驱动开发day8
编写LED灯的驱动,使用GPIO子系统,里面添加按键的中断处理
1.应用程序发送指令控制LED亮灭
2.按键1 按下,led1电位反转 按键2按下,led2电位反转 按键3 按下,led3电位反转
驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"
struct device_node *dev_key;
unsigned int irqno_key1;
unsigned int irqno_key2;
unsigned int irqno_key3;struct device_node *dev_led;
struct gpio_desc *gpiono_led1;
struct gpio_desc *gpiono_led2;
struct gpio_desc *gpiono_led3;int major;
struct class *cls;
struct device *dev;
// 中断处理函数
irqreturn_t myirq_handler_key1(int irq, void *dev)
{gpiod_set_value(gpiono_led1,!gpiod_get_value(gpiono_led1));return IRQ_HANDLED;
}
irqreturn_t myirq_handler_key2(int irq, void *dev)
{gpiod_set_value(gpiono_led2,!gpiod_get_value(gpiono_led2));return IRQ_HANDLED;
}
irqreturn_t myirq_handler_key3(int irq, void *dev)
{gpiod_set_value(gpiono_led3,!gpiod_get_value(gpiono_led3));return IRQ_HANDLED;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{switch (cmd){case LED_ON:switch (arg){case 1: // LED1gpiod_set_value(gpiono_led1,1);; // LED1开灯break;case 2: // LED2gpiod_set_value(gpiono_led2,1); // LED2开灯break;case 3: // LED3gpiod_set_value(gpiono_led3,1); // LED3开灯break;}break;case LED_OFF:switch (arg){case 1:gpiod_set_value(gpiono_led1,0);break;case 2:gpiod_set_value(gpiono_led2,0);break;case 3:gpiod_set_value(gpiono_led3,0);break;}break;}return 0;
}
struct file_operations fops = {.unlocked_ioctl = mycdev_ioctl,};
static int __init mycdev_init(void)
{int i;// 字符设备驱动注册major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);// 向上提交目录cls = class_create(THIS_MODULE, "myled");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录信息成功\n");// 向上提交设备节点信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点成功\n");int ret;// 解析按键的设备树节点dev_key = of_find_node_by_path("/myirq");if (dev_key == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");// 根据设备树节点解析出软中断号irqno_key1 = irq_of_parse_and_map(dev_key, 0); // 按键1索引号为0if (!irqno_key1){printk("解析软中断号失败\n");return -ENXIO;}printk("key1解析软中断号成功 irqno=%d\n", irqno_key1);irqno_key2 = irq_of_parse_and_map(dev_key, 1); // 按键1索引号为0if (!irqno_key2){printk("解析软中断号失败\n");return -ENXIO;}printk("key2解析软中断号成功 irqno=%d\n", irqno_key2);irqno_key3 = irq_of_parse_and_map(dev_key, 2); // 按键1索引号为0if (!irqno_key3){printk("解析软中断号失败\n");return -ENXIO;}printk("key3解析软中断号成功 irqno=%d\n", irqno_key3);// 注册中断ret = request_irq(irqno_key1, myirq_handler_key1, IRQF_TRIGGER_FALLING, "key1", NULL);if (ret){printk("注册中断失败\n");return ret;}printk("key1注册中断成功\n");ret = request_irq(irqno_key2, myirq_handler_key2, IRQF_TRIGGER_FALLING, "key2", NULL);if (ret){printk("注册中断失败\n");return ret;}printk("key2注册中断成功\n");ret = request_irq(irqno_key3, myirq_handler_key3, IRQF_TRIGGER_FALLING, "key3", NULL);if (ret){printk("注册中断失败\n");return ret;}printk("key3注册中断成功\n");// 根据设备树节点的路径解析设备树信息dev_led = of_find_node_by_path("/leds");if (dev_led == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");// 申请gpio_desc对象并设置输出为低电平gpiono_led1 = gpiod_get_from_of_node(dev_led, "led1-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono_led1)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono_led1);}printk("申请gpio_led1对象成功\n");gpiono_led2 = gpiod_get_from_of_node(dev_led, "led2-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono_led2)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono_led2);}printk("申请gpio_led1对象成功\n");gpiono_led3 = gpiod_get_from_of_node(dev_led, "led3-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono_led3)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono_led3);}printk("申请gpio_led1对象成功\n");return 0;
}
static void __exit mycdev_exit(void)
{// 注销中断free_irq(irqno_key1, NULL);free_irq(irqno_key2, NULL);free_irq(irqno_key3, NULL);// 灭灯gpiod_set_value(gpiono_led1, 0);// 释放gpio编号gpiod_put(gpiono_led1);// 灭灯gpiod_set_value(gpiono_led2, 0);// 释放gpio编号gpiod_put(gpiono_led2);// 灭灯gpiod_set_value(gpiono_led3, 0);// 释放gpio编号gpiod_put(gpiono_led3);int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录信息class_destroy(cls);// 注销字符设备驱动unregister_chrdev(major, "mychrdev");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");应用程序
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/ioctl.h>
#include "head.h"int main(int argc, char const *argv[])
{int a, b;char buf[128] = {0};int fd0 = open("/dev/mycdev0", O_RDWR);if (fd0 < 0){printf("打开设备文件失败\n");exit(-1);}int fd1 = open("/dev/mycdev1", O_RDWR);if (fd1 < 0){printf("打开设备文件失败\n");exit(-1);}int fd2 = open("/dev/mycdev2", O_RDWR);if (fd2 < 0){printf("打开设备文件失败\n");exit(-1);}while (1){// 从终端读取printf("请输入指令\n");printf("0(关灯) 1(开灯)\n");printf("请输入>");scanf("%d", &a);printf("请输入要控制的灯 1(LED1) 2(LED2) 3(LED3)>");scanf("%d", &b);switch (b){case 1:switch (a){case 1:ioctl(fd0, LED_ON); // 开灯break;case 0:ioctl(fd0, LED_OFF);break;}break;case 2:switch (a){case 1:ioctl(fd1, LED_ON); // 开灯break;case 0:ioctl(fd1, LED_OFF);break;}break;case 3:switch (a){case 1:ioctl(fd2, LED_ON); // 开灯break;case 0:ioctl(fd2, LED_OFF);break;}break;}}close(fd0);close(fd1);close(fd2);return 0;
}相关文章:

