登月再进一步:Apollo自动驾驶的里程碑
前言

「作者主页」:雪碧有白泡泡
「个人网站」:雪碧的个人网站
「推荐专栏」:
★java一站式服务 ★
★前端炫酷代码分享
★ ★ uniapp-从构建到提升★
★ 从0到英雄,vue成神之路★
★ 解决算法,一个专栏就够了★
★ 架构咱们从0说★
★ 数据流通的精妙之道★

文章目录
- 前言
- ୧⍤⃝介绍Apollo自动驾驶
- 🎀1.1 Apollo自动驾驶的背景和发展
- 🎀1.2 Apollo自动驾驶的核心技术
- 🎀1.3 Apollo在市场上的应用和前景
- ୧⍤⃝Apollo自动驾驶的核心技术
- 🎀2.1 传感器技术和数据采集
- 1. 使用激光雷达传感器获取点云数据:
- 2. 使用摄像头传感器捕获图像数据:
- 3. 使用雷达传感器获取距离和速度数据:
- 🎀2.2 人工智能与机器学习在Apollo中的应用
- 1. 目标检测:
- 2. 目标跟踪:
- 3. 行为预测:
- 🎀2.3 高精度地图与定位技术
- 1. 创建地图对象:
- 2. 获取道路信息:
- 3. 定位车辆:
- 🎀2.4 感知与障碍物检测
- 🎀2.5 路径规划与决策算法
- 🎀2.6 控制与执行系统
- ୧⍤⃝Apollo在市场上的应用和前景
- 🎀3.1 Apollo自动驾驶在私家车领域的应用
- 🎀3.2 Apollo自动驾驶在商业运输领域的应用
- 🎀3.3 Apollo自动驾驶的竞争对手分析
- 🎀3.4 Apollo自动驾驶面临的挑战与未来发展趋势
୧⍤⃝介绍Apollo自动驾驶
🎀1.1 Apollo自动驾驶的背景和发展
Apollo自动驾驶是百度公司(Baidu)开发的一款自动驾驶技术平台。它起源于百度成立的自动驾驶实验室,旨在推动自动驾驶技术的研究与发展。自2017年起,Apollo自动驾驶逐渐成为全球自动驾驶领域的重要参与者。

🎀1.2 Apollo自动驾驶的核心技术
Apollo自动驾驶的核心技术包括传感器技术和数据采集、人工智能与机器学习、高精度地图与定位技术、感知与障碍物检测、路径规划与决策算法以及控制与执行系统等方面。
🎀1.3 Apollo在市场上的应用和前景
Apollo自动驾驶已经在不同领域展示了广泛的应用前景。它可以用于私家车领域的自动驾驶汽车,提供更安全、便捷的交通方式。此外,Apollo还可以应用于商业运输领域,提高货运效率并降低成本。随着技术的不断发展和成熟,Apollo在市场上的应用前景将进一步扩大。

୧⍤⃝Apollo自动驾驶的核心技术
🎀2.1 传感器技术和数据采集
Apollo自动驾驶使用了多种传感器,如激光雷达、摄像头、雷达等,以获取周围环境的数据。通过传感器技术和数据采集,Apollo能够实时感知车辆周围的道路、障碍物和其他交通参与者。
1. 使用激光雷达传感器获取点云数据:
import rospy
from sensor_msgs.msg import PointCloud2def point_cloud_callback(msg):# 处理点云数据passdef main():rospy.init_node('point_cloud_subscriber')rospy.Subscriber('/apollo/sensor/lidar_front/PointCloud2', PointCloud2, point_cloud_callback)rospy.spin()if __name__ == '__main__':main()
2. 使用摄像头传感器捕获图像数据:

import cv2def main():camera = cv2.VideoCapture(0) # 0表示第一个摄像头设备while True:ret, frame = camera.read() # 读取摄像头帧if not ret:break# 处理图像帧cv2.imshow('Camera', frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcamera.release()cv2.destroyAllWindows()if __name__ == '__main__':main()
3. 使用雷达传感器获取距离和速度数据:
import rospy
from sensor_msgs.msg import LaserScandef laser_scan_callback(msg):ranges = msg.ranges # 每个角度的距离值intensities = msg.intensities # 强度值(如果可用)# 处理激光扫描数据passdef main():rospy.init_node('laser_scan_subscriber')rospy.Subscriber('/apollo/sensor/lidar_front/LaserScan', LaserScan, laser_scan_callback)rospy.spin()if __name__ == '__main__':main()
🎀2.2 人工智能与机器学习在Apollo中的应用
Apollo利用人工智能和机器学习算法进行数据处理和分析,从而提高自动驾驶系统的感知、决策和控制能力。通过对大量数据的学习,Apollo能够不断优化和改进自身的驾驶能力。
以下是一些示例代码,展示了人工智能和机器学习在Apollo中的应用:

