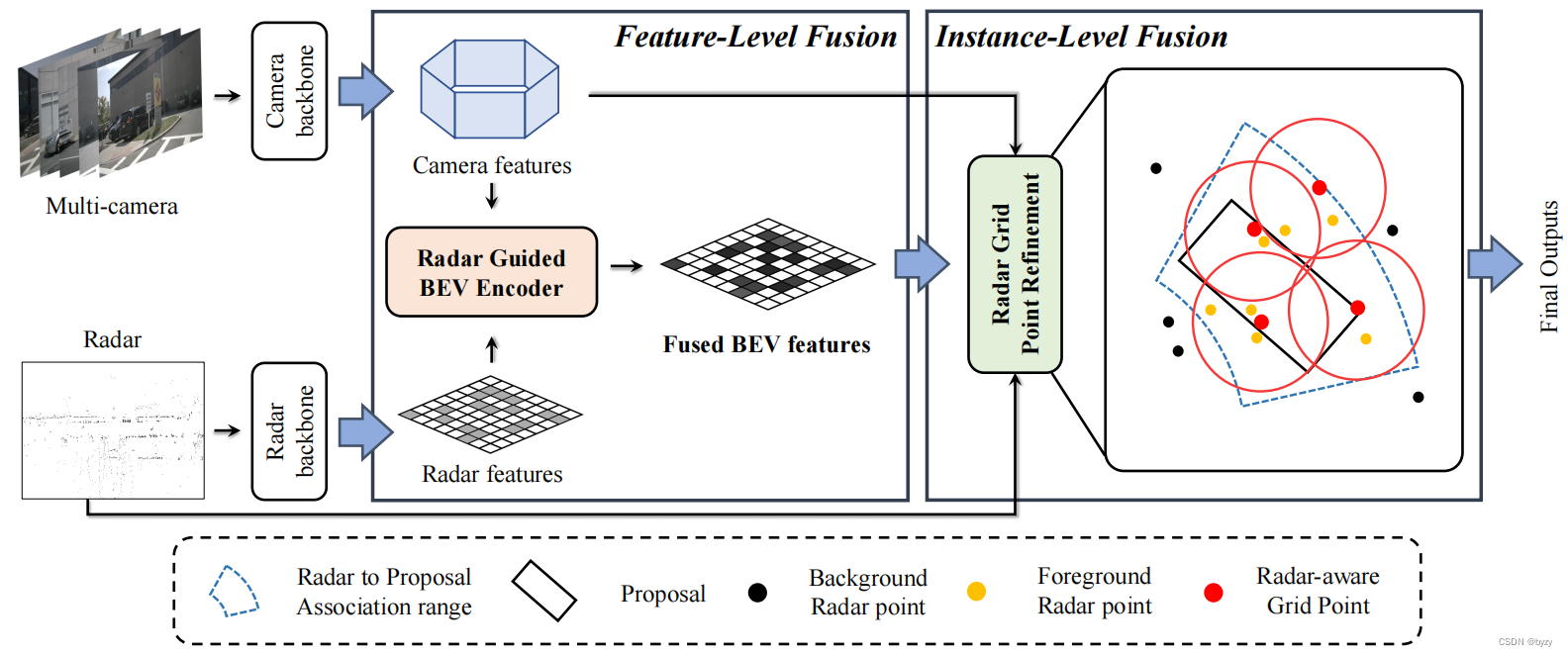
3.1. 雷达和图像主干
使用ResNet-101和FPN提取多尺度图像特征 F C F_C FC;使用PointPillars提取雷达BEV特征图 F R ∈ R H × W × C F_R\in\mathbb{R}^{H\times W\times C} FR∈RH×W×C。
3.2. 雷达指导的BEV编码器
首先使用 F R F_R FR生成雷达指导的BEV查询(RGBQ),该查询包含雷达的位置信息。然后,使用RGBQ将多模态特征转换为增强BEV特征。最后,雷达-相机门控(RCG)根据各模态的信息量,进行多模态的门控聚合。
雷达指导的BEV查询:本文利用雷达的位置信息,使用 F R F_R FR生成BEV查询(RGBQ) Q R G ∈ R H × W × C Q^{RG}\in\mathbb{R}^{H\times W\times C} QRG∈RH×W×C。具体来说,将 F R F_R FR与BEV查询 Q ∈ R H × W × C Q\in\mathbb{R}^{H\times W\times C} Q∈RH×W×C拼接后通过可变形注意力(DeformAttn)模块生成 Q R G Q^{RG} QRG: Q p R G = ∑ V ∈ { Q , F R } DeformAttn ( Q p , p , V ) Q_p^{RG}=\sum_{V\in\{Q,F_R\}}\text{DeformAttn}(Q_p,p,V) QpRG=V∈{Q,FR}∑DeformAttn(Qp,p,V)其中 Q p R G Q_p^{RG} QpRG和 Q p Q_p Qp分别表示BEV像素 p = ( x , y ) p=(x,y) p=(x,y)处的查询。然后 Q p R G Q_p^{RG} QpRG通过空间交叉注意力(SCA)块生成修正的相机BEV特征 B C B_C BC和修正的雷达BEV特征 B R B_R BR: B C = SCA C ( Q p R G , F C ) B R = SCA R ( Q p R G , F R ) B_C=\text{SCA}_C(Q_p^{RG},F_C)\\B_R=\text{SCA}_R(Q_p^{RG},F_R) BC=SCAC(QpRG,FC)BR=SCAR(QpRG,FR)其中SCA是将 Q p R G Q_p^{RG} QpRG投影到模态特征然后进行可变形交叉注意力的操作。
雷达-相机门控:通过加权组合融合 B C B_C BC与 B R B_R BR: B R C = { σ ( Conv C [ B C ; B R ] ) ⊙ B C } ⊕ { σ ( Conv R [ B R ; B C ] ) ⊙ B R } B_{RC}=\{\sigma(\text{Conv}_C[B_C;B_R])\odot B_C\}\oplus\{\sigma(\text{Conv}_R[B_R;B_C])\odot B_R\} BRC={σ(ConvC[BC;BR])⊙BC}⊕{σ(ConvR[BR;BC])⊙BR}其中 B R C B_{RC} BRC表示融合BEV特征图, σ ( ⋅ ) \sigma(\cdot) σ(⋅)表示sigmoid函数, ⊙ \odot ⊙、 ⊕ \oplus ⊕和 [ ⋅ ; ⋅ ] [\cdot;\cdot] [⋅;⋅]分别表示按元素乘法、按元素加法和通道拼接。然后, B R C B_{RC} BRC以和基准方案BEVFormer相同的方式,通过归一化和前馈网络。重复BEV编码器(本节所有内容) L L L次后,生成最终的BEV特征图。和BEVFormer相比,本文的方法可以生成更精确的BEV特征图(特征更集中在真实边界框附近),而前者缺少足够的深度信息。
3.3. 雷达网格点修正
提案感知的雷达注意力(PRA)将3D提案和相关联的雷达点云作为输入,使用基于MLP的注意力决定每个点的重要程度。然后使用雷达网格点池化(RGPP),考虑雷达点的特性和分布采样网格点,并将雷达点和多尺度图像的特征聚合到网格点中,生成细化特征。细化特征和初始提案特征组合产生最终输出。