驱动开发day8
编写LED灯的驱动,使用GPIO子系统,里面添加按键的中断处理 1.应用程序发送指令控制LED亮灭 2.按键1 按下,led1电位反转 按键2按下,led2电位反转 按键3 按下,led3电位反转 驱动程序 #include <linux/init.h> #i…...

CAS 机制
问题分析与思考: CAS 是 Java 中 Unsafe 类里面的方法,它的全称是 CompareAndSwap,比较并交换 的意思。 它的主要功能是能够保证在多线程环境下,对于共享变量的修改的原子性。 举个例子,比如说有这样一个场景ÿ…...

#P1003. [NOIP2009普及组] 道路游戏
题目描述 小新正在玩一个简单的电脑游戏。 游戏中有一条环形马路,马路上有 nn 个机器人工厂,两个相邻机器人工厂之间由一小段马路连接。小新以某个机器人工厂为起点,按顺时针顺序依次将这 nn 个机器人工厂编号为 1\sim n1∼n,因…...

python-网络爬虫.regular
regular 正则表达式 (regular expression) 正则表达式(regular expression)描述了一种字符串匹配的模式 (pattern), 可以用来检查一个串是否含有某种子串、将匹配的子串替换或者从某个串 中取出符合某个条件的子串等。 正则表达式是由普通…...
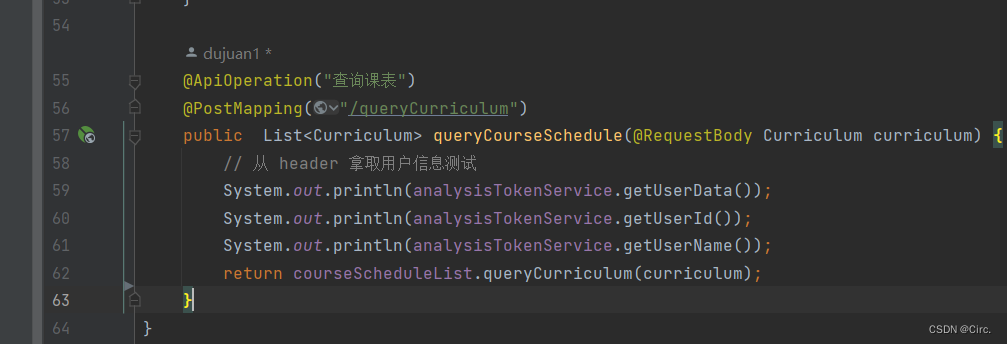
手动搭建gateway,项目集成gateway实现Token效果
目录 背景步骤1、首先创建springboot项目2、引入依赖3、配置文件!!!!!(超级重要!!!根据自己的需要进行配置)4、相关类我们在服务中进行的白名单中接口的操作如…...