1. 目标检测:
from apollo.perception.detection import ObjectDetector# 创建目标检测器实例
detector = ObjectDetector()# 加载预训练模型
detector.load_model('path/to/model')# 输入图像进行目标检测
image = load_image('path/to/image')
detections = detector.detect(image)# 打印检测结果
for detection in detections:print(detection.class_label, detection.confidence, detection.box)
2. 目标跟踪:
from apollo.perception.tracking import ObjectTracker# 创建目标跟踪器实例
tracker = ObjectTracker()# 初始化跟踪器
tracker.initialize()# 处理连续帧进行目标跟踪
for frame in video_frames:detections = detector.detect(frame)tracked_objects = tracker.track(detections)# 打印跟踪结果for obj in tracked_objects:print(obj.id, obj.class_label, obj.bbox)
3. 行为预测:
from apollo.prediction.behavior_prediction import BehaviorPredictor# 创建行为预测器实例
predictor = BehaviorPredictor()# 加载预训练模型
predictor.load_model('path/to/model')# 输入历史轨迹数据进行行为预测
history_trajectory = load_trajectory_data('path/to/data')
predicted_behavior = predictor.predict(history_trajectory)# 打印预测结果
print(predicted_behavior)
🎀2.3 高精度地图与定位技术
高精度地图是Apollo自动驾驶的重要组成部分。它提供详细的道路信息和准确的定位数据,为自动驾驶车辆提供精准的导航和定位服务。借助高精度地图和定位技术,Apollo可以更加准确地感知周围环境并做出相应的决策。
对于高精度地图和定位技术,以下是一些示例代码分析:

1. 创建地图对象:
import apollomap = apollo.Map("path/to/map/file")
在这个示例中,我们使用Apollo提供的地图类创建了一个地图对象。通过指定地图文件的路径,我们可以加载地图数据。
2. 获取道路信息:
road_id = 12345
road = map.get_road(road_id)# 获取道路几何信息
geometry = road.geometry# 获取道路宽度
width = road.width# 获取道路限速信息
speed_limit = road.speed_limit
这段代码演示了如何从地图对象中获取道路信息。首先,我们使用
get_road()方法获取指定道路ID的道路对象。然后,我们可以从道路对象中获取几何信息、宽度和限速信息等。
3. 定位车辆:
import apollolocalizer = apollo.Localizer()# 获取传感器数据(例如GPS、惯性测量单元等)
sensor_data = get_sensor_data()# 进行定位
position = localizer.localize(sensor_data)# 获取定位结果
x = position.x
y = position.y
z = position.z
这段代码展示了如何使用Apollo提供的定位器进行车辆定位。首先,我们创建了一个定位器对象。然后,我们获取传感器数据,并将其传递给定位器的
localize()方法进行定位。最后,我们可以从定位结果中获取车辆的位置信息。
🎀2.4 感知与障碍物检测
Apollo自动驾驶通过感知技术和障碍物检测算法来识别道路上的车辆、行人、障碍物等。这些技术能够帮助Apollo准确地理解周围环境,从而做出适应性强且安全的驾驶决策。
下面是一个典型的感知与障碍物检测流程:

传感器数据获取:自动驾驶系统通常使用多种传感器,如激光雷达(Lidar)、摄像头和雷达等来获取环境信息。这些传感器可以提供车辆周围的距离、速度、方向和形状等数据。
数据预处理:从传感器获取的原始数据需要进行预处理,以去除噪声、校正畸变、对齐不同传感器之间的数据等。
障碍物分割与分类:通过激光雷达或摄像头数据,可以使用分割算法将场景中的障碍物从背景中分离出来。常见的分割算法包括语义分割、实例分割和背景建模等。分割后,可以使用识别和分类算法对障碍物进行分类,如车辆、行人、自行车等。
障碍物跟踪与运动估计:在连续的帧中,需要对障碍物进行跟踪,并估计其速度和运动轨迹。这可以通过使用滤波器(如卡尔曼滤波器)或深度学习模型来实现。
场景建图:将传感器数据中提取的障碍物信息与地图数据进行融合,构建车辆周围环境的三维场景地图。
以下是一些可能用于实现感知与障碍物检测的常见算法:
深度学习算法:卷积神经网络(CNN)在图像和点云数据上的应用广泛,可用于分割、识别和跟踪障碍物。常见的网络架构包括FCN、U-Net、YOLO、SSD等。
激光雷达处理算法:例如最小二乘法(Least Squares)、RANSAC(Random Sample Consensus)或分段线性回归(Segmented Linear Regression)用于拟合点云数据,以提取平面或障碍物形状。
运动估计算法:卡尔曼滤波器、扩展卡尔曼滤波器(EKF)或粒子滤波器(Particle Filter)可用于估计障碍物的位置和速度。
场景建图算法:常见的算法包括概率地图(Occupancy Grid)、OctoMap、地标图(Feature Map)等,用于将感知到的障碍物信息与先验地图进行融合。
🎀2.5 路径规划与决策算法
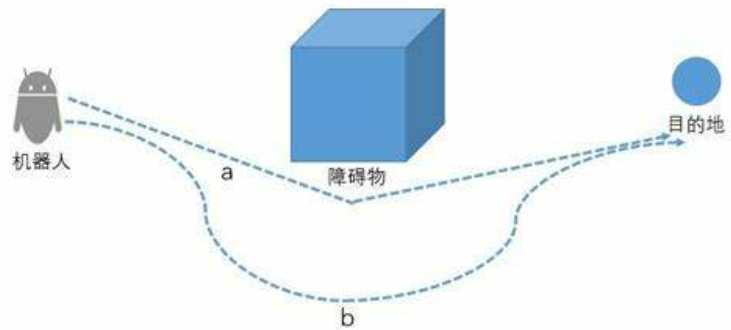
路径规划和决策算法是Apollo自动驾驶的关键组成部分。根据感知数据和目标要求,Apollo能够生成合适的行驶路径,并做出决策以应对不同的交通情况和障碍物。
🎀2.6 控制与执行系统
控制与执行系统负责将路径规划和决策转化为具体的车辆操作。通过精确的控制和执行,Apollo可以实现自动转向、加速、制动等操作,以确保安全和稳定的驾驶行为。
以下是一个简单的代码示例来说明控制与执行系统的工作原理:
def control_and_execute(decision):if decision == "turn_left":steer_left()elif decision == "turn_right":steer_right()elif decision == "accelerate":speed_up()elif decision == "brake":slow_down()else:maintain_speed()def steer_left():# 执行左转操作的代码def steer_right():# 执行右转操作的代码def speed_up():# 执行加速操作的代码def slow_down():# 执行减速操作的代码def maintain_speed():# 保持当前速度的代码# 路径规划和决策过程
decision = path_planning_and_decision()
control_and_execute(decision)
在上述代码中,control_and_execute() 函数接收路径规划和决策结果作为参数,并根据决策结果执行相应的操作。如果决策是左转,则调用 steer_left() 函数来执行左转操作;如果决策是右转,则调用 steer_right() 函数来执行右转操作;如果决策是加速,则调用 speed_up() 函数来执行加速操作;如果决策是减速,则调用 slow_down() 函数来执行减速操作;否则,调用 maintain_speed() 函数来保持当前速度。
୧⍤⃝Apollo在市场上的应用和前景
🎀3.1 Apollo自动驾驶在私家车领域的应用
Apollo自动驾驶在私家车领域的应用可以为驾驶员提供更便捷、安全的出行方式。它可以帮助驾驶员减轻驾驶负担,提高行车安全性,并节省通勤时间。随着技术的进一步发展和成熟,预计在未来,Apollo自动驾驶将逐渐普及并广泛应用于私家车市场。
🎀3.2 Apollo自动驾驶在商业运输领域的应用
在商业运输领域,Apollo自动驾驶可以提供更高效、安全的货物运输服务。自动驾驶卡车和无人机等技术将能够实现长途货运的自动化操作,降低运营成本并提高运输效率。这对于物流行业来说具有重要意义,并有望推动行业的创新和发展。
🎀3.3 Apollo自动驾驶的竞争对手分析
在自动驾驶领域,Apollo面临着来自其他公司和技术平台的竞争。例如,特斯拉、Waymo、Uber等公司也在自动驾驶技术方面进行了大量的研究和开发。竞争对手的不断涌现将推动整个行业的发展和进步。
🎀3.4 Apollo自动驾驶面临的挑战与未来发展趋势
尽管Apollo自动驾驶在技术上取得了重要的突破,但仍面临一些挑战。例如,法律和监管的限制、安全性和可靠性的考虑等都是需要解决的问题。未来,Apollo自动驾驶将继续致力于技术创新和改进,以应对这些挑战并推动自动驾驶技术的普及与发展。