提案感知的雷达注意力:使用CRAFT中的软极性关联(SPA)将雷达点与3D提案关联。首先将3D提案和雷达点转换到极坐标系下,然后将径向距离和水平角均在一定范围内的雷达点与3D提案关联。但这样会使更多的点与3D提案关联,因为该范围比3D提案更大。引入PRA,设 b = ( c , w , l , h , θ , v pred ) b=(\mathbf{c},w,l,h,\theta,\mathbf{v}_\text{pred}) b=(c,w,l,h,θ,vpred)表示一个3D提案,其中心位置为 c \mathbf{c} c,3D尺寸为 ( w , l , h ) (w,l,h) (w,l,h),朝向角为 θ \theta θ,速度为 v pred \mathbf{v}_\text{pred} vpred。与 b b b相关联的 K K K个雷达点记为 { r k } k = 1 K \{r_k\}_{k=1}^K {rk}k=1K,其中第 k k k个点的位置为 u k ∈ R 3 \mathbf{u}_k\in\mathbb{R}^3 uk∈R3。引入逐点的分数向量 s k s_k sk来决定每个点的重要程度,得到被关注的雷达点特征 a k a_k ak: s k = MLP 2 ( [ MLP 1 ( r k ) ; δ ( c − u k ) ] ) a k = Softmax ( s k ) ⊙ MLP 3 ( r k ) s_k=\text{MLP}_2([\text{MLP}_1(r_k);\delta(\mathbf{c}-\mathbf{u}_k)])\\a_k=\text{Softmax}(s_k)\odot\text{MLP}_3(r_k) sk=MLP2([MLP1(rk);δ(c−uk)])ak=Softmax(sk)⊙MLP3(rk)其中MLP沿通道维度处理, δ ( ⋅ ) \delta(\cdot) δ(⋅)表示位置编码。
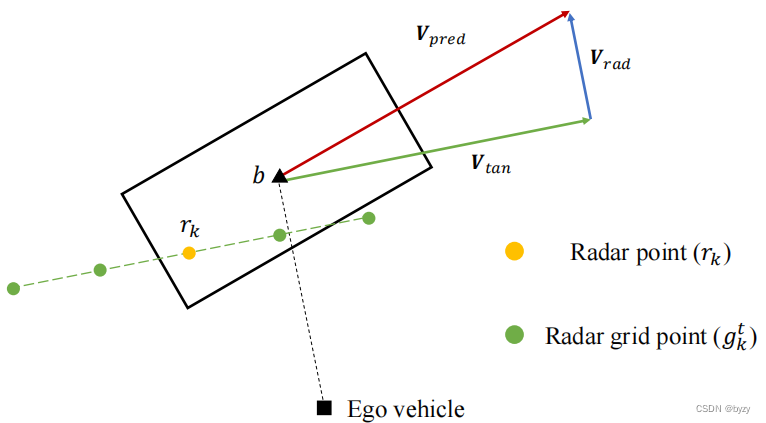
雷达网格点池化:网格点的位置和数量对基于网格点的修正模块来说是最重要的。考虑到雷达点的位置误差和稀疏程度,本文提出RGPP。如上图所示,3D提案的速度向量 v pred \mathbf{v}_\text{pred} vpred可分解为切向速度 v tan \mathbf{v}_\text{tan} vtan和径向速度 v rad \mathbf{v}_\text{rad} vrad。对第 k k k个雷达点 r k r_k rk, T T T个网格点 { g k t } t = 0 T − 1 \{g_k^t\}_{t=0}^{T-1} {gkt}t=0T−1按如下方式被生成在位置 u k \mathbf{u}_k uk附近: γ = { ρ min , ∣ v tan ∣ ≤ ρ min ∣ v tan ∣ , ρ min < ∣ v tan ∣ < ρ max ρ max , ∣ v tan ∣ ≥ ρ max g k t = γ ⋅ ( t T − 1 − 1 2 ) ⋅ v tan ∣ v tan ∣ + u k , t = 0 , ⋯ , T − 1 \gamma=\left\{\begin{matrix} \rho_{\min}, & |\mathbf{v}_{\tan}|\leq\rho_{\min}\\ |\mathbf{v}_{\tan}|, & \rho_{\min}<|\mathbf{v}_{\tan}|<\rho_{\max}\\ \rho_{\max}, & |\mathbf{v}_{\tan}|\geq\rho_{\max} \end{matrix}\right.\\g_k^t=\gamma\cdot \left(\frac{t}{T-1}-\frac{1}{2}\right)\cdot \frac{\mathbf{v}_{\tan}}{|\mathbf{v}_{\tan}|}+\mathbf{u}_k, \;\;\; t=0,\cdots,T-1 γ=⎩ ⎨ ⎧ρmin,∣vtan∣,ρmax,∣vtan∣≤ρminρmin<∣vtan∣<ρmax∣vtan∣≥ρmaxgkt=γ⋅(T−1t−21)⋅∣vtan∣vtan+uk,t=0,⋯,T−1