linux下SVN服务器搭建
在本教程中,我们将介绍如何在Linux系统下搭建Subversion(SVN)服务器。Subversion是一种流行的版本控制系统,它允许多个人在同一项目上进行协作,同时避免了他们各自的更改发生冲突。 安装SVN 在大多数Linux发行版中&am…...
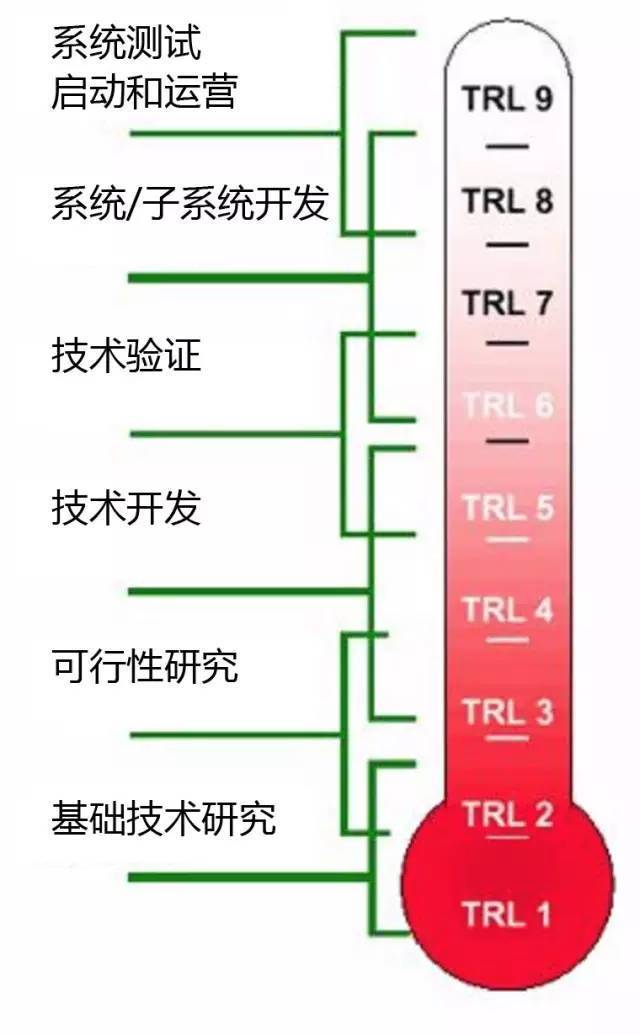
技术等级 TRL 定义
“不同环境、不同目标下TRL表述不一样” 技术等级 TRL 定义 TRL1 基本原理提出和发现 TRL2 技术应用研究 TRL3 完成概念验证,如叶栅试验、燃烧室头部试验等 TRL4 完成模拟部件试验.如压气机性能试验,燃烧室扇形试验 TRL5 完…...
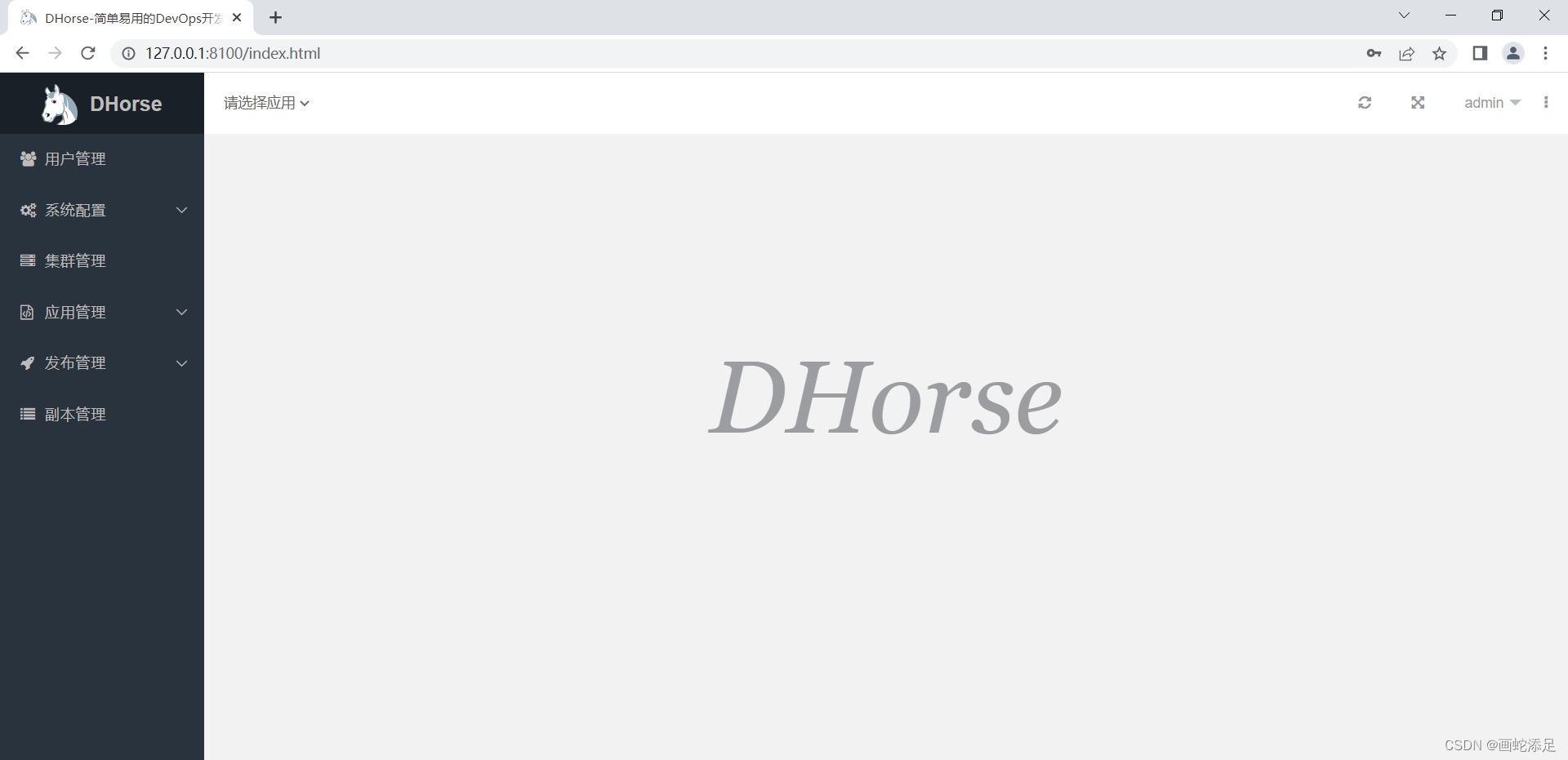