相关文章:
登月再进一步:Apollo自动驾驶的里程碑
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站 「推荐专栏」: ★java一站式服务 ★ ★前端炫酷代码分享 ★ ★ uniapp-从构建到提升★ ★ 从0到英雄,vue成神之路★ ★ 解决算法,一个专栏就够了★ ★ 架…...
嵌入式一开始该怎么学?学习单片机
学习单片机: 模电数电肯定必须的,玩单片机大概率这两门课都学过,学过微机原理更好。 直接看野火的文档,芯片手册,外设手册。 学单片机不要纠结于某个型号,我认为stm32就OK,主要是原理和感觉。…...

Spring事件监听器ApplicationListener
目录 介绍 spirng启动后启动某方法 介绍 ApplicationEvent以及Listener是Spring为我们提供的一个事件监听、订阅的实现,内部实现原理是观察者设计模式,设计初衷也是为了系统业务逻辑之间的解耦,提高可扩展性以及可维护性。事件发布者并不需…...
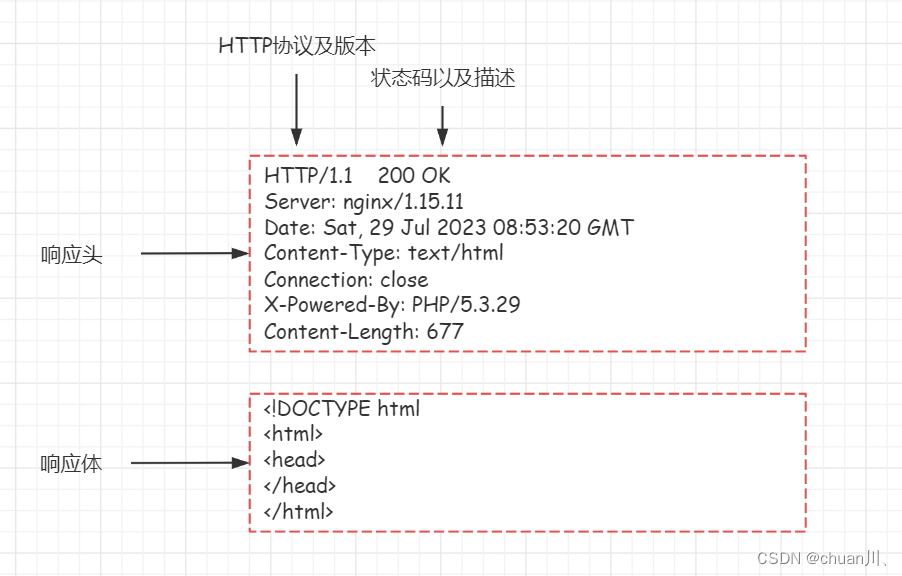
安全学习DAY10_HTTP数据包
HTTP数据包 文章目录 HTTP数据包小节导图Request请求数据包结构Request请求方法(方式)请求头(Header)Response响应数据包结构Response响应数据包状态码状态码作用:部分状态码详解判断网站文件是否存在的状态码…...
云原生落地实践的25个步骤
一、什么是云原生? 云原生从字面意思上来看可以分成云和原生两个部分。 云是和本地相对的,传统的应用必须跑在本地服务器上,现在流行的应用都跑在云端,云包含了IaaS,、PaaS和SaaS。 原生就是土生土长的意思,我们在开始…...