本文沿速度切向( v tan \mathbf{v}_{\tan} vtan)创建网格点,这是因为雷达点通常在切向更具噪声。网格点的距离与切向速度 v tan \mathbf{v}_{\tan} vtan的大小相关。这样,对该3D提案有 K T KT KT个网格点。然后使用最远点采样选择 M M M个网格点 { g m } m = 1 M \{g_m\}_{m=1}^M {gm}m=1M。
然后使用集合抽象(SetAbs)编码每个网格点 g m g_m gm周围的雷达点,得到雷达点特征 F m pts F_m^\text{pts} Fmpts: F m pts = SetAbs ( { a k } k = 1 K , { r k } k = 1 K , g m ) F_m^\text{pts}=\text{SetAbs}(\{a_k\}_{k=1}^K,\{r_k\}_{k=1}^K,g_m) Fmpts=SetAbs({ak}k=1K,{rk}k=1K,gm)同时,网格点被投影到图像特征图 F C F_C FC上通过双线性采样得到图像特征 F m img F_m^\text{img} Fmimg: F m img = Bilinear ( F C , proj ( g m ) ) F_m^\text{img}=\text{Bilinear}(F_C,\text{proj}(g_m)) Fmimg=Bilinear(FC,proj(gm))其中 proj ( ⋅ ) \text{proj}(\cdot) proj(⋅)表示投影过程。最后按下式获得提案特征: F m obj = maxpool ( F m pts ⊕ F m img ) F_m^\text{obj}=\text{maxpool}(F_m^\text{pts}\oplus F_m^\text{img}) Fmobj=maxpool(Fmpts⊕Fmimg)上述提案特征会与初始提案特征融合进行3D提案的修正。
3.4. 雷达数据预处理
本文通过降低判断雷达点是否有效的严格性和多帧积累(进行自车运动补偿和点运动补偿)增加雷达点云的密度。
4. 实验
4.2. 实施细节
图像分支使用FCOS3D的预训练权重,雷达分支从头训练。训练时使用类别平衡策略CBGS。
4.3. 数据增广
通过关联雷达点与图像像素,使用图像数据增广和BEV数据增广;在极坐标下使用GT增广,并使用方法增加非空(即含雷达点的)真实边界框的数量。
4.4. nuScenes数据集上的结果
本文方法的性能能大幅超过基于相机的和基于相机-雷达融合的方法。
4.5. nuScenes验证集上的消融实验
组件分析:RGBQ能带来最高的性能提升,而RCG,RGPP和RPA能带来少量性能提升。
雷达网格点采样的作用:与不适用网格点的方法以及常规网格点生成方法相比,本文的自适应网格点生成方法的性能最优。常规网格点的生成会受到稀疏雷达的特性影响,而导致某些网格点周围不含雷达点,从而减少有效网格点的数量。
数据增广:图像数据增广和BEV数据增广均能显著增加性能;极坐标GT增广能略微增加性能。
雷达点过滤:通过适当过滤原始雷达点能带来一定的性能提升。
相关文章:
【论文笔记】RCM-Fusion: Radar-Camera Multi-Level Fusion for 3D Object Detection
原文链接:https://arxiv.org/abs/2307.10249 1. 引言 目前的一些雷达-相机融合3D目标检测方法进行实例级的融合,从相机图像生成3D提案,并与雷达点云相关联以修正提案。但这种方法没有在最初阶段使用雷达,依赖于相机3D检测器&…...
STM32-风速传感器(ADC)
目录 0 说明 1 传感器介绍 2 代码说明 2.1 ADC.c 2.2 adc.h 2.3 main.c 0 说明 本篇文章主要是说明怎么使用STM32单片机读取风速传感器采集到的数据,读取方式是ADC,并且附带着STM32所需要的全部代码,所使用的风速传感器如下图所示。 附&am…...