DHorse v1.3.0 发布,基于k8s的发布平台
综述 DHorse是一个简单易用、以应用为中心的云原生DevOps系统,具有持续集成、持续部署、微服务治理等功能,无需安装依赖Docker、Maven、Node等环境即可发布Java、Vue、React应用,主要特点:部署简单、操作简洁、功能快速。 新增特…...
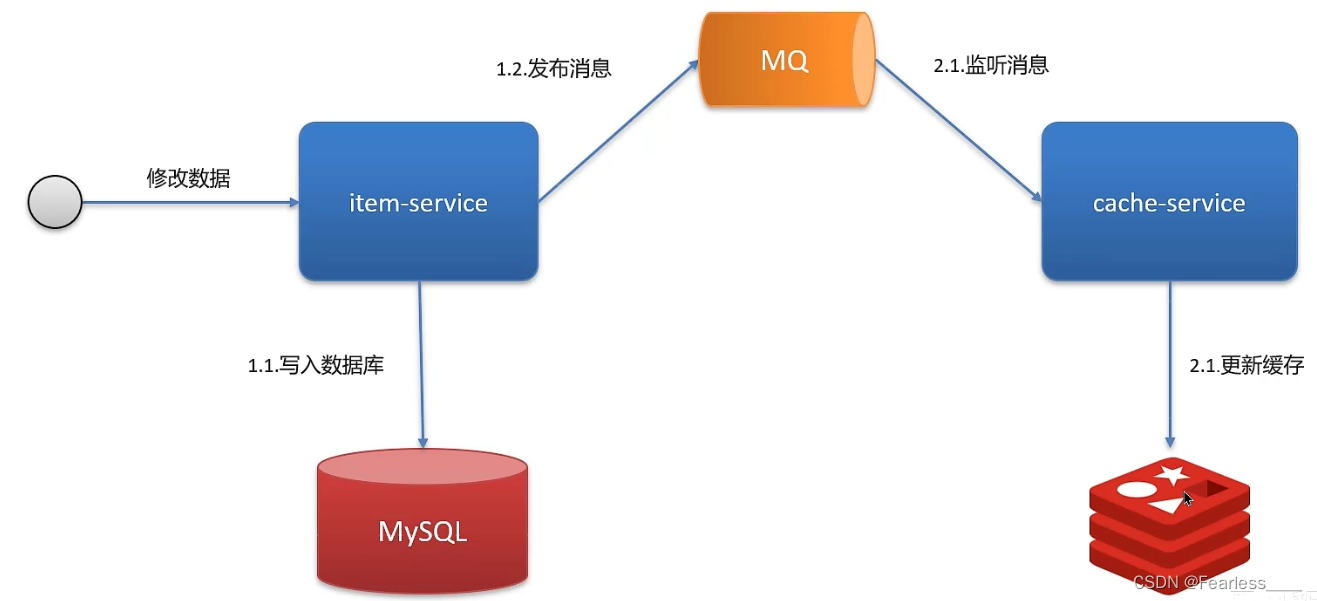
Redis - 缓存的双写一致性
概念: 当修改了数据库的数据也要同时更新缓存的数据,缓存和数据库的数据要保持一致 那为什么会有不一致的情况呢? 如果不追求一致性,正常有两种做法 先修改数据库 后删除旧的缓存先删除旧的缓存 再修改数据库 我们以先删除旧的…...