Stable diffusion 三大基础脚本 提示词矩阵,载入提示词,XYZ图表讲解
目录 0.本章讲解 1.提示词矩阵(prompt matrix) 1.2.提示词矩阵功能选项 1.2.1.把可变部分放在提示词文本的开头 1.2.2.为每张图片使用不同随机种子 1.2.3.选择提示词 1.2.4.选择分割符 1.2.5.宫格图边框(像素) 2.从文本框或文件载入提示词(Pro…...
uniapp uni-combox 下拉提示无匹配项(完美解决--附加源码解决方案及思路)
问题描述 匆匆忙忙又到了周一啦,一大早就来了一个头疼的问题,把我难得团团转,呜呜呜~ 下面我用代码的方式展示出来,看下你的代码是否与我的不同。 解决方案 <uni-forms-item label"名称" name"drugName&quo…...

10. Mybatis 项目的创建
目录 1. Mybatis 概念 2. 第一个 Mybits 查询 2.1 创建数据库和表 2.2 添加 Mybatis 框架支持 2.3 添加配置文件 2.4 配置 MyBatis 中的 XML 路径 2.5 添加业务代码 在学习 Mybatis 之前,我们需要知道 Mybatis 和 Spring 没有任何的关系。如果一定要强调二者…...
简介)
历年 Nobel prize in Physics (诺贝尔物理学奖)简介
历年 Fields Medal 与 Nobel prize in Physics 简介 Nobel prize in Physics 1901年12月10日 诺贝尔逝世5周年纪念日首次颁发诺贝尔奖。1916年 第一次世界大战 1914.7 至 1918.11诺贝尔物理学奖空缺1931年诺贝尔物理学奖空缺1934年诺贝尔物理学奖空缺1940年—1942年 第二次世界…...
IDEA中Git面板操作介绍 变基、合并、提取、拉取、签出
IDEA中Git面板操作介绍 变基、合并、提取、拉取、签出 面板介绍 变基、合并 提取、拉取 签出、Checkout 面板介绍 如图,在IDEA的Git面板中,仓库会分为本地仓库和远程仓库,代码仓库里面放的是各个分支。 分支前面的书签🔖标志…...