【conda】配置国内镜像源
【conda】配置国内镜像源 1、官方2、国内常用镜像3、配置查看当前conda配置设置搜索是显示通道地址 4、清除缓存5、恢复默认全部删除指定删除 1、官方 https://docs.conda.io/projects/conda/en/latest/configuration.html 2、国内常用镜像 https://developer.aliyun.com/mi…...
python森林生物量(蓄积量)数据处理到随机森林估算全流程
python森林生物量(蓄积量)估算全流程 一.哨兵2号获取/处理/提取数据1.1 影像处理与下载采用云概率影像去云采用6S模型对1C级产品进行大气校正geemap下载数据到本地NDVI 1.2 各种参数计算(生物物理变量、植被指数等)LAI:…...

使用Freemarker模版导出xls文件使用excel打开提示文件损坏
本文是通过一步步的还原事件的发生并解决的一个过程记录,如果想知道如何解决的可以直接跳转文章末尾结论部分 提示一下,关注一下 Table 标签中的 ss:ExpandedRowCount 属性 解决的问题 在项目中使用freemarker的xml模板导出xls格式的Excel文件时…...

初识Linux
今天简单了解了关于操作系统的发展史,学习了在Linux中如何远程连接云服务器的指令,以及在Linux中创建多个用户的指令。 1. ssh root 服务器远程地址 作用是用来连接XShell与云服务器,输入该指令后会自动生成输入密码的窗口,如…...

python——案例六:清空列表用clear()方法实现
案例六:清空列表用clear()方法实现LIST[0,1,2,3,4,5] print(清空前:,LIST) LIST.clear() print(清空后:,LIST)...
测试|Selenium之WebDriver常见API使用
测试|Selenium之WebDriver常见API使用 文章目录 测试|Selenium之WebDriver常见API使用1.定位对象(findElement)css定位xpath定位css选择器语法:xpath语法:校验结果 2.操作对象鼠标点击对象在对象上模拟按键输入clear清除对象输入的文本内容su…...
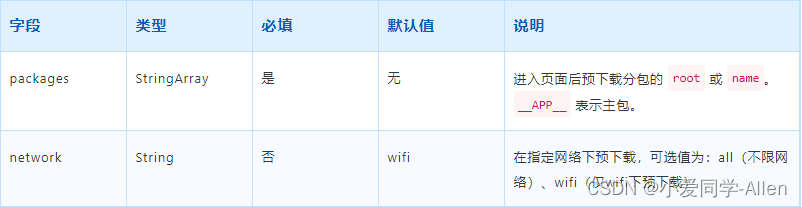
手把手教你uniapp和小程序分包
分包目的在于提高小程序的体积,多一个包就多2M,最多20M 常规的分包: 小程序一打开首先加载主包,然后再加载分包 分包可以用主包内的资源,主包不可以使用分包的资源 分包A不可以使用分包B里面的内容 分包可以使用a…...
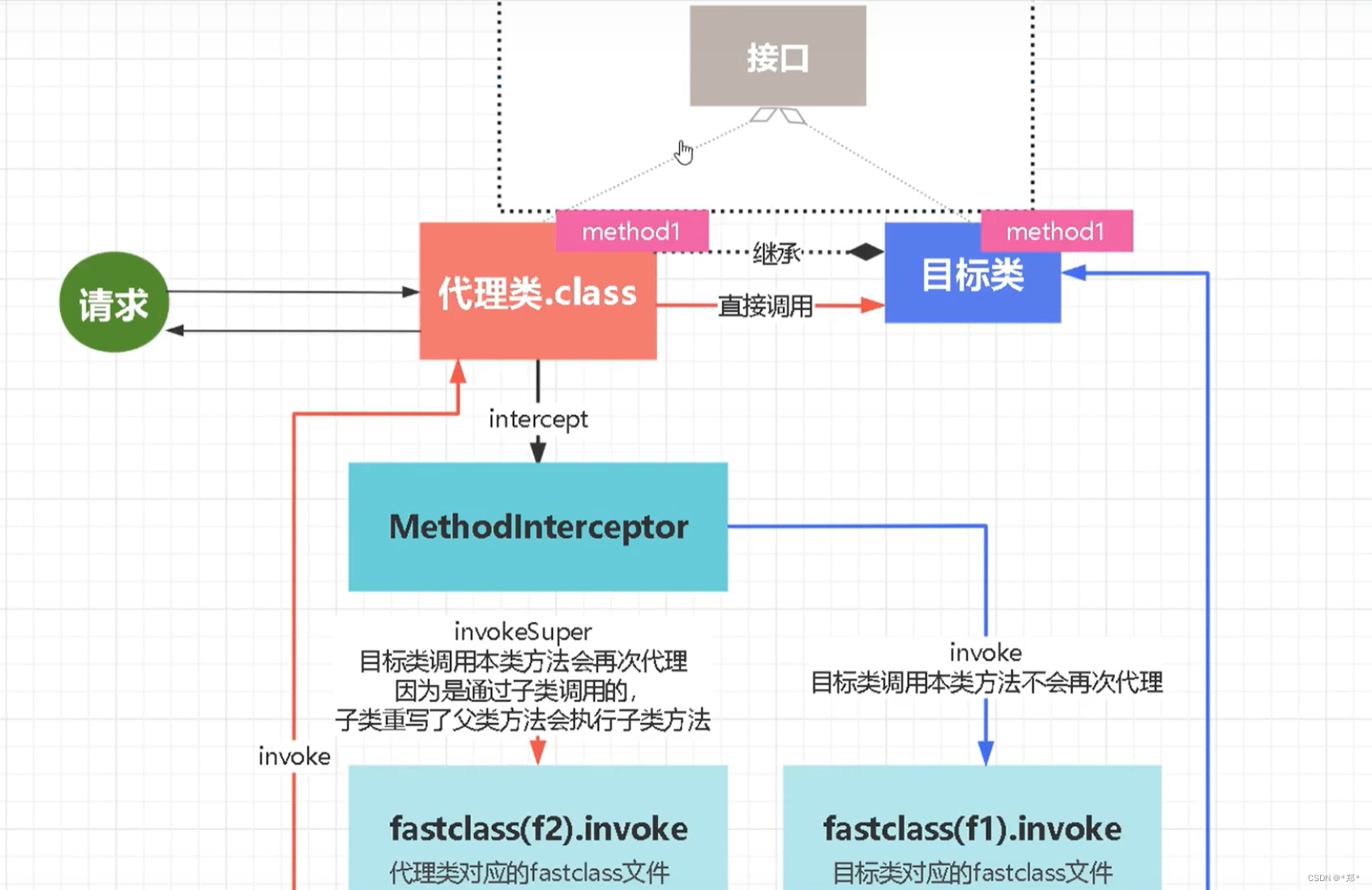
Java中的代理模式
Java中的代理模式 1. 静态代理2. JDK动态代理3. CGLib动态代理 1. 静态代理 接口 public interface ICeo {void meeting(String name) throws InterruptedException; }目标类 public class Ceo implements ICeo{public void meeting(String name) throws InterruptedExcepti…...