opencv03-Mat矩阵API的使用
opencv03-Mat矩阵API的使用 构造方法(具体介绍看API文档) int main() {Mat m1 Mat(200, 100, CV_8UC1);imshow("o1", m1);Mat m2 Mat(Size(100, 200), CV_8UC1);imshow("o2", m2);Mat m3 Mat(200, 100, CV_8UC3, Scalar(255, 0, 0));imshow("o3&…...

2023届浙江大学MPA提面A资格经验总结分享
本人是去年报考的浙大MPA项目,并通过提面获得了A资格,新一年浙大MPA项目提前批面试已经开始了,受达立易考周老师邀请来分享下我的提面经验,希望我的经验能对还在迷茫中的小伙伴有所帮助。 点开提面通知,首先看到…...
BugKu CTF(杂项篇MISC)—想要种子吗
BugKu CTF(杂项篇MISC)—想要种子吗 提 示: 描 述:flag{} 题目下载后是一张图片,打开如下。 一、工具 十六进制编辑器010 editor kali系统文件分离工具binwalk或者foremost 维吉尼亚密码 STEGHIDE图片隐写工具 文章所需的软件下载地址 ARCHPR压缩包密码破解…...
类之间的关系
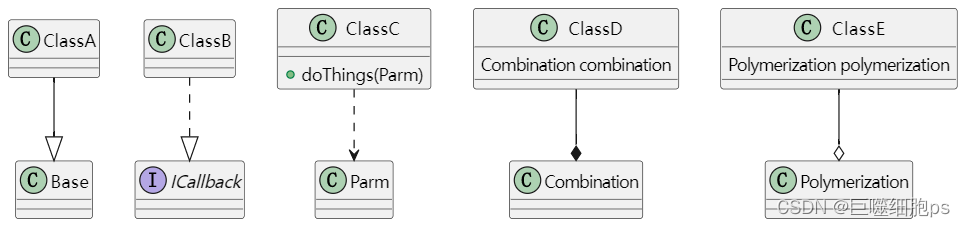
1、类关系 继承、实现、依赖、组合、聚合 继承:一个类继承另一个类; 实现:一个类实现另一个接口; 依赖:一个类作为另一个的局部变量,方法的参数,临时对象等; 组合:一个类…...
【蓝图】p40-p43对象引用、变量有效性、实现键盘控制物体自转、简单点名系统
p40-p43对象引用、变量有效性、实现键盘控制物体自转、简单点名系统 p40对象引用、变量有效性p41实现键盘控制物体自转创建bool值控制旋转实现通过键盘控制自转 p42p43简单点名系统Get All Actors Of Class(获得场景中所有该类的actor演员)getFor Each L…...
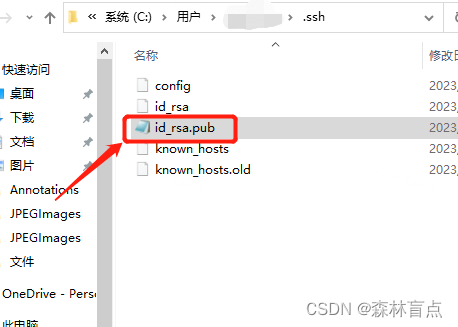
vscode设置远程登录和免密登录
首先,我们去官网下载VScode 安装过程比较简单,大家自行安装即可,注意建议安装在除C盘外的其他盘中。 安装完成后,打开我们下载好的VScode,点击左侧的Extensions选项,搜索Remote,Install第一项R…...

今日头条面试真题及答案,软件测试工程师面试秘籍
试题1.在浏览器地址栏里输入一个网址,接下来会发生什么? 答案:发生的操作如下。 (1)浏览器查找该网址的IP地址。 (2)浏览器根据解析得到的IP地址向Web服务器发送一个HTTP请求。 &am…...

JavaScript Windows 浏览器对象模型
Window 对象 BOM 的核心就是 window 对象所有浏览器都支持 window 对象。它表示浏览器窗口。所有 JavaScript 全局对象、函数以及变量均自动成为 window 对象的成员。全局变量是 window 对象的属性。全局函数是 window 对象的方法。HTML DOM 的 document 也是 window 对象的属…...

【uniapp 获取缓存及清除缓存】
小程序及H5 获取缓存: 使用uniapp中的wx.getStorageInfoSync()方法可以获取当前小程序或H5应用的本地缓存信息,如下所示: let storageInfo uni.getStorageInfoSync() console.log(storageInfo)其中,storageInfo是一个对象&…...

【vim 学习系列文章 2 - vim 常用插件配置】
文章目录 1.1 vim 常用插件1.1.1 vim 插件 Pathogen 管理1.1.2 vim 常用插件推荐1.1.3 vim Leaderf1.1.4 vim ripgrep 工具1.1.5 vim Leaderf 配合 rg1.1.6 vim autocmd 配置 1.2 其它类型文件 vimrc 配置1.2.1 System Verilog vimrc 配置 上篇文章:vim 学习系列文章…...
【外卖系统】修改菜品
需求分析 在菜品管理列表页面点击修改按钮,跳转到修改页面,在修改页面回显菜品相关信息并进行修改,在最后点击确定按钮完成修改操作 代码设计 页面发送ajax请求,请求服务端获取分类数据,用于菜品分类下拉框中数据显…...