Android Studio开发简易APP添加代办事项
创建xml布局页 <?xml version="1.0" encoding="utf-8"?> <LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"xmlns:tools="http://schemas.android.com/tools"android:layout_width...
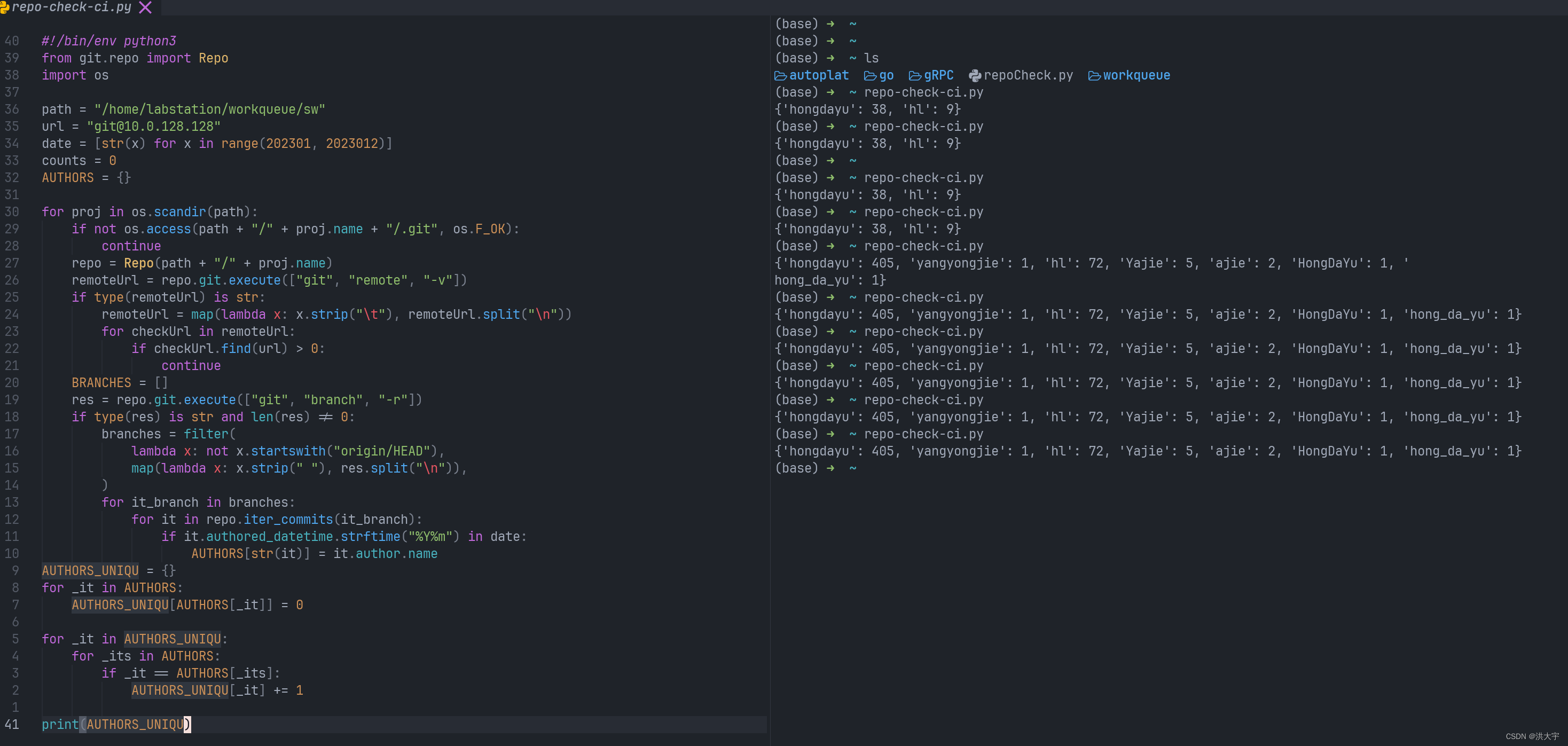
python 统计所有的 仓库 提交者的提交次数
字典去重 YYDS 然后再写入excel 表 yyds #!/bin/env python3 from git.repo import Repo import os import pandas as pdspath "/home/labstation/workqueue/sw" url "git10.0.128.128" date [str(x) for x in range(202307, 202308)] datefmt "%…...
)
018-从零搭建微服务-系统服务(五)
写在最前 如果这个项目让你有所收获,记得 Star 关注哦,这对我是非常不错的鼓励与支持。 源码地址(后端):https://gitee.com/csps/mingyue 源码地址(前端):https://gitee.com/csps…...

HarmonyOS 开发基础(三)登录页面单向数据绑定(父组件向子组件传参)
一、目录结构认识 开发软件目录截图部分文件夹说明 文件组织结构图 二、完成单向数据绑定 index.etx // 导出方式直接从文件夹 import MyInput from "../common/commons/myInput" Entry Component /* 组件可以基于struct实现,组件不能有继承关系&am…...
发npm包
重点文件 .github -> workflow -> .yml文件 发自己的包 新建dev分支,合并到master后自动执行 fork别人的包 fork -> base dev新建本地rebase-dev分支 -> 提交push后合并至dev -> dev合并至master后自动执行 值得注意的是,fork别人的…...
<el-empty>
<el-empty> 是 Element UI 框架中提供的一个组件,用于显示空状态的占位内容。Element UI 是一套基于 Vue.js 的组件库,用于构建响应式和易用的用户界面。 <el-empty> 组件在应用中常用于以下场景: 当数据为空时,可以…...
IO流(4)- 序列化流与反序列化流
目录 1. 序列化流与反序列化流的基本介绍 2. 序列化流的基本用法? 3. 序列化流的作用? 4. 反序列化流的基本用法? 5. 反序列化流的作用 6. 序列化流与反序列化流使用时需要注意的细节(非常重要) 6.1 被序列化的…...

人工智能如何应对 DevOps 监控和可观测性挑战
自 ChatGPT 横空出世之后,AIGC 已成为不可逆转的时代浪潮。在之前的文章中,我们介绍了DevOps 领域中AI的用例,需要回顾可以点击下方链接。在本篇文章中,我将简单聊聊人工智能(AI)如何通过分析日志和指标来预…...