LeetCode每日一题——1331.数组序号转换
题目传送门 题目描述 给你一个整数数组 arr ,请你将数组中的每个元素替换为它们排序后的序号。 序号代表了一个元素有多大。序号编号的规则如下: 序号从 1 开始编号。一个元素越大,那么序号越大。如果两个元素相等,那么它们的…...
2、Tomcat介绍(下)
组件分类 在Apache Tomcat中,有几个顶级组件,它们是Tomcat的核心组件,负责整个服务器的运行和管理。这些顶级组件包括: Server(服务器):Tomcat的server.xml配置文件中的<Server>元素代表整个Tomcat服务器实例。每…...
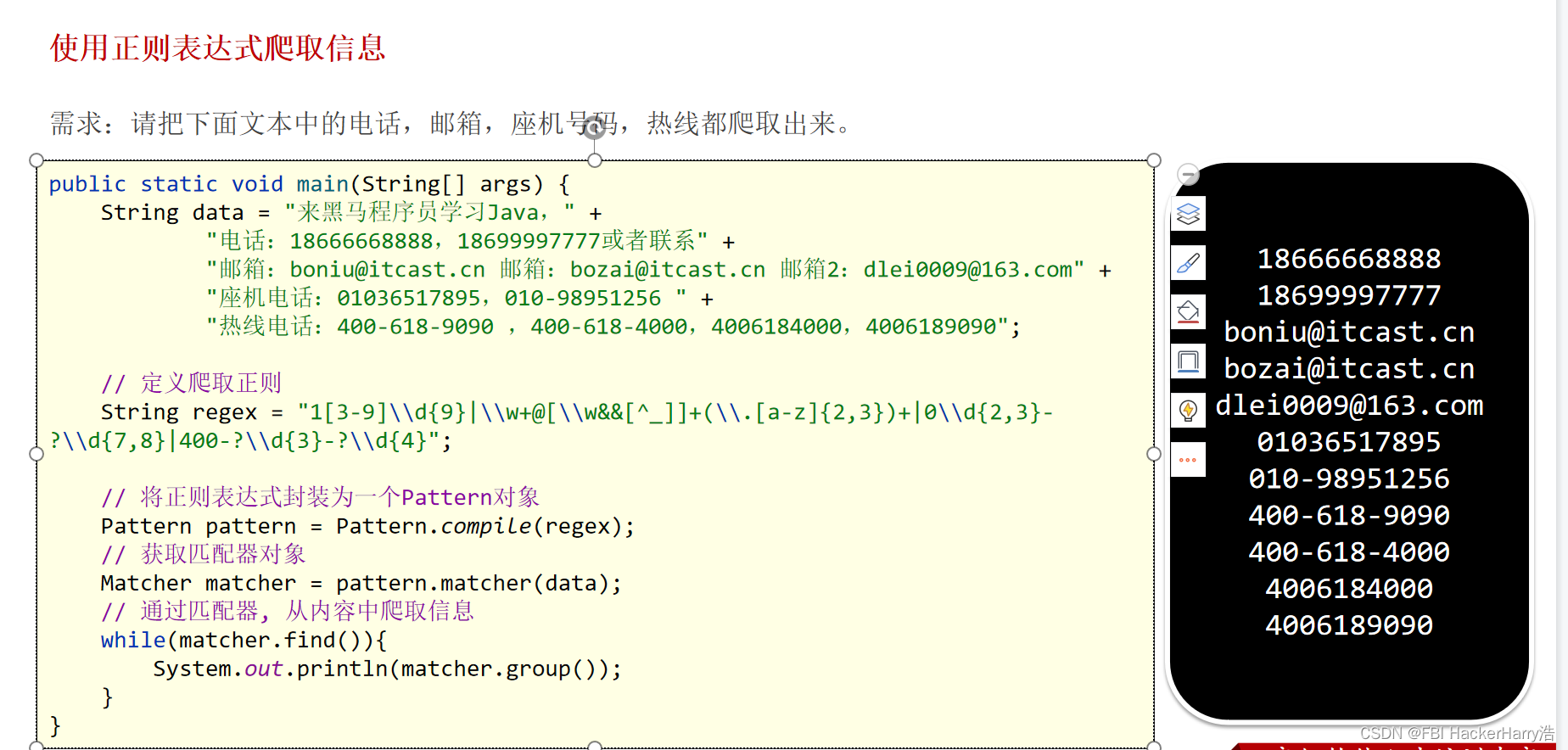
JAVA 正则表达式(heima)
JAVA 正则表达式(heima) public class RegexDemo01 {/** 正则表达式介绍:本质来说就是一个字符串,字符串中可以指定规则,来对其他字符串进行校验。* public boolean matches(String regex):根据传入的正则表达式&#…...
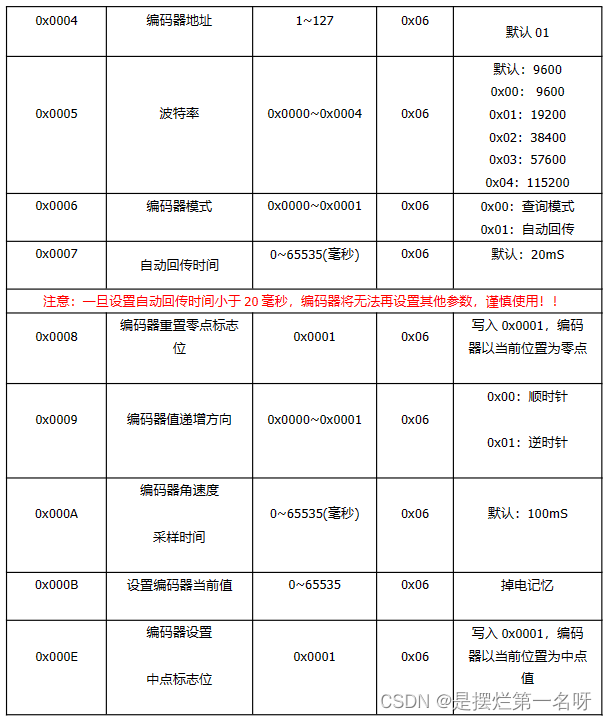
布瑞特单圈绝对值旋转编码器串口数据读取
布瑞特单圈绝对值旋转编码器串口数据读取 数据手册:http://briter.net/col.jsp?id109 (2.1版本RS485说明书通信协议 单圈.pdf) 绝对式编码器为布瑞特BRT38-ROM16384-RT1,采用RS485通信。 该绝对式编码器共有5根线:红、黄、黑、绿、白 由…...