别再死记硬背了!用SPSS搞定系统聚类法,手把手教你从数据录入到谱系图解读
SPSS系统聚类法实战:从数据导入到商业解读的全流程指南 当你的数学建模作业截止日期临近,或者老板突然要求对市场调研数据进行分类分析时,系统聚类法往往是救命稻草。但传统教材中复杂的距离矩阵计算和迭代过程,常让初学者望而生畏…...

PD SINK芯片选型指南:从核心参数到实战场景的深度解析
1. 项目概述:为什么PD SINK芯片选型是门技术活最近在做一个带Type-C充电口的便携设备项目,客户明确要求必须支持主流的快充协议,尤其是USB PD。这让我不得不重新审视一个看似简单、实则暗藏玄机的环节:PD SINK协议芯片的选型。你可…...

3步搞定抖音资源下载:免费高效的douyin-downloader完整指南
3步搞定抖音资源下载:免费高效的douyin-downloader完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback …...

基于RAG的LLM知识库构建:从智能分块到检索增强生成实战
1. 项目概述:一个为大型语言模型量身定制的知识库构建工具如果你和我一样,经常和大型语言模型打交道,无论是用它们来辅助编程、分析文档,还是构建问答系统,那你一定遇到过这个核心痛点:如何让模型精准地理解…...

图像超分新SOTA:DAT模型凭什么在效果和效率上双赢?深入对比SwinIR、EDSR等经典方案
DAT模型:图像超分辨率领域的效率与效果平衡术 当一张模糊的老照片在算法处理后突然变得清晰可辨时,这种"魔法"背后是图像超分辨率技术的精妙演化。在这个领域,Transformer架构近年来展现出惊人的潜力,却也面临着计算复…...
)
ESP32开发板Flash型号傻傻分不清?教你用esptool.py一键查询并看懂ID(附厂商对照表)
ESP32开发板Flash型号识别全攻略:从ID解析到厂商对照 当你拿到一块ESP32开发板或模组时,是否经常遇到这样的困惑:Flash芯片的具体型号和容量不明,导致在menuconfig配置时无从下手?这种"盲盒"体验确实让人头疼…...

深入解析Android网络通信框架:OkHttp与Retrofit原理与实践
第一章:引言 移动互联网时代,网络通信是Android应用的核心能力之一。OkHttp与Retrofit作为Android生态中最主流的网络通信框架,已成为开发者必须掌握的技术栈。本章将简要介绍二者在项目中的定位及其技术演进历程。 第二章:OkHttp核心原理剖析 2.1 OkHttp架构设计 OkHtt…...
)
GalaxyView和Halcon抢相机?手把手教你解决USB3.0大恒相机驱动冲突(附优先级切换技巧)
多视觉软件共存环境下的USB3.0相机驱动冲突深度解析与实战解决方案 在工业视觉和自动化检测领域,工程师常常需要同时使用多种视觉软件来完成不同的任务。Halcon以其强大的算法库著称,而GalaxyView则在相机控制和图像采集方面表现出色。但当这些软件共存于…...

智慧能耗管理系统:嵌入式工控机在工业节能中的核心应用
1. 工厂能耗管理的痛点与智能化转型契机 在制造业摸爬滚打十几年,我见过太多工厂在能耗管理上的“粗放式”经营。电费单是每个月固定的大额支出,但具体电用在了哪里,哪个车间、哪条产线、甚至哪台设备是“电老虎”,很多时候都是一…...

从‘KN’与‘taoN’反推Kp/Ki:一个让电机PI整定思路瞬间清晰的视角
从系统级特性反推PI参数:基于KN与taoN的电机控制整定方法论 在电机控制领域,PI参数整定一直是工程师面临的经典难题。传统方法往往直接调整Kp和Ki,却忽略了这两个参数背后隐藏的系统级特性——开环增益KN与微分时间常数taoN。这种"只见树…...