数字化新时代,VR全景拍摄与制作
导语: 随着科技的飞速发展,数字化图片正在引领新的时代潮流。在这个数字化图片的新时代,VR全景拍摄与制作技术正以其独特的特点和无限的优势,成为数字影像领域的一颗璀璨明星。让我们深入了解VR全景拍摄与制作的特点和优势&#…...

uniapp 权限说明
android.permission.ACCESS_CHECKIN_PROPERTIES 访问登记属性 读取或写入登记check-in数据库属性表的权限 android.permission.ACCESS_COARSE_LOCATION 获取错略位置 通过WiFi或移动基站的方式获取用户错略的经纬度信息,定位精度大概误差在30~1500米 android.permission.ACCESS…...

避开这3个坑,你的软考数据库设计题至少多拿10分:从E-R图合并冲突到SQL约束实战
软考数据库设计题避坑指南:从E-R图到SQL约束的实战技巧 每次软考结束,总有一批考生捶胸顿足——"那道数据库设计题明明会做,怎么又丢分了?"作为参加过三次软考阅卷的数据库讲师,我发现90%的失分都集中在几个…...

DeepSeek-Coder-V2-Lite-Instruct社区成功案例:开发者如何用AI助手实现项目突破
DeepSeek-Coder-V2-Lite-Instruct社区成功案例:开发者如何用AI助手实现项目突破 【免费下载链接】DeepSeek-Coder-V2-Lite-Instruct 开源代码智能利器——DeepSeek-Coder-V2,性能比肩GPT4-Turbo,全面支持338种编程语言,128K超长上…...

LockSupport深度解析:线程阻塞与唤醒的底层实现原理
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...
)
ClickHouse数据报表实战:如何把分组后的明细‘压缩’成一行摘要(附完整SQL)
ClickHouse数据报表实战:高效聚合多行文本的工程化解决方案 在数据分析与报表生成的实际业务场景中,我们经常遇到这样的需求:需要将同一维度下的多条文本明细(如用户行为日志、错误信息、月份列表等)合并成一条简洁的摘…...

突破4大技术壁垒!MediaPipe TouchDesigner让实时视觉交互创作效率提升300%
突破4大技术壁垒!MediaPipe TouchDesigner让实时视觉交互创作效率提升300% 【免费下载链接】mediapipe-touchdesigner GPU Accelerated MediaPipe Plugin for TouchDesigner 项目地址: https://gitcode.com/gh_mirrors/me/mediapipe-touchdesigner 核心价值&…...

DataQA数问增长:金融小贷行业的“智能风控大脑“实战揭秘
数问"Web渠道转化率仅0.2,欺诈风险高、客户资质差——你的渠道投放预算,有多少正在打水漂?" 💡 真实场景还原:某头部消费金融公司的渠道危机 时间:2026年3月,周一上午9:00 角色&…...
)
基于物理信息神经网络的Burgers-Fisher方程求解方法研究(Python代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

0基础SEO优化的关键点有哪些
0基础SEO优化的关键点有哪些 在互联网时代,SEO(搜索引擎优化)已经成为了每一个网站运营者必须掌握的一项技能。特别是对于0基础的SEO优化者来说,这是一条充满挑战但也充满机遇的道路。0基础SEO优化的关键点有哪些呢?本…...

Gemma-3-270m多场景落地:政务热线知识库问答、医疗术语解释系统
Gemma-3-270m多场景落地:政务热线知识库问答、医疗术语解释系统 1. 快速上手:部署你的第一个Gemma-3-270m服务 想要快速体验Gemma-3-270m的强大能力?通过Ollama部署只需几个简单步骤。 1.1 环境准备与模型选择 首先确保你已经安装了Ollam…...

特朗普政府发布《国家人工智能立法框架》,多维度布局AI领域
【《国家人工智能立法框架》六大核心目标锚定AI发展方向】特朗普政府发布的《国家人工智能立法框架》,意在通过统一国家政策确保美国在AI领域的全球领先地位。该框架包含六大核心目标,分别是保护儿童与赋能家长、维护与强化美国社区、尊重知识产权与支持…...