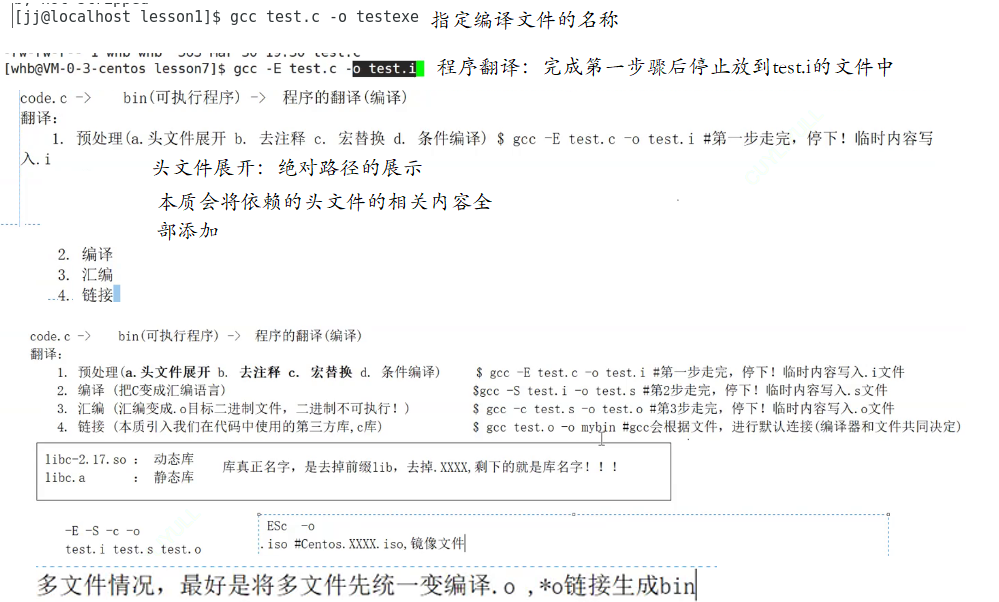
Linux第六章之vim与gcc使用
一、Linux编辑器-vim使用 vi/vim的区别简单点来说,它们都是多模式编辑器,不同的是vim是vi的升级版本,它不仅兼容vi的所有指令,而且还有一些新的特性在里面。例如语法加亮,可视化操作不仅可以在终端运行,也…...
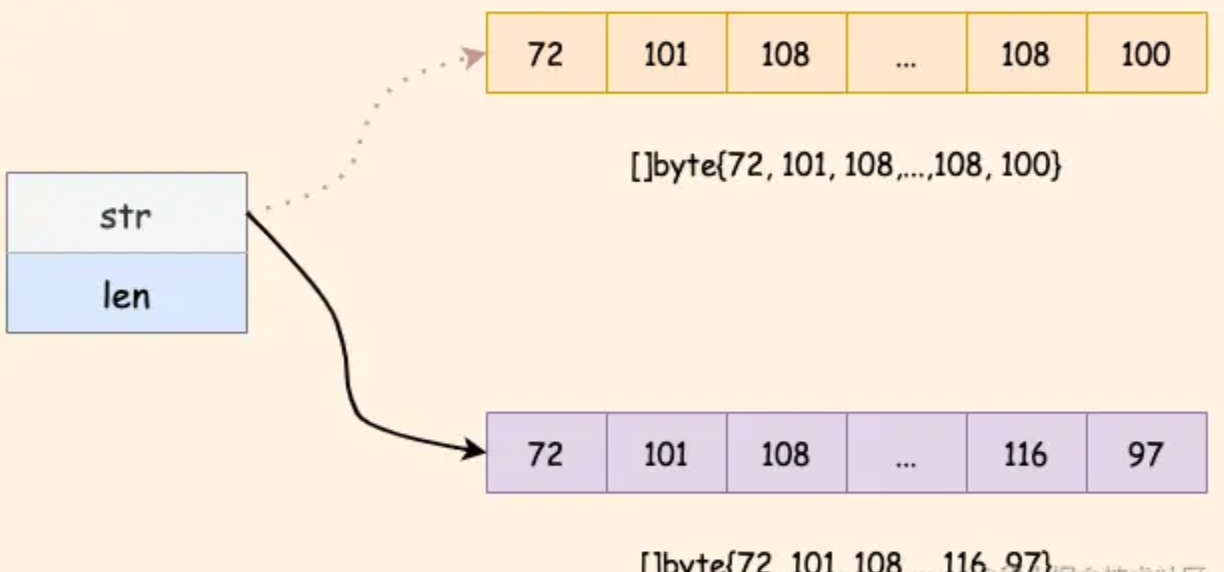
【Golang】Golang进阶系列教程--为什么说 Go 语言字符串是不可变的?
文章目录 前言推荐阅读 前言 最近有读者留言说,平时在写代码的过程中,是会对字符串进行修改的,但网上都说 Go 语言字符串是不可变的,这是为什么呢? 这个问题本身并不困难,但对于新手来说确实容易产生困惑…...
ES开启身份认证
文章目录 X-Pack简介之前的安全方案ES开启认证ES服务升级https协议开启集群节点之间的证书认证 X-Pack简介 X-Pack是Elastic Stack扩展功能,提供安全性,警报,监视,报告,机器学习和许多其他功能。 X-Pack的发展演变&am…...
Docker安装es以及ik分词器
1、拉取镜像 docker pull elasticsearch:7.10.12、下载对应版本的ik分词、并将它们解压到ik文件夹下,如图 https://github.com/medcl/elasticsearch-analysis-ik/releases 3、在服务器上创建文件夹 mkdir /usr/elklog/elk/es mkdir /usr/elklog/elk/es/data mkdi…...

中断、进程调度、进程切换、系统调用,模式切换的那些事情
提示:风萧声动,玉壶光转,一夜鱼龙舞 文章目录 前言中断进程调度进程切换线程切换模式切换所以他们有什么关系? 前言 本文内容主要参考以下几个博文中学得 进程与线程(中)的2.2.7 进程切换VS模式切换&#…...
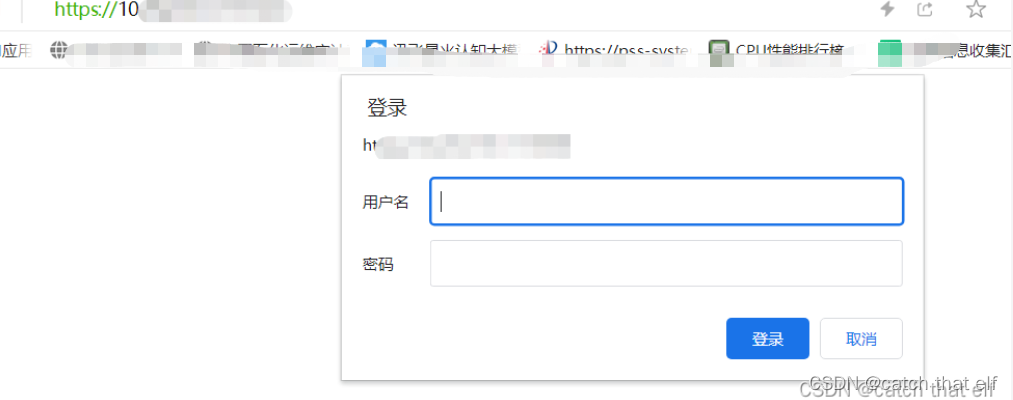
使用web-view实现网页端和uni-app端是数据传输
要实现这个功能 第一步:要在vue的public文件夹下面引入 <script type"text/javascript" src"https://js.cdn.aliyun.dcloud.net.cn/dev/uni-app/uni.webview.1.5.2.js"></script> 第二步:建立一个新的空的uni-app项目…...

Eviews面板数据建模保姆级教程:从Hausman检验到模型选择,一次讲透固定效应与随机效应
Eviews面板数据建模实战指南:从数据导入到模型选择的完整流程 面板数据分析作为计量经济学中的重要工具,能够同时捕捉时间和个体维度的信息。对于刚接触Eviews的研究者来说,如何正确建立面板模型往往令人困惑——从数据准备到模型选择&#x…...

知识竞赛的“复活”机制:给落后者第二次机会
🔄 知识竞赛的“复活”机制:给落后者第二次机会包容偶然 挖掘潜力 见证逆袭🎯 引言在知识竞赛中,胜负往往取决于临场发挥、题型适应甚至运气。一次抢答失误、一道冷门题目,都可能让准备充分的选手遗憾离场。…...

技能与代码审计融合实践:构建安全开发思维与实战靶场
1. 项目概述:技能与代码审计的融合实践最近在和一些做安全开发的朋友聊天,大家普遍有个感受:现在单纯会写代码,或者单纯懂点安全皮毛,已经越来越不够用了。一个功能上线,开发觉得逻辑完美,但安全…...

RISC-V PLIC中断控制器详解:从原理到SiFive U54实战配置
1. 平台级中断控制器(PLIC)是什么?为什么需要它?如果你正在接触基于RISC-V架构的嵌入式系统开发,尤其是像SiFive U54这样的多核处理器,那么“PLIC”这个缩写会频繁地出现在你的视野里。它全称是Platform-Le…...

明日方舟游戏素材宝库:8000+高清美术资源免费获取终极指南
明日方舟游戏素材宝库:8000高清美术资源免费获取终极指南 【免费下载链接】ArknightsGameResource 明日方舟客户端素材 项目地址: https://gitcode.com/gh_mirrors/ar/ArknightsGameResource 你是否曾为寻找高质量的游戏美术素材而烦恼?无论是角色…...

Vue 3 Composition API驱动下的企业级日期时间选择器架构演进与实践
Vue 3 Composition API驱动下的企业级日期时间选择器架构演进与实践 【免费下载链接】vue3-date-time-picker Datepicker component for Vue 3 项目地址: https://gitcode.com/gh_mirrors/vu/vue3-date-time-picker 在现代化Web应用开发中,日期时间选择器作为…...

npm ERR! 401 认证失败全解析:从私有包权限到 .npmrc 配置的实战排错指南
1. 遇到npm ERR! 401怎么办?先别慌 最近在项目里执行npm install时,突然蹦出个npm ERR! 401 Unauthorized的错误,相信不少前端开发者都遇到过这个烦人的问题。我第一次碰到时也是一头雾水,明明昨天还能正常安装依赖,怎…...

马上开课!因果推断与机器学习训练营,10天带你写出能“下结论”的论文!
为什么有些人服药后康复,而另一些人却毫无改善?为什么大学学位能改变收入水平?这些如果……会怎样的问题,其实都属于因果推断的范畴。在医疗研究中,许多问题都涉及因果概念,因此因果推断在健康研究领域越来…...

别再用免费版硬扛交付!Pro计划中被低估的“商用素材合规审计工具”如何帮你规避97%版权风险?
更多请点击: https://intelliparadigm.com 第一章:商用素材合规审计工具的底层逻辑与风险图谱 商用素材合规审计工具并非简单的关键词扫描器,而是融合数字水印识别、元数据溯源、许可证语义解析与跨平台版权数据库比对的复合型决策引擎。其底…...

GPT Image 2刷屏后,AI赚钱的新门槛变了:向量引擎、deepseek v4、api和key怎么串成一个Agent工作流
GPT Image 2刷屏后,AI赚钱的新门槛变了:向量引擎、deepseek v4、api和key怎么串成一个Agent工作流最近 AI 圈有一种很奇妙的割裂感。 一边是大家刷到 GPT Image 2 的实测图,心里直呼:这也太真了吧?电影海报像真的&